Harmonic Extended State Observer Based Anti-Swing Attitude Control for Quadrotor with Slung Load


Abstract
:1. Introduction
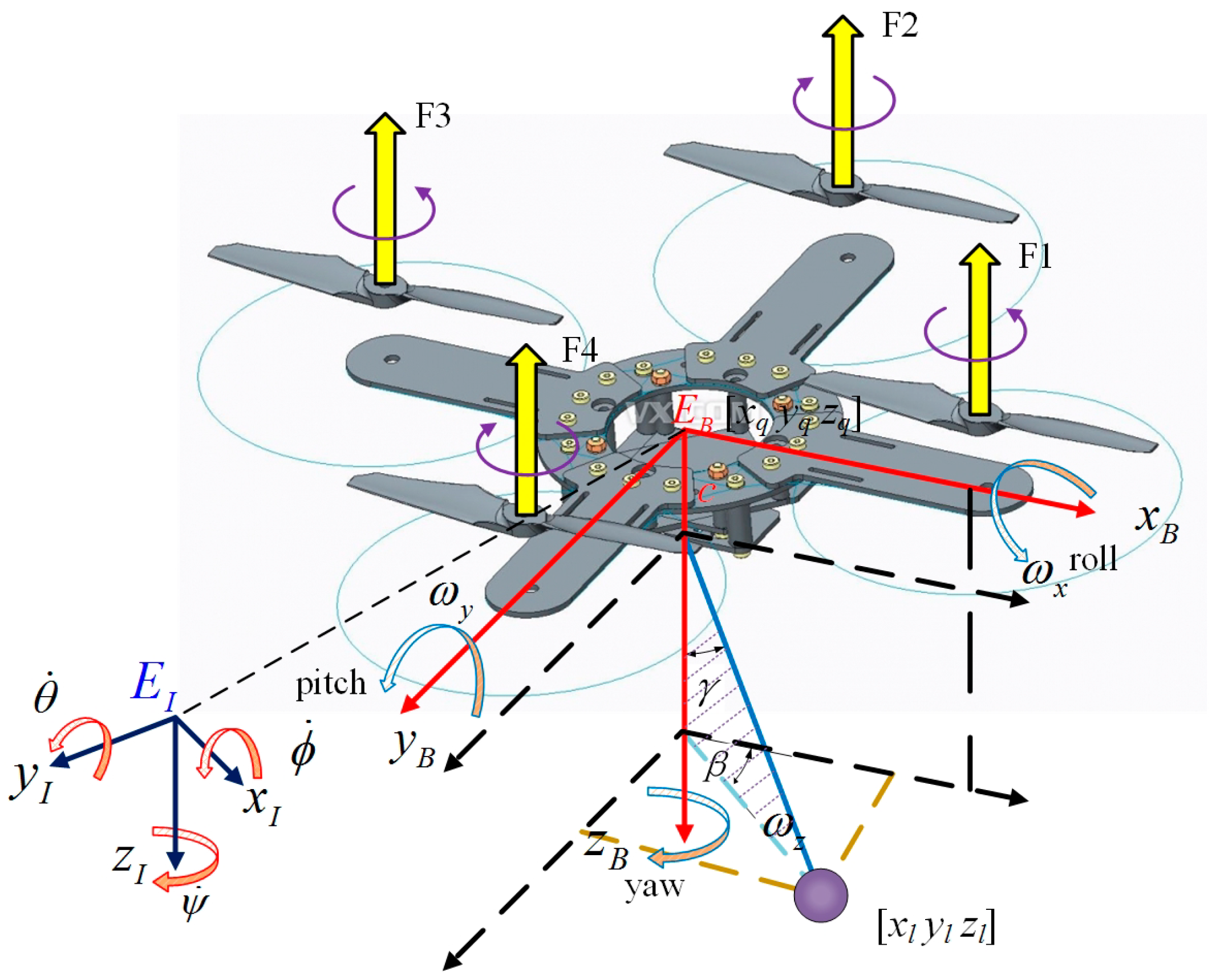
2. Mathematical Model and Problem Formulation
2.1. Preliminaries
2.1.1. Notations and Assumptions
- (1)
- The slung load is considered as a particle and only swings in a plane. The length of the connecting cable is constant and known.
- (2)
- The inelastic cable is massless and always tight and no consideration of the energy loss caused by the friction force in the swing.
- (3)
- The aerodynamic effects on the load are neglected.
2.1.2. Quaternion Operations
2.2. Mathmetical Model of Quadrotor-Slung Load system
2.3. Analysis of Slung Load Motion
2.4. Problem Formulation
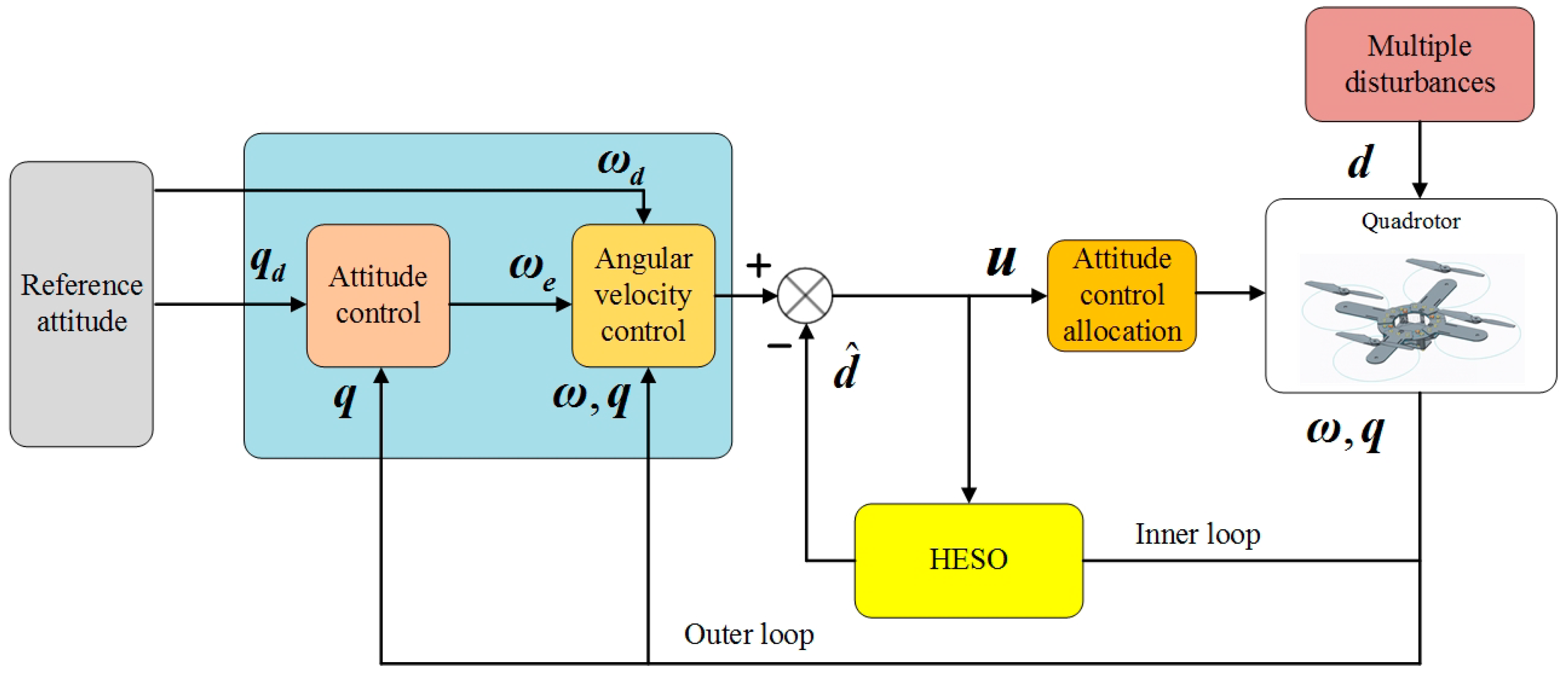
3. Design and Stability Analysis of HESO
3.1. Design of HESO
3.2. Convergency Analysis of HESO
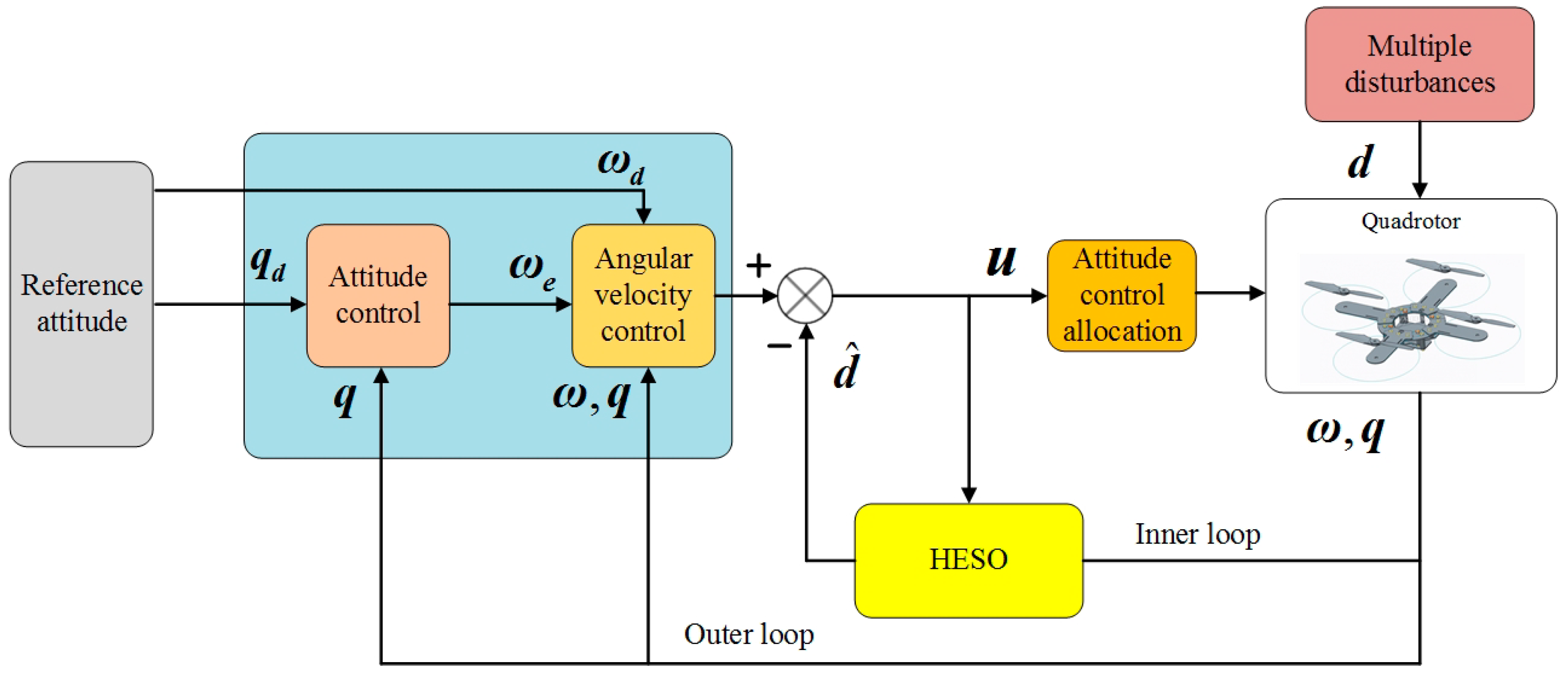
4. Design of Attitude Controller
5. Simulation and Experimental Results
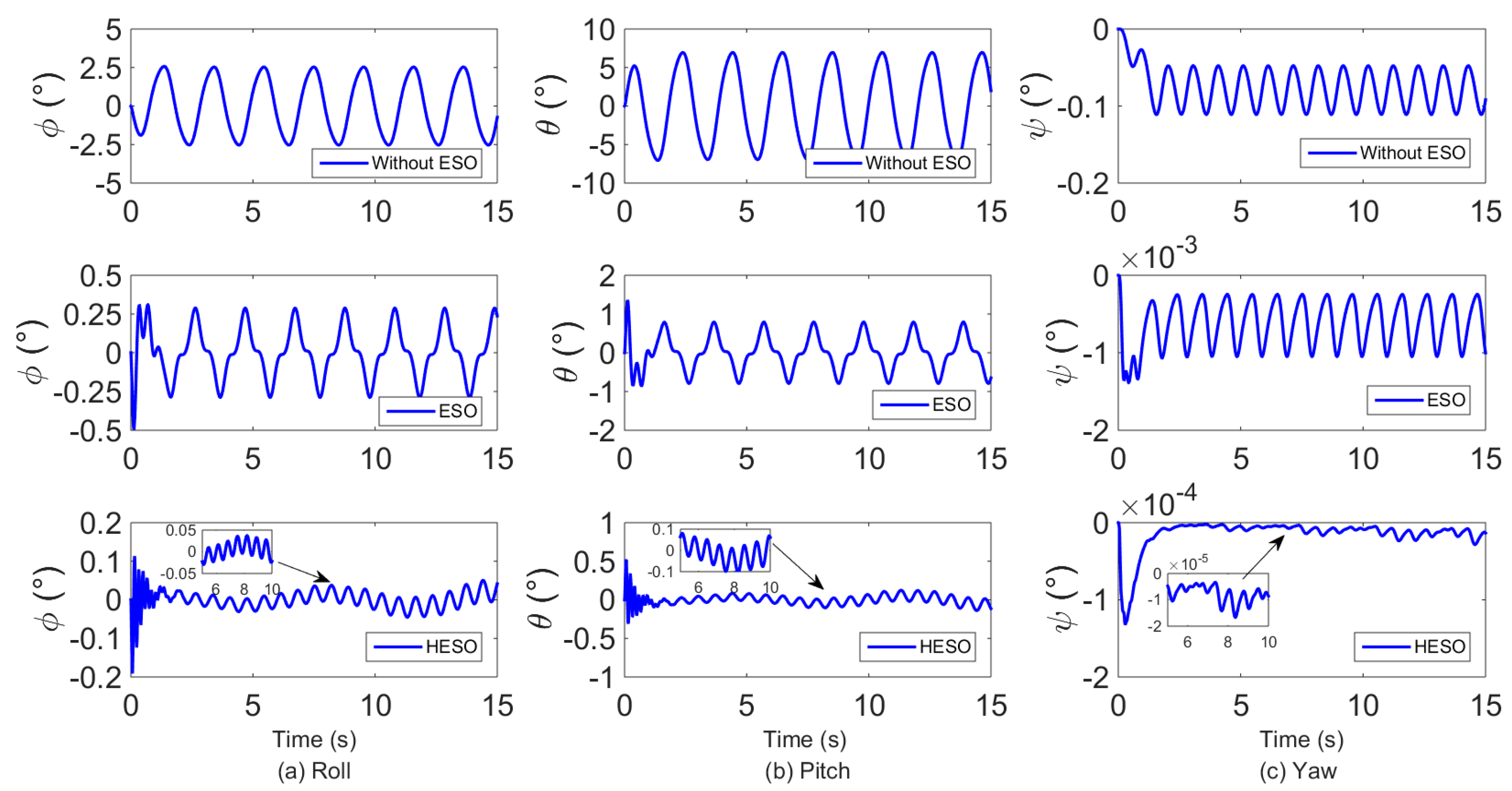
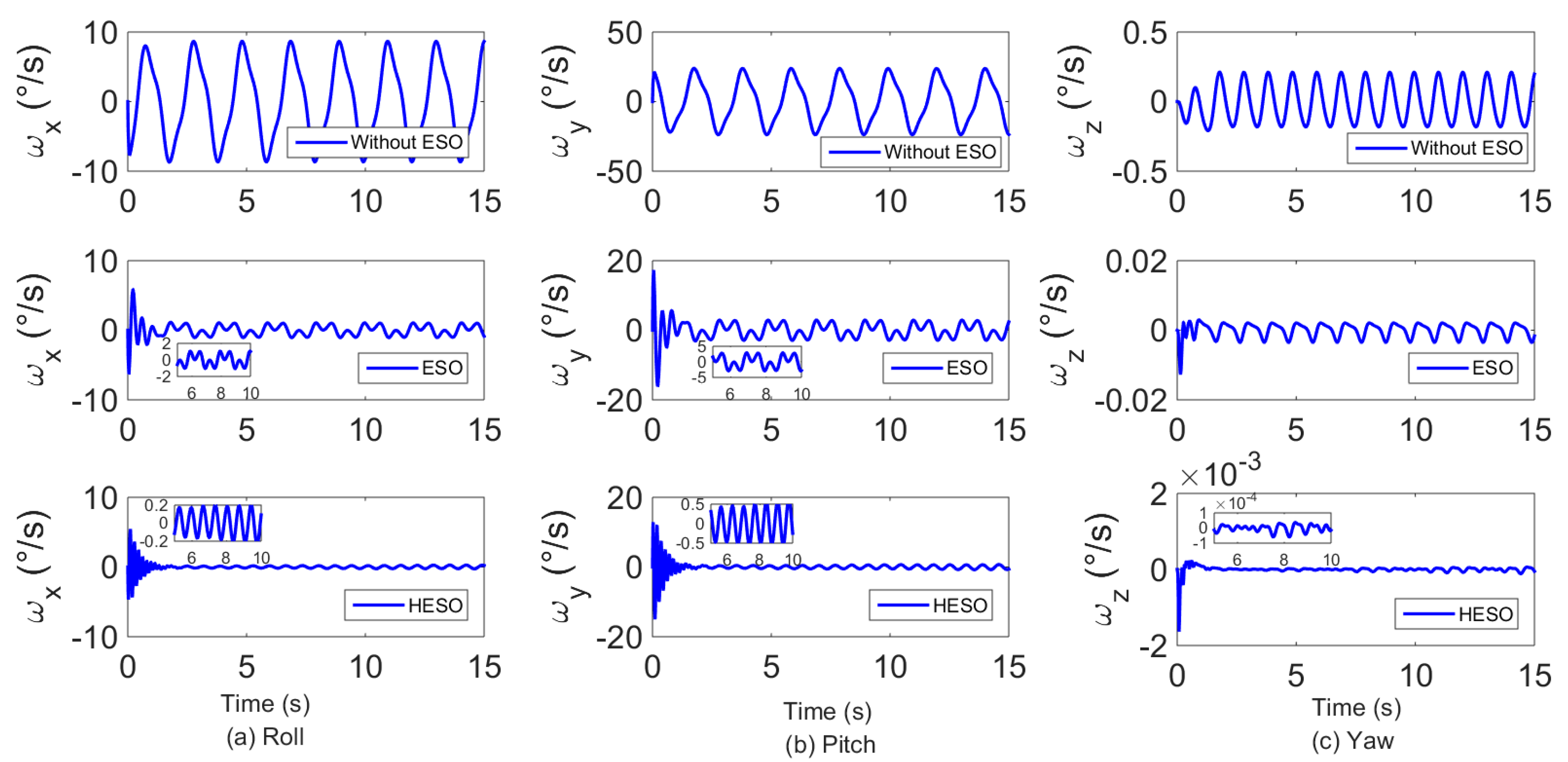
5.1. Simulation Results
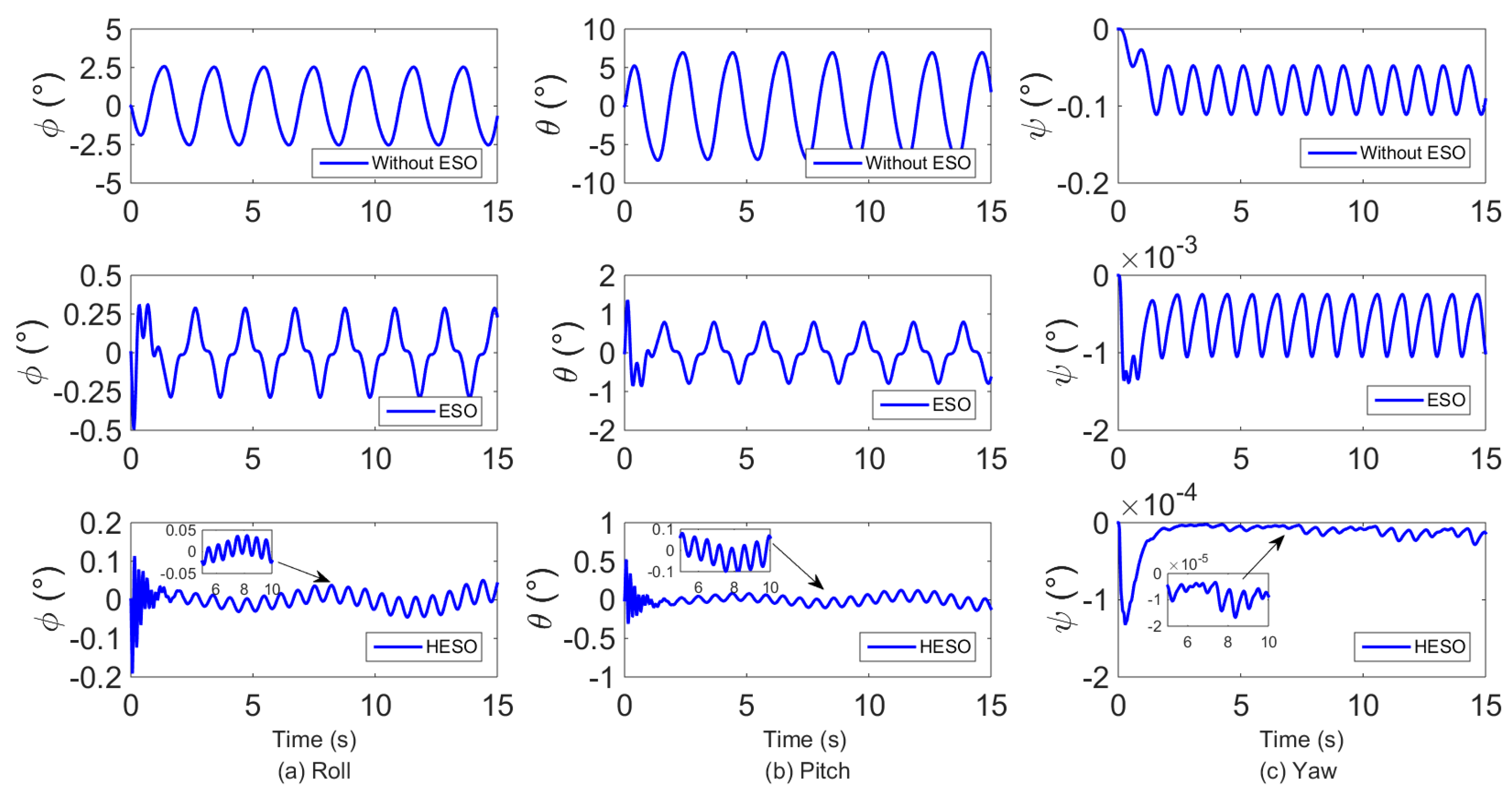
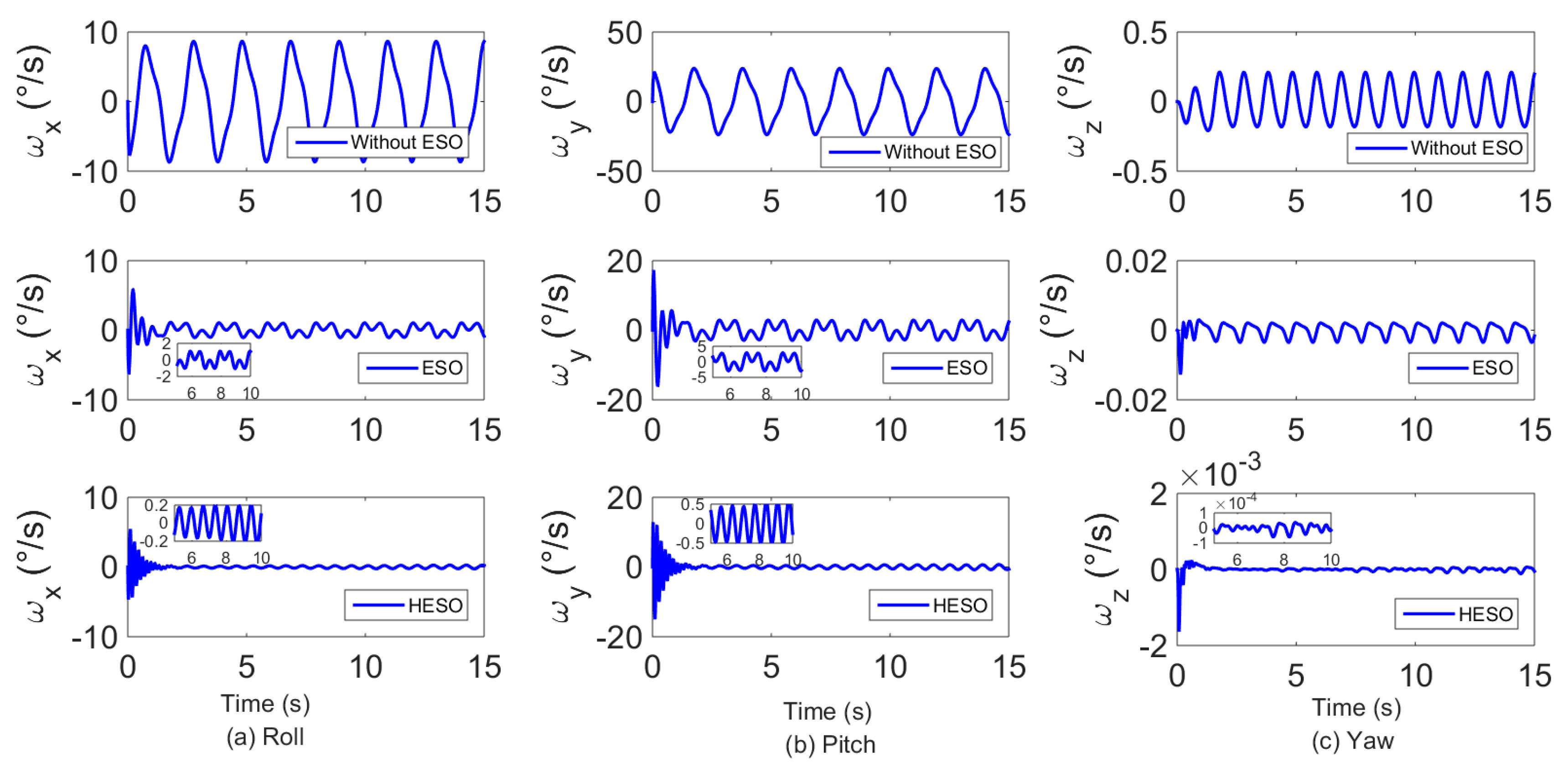
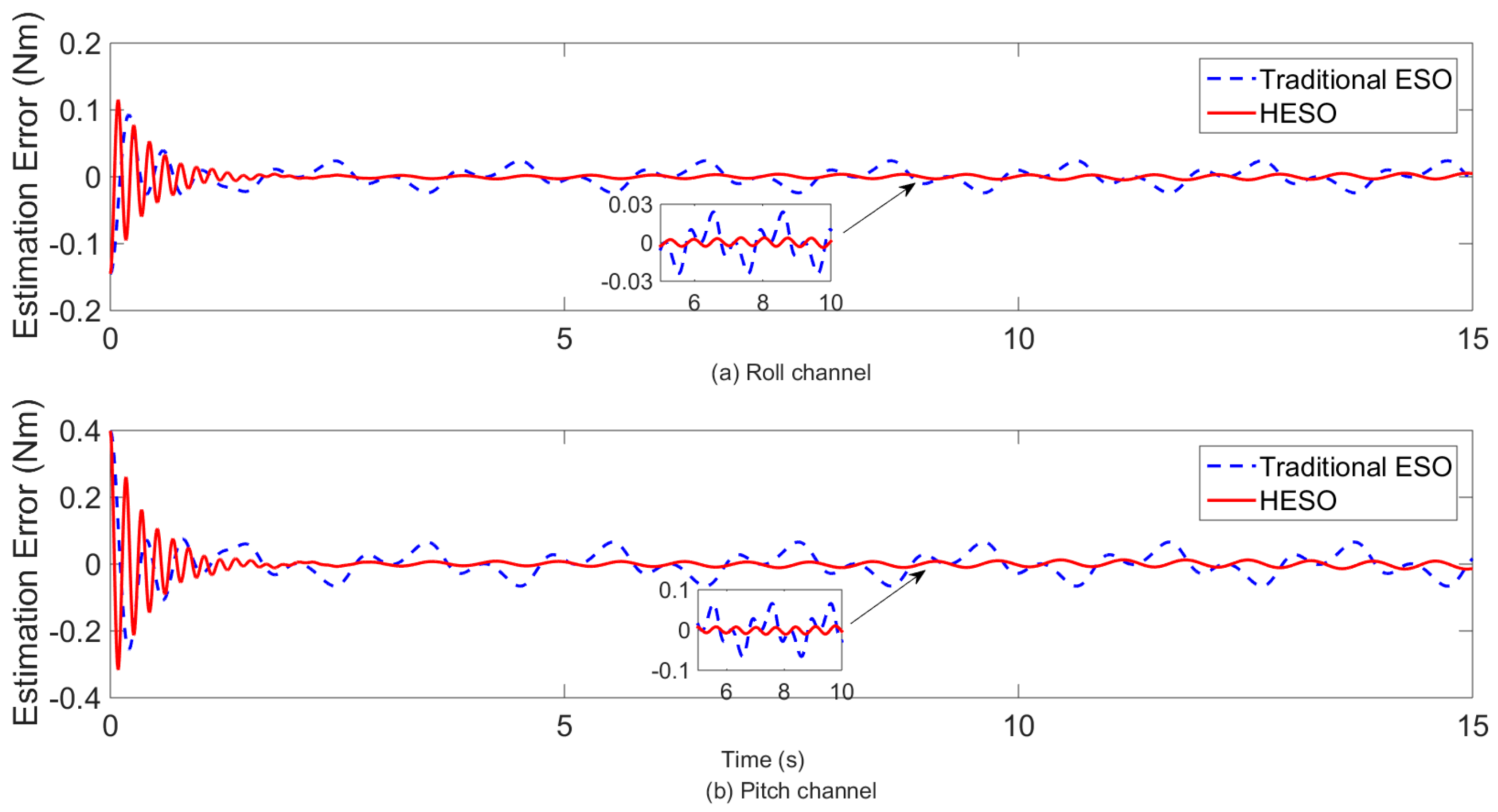
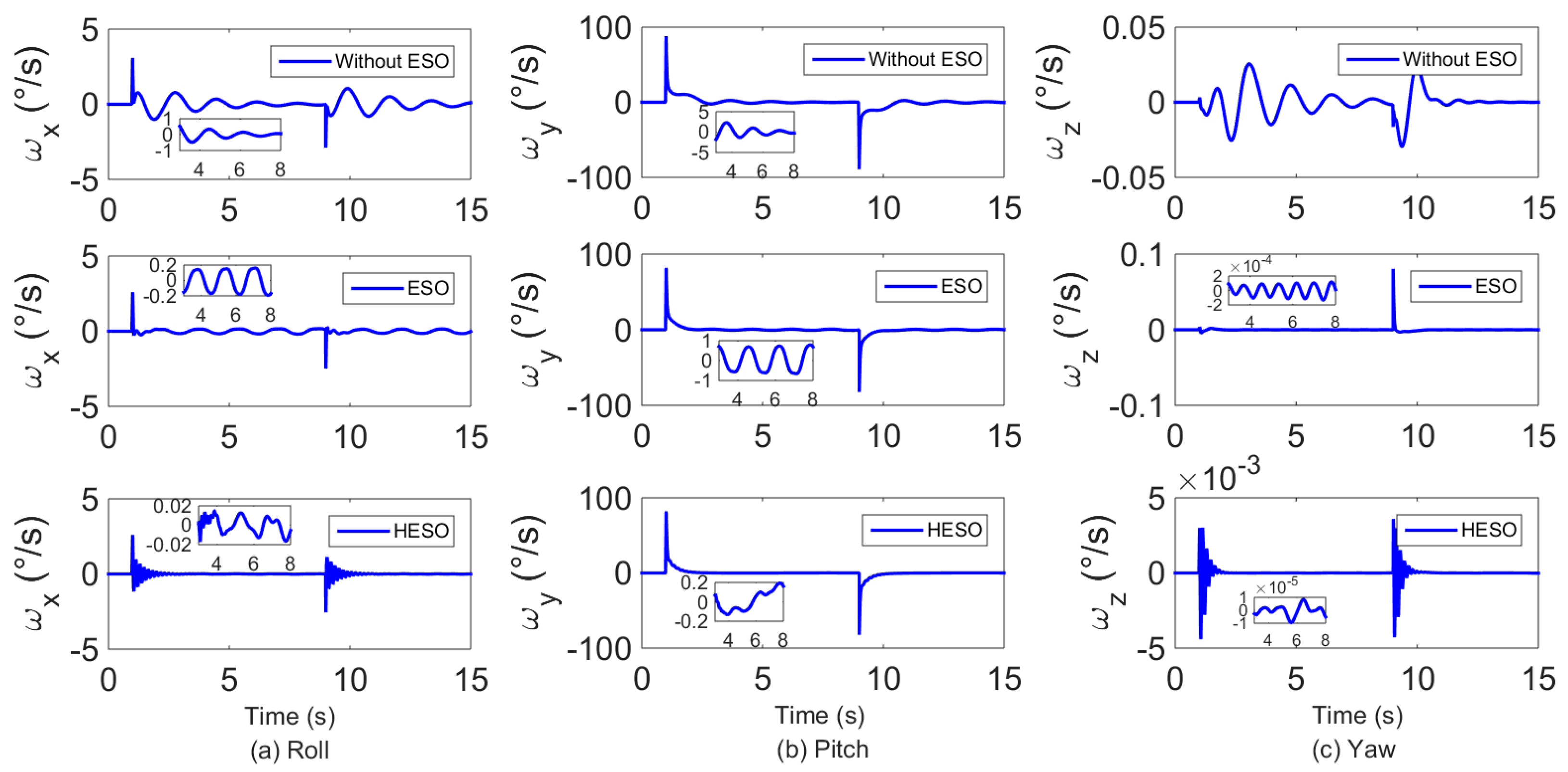
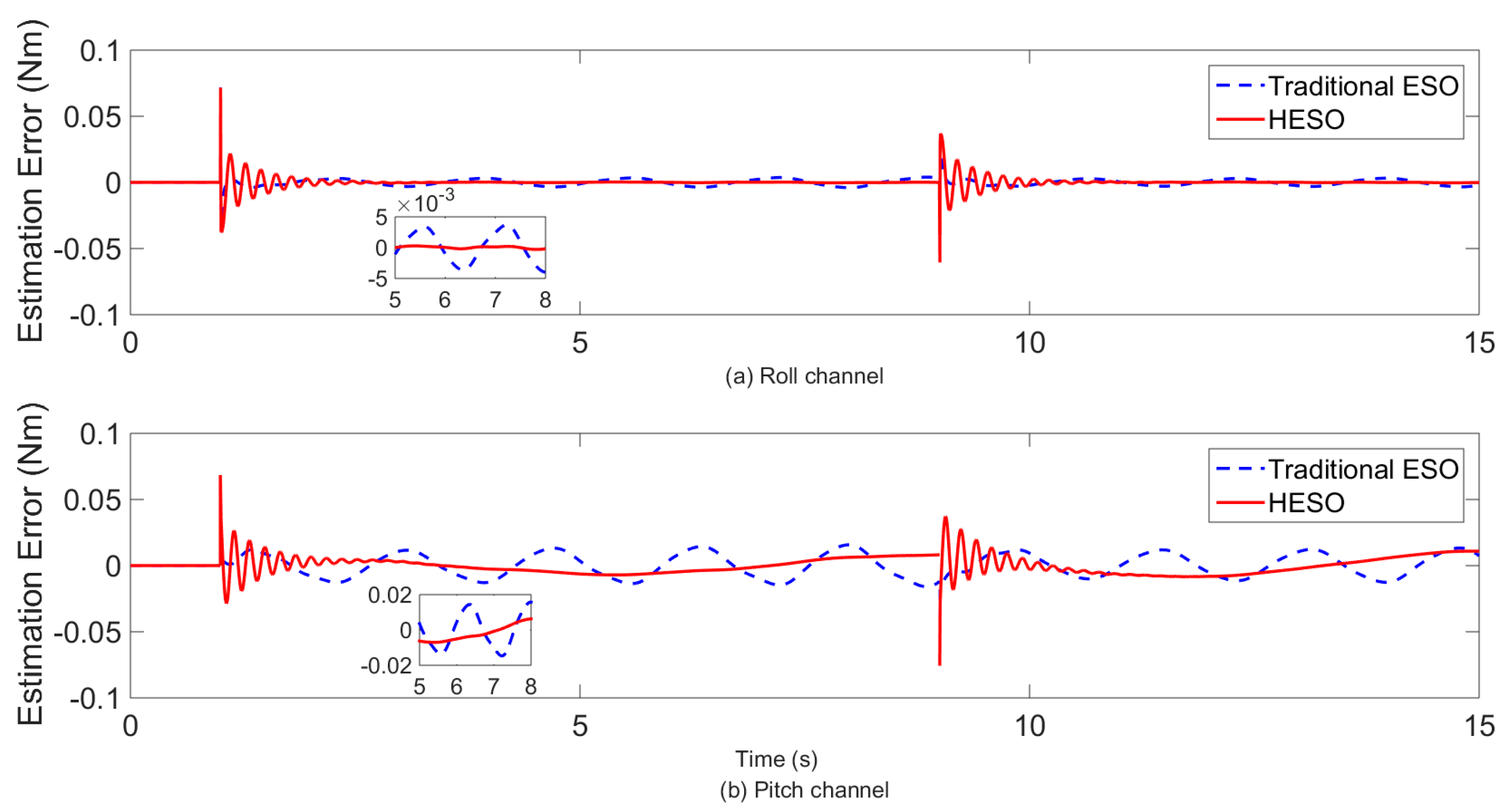
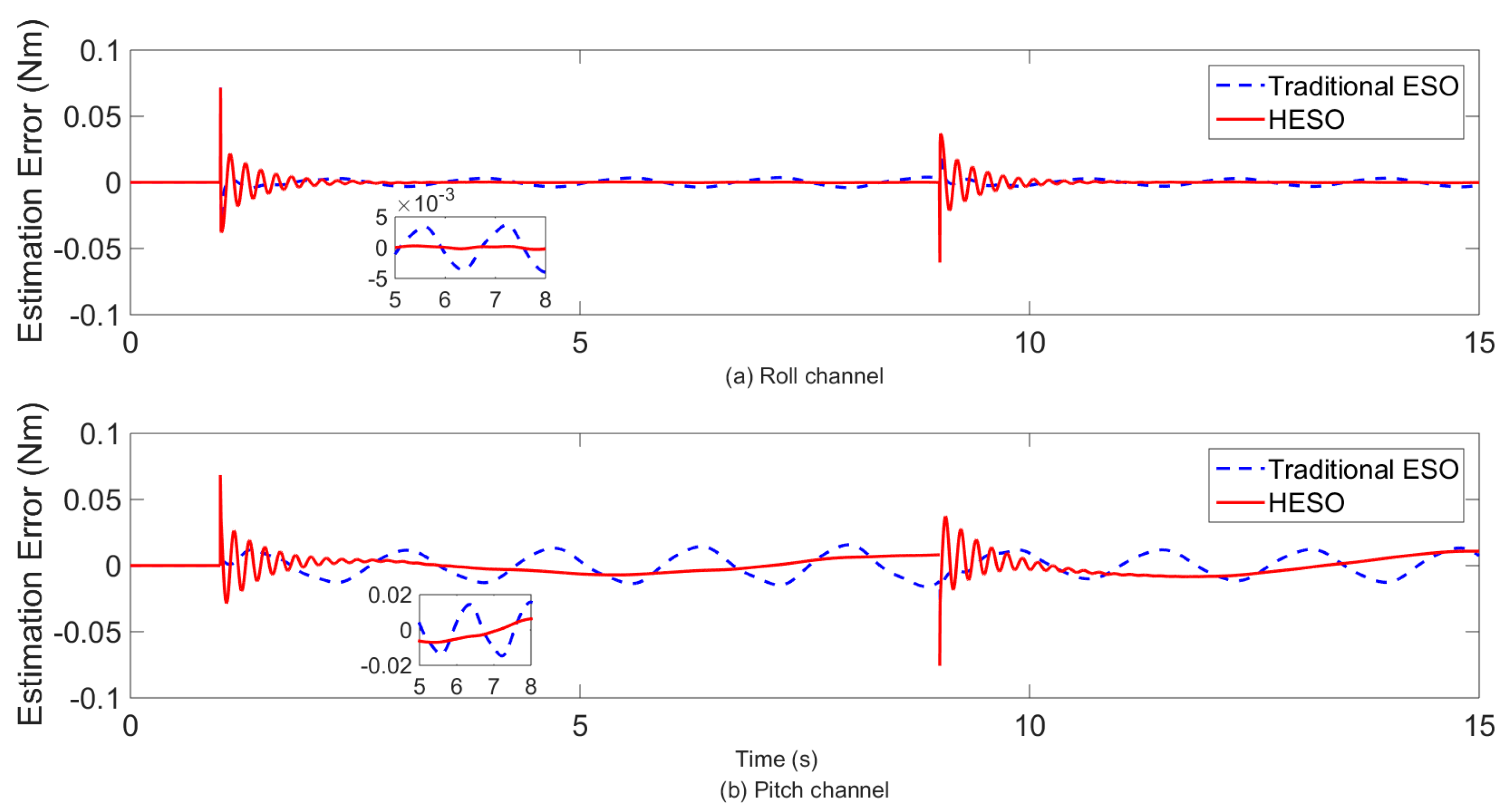
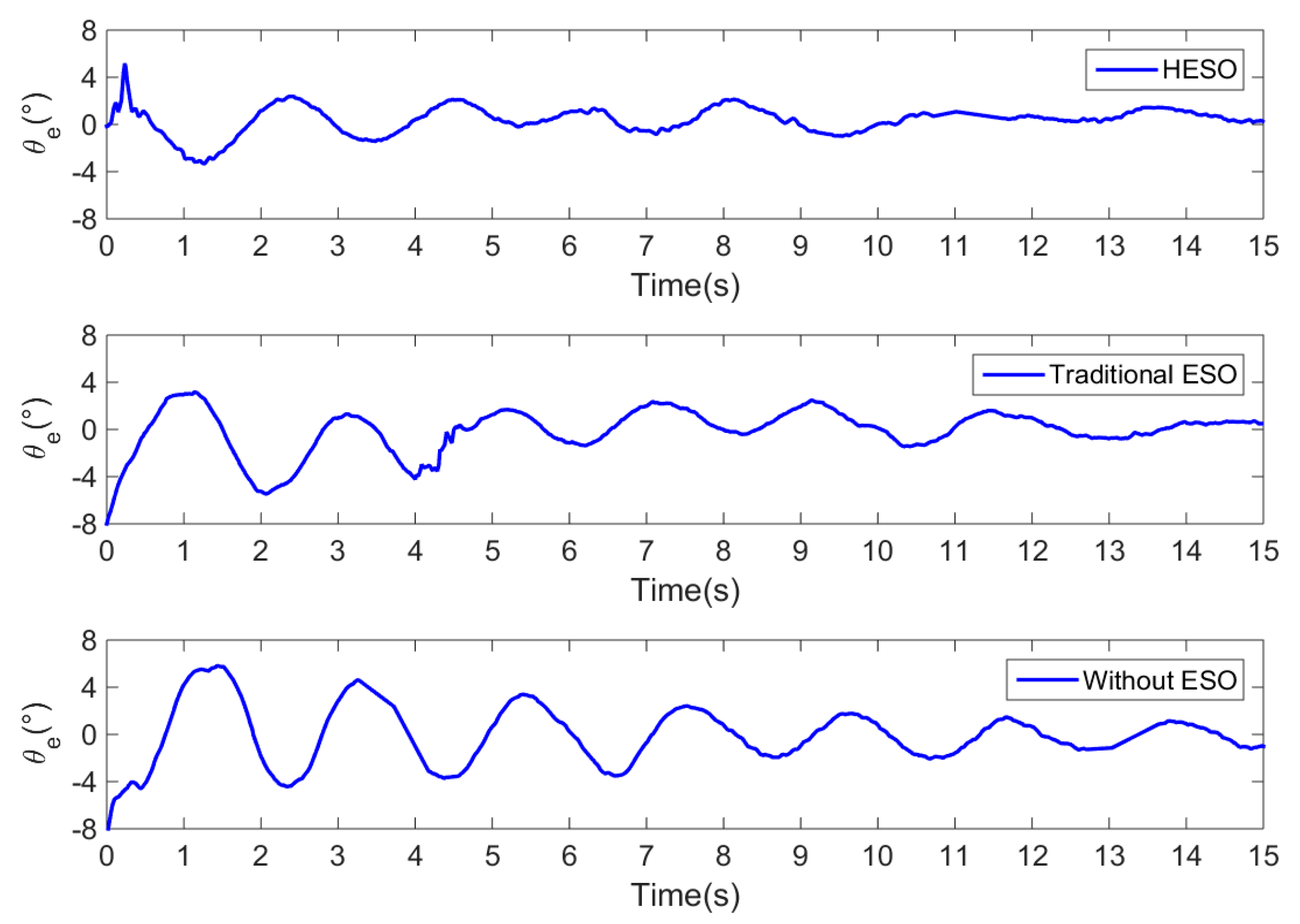
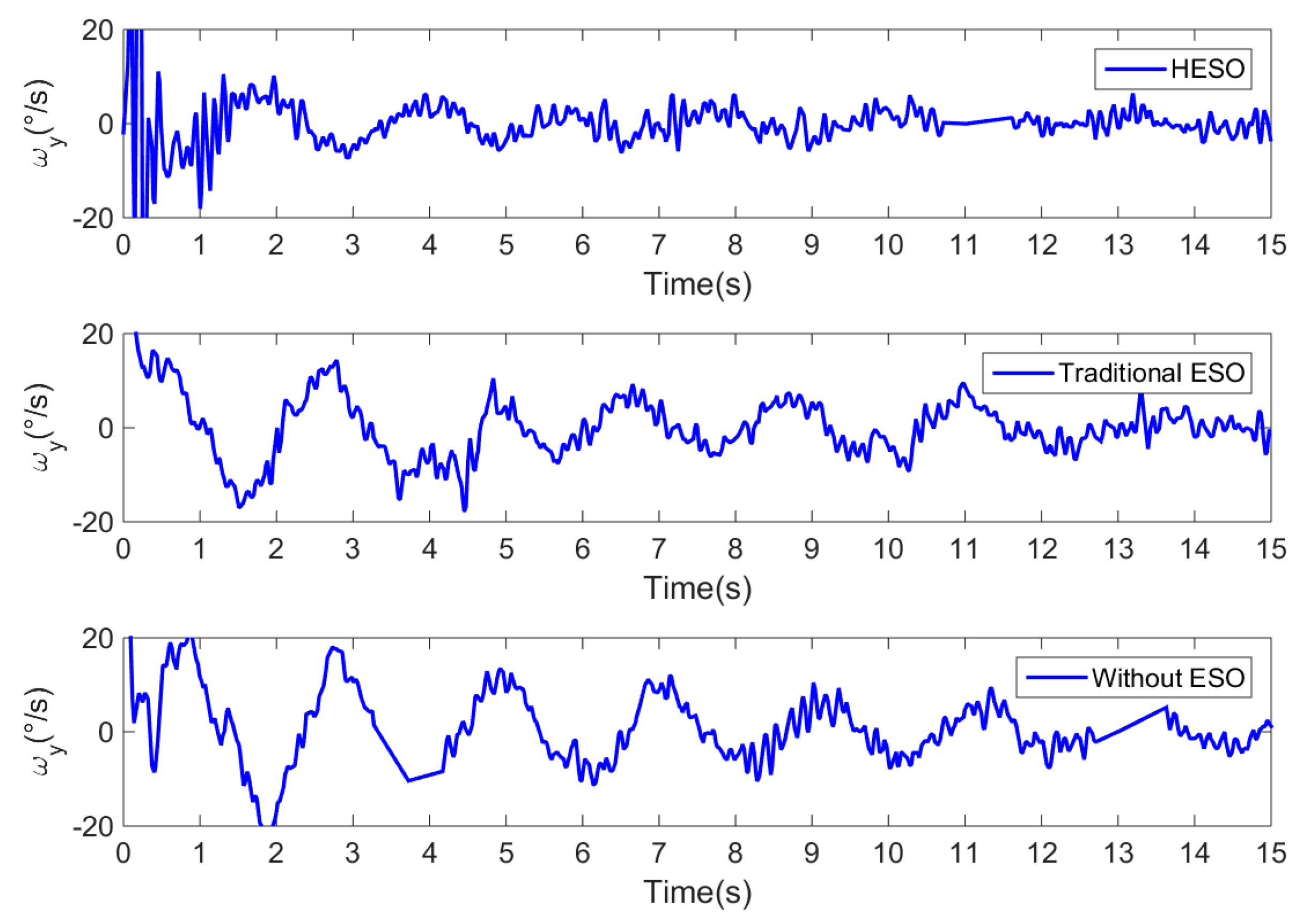
5.1.1. Comparison in Attitude Stabilization Performance
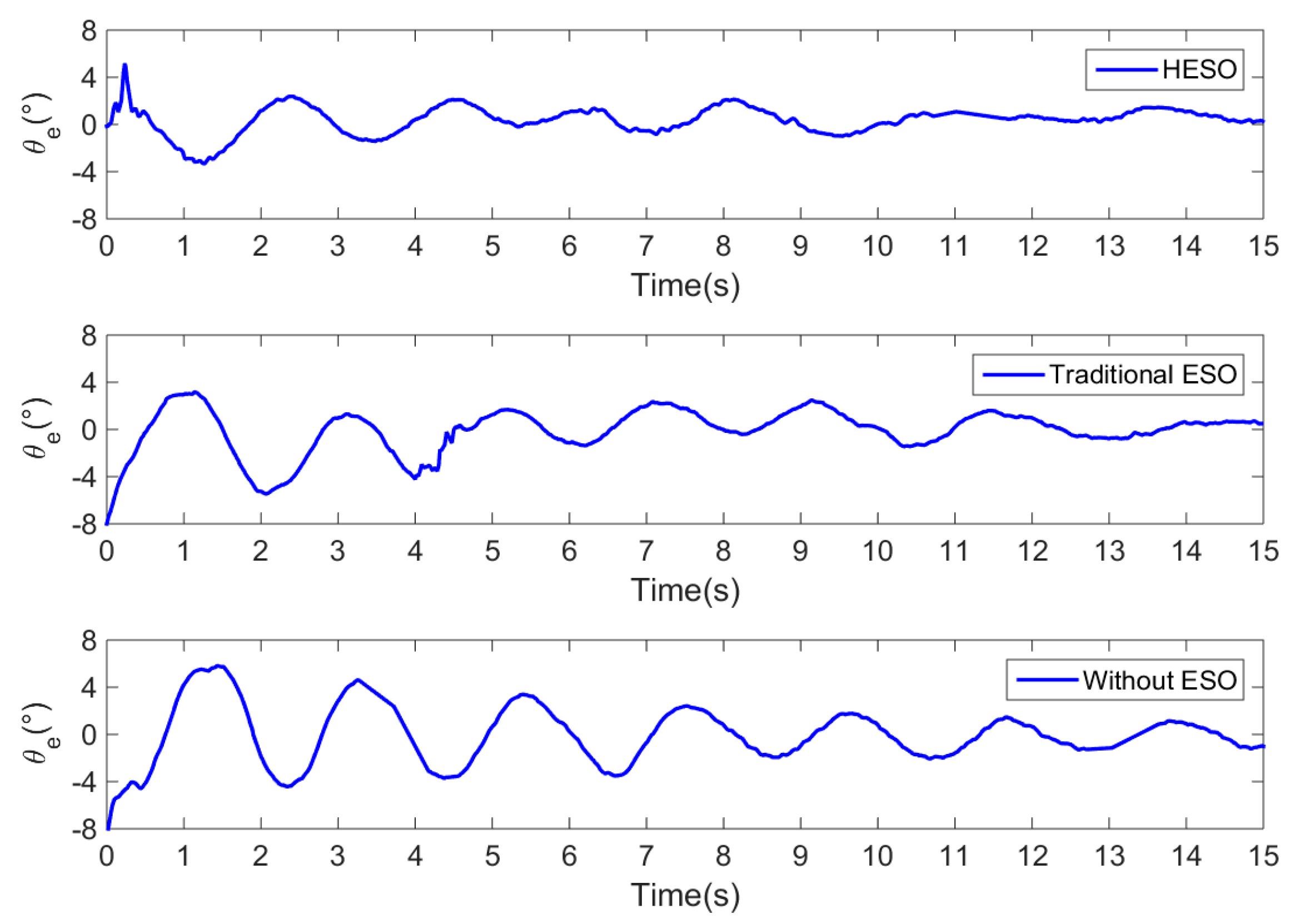
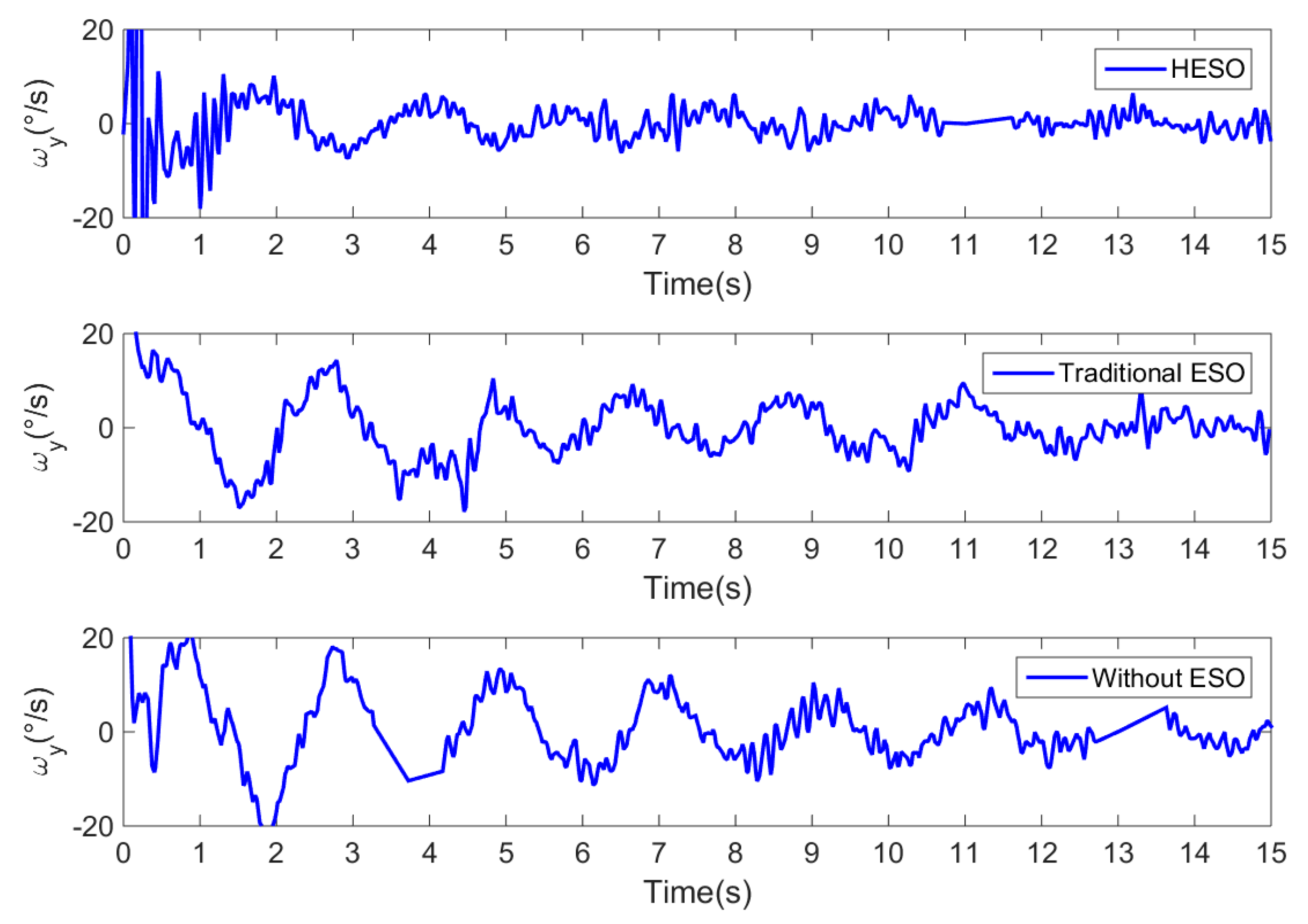
5.1.2. Comparison in Attitude Tracking Performance
5.2. Experimental Results
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Bouabdallah, S.; Becker, M.; Siegwart, R. Autonomous miniature flying robots: Coming soon! IEEE Robot. Autom. Mag. 2007, 14, 88–98. [Google Scholar] [CrossRef]
- Satici, A.C.; Poonawala, H.; Spong, M.W. Robust optimal control of quadrotor uavs. IEEE Access 2013, 1, 79–93. [Google Scholar] [CrossRef]
- Stepaniak, M.J.; van Graas, F.; de Haag, M.U. Design of an electric propulsion system for a quadrotor unmanned aerial vehicle. J. Aircr. 2009, 46, 1050–1058. [Google Scholar] [CrossRef]
- Gupte, S.; Mohandas, P.I.T.; Conrad, J.M. A survey of quadrotor unmanned aerial vehicles. In Proceedings of the IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012. [Google Scholar]
- Ozbek, N.S.; Onkol, M.; Efe, M.O. Feedback control strategies for quadrotor-type aerial robots: A survey. Trans. Inst. Meas. Control 2016, 38, 529–554. [Google Scholar] [CrossRef]
- Bisgaard, M.; la Cour-Harbo, A.; Bendtsen, J.D. Adaptive control system for autonomous helicopter slung load operations. Control Eng. Pract. 2010, 18, 800–811. [Google Scholar] [CrossRef]
- Omar, H.M. Designing anti-swing fuzzy controller for helicopter slung-load system near hover by particle swarms. Aerosp. Sci. Technol. 2013, 29, 223–234. [Google Scholar] [CrossRef]
- Feng, Y.; Rabbath, C.A.; Rakheja, S.; Su, C.Y. Adaptive controller design for generic quadrotor aircraft platform subject to slung load. In Proceedings of the IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 1135–1139. [Google Scholar]
- Huang, M.; Xian, B.; Diao, C.; Yang, K.Y.; Feng, Y. Adaptive tracking control of underactuated quadrotor unmanned aerial vehicles via backstepping. In Proceedings of the American Control Conference (ACC), Baltimore, MD, USA, 30 June–2 July 2010; pp. 2076–2081. [Google Scholar]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive quadrotor control: Attitude, altitude and position experimental studies. IET Control Theory Appl. 2012, 6, 1812–1827. [Google Scholar] [CrossRef]
- Sadr, S.; Moosavian, S.A.A.; Zarafshan, P. Dynamics modeling and control of a quadrotor with swing load. J. Robot. 2014, 2014, 265897. [Google Scholar] [CrossRef]
- Palunko, I.; Cruz, P.; Fierro, R. Agile load transportation: Safe and efficient load manipulation with aerial robots. IEEE Robot. Autom. Mag. 2012, 19, 69–79. [Google Scholar] [CrossRef]
- De Crousaz, C.; Farshidian, F.; Neunert, M.; Buchli, J. Unified motion control for dynamic quadrotor maneuvers demonstrated on slung load and rotor failure tasks. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2223–2229. [Google Scholar]
- Guerrero-Sanchez, M.E.; Mercado-Ravell, D.A.; Lozano, R.; Garcia-Beltran, C.D. Swing-attenuation for a quadrotor transporting a cable-suspended payload. ISA Trans. 2017, 68, 433–449. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.D.; Huang, Y.B.; Xu, C. Adrc methodology for a quadrotor uav transporting hanged payload. In Proceedings of the IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 1641–1646. [Google Scholar]
- Chen, W.H.; Ohnishi, K.; Guo, L. Advances in disturbance/uncertainty estimation and attenuation. IEEE Trans. Ind. Electron. 2015, 62, 5758–5762. [Google Scholar] [CrossRef]
- Yang, J.; Chen, W.H.; Li, S.H.; Guo, L.; Yan, Y.D. Disturbance/uncertainty estimation and attenuation techniques in pmsm drives-a survey. IEEE Trans. Ind. Electron. 2017, 64, 3273–3285. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z. Nonlinear attitude control scheme with disturbance observer for flexible spacecrafts. Nonlinear Dyn. 2015, 81, 257–264. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z.; Du, Y.J. Adaptive sliding mode backstepping control for entry reusable launch vehicles based on nonlinear disturbance observer. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 19–29. [Google Scholar] [CrossRef]
- Pu, Z.Q.; Yuan, R.Y.; Yi, J.Q.; Tan, X.M. A class of adaptive extended state observers for nonlinear disturbed systems. IEEE Trans. Ind. Electron. 2015, 62, 5858–5869. [Google Scholar] [CrossRef]
- Xia, Y.Q.; Pu, F.; Li, S.F.; Gao, Y. Lateral path tracking control of autonomous land vehicle based on adrc and differential flatness. IEEE Trans. Ind. Electron. 2016, 63, 3091–3099. [Google Scholar] [CrossRef]
- Busawon, K.K.; Kabore, P. Disturbance attenuation using proportional integral observers. Int. J. Control 2001, 74, 618–627. [Google Scholar] [CrossRef]
- Gao, Z.W.; Breikin, T.; Nang, H. Discrete-time proportional and integral observer and observer-based controller for systems with both unknown input and output disturbances. Optim. Control Appl. Methods 2008, 29, 171–189. [Google Scholar] [CrossRef]
- Han, J.Q. From pid to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wang, W.W.; Gao, Z.Q. A comparison study of advanced state observer design techniques. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4754–4759. [Google Scholar]
- Madonski, R.; Herman, P. Survey on methods of increasing the efficiency of extended state disturbance observers. ISA Trans. 2015, 56, 18–27. [Google Scholar] [CrossRef] [PubMed]
- Godbole, A.A.; Kolhe, J.P.; Talole, S.E. Performance analysis of generalized extended state observer in tackling sinusoidal disturbances. IEEE Trans. Control Syst. Technol. 2013, 21, 2212–2223. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Zhang, J.; Wang, L.; Su, J.B. Composite disturbance rejection control based on generalized extended state observer. ISA Trans. 2016, 63, 377–386. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.H. Harmonic disturbance observer for nonlinear systems. J. Dyn. Syst. Meas. Control 2003, 125, 114–117. [Google Scholar] [CrossRef]
- Chovancova, A.; Fico, T.; Hubinsky, P.; Duchon, F. Comparison of various quaternion-based control methods applied to quadrotor with disturbance observer and position estimator. Robot. Auton. Syst. 2016, 79, 87–98. [Google Scholar] [CrossRef]
- Bouabdallah, S.; Siegwart, R. Full control of a quadrotor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 153–158. [Google Scholar]
- Quan, Q.; Dai, X. Flight Performance Evaluation of Uavs. Available online: http://flyeval.com/ (accessed on 20 April 2018).
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. Pixhawk: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Meier, L.; Tanskanen, P.; Fraundorfer, F.; Pollefeys, M. The pixhawk open-source computer vision framework for mavs. Int. Arch. Photogramm. 2011, 38, 13–18. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| mq | Mass of the quadrotor | 2 kg |
| ml | Mass of the slung load | 1 kg |
| c | Hook position | 0.2 m |
| Lc | Length of the cable | 1 m |
| Jx | Roll inertia | 1.335 × 10−2 kg·m2 |
| Jy | Pitch inertia | 1.335 × 10−2 kg·m2 |
| Jz | Yaw inertia | 2.465 × 10−2 kg·m2 |
| l | Motor moment arm | 0.18 m |
| g | Gravity acceleration | 9.81 g·s2 |
| kT | Aerodynamic coefficient | 8.54 × 10−6 kg·m |
| kD | Drag coefficient | 1.36 × 10−7 kg·m2 |
| Without ESO | Traditional ESO | HESO | |
|---|---|---|---|
| θe (°) | 2.4696 | 1.8890 | 1.2320 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, D.; Wu, Z.; Chou, W. Harmonic Extended State Observer Based Anti-Swing Attitude Control for Quadrotor with Slung Load. Electronics 2018, 7, 83. https://doi.org/10.3390/electronics7060083
Shi D, Wu Z, Chou W. Harmonic Extended State Observer Based Anti-Swing Attitude Control for Quadrotor with Slung Load. Electronics. 2018; 7(6):83. https://doi.org/10.3390/electronics7060083
Chicago/Turabian StyleShi, Di, Zhong Wu, and Wusheng Chou. 2018. "Harmonic Extended State Observer Based Anti-Swing Attitude Control for Quadrotor with Slung Load" Electronics 7, no. 6: 83. https://doi.org/10.3390/electronics7060083
APA StyleShi, D., Wu, Z., & Chou, W. (2018). Harmonic Extended State Observer Based Anti-Swing Attitude Control for Quadrotor with Slung Load. Electronics, 7(6), 83. https://doi.org/10.3390/electronics7060083