Comparison of Different Repetitive Control Architectures: Synthesis and Comparison. Application to VSI Converters



Abstract
1. Introduction
2. Repetitive Control Basics and Architectures
2.1. Periodical Signal Generator
2.2. Series Approach
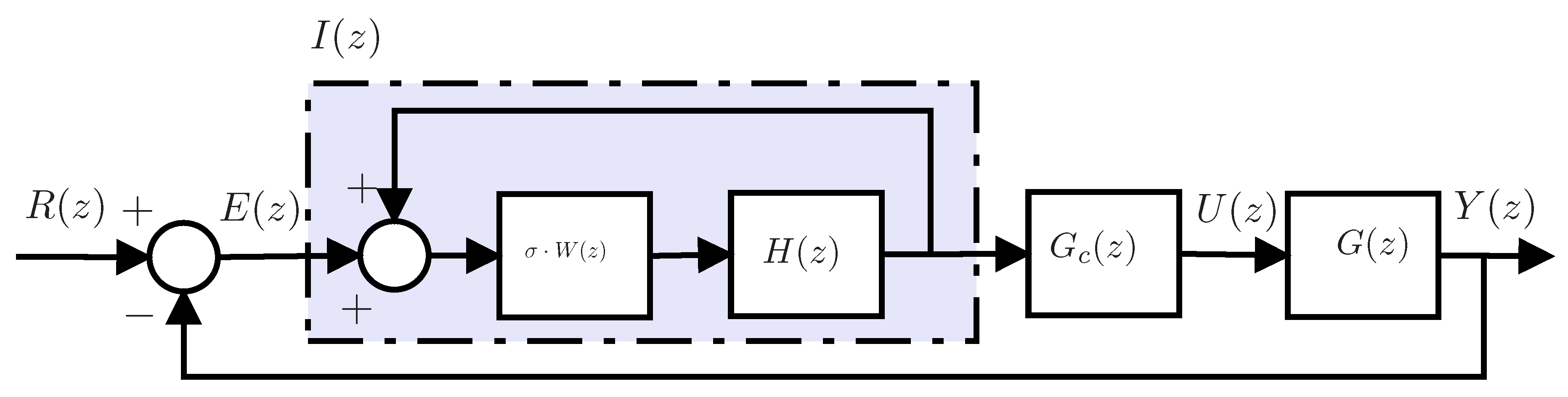
2.3. Plug-in Approach
- must be stable ( can be designed to fulfill it)
- ( can be selected appropriately)
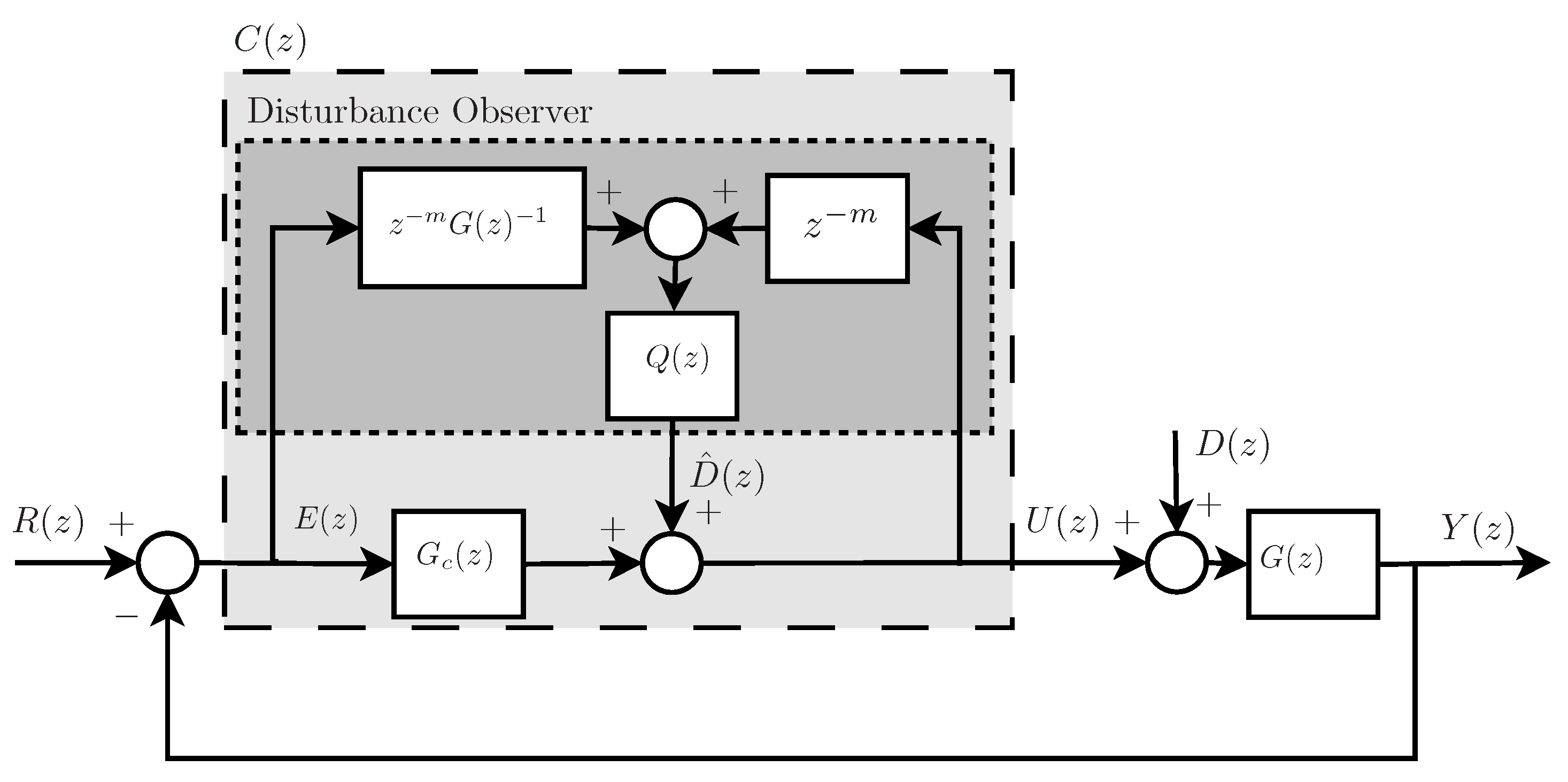
2.4. Disturbance Rejection Approach
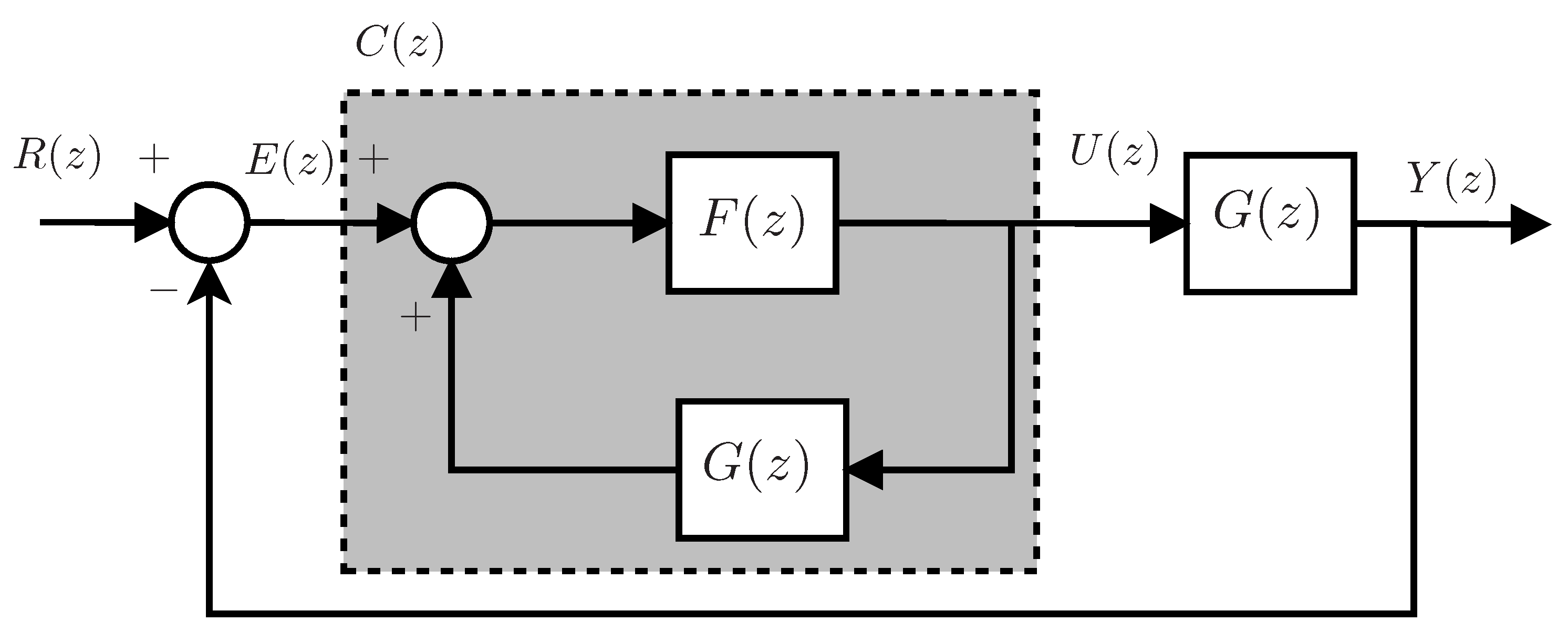
2.5. Repetitive Control Using the Stabilizing Controllers’ Parametrization
2.6. Scheme
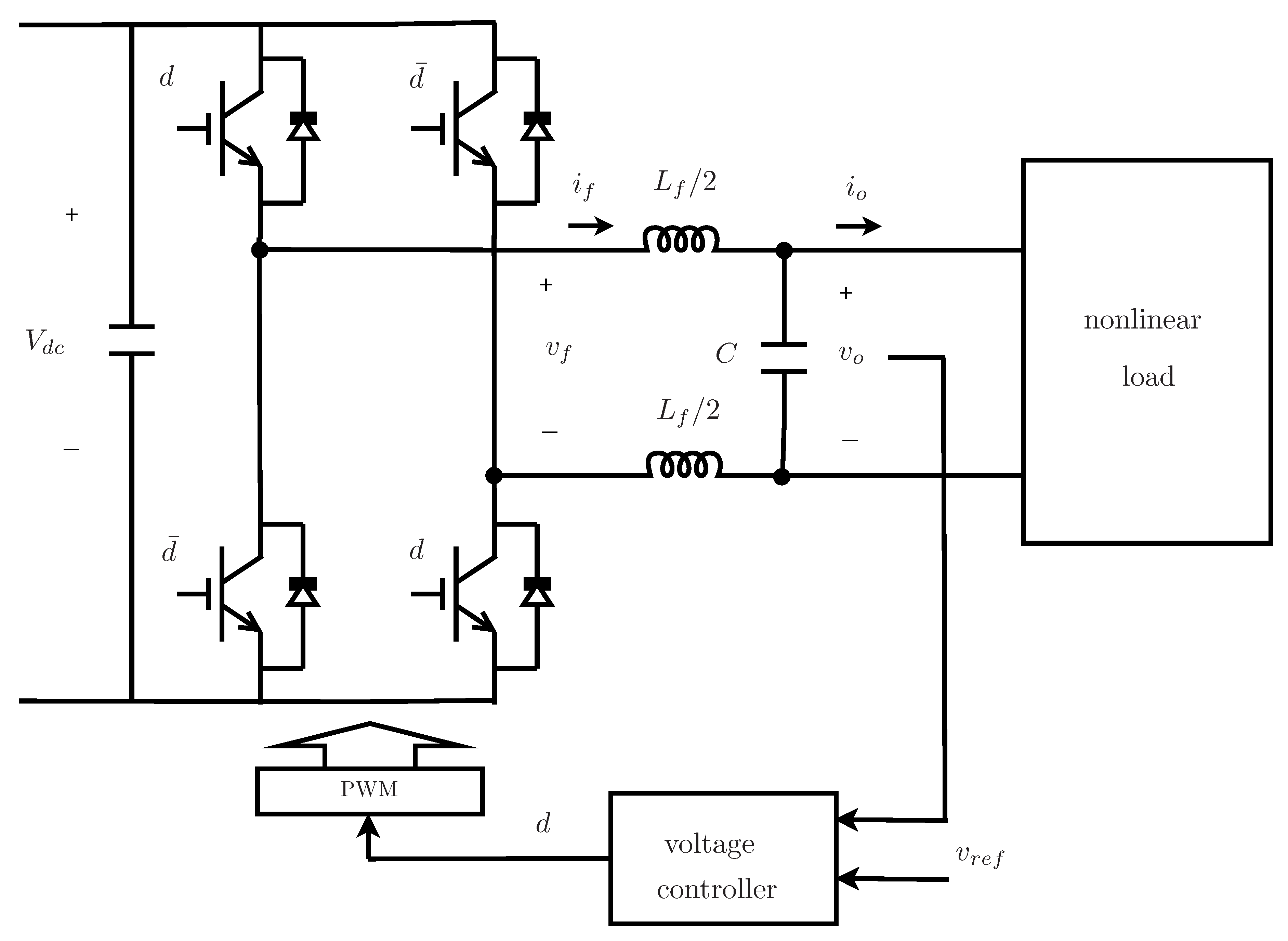
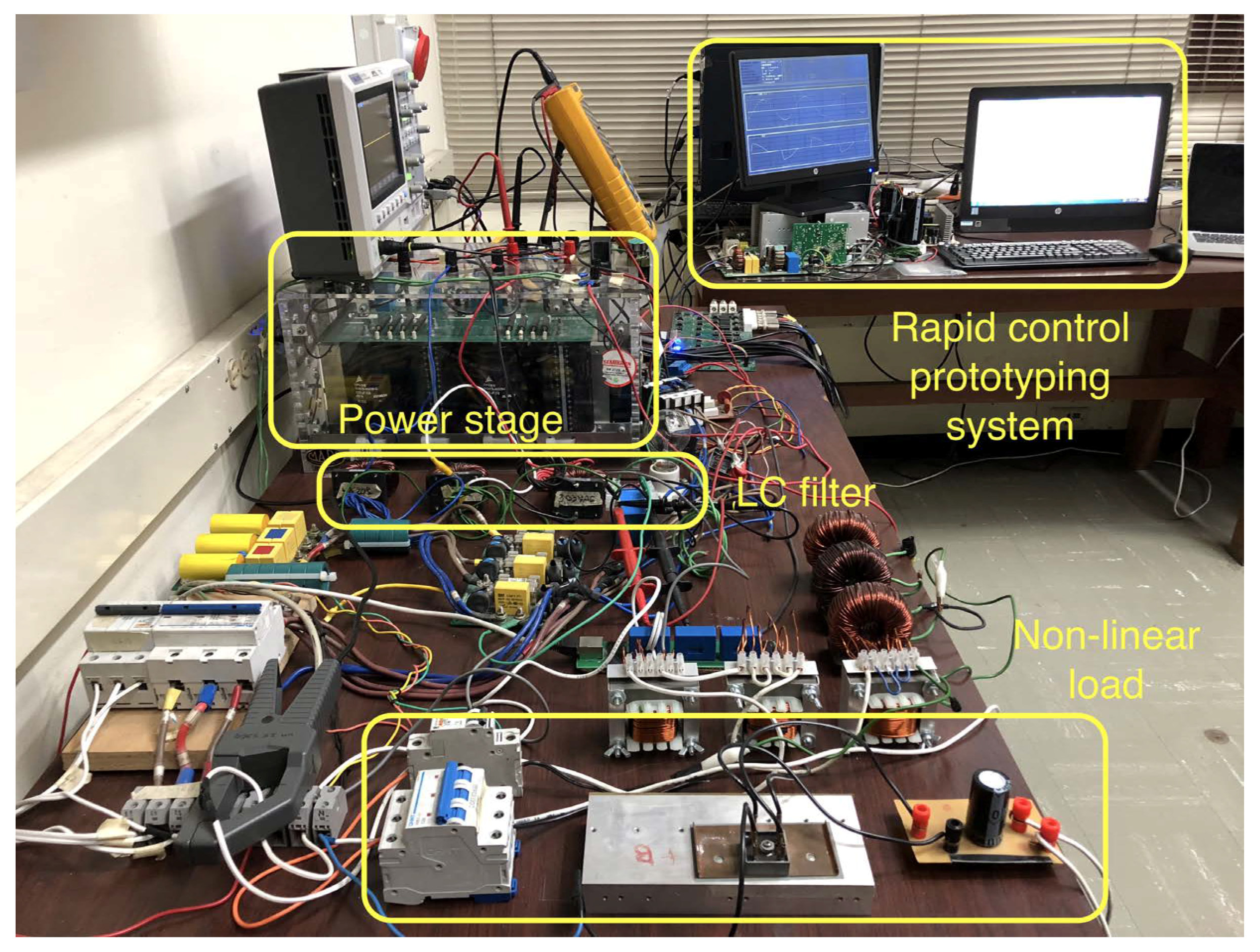
3. Repetitive Control Design for the Voltage Source Inverter
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Y.; Gao, F.; Doyle, F.J. Survey on iterative learning control, repetitive control, and run-to-run control. J. Process Control 2009, 19, 1589–1600. [Google Scholar] [CrossRef]
- Longman, R.W. Iterative learning control and repetitive control for engineering practice. Int. J. Control 2010, 73, 930–954. [Google Scholar] [CrossRef]
- Chen, Y.; Moore, K.L.; Yu, J.; Zhang, T. Iterative learning control and repetitive control in hard disk drive industry—A tutorial. Int. J. Adapt. Control Signal Process. 2008, 22, 325–343. [Google Scholar] [CrossRef]
- Ahn, H.S.; Chen, Y.Q.; Moore, K.L. Iterative Learning Control: Brief Survey and Categorization. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1099–1121. [Google Scholar] [CrossRef]
- Álvarez, J.D.; Costa-Castelló, R.; Castilla, M.d.M. Repetitive Control to Improve Users’ Thermal Comfort and Energy Efficiency in Buildings. Energies 2018, 11, 976. [Google Scholar] [CrossRef]
- Francis, B.; Wonham, W. The internal model principle of control theory. Automatica 1976, 12, 457–465. [Google Scholar] [CrossRef]
- Costa-Castelló, R.; Olm, J.M.; Vargas, H.; Ramos, G.A. An Educational Approach To The Internal Model Principle For Periodic Signals. Int. J. Innov. Comput. Inf. Control 2012, 8, 5591–5606. [Google Scholar]
- Ramos, G.; Costa-Castelló, R.; Olm, J.M. Digital Repetitive Control under Varying Frequency Conditions; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2013; Volume 446, ISBN 978-3-642-37778-5. [Google Scholar]
- Park, S.W.; Jeong, J.; Yang, H.S.; Park, Y.P.; Park, N.C. Repetitive controller design for minimum track misregistration in hard disk drives. IEEE Trans. Magn. 2005, 41, 2522–2528. [Google Scholar] [CrossRef]
- Inoue, T.; Nakano, M.; Kubo, T.; Matsumoto, S.; Baba, H. High Accuracy control of a proton syncrotron magnet powe supply. In Proceedings of the 8th Triennial World Congress of the International Federation of Automatic Control; IFAC by Pergamon Press: Tarrytown, NY, USA, 1982; pp. 3137–3142. [Google Scholar]
- Ramos, G.A.; Costa-Castelló, R. Optimal anti-windup synthesis for repetitive controllers. J. Process Control 2013, 23, 1149–1158. [Google Scholar] [CrossRef]
- Wang, L. Tutorial review on repetitive control with anti-windup mechanisms. Annu. Rev. Control 2016, 42, 332–345. [Google Scholar] [CrossRef]
- Chen, X.; Tomizuka, M. New Repetitive Control With Improved Steady-State Performance and Accelerated Transient. IEEE Trans. Control Syst. Technol. 2014, 22, 664–675. [Google Scholar] [CrossRef]
- Chen, X.; Tomizuka, M. Overview and new results in disturbance observer based adaptive vibration rejection with application to advanced manufacturing. Int. J. Adapt. Control Signal Process. 2015, 29, 1459–1474. [Google Scholar] [CrossRef]
- Wu, M.; Xu, B.; Cao, W.; She, J. Aperiodic Disturbance Rejection in Repetitive-Control Systems. IEEE Trans. Control Syst. Technol. 2014, 22, 1044–1051. [Google Scholar]
- Zhou, L.; She, J.; Wu, M.; He, Y. Design of a robust observer-based modified repetitive-control system. ISA Trans. 2013, 52, 375–382. [Google Scholar] [CrossRef] [PubMed]
- Wu, M.; Zhou, L.; She, J. Design of Observer-Based H∞ Robust Repetitive-Control System. IEEE Trans. Autom. Control 2011, 56, 1452–1457. [Google Scholar] [CrossRef]
- Albalawi, H.; Zaid, S.A. An H5 Transformerless Inverter for Grid Connected PV Systems with Improved Utilization Factor and a Simple Maximum Power Point Algorithm. Energies 2018, 11, 2912. [Google Scholar] [CrossRef]
- Rubio, F.R.; Navas, S.J.; Ollero, P.; Lemos, J.M.; Ortega, M.G. Control Óptimo Aplicado a Campos de Colectores Solares Distribuidos. Rev. Iberoam. Autom. Inf. Ind. 2018, 15, 327–338. [Google Scholar] [CrossRef]
- Griñó, R.; Costa-Castelló, R. Digital repetitive plug-in controller for odd-harmonic periodic references and disturbances. Automatica 2005, 41, 153–157. [Google Scholar] [CrossRef]
- Steinbuch, M.; Weiland, S.; Singh, T. Design of Noise and Period-Time Robust High Order Repetitive Control, with application to optical storage. Automatica 2007, 43, 2086–2095. [Google Scholar] [CrossRef]
- Ramos, G.A.; Costa-Castelló, R. Power factor correction and harmonic compensation using second-order odd-harmonic repetitive control. IET Control Theory Appl. 2012, 6, 1–12. [Google Scholar] [CrossRef]
- Escobar, G.; Hernandez-Briones, P.; Torres-Olguin, R.; Valdez, A. A repetitive-based controller for the compensation of 6l ± 1 harmonic components. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 3397–3402. [Google Scholar]
- Escobar, G.; Mattavelli, P.; Hernandez-Gomez, M.; Martinez-Rodriguez, P.R. Filters With Linear-Phase Properties for Repetitive Feedback. IEEE Trans. Ind. Electron. 2014, 61, 405–413. [Google Scholar] [CrossRef]
- Ye, Y.; Tayebi, A.; Liu, X. All-pass filtering in iterative learning control. Automatica 2009, 45, 257–264. [Google Scholar] [CrossRef]
- Tomizuka, M. Zero Phase Error Tracking Algorithm for Digital Control. J. Dyn. Syst. Meas. Control 1987, 109, 65–68. [Google Scholar] [CrossRef]
- Sánchez-Peña, R.S.; Sznaier, M. Robust Systems Theory and Applications; Adaptive and Learning Systems for Signal Processing, Communications and Control Series; Wiley-Interscience: Hoboken, NJ, USA, 1998. [Google Scholar]
- Songschon, S.; Longman, R.W. Comparison of the stability boundary and the frequency response stability condition in learning and repetitive control. Int. J. Appl. Math. Comput. Sci. 2003, 13, 169–177. [Google Scholar]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods: An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Chen, X.; Tomizuka, M. An enhanced repetitive control algorithm using the structure of disturbance observer. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kaohsiung, Taiwan, 11–14 July 2012; pp. 490–495. [Google Scholar]
- Tang, M.; Formentini, A.; Odhano, S.; Zanchetta, P. Design of a repetitive controller as a feed-forward disturbance observer. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 78–83. [Google Scholar]
- Weiss, G.; Häfele, M. Repetitive control of MIMO systems using Hinfty design. Automatica 1999, 35, 1185–1199. [Google Scholar] [CrossRef]
- Hornik, T.; Zhong, Q.C. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on Hinfty and Repetitive Control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Wang, X. A three-step design method for performance improvement of robust repetitive control. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 2, pp. 1220–1225. [Google Scholar]
- Hornik, T.; Zhong, Q.C. H∞ repetitive voltage control of gridconnected inverters with a frequency adaptive mechanism. IET Power Electron. 2010, 3, 925–935. [Google Scholar] [CrossRef]
- Deng, H.; Oruganti, R.; Srinivasan, D. Analysis and Design of Iterative Learning Control Strategies for UPS Inverters. IEEE Trans. Ind. Electron. 2007, 54, 1739–1751. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, K.; Lu, W. Robust repetitive control scheme for three-phase constant-voltage-constant-frequency pulse-widthmodulated inverters. IET Power Electron. 2012, 5, 669–677. [Google Scholar] [CrossRef]
- Yeol, J.W.; Longman, R.W.; Ryu, Y.S. On the Settling Time in Repetitive Control Systems. IFAC Proc. Vol. 2008, 41, 12460–12467. [Google Scholar] [CrossRef]
- Garimella, S.; Srinivasan, K. Transient response of repetitive control systems. In Proceedings of the American Control Conference, Baltimore, MD, USA, 29 June–1 July 1994; pp. 2909–2913. [Google Scholar]
- Ramos, G.A.; Costa-Castelló, R.; Olm, J.M. Analysis and design of a robust odd-harmonic repetitive controller for an active filter under variable network frequency. Control Eng. Pract. 2012, 20, 895–903. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonics | RC | HORC |
|---|---|---|
| Full | ||
| Odd | ||
| [23] | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos, G.A.; Costa-Castelló, R. Comparison of Different Repetitive Control Architectures: Synthesis and Comparison. Application to VSI Converters. Electronics 2018, 7, 446. https://doi.org/10.3390/electronics7120446
Ramos GA, Costa-Castelló R. Comparison of Different Repetitive Control Architectures: Synthesis and Comparison. Application to VSI Converters. Electronics. 2018; 7(12):446. https://doi.org/10.3390/electronics7120446
Chicago/Turabian StyleRamos, Germán A., and Ramon Costa-Castelló. 2018. "Comparison of Different Repetitive Control Architectures: Synthesis and Comparison. Application to VSI Converters" Electronics 7, no. 12: 446. https://doi.org/10.3390/electronics7120446
APA StyleRamos, G. A., & Costa-Castelló, R. (2018). Comparison of Different Repetitive Control Architectures: Synthesis and Comparison. Application to VSI Converters. Electronics, 7(12), 446. https://doi.org/10.3390/electronics7120446