A Torque Vectoring Control for Enhancing Vehicle Performance in Drifting



Abstract
:1. Introduction
2. Simulation Models
- Vehicle (14 d.o.f.);
- Tire;
- Electric motor;
- Driver; and
- Control strategy.
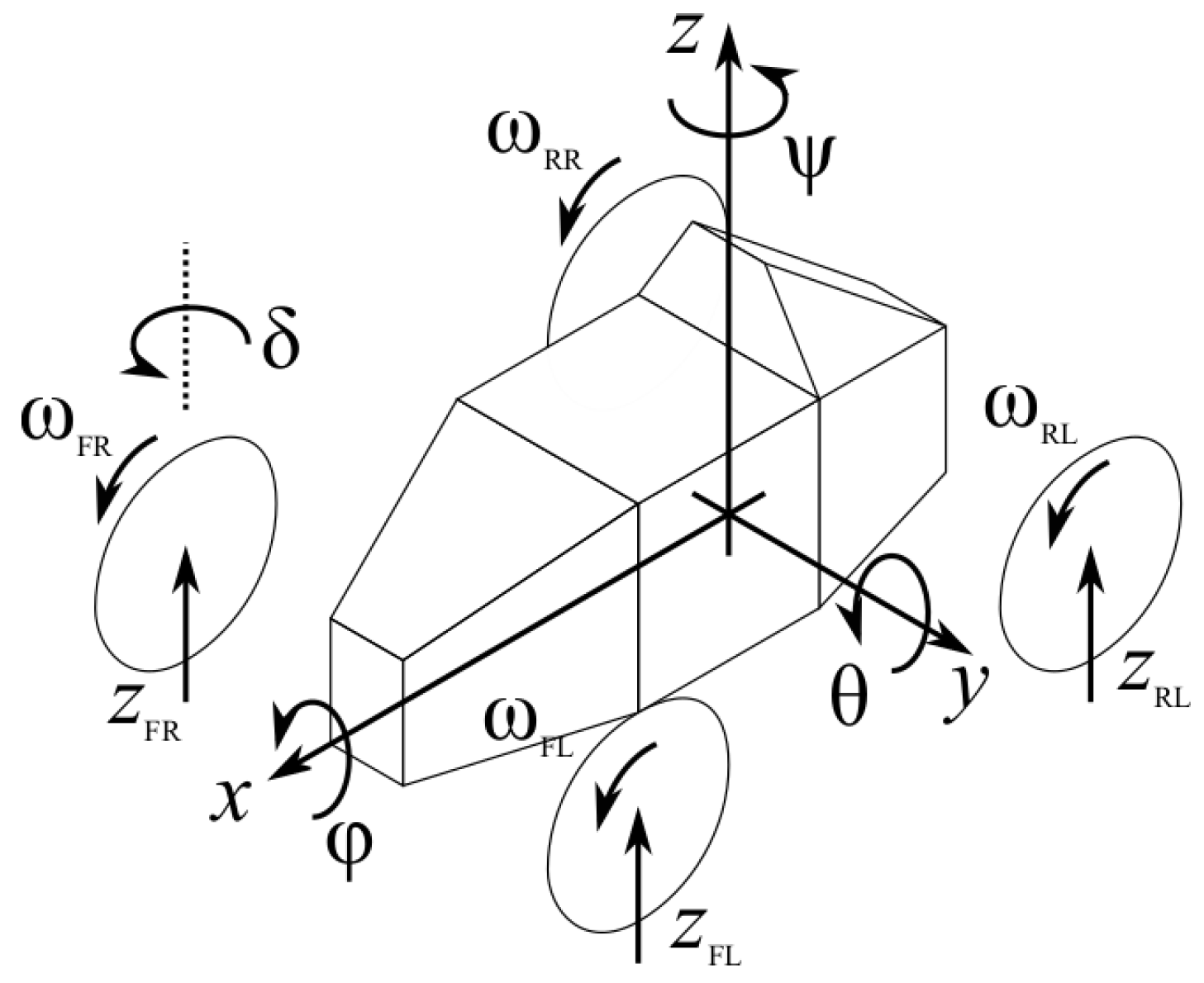
2.1. Vehicle Model
- The three displacements of the vehicle center of mass;
- Three rotations about the vehicle center of mass (yaw, pitch, and roll);
- Four vertical displacements of unsprung masses; and
- Four wheel angular velocities about the hub axis.
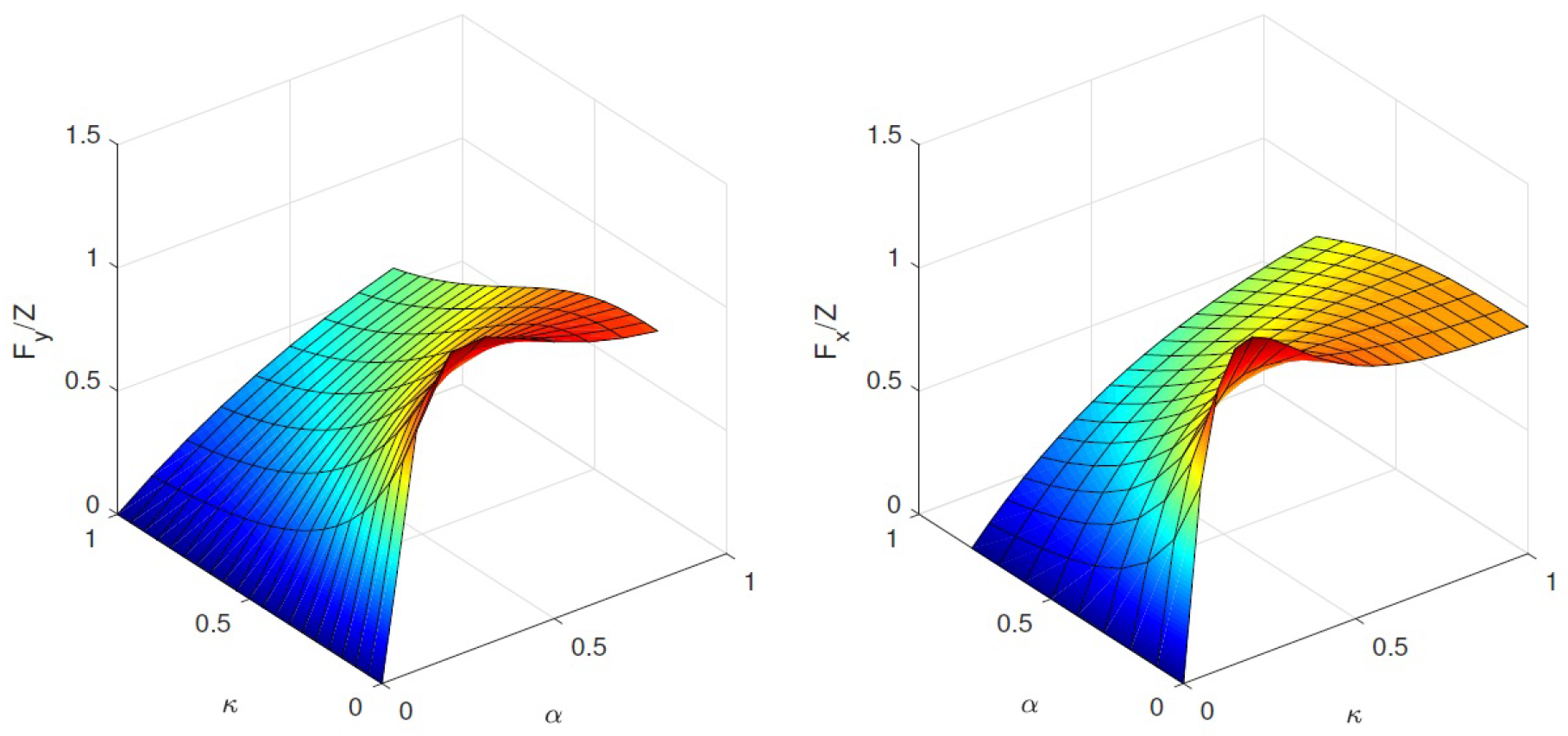
2.2. Tire Model
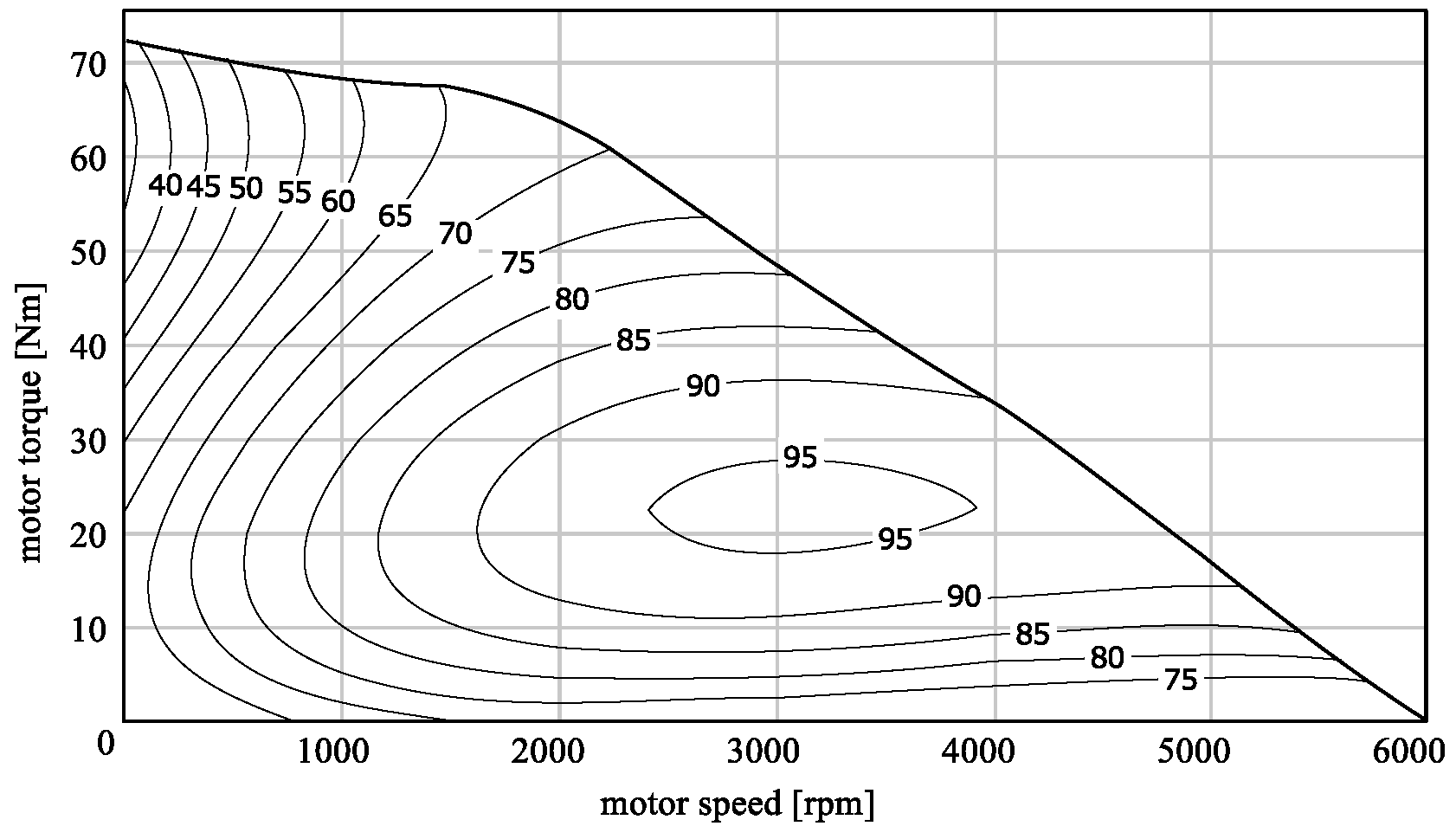
2.3. Electric Motor Model
2.4. Driver Model
2.5. Close Loop Driver Model
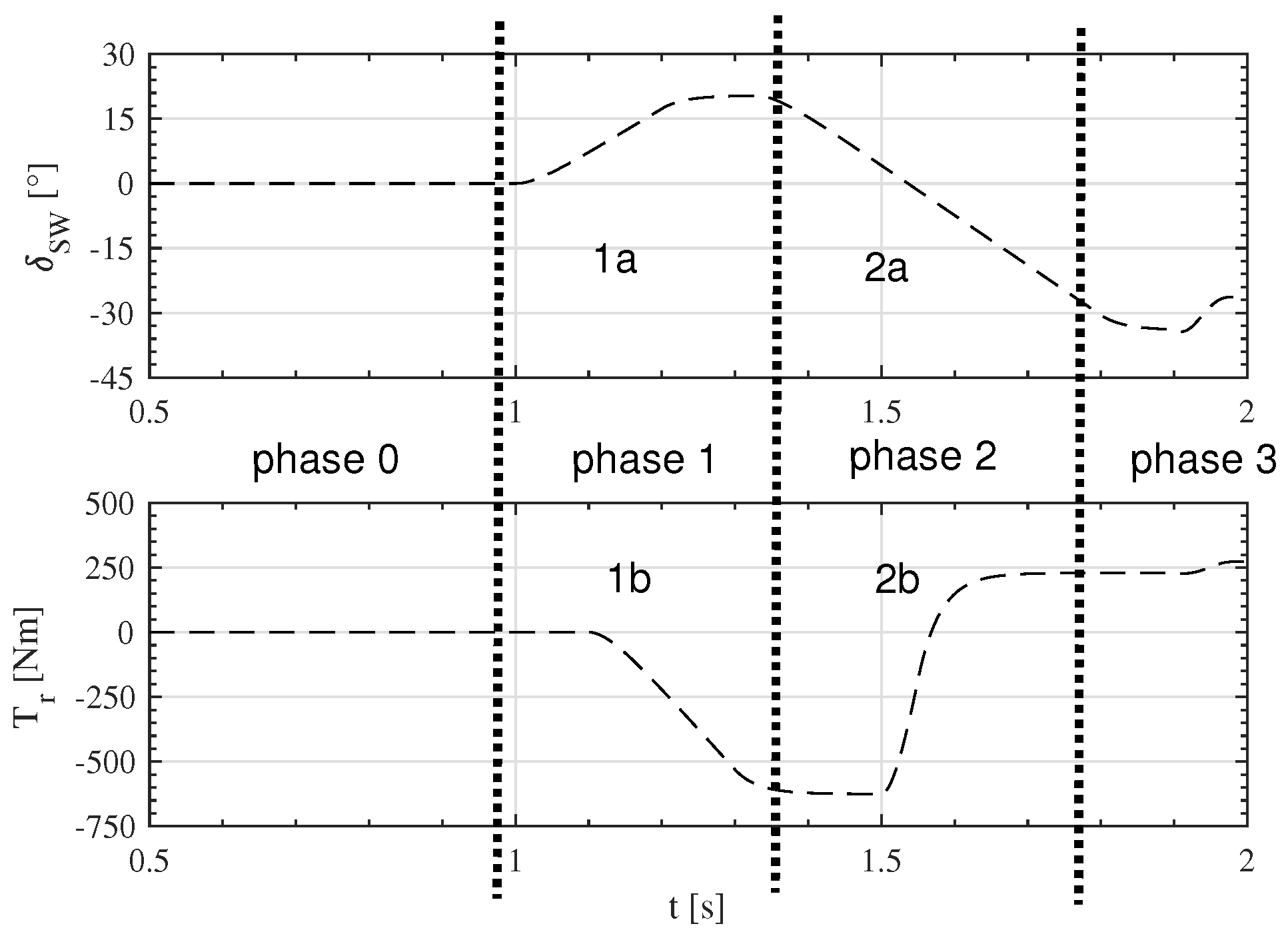
2.6. Open-Loop Steer Actuation
- 0
- Straight forward driving;
- 1a
- Apply a strong braking torque at the rear wheels (e.g., a handbrake actuation);
- 1b
- Apply a strong steering stroke in the direction of the turn;
- 2a
- Cancel braking torque and accelerate;
- 2b
- Countersteer;
- 3
- Switch to feedback driver model in drift condition.
2.7. Vehicle Equilibria and Input Effects
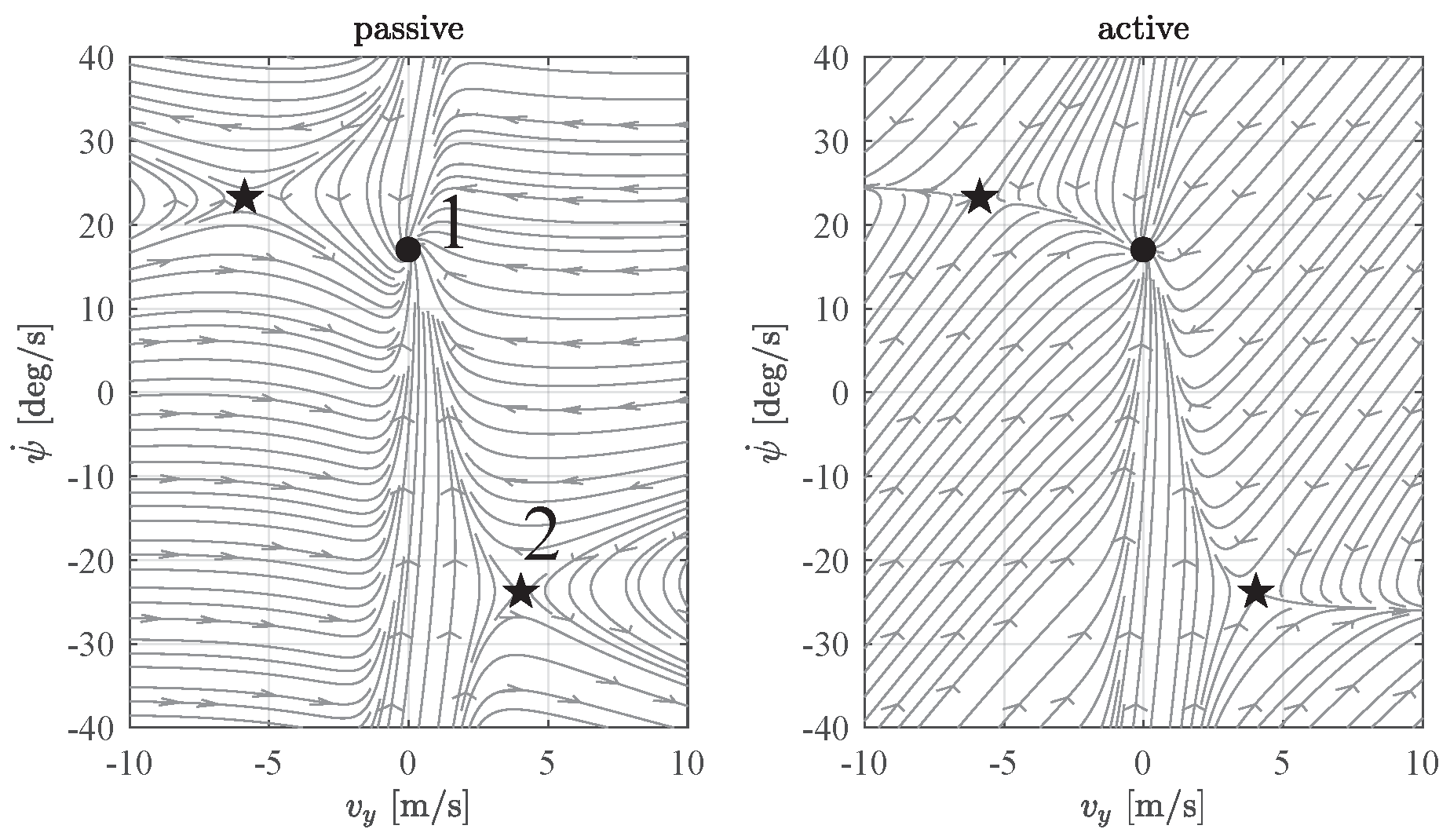
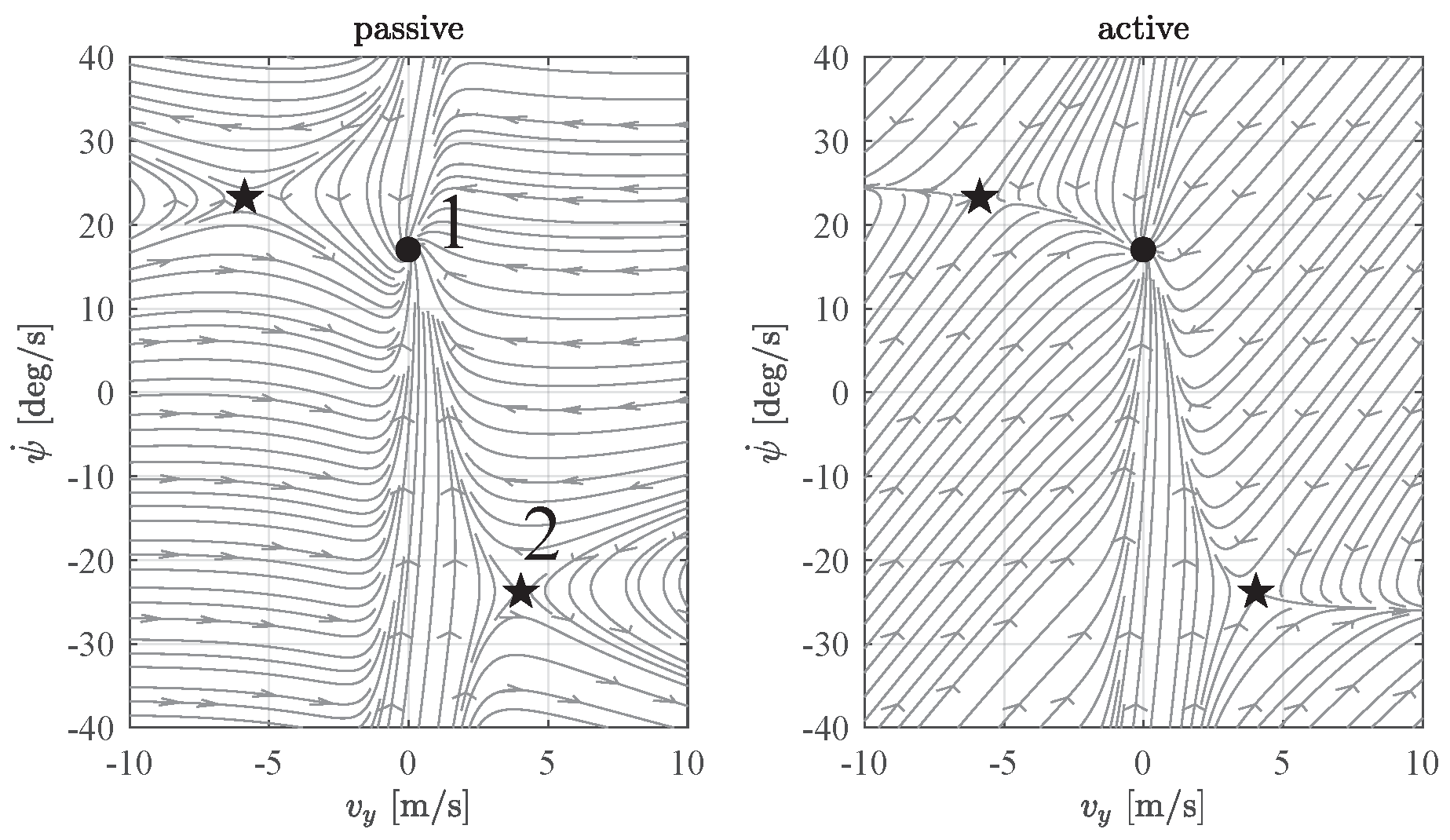
2.7.1. Phase Portrait
- Constant forward speed .
- The resultant of the contact forces acting on each axle are applied in the center of the axle itself.
- Lateral load transfers are accounted for by considering steady-state axle characteristics.
- The longitudinal slip of the rear axle is accounted for as described in the following, while the front axle has no driving/braking force.
- Small steering angles are considered.
2.7.2. Input Effect on Vehicle Dynamics
- —front lateral force, which is directly affected by the steering angle;
- —rear longitudinal force, which is directly controlled by gas pedal ;
- —the difference in left and right rear longitudinal forces induced by yaw moment .
- In straight driving, the gas pedal (i.e., ) did not affect the sideslip angle or the yaw rate dynamics (). The steering angle and the torque-vectoring moment instead had comparable effects on yaw rate while the effect on sideslip angle was null for TV. This was because had a higher-order contribution to the combined slip effect of the axle since the total driving force was not affected by .
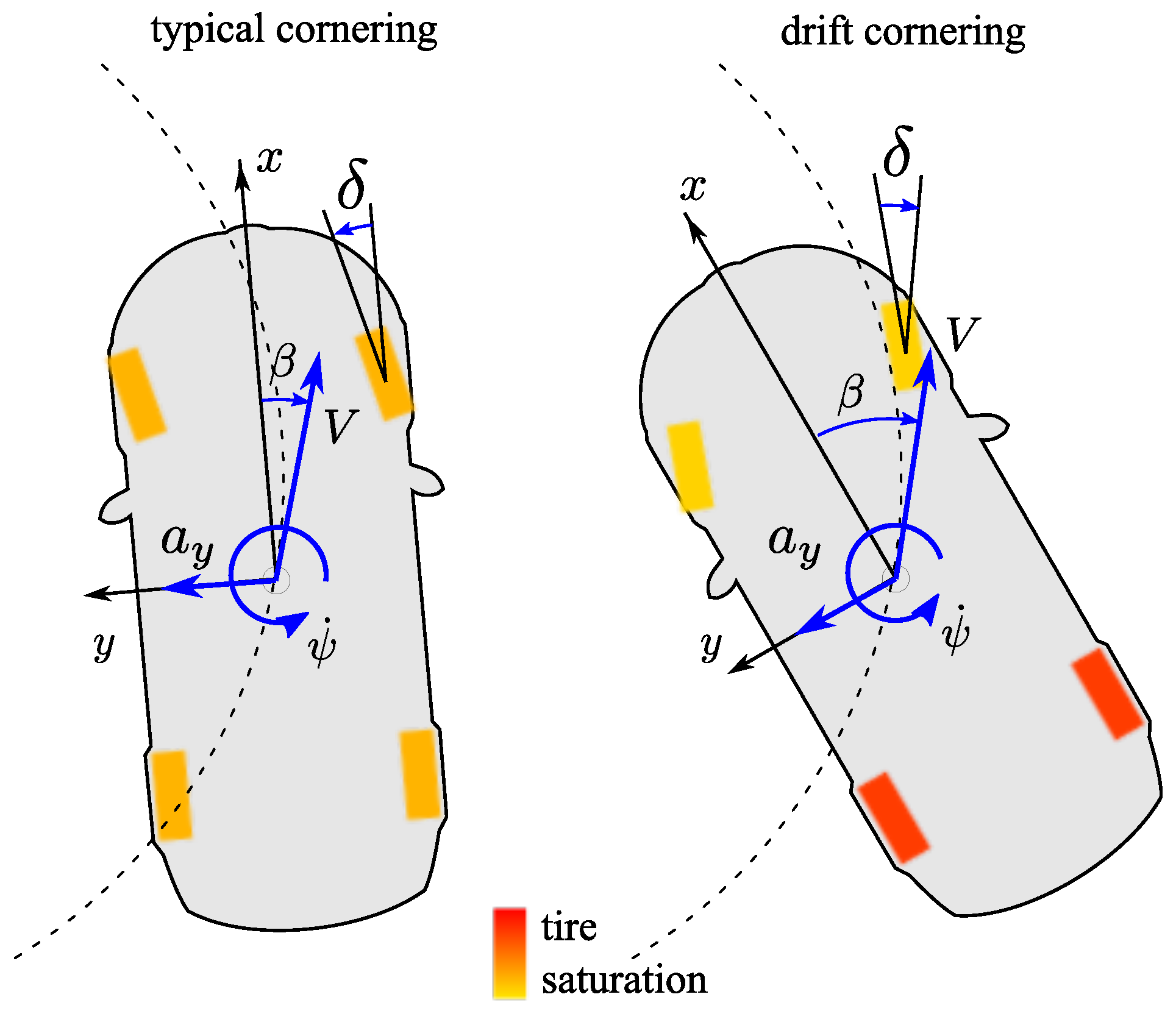
- In typical cornering, the effects were similar to those of straight driving but a small coupling effect of gas pedal was noticed on both sideslip angle and yaw rate. However, these effects were two orders of magnitude smaller than steering wheel effects. Again, the effect of TV on yaw rate was comparable to that of steering wheel.
- In drift cornering, the effects of the gas pedal became higher and comparable with those of steering wheel and TV. Again, the effects of steering wheel and TV on yaw rate were comparable.
3. Drift Torque-Vectoring Active Control
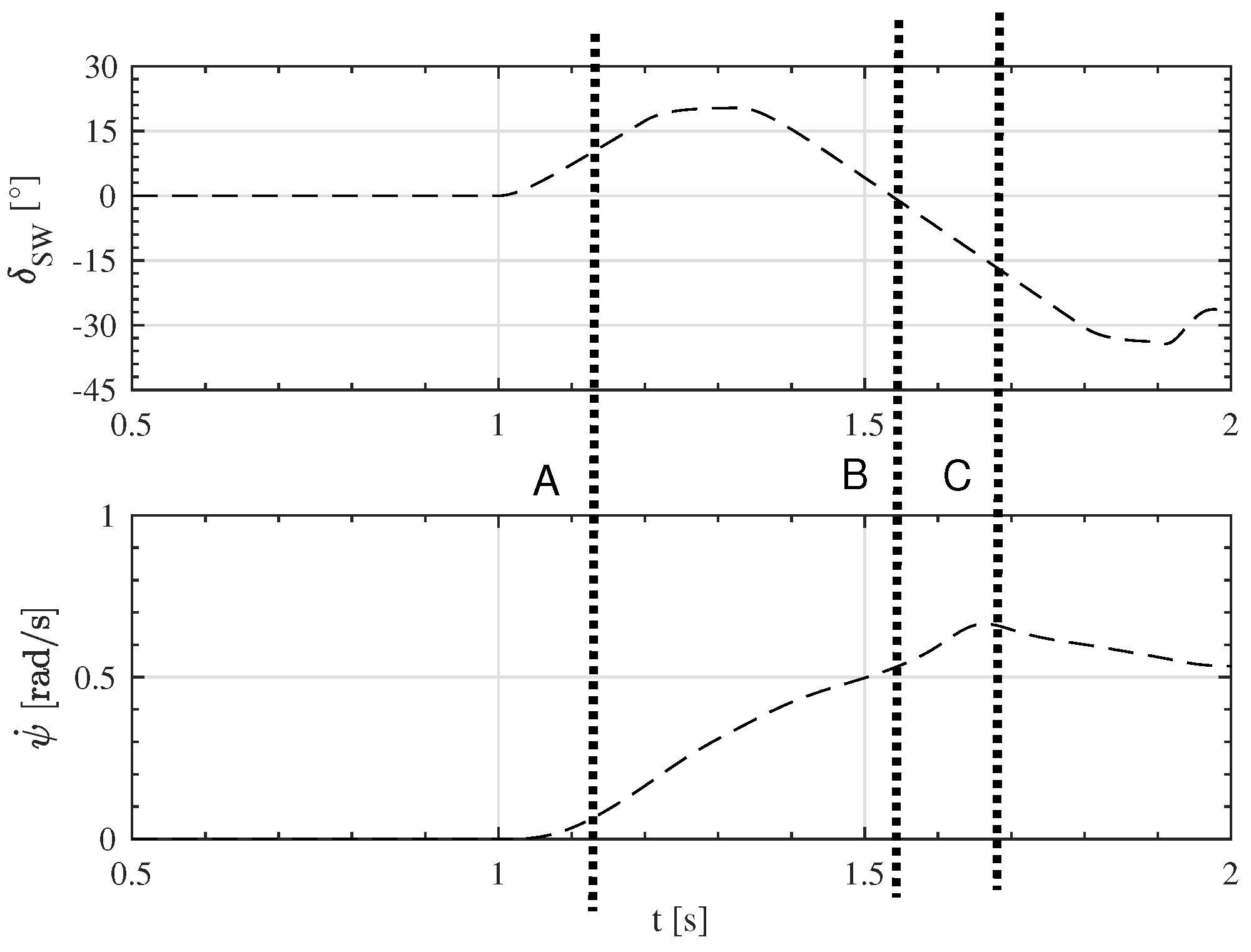
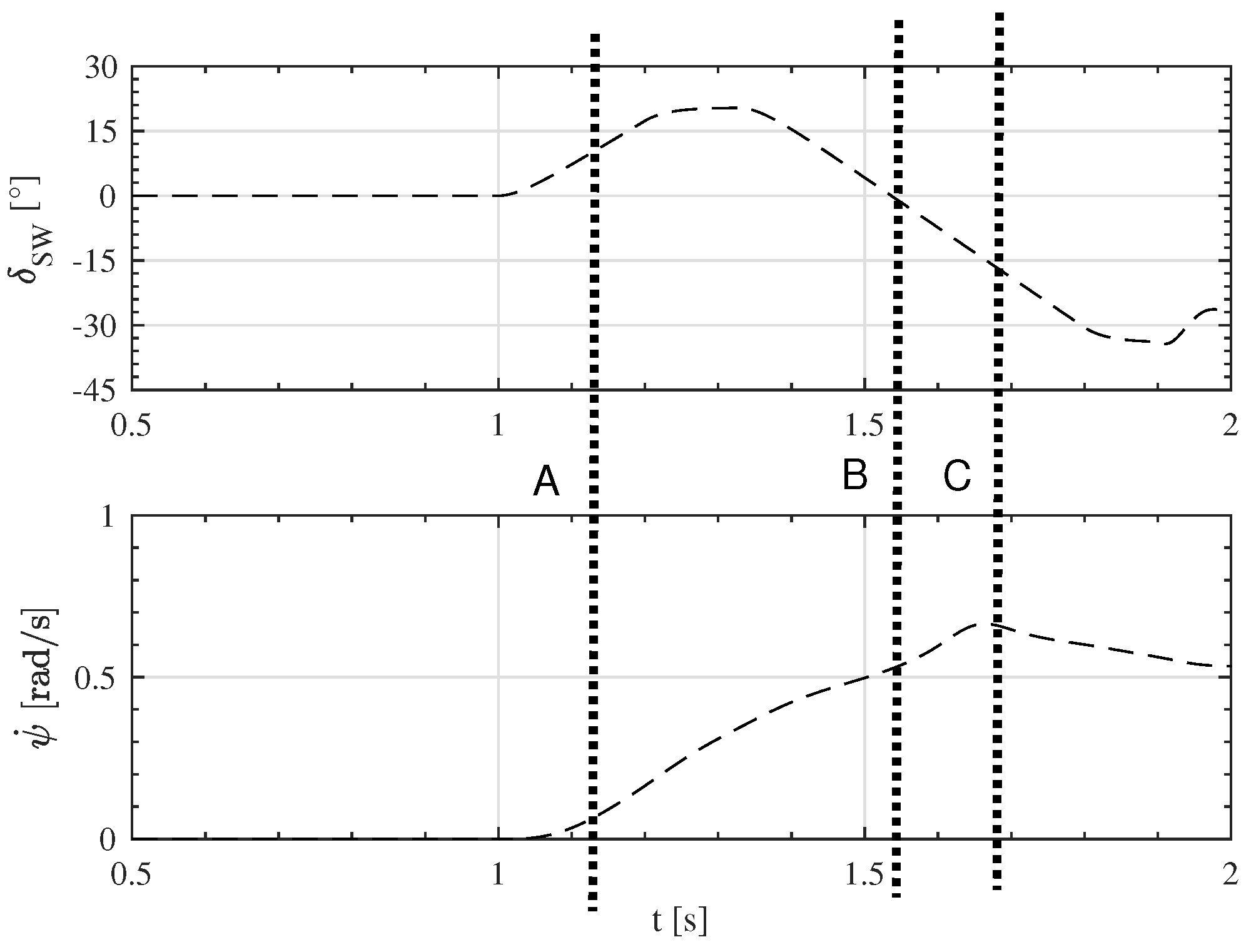
3.1. Control Activation Conditions
- Condition A
- identifies the entrance in a turn by looking at the yaw rate of the vehicle. A small threshold is used to avoid intervention due to measurement noise. Condition A reads:
- Condition B
- identifies the beginning of the counter-steering action by the driver. Condition B thus reads:
- Condition C
- identifies the beginning of the drift due to the permanence of the steering wheel in counter-steer condition:where for robustness both and are accounted for by means of their average value evaluated ( and ) with a moving average window of 0.5 s.
3.2. Control Deactivation Conditions
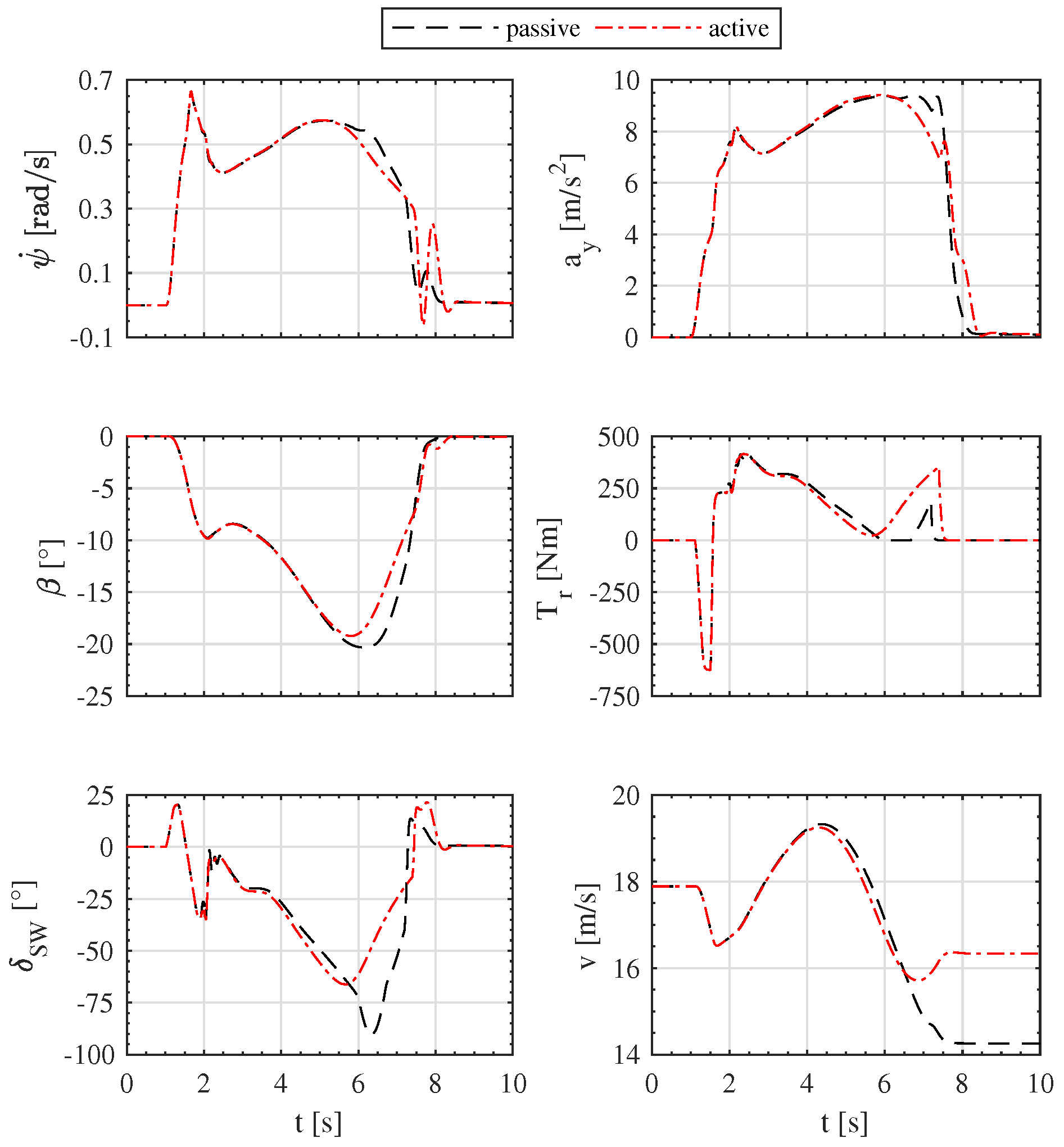
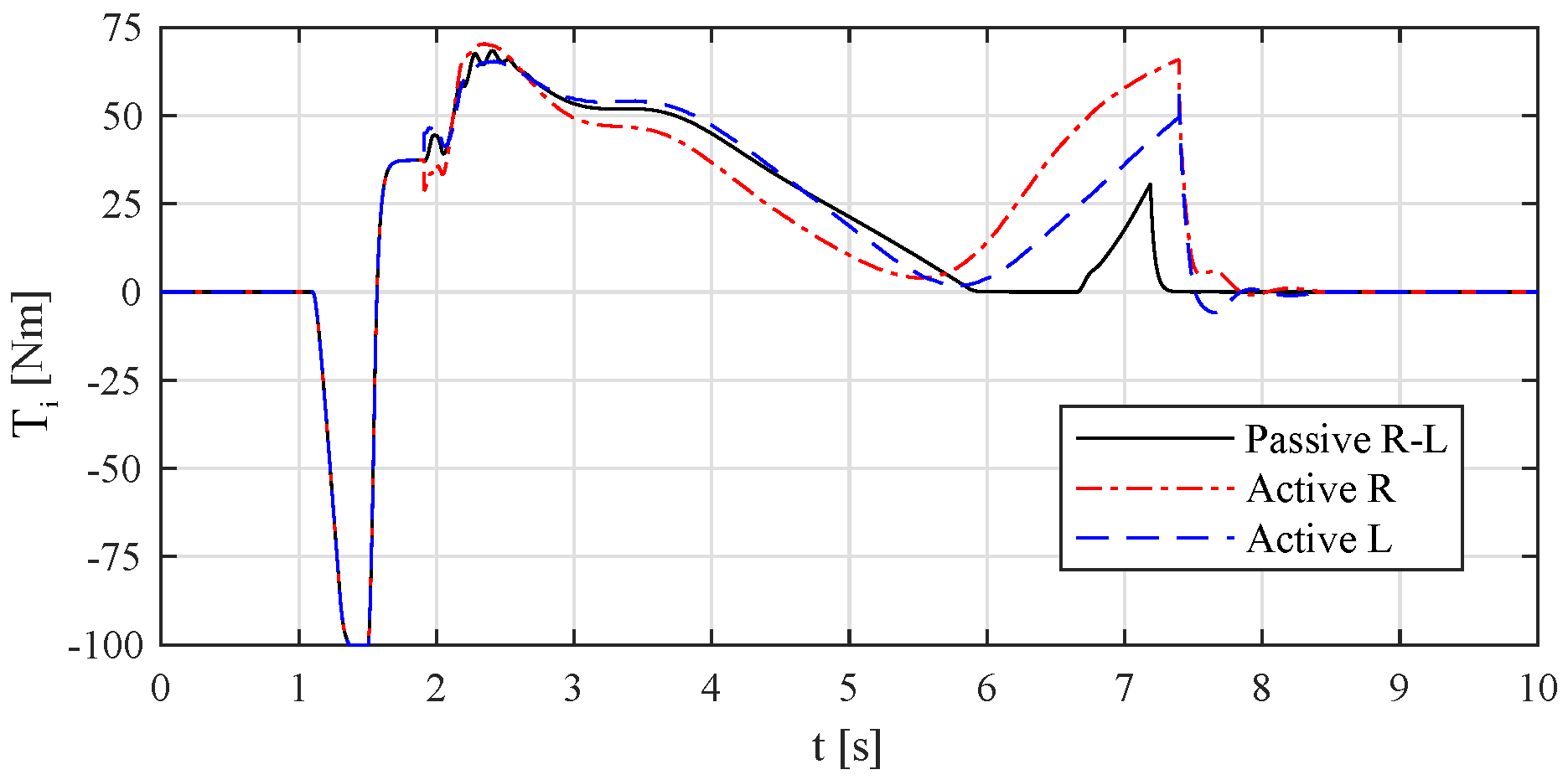
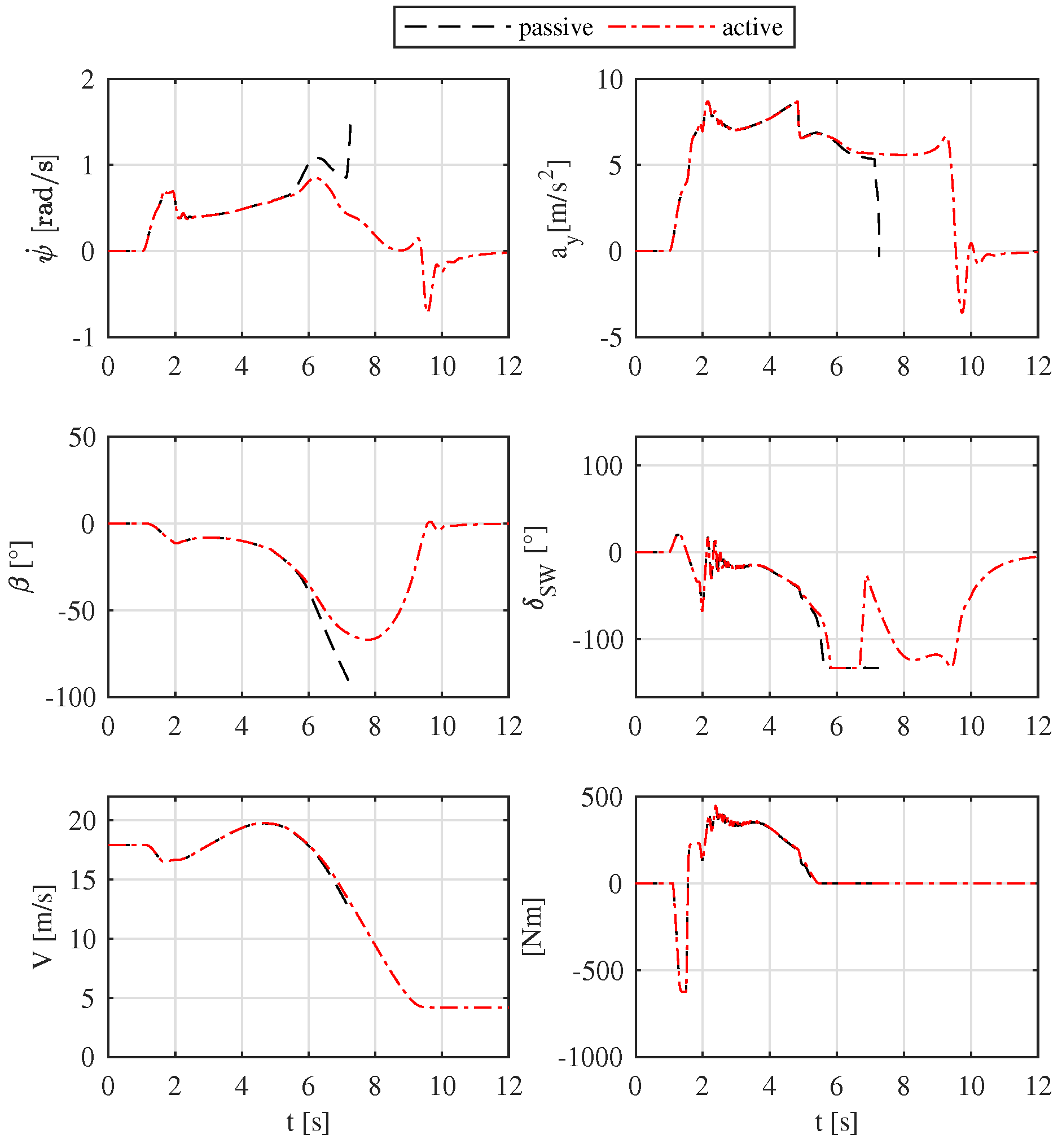
4. Simulation Results
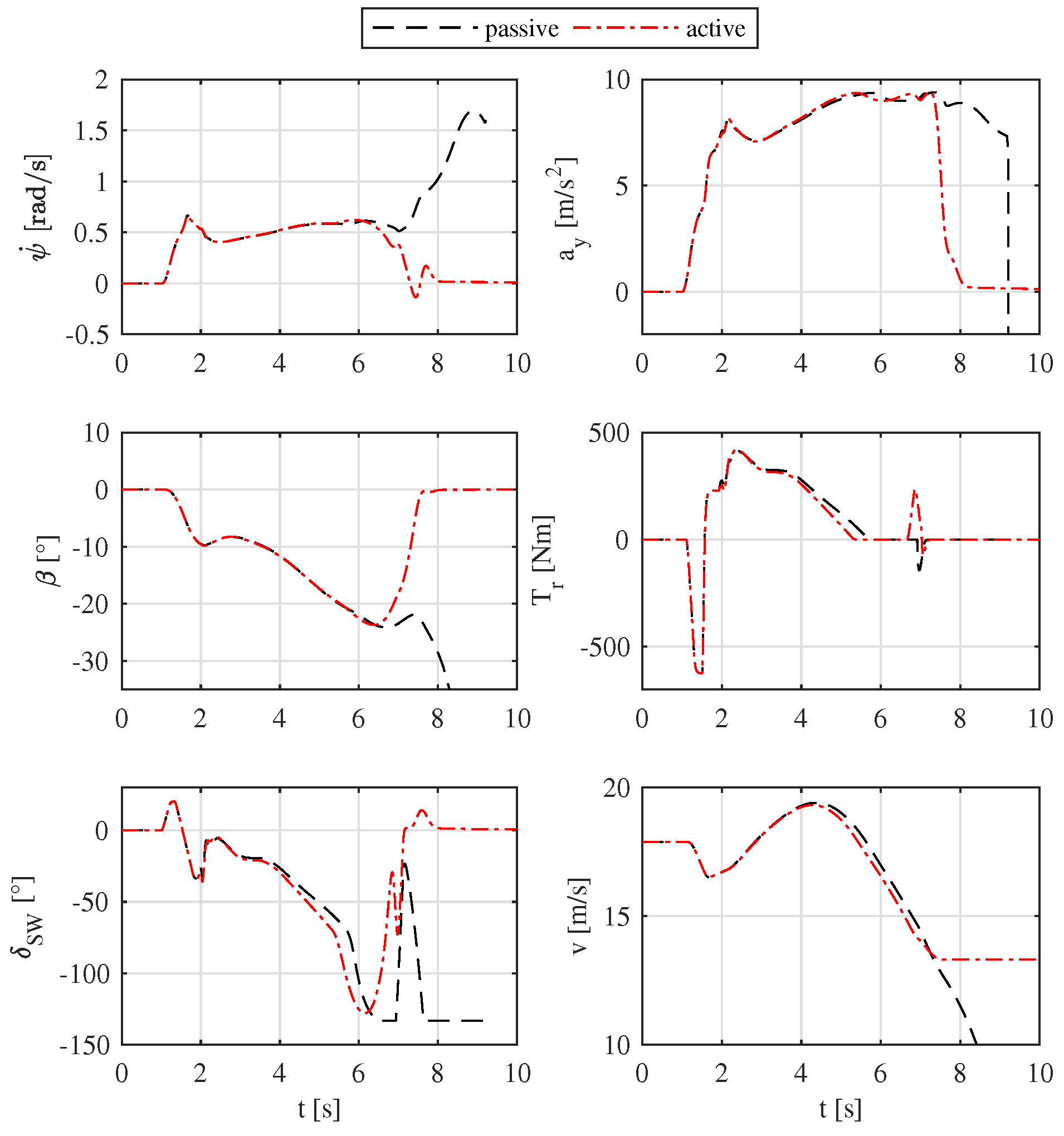
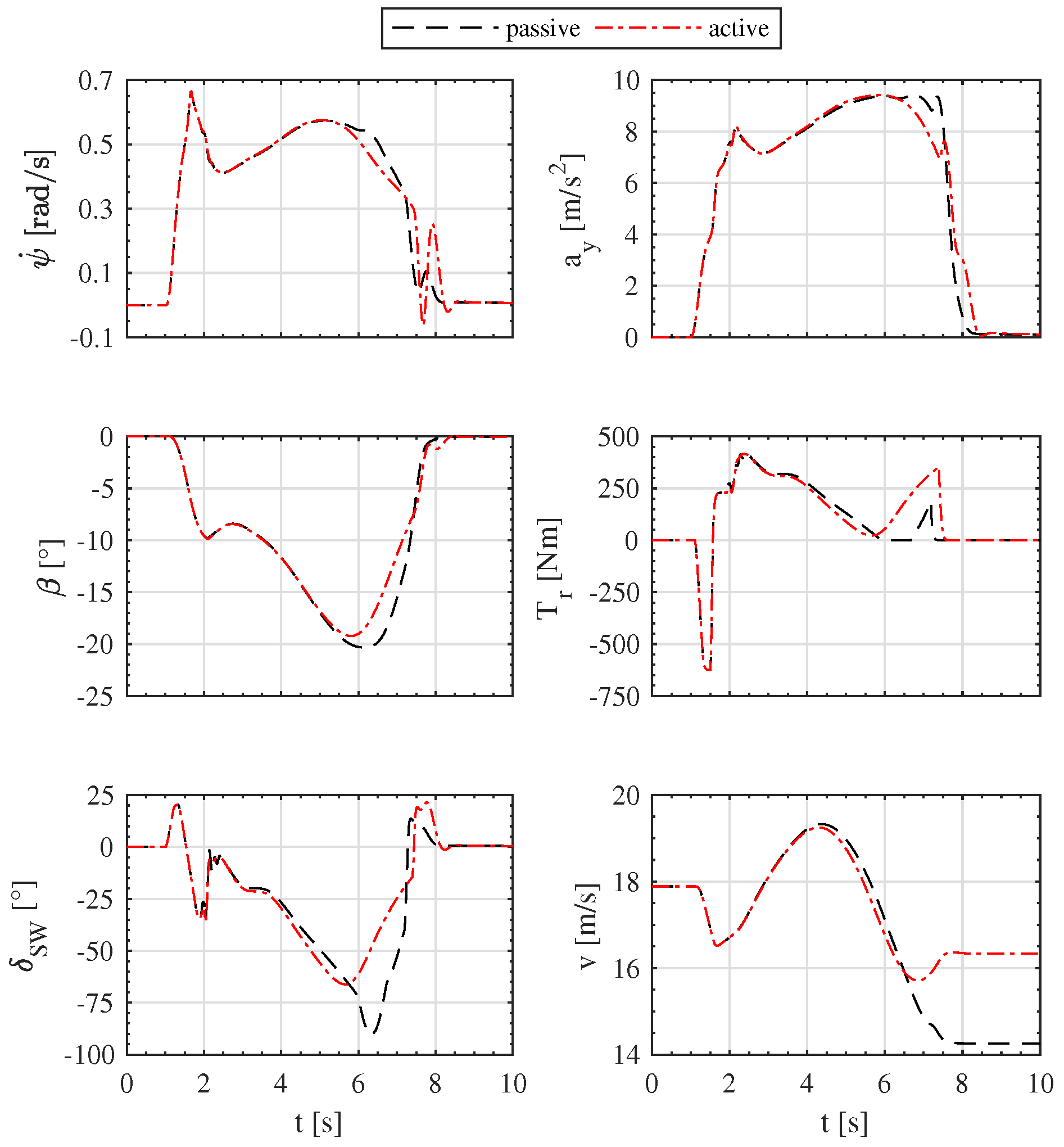
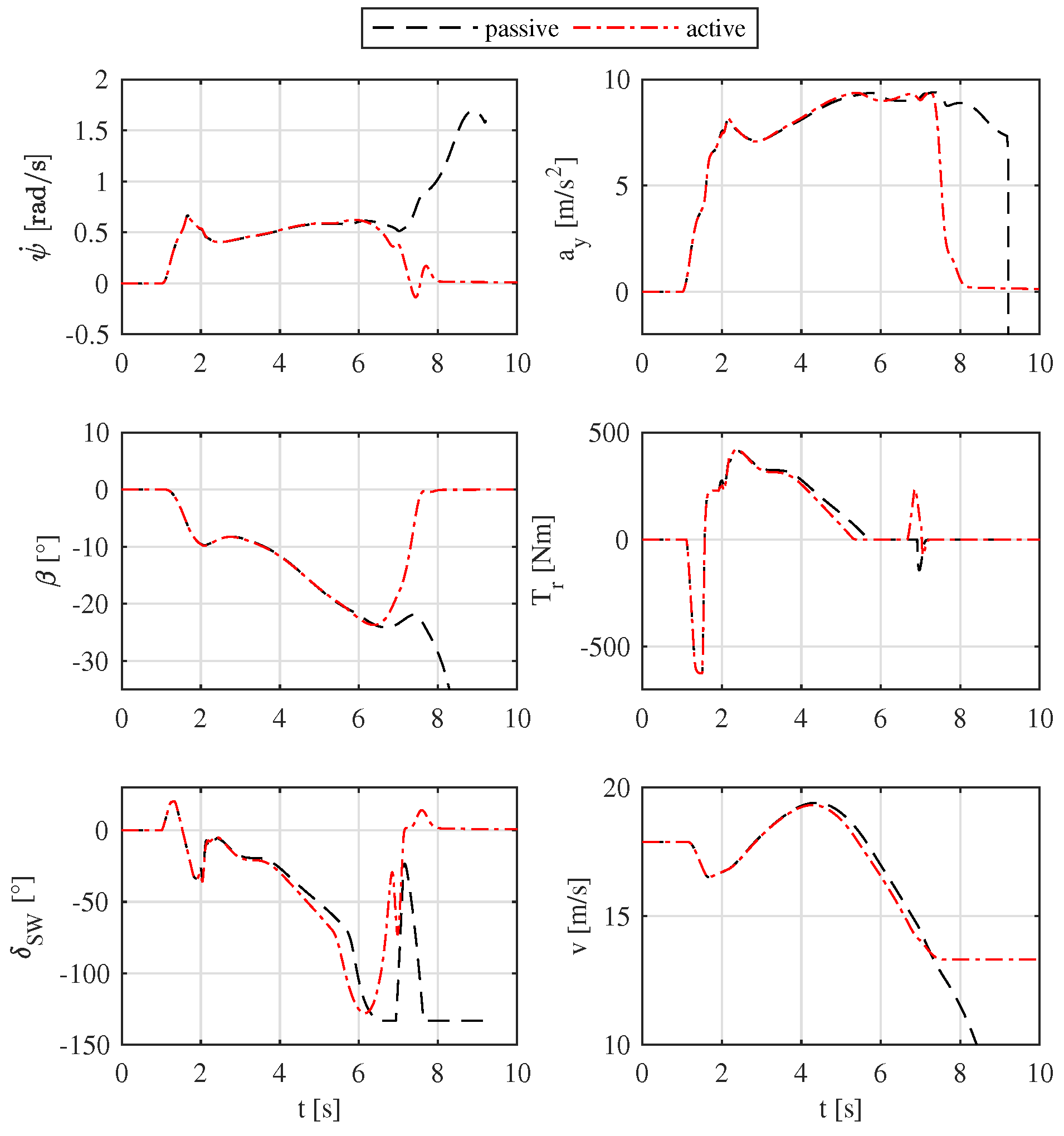
- Vehicle yaw rate ;
- Vehicle lateral acceleration ;
- Vehicle sideslip angle ;
- Driver required driving torque ;
- Steering wheel angle ;
- Vehicle speed V.
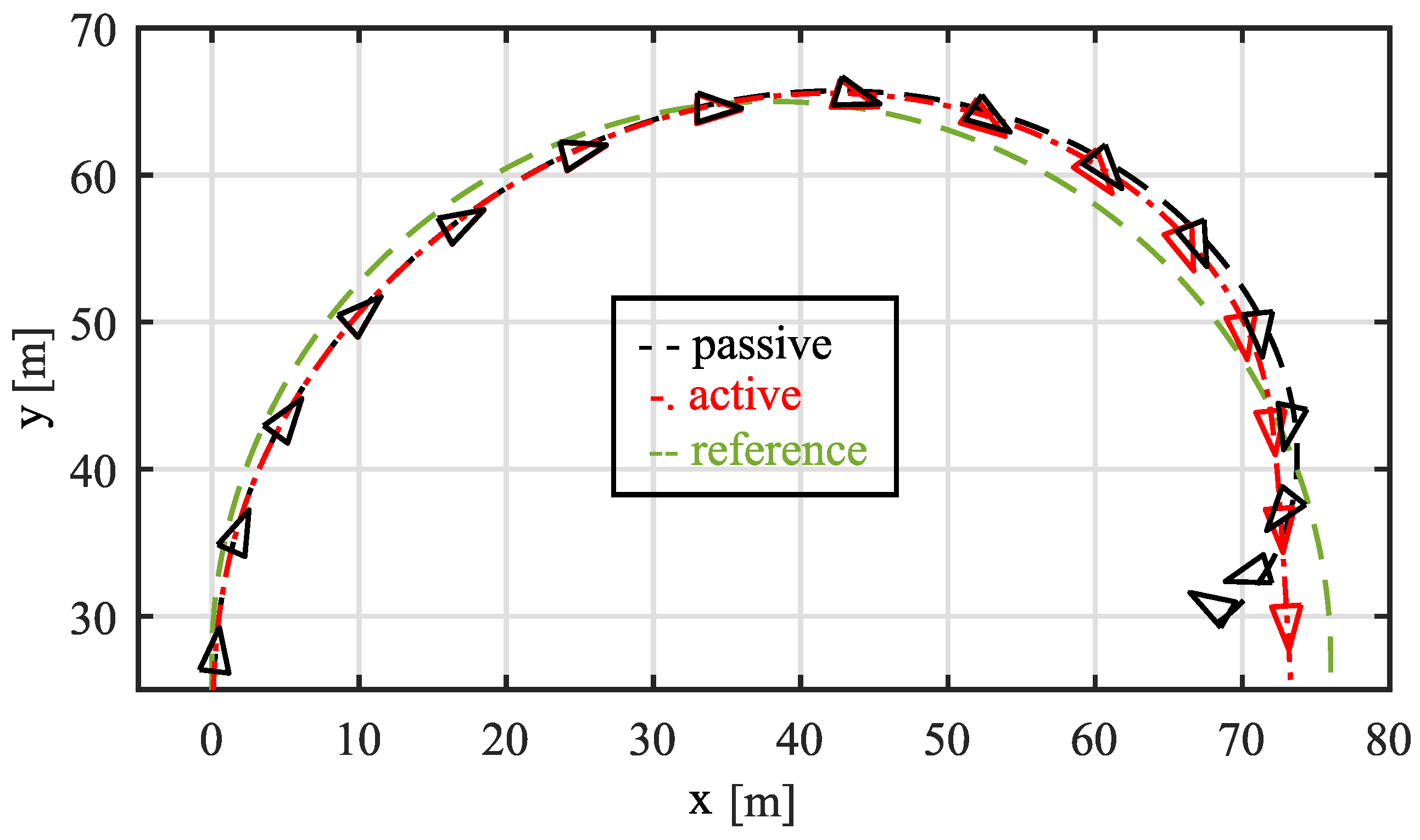
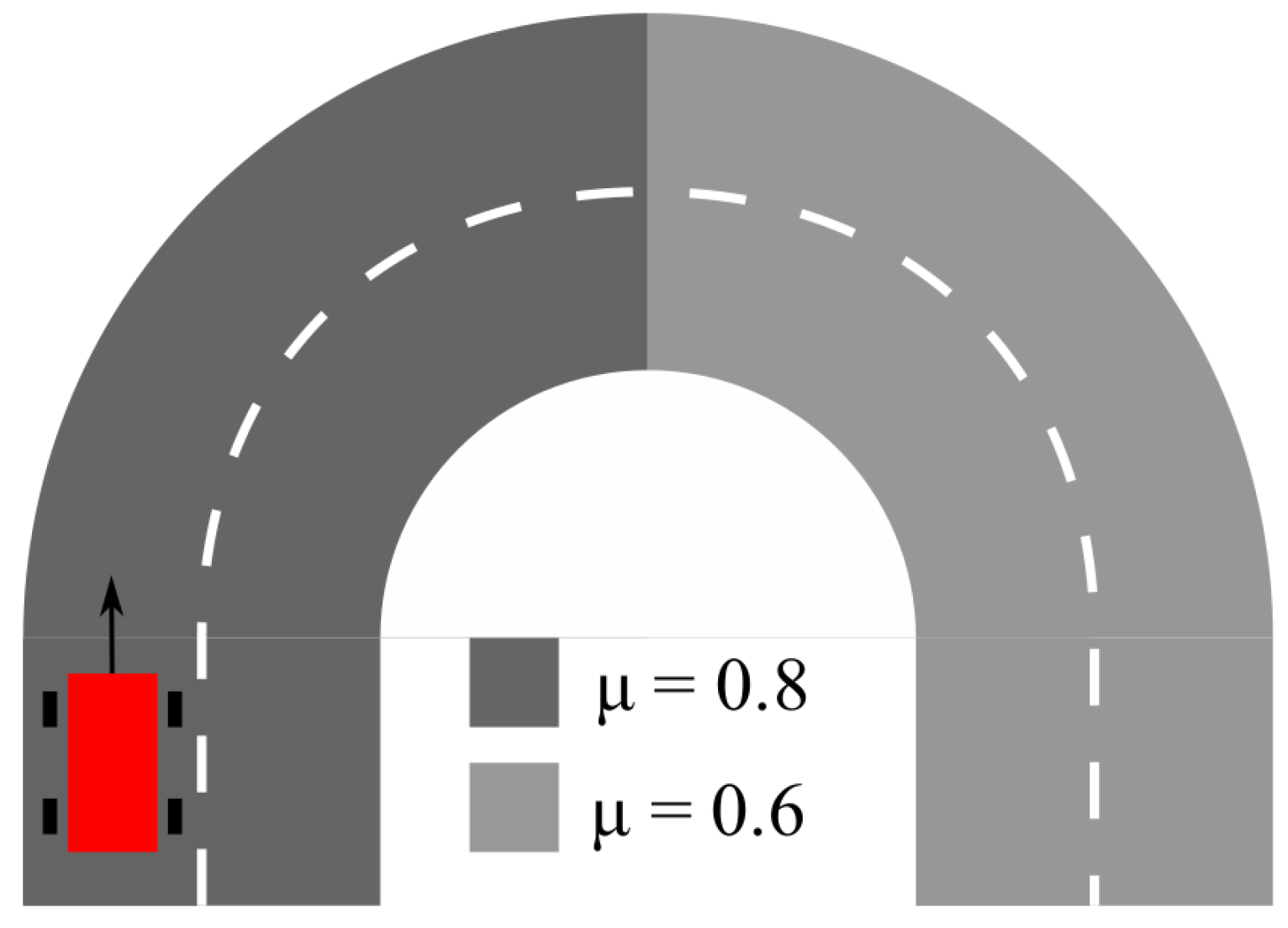
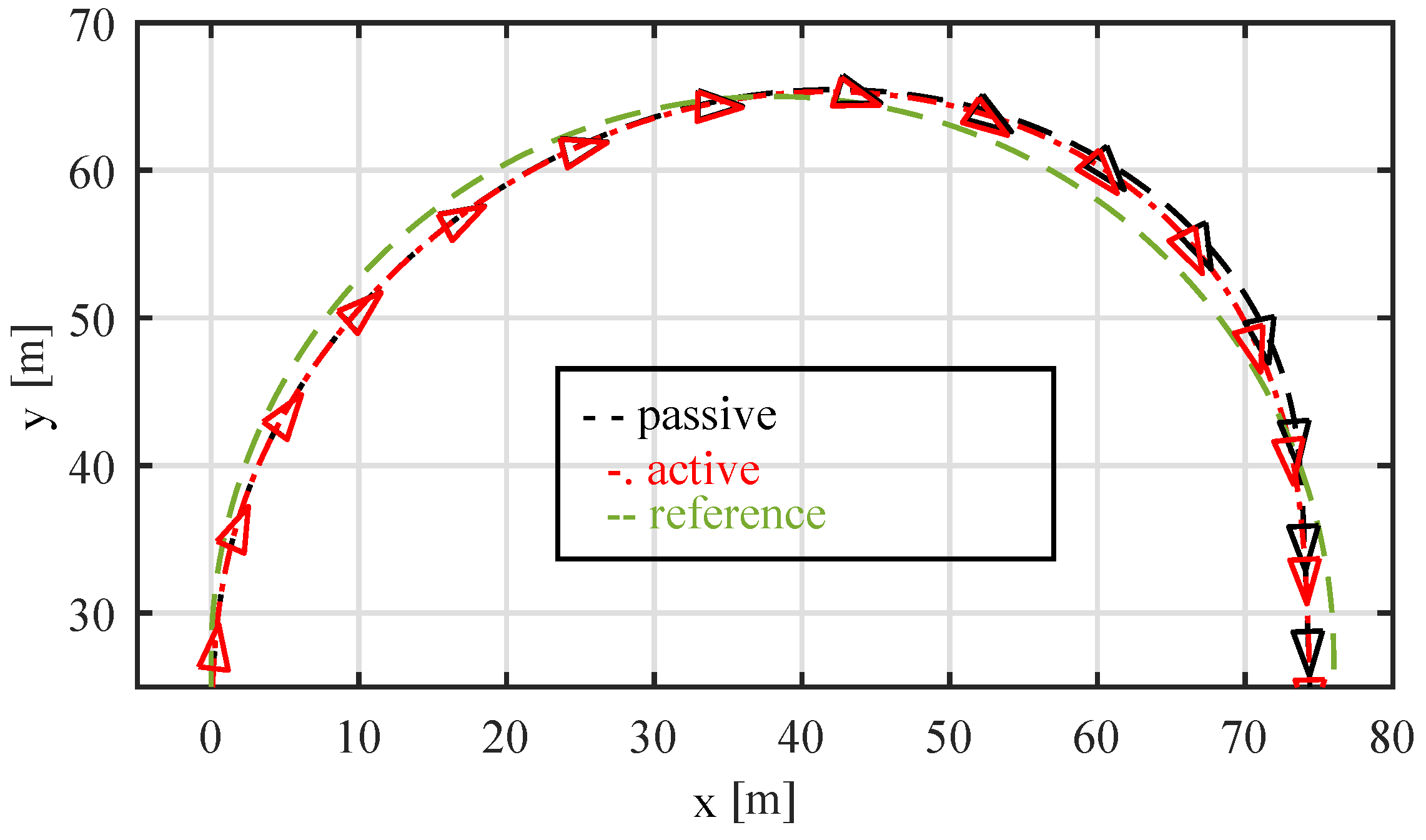
4.1. U-Turn—Highly Skilled Driver
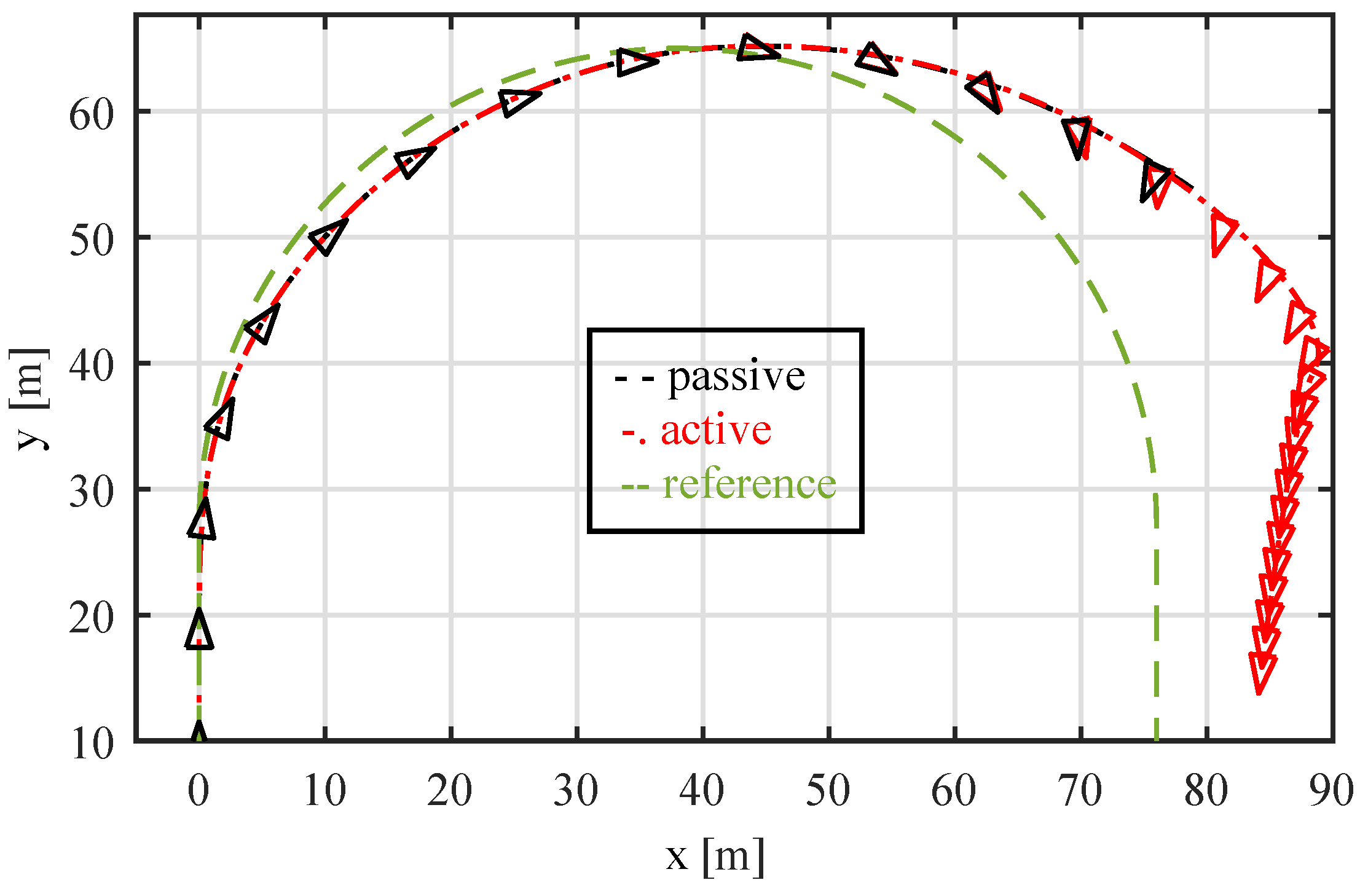
4.2. U-Turn—Low-Skilled Driver
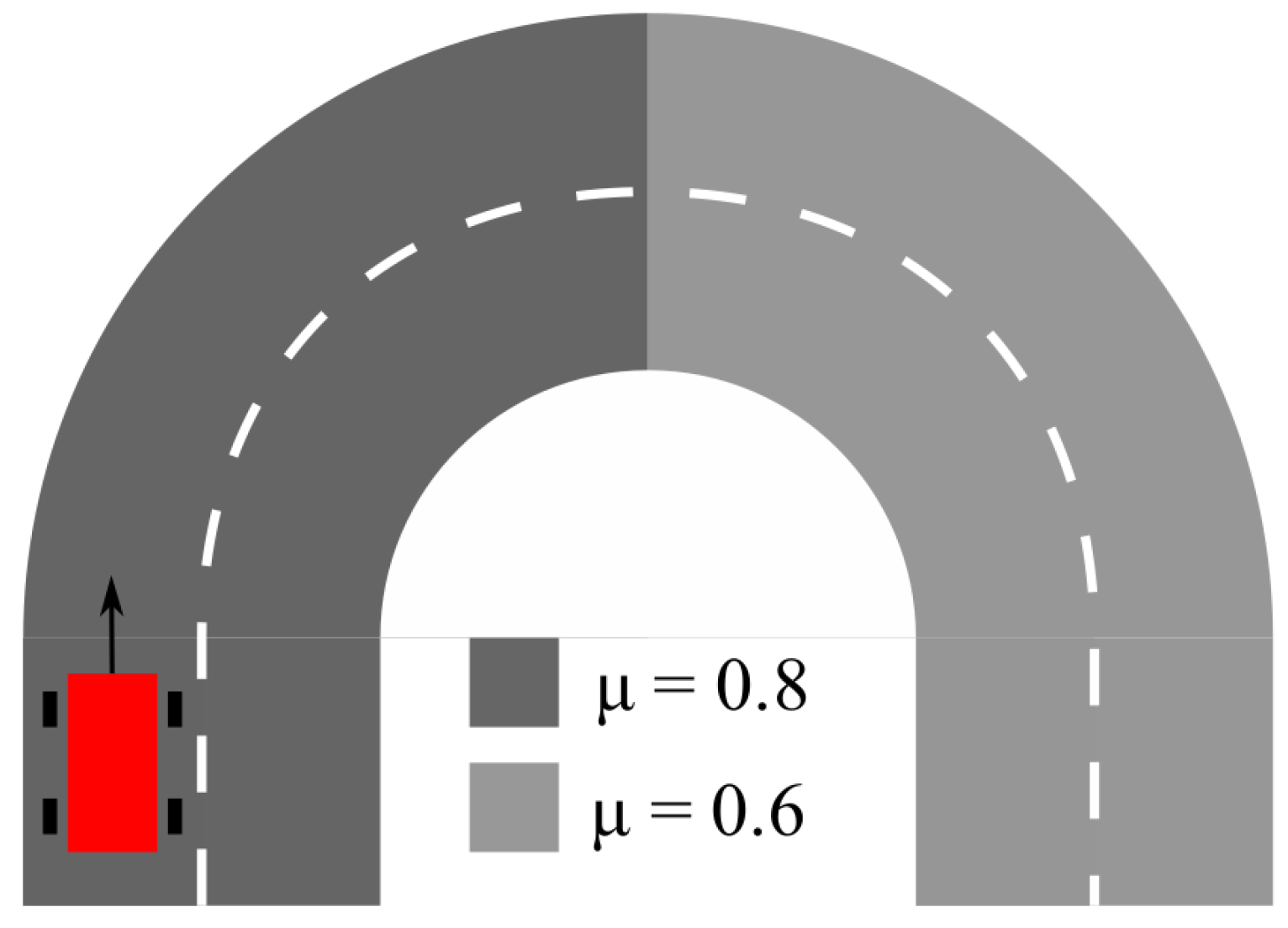
4.3. U-Turn— Jump
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ADAS | advanced driver assistance system |
| c.o.g. | center of gravity |
| dof | degree of freedom |
| EM | electric motor |
| PID | proportional integral derivative |
| SAE | Society of Automotive Engineers |
| TV | torque-vectoring |
| vehicle longitudinal acceleration | |
| vehicle lateral acceleration | |
| front axle cornering stiffness | |
| rear axle cornering stiffness | |
| longitudinal force | |
| longitudinal force of the front axle | |
| longitudinal force of the rear axle | |
| lateral force | |
| lateral force of the front axle | |
| lateral force of the rear axle | |
| J | vehicle yaw moment of inertia |
| m | vehicle mass |
| torque-vectoring yaw moment | |
| vehicle longitudinal velocity component | |
| vehicle lateral velocity component | |
| V | vehicle velocity modulus |
| slip angle | |
| slip angle of front axle | |
| slip angle of rear axle | |
| sideslip angle | |
| accelerator pedal | |
| steering angle | |
| yaw angle |
References
- Vignati, M.; Sabbioni, E.; Tarsitano, D.; Cheli, F. Electric powertrain layouts analysis for controlling vehicle lateral dynamics with torque-vectoring. In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Dizqah, A.M.; Lenzo, B.; Sorniotti, A.; Gruber, P.; Fallah, S.; De Smet, J. A Fast and Parametric Torque Distribution Strategy for Four-Wheel-Drive Energy-Efficient Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 4367–4376. [Google Scholar] [CrossRef]
- Hoffman, R.C.; Stein, J.L.; Louca, L.S.; Huh, K. Using the Milliken Moment Method and dynamic simulation to evaluate vehicle stability and controllability. Int. J. Veh. Des. 2008, 48, 132. [Google Scholar] [CrossRef]
- Edelmann, J.; Plöchl, M. Analysis of controllability of automobiles at steady-state cornering considering different drive concepts. In Dynamics of Vehicles on Roads and Tracks; CRC Press: London, UK, 2018. [Google Scholar]
- Velenis, E.; Frazzoli, E.; Tsiotras, P. Steady-state cornering equilibria and stabilisation for a vehicle during extreme operating conditions. Int. J. Veh. Auton. Syst. 2010, 8, 217–241. [Google Scholar] [CrossRef]
- Edelmann, J.; Plöchl, M. Handling characteristics and stability of the steady-state powerslide motion of an automobile. Regul. Chaotic Dyn. 2009, 14, 682–692. [Google Scholar] [CrossRef]
- Velenis, E.; Katzourakis, D.; Frazzoli, E.; Tsiotras, P.; Happee, R. Steady-state drifting stabilization of RWD vehicles. Control Eng. Pract. 2011, 19, 1363–1376. [Google Scholar] [CrossRef]
- Werling, M.; Reinisch, P.; Gröll, L. Robust power-slide control for a production vehicle. Int. J. Veh. Auton. Syst. 2015, 13, 27. [Google Scholar] [CrossRef]
- Nakano, H.; Okayama, K.; Kinugawa, J.; Kosuge, K. Control of an electric vehicle with a large sideslip angle using driving forces of four independently-driven wheels and steer angle of front wheels. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, 8–11 July 2014; pp. 1073–1078. [Google Scholar] [CrossRef]
- Best, M.C. Exploring Assumptions and Requirements for Continuous Modification of Vehicle Handling Using Nonlinear Optimal Control and a New Exponential Tyre Model; Loughborough University: Loughborough, UK, 2010; pp. 79–84. [Google Scholar]
- Hindiyeh, R.Y.; Gerdes, J.C. Design of a Dynamic Surface Controller for Vehicle Sideslip Angle During Autonomous Drifting. IFAC Proc. Vol. 2010, 43, 560–565. [Google Scholar] [CrossRef]
- Bobier-Tiu, C.G.; Beal, C.E.; Kegelman, J.C.; Hindiyeh, R.Y.; Gerdes, J.C. Vehicle control synthesis using phase portraits of planar dynamics. Veh. Syst. Dyn. 2018, 3114, 1–20. [Google Scholar] [CrossRef]
- Hindiyeh, R.Y.; Gerdes, J.C. Equilibrium Analysis of Drifting Vehicles for Control Design. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference, Hollywood, CA, USA, 12–14 October 2009; Volume 1, pp. 181–188. [Google Scholar] [CrossRef]
- Rossa, F.; Gobbi, M.; Mastinu, G.; Piccardi, C.; Previati, G. Bifurcation analysis of a car and driver model. Veh. Syst. Dyn. 2014, 52, 142–156. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering, 5th ed.; Pearson: London, UK, 2010; p. 912. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| vehicle mass | kg | 295 |
| yaw moment of inertia | 90 | |
| wheelbase | 1670 | |
| center of gravity (c.o.g.) to front axle distance | 749 | |
| c.o.g. to rear axle distance | 926 | |
| front track width | 1276 | |
| rear track width | 1276 | |
| c.o.g. height | 260 |
| Straight Driving | Typical Cornering | Drift Cornering | |
|---|---|---|---|
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vignati, M.; Sabbioni, E.; Cheli, F. A Torque Vectoring Control for Enhancing Vehicle Performance in Drifting. Electronics 2018, 7, 394. https://doi.org/10.3390/electronics7120394
Vignati M, Sabbioni E, Cheli F. A Torque Vectoring Control for Enhancing Vehicle Performance in Drifting. Electronics. 2018; 7(12):394. https://doi.org/10.3390/electronics7120394
Chicago/Turabian StyleVignati, Michele, Edoardo Sabbioni, and Federico Cheli. 2018. "A Torque Vectoring Control for Enhancing Vehicle Performance in Drifting" Electronics 7, no. 12: 394. https://doi.org/10.3390/electronics7120394
APA StyleVignati, M., Sabbioni, E., & Cheli, F. (2018). A Torque Vectoring Control for Enhancing Vehicle Performance in Drifting. Electronics, 7(12), 394. https://doi.org/10.3390/electronics7120394