2.2.2. Fast Frequency Calibration Using PLL with Initial Phase Reduction
As shown in
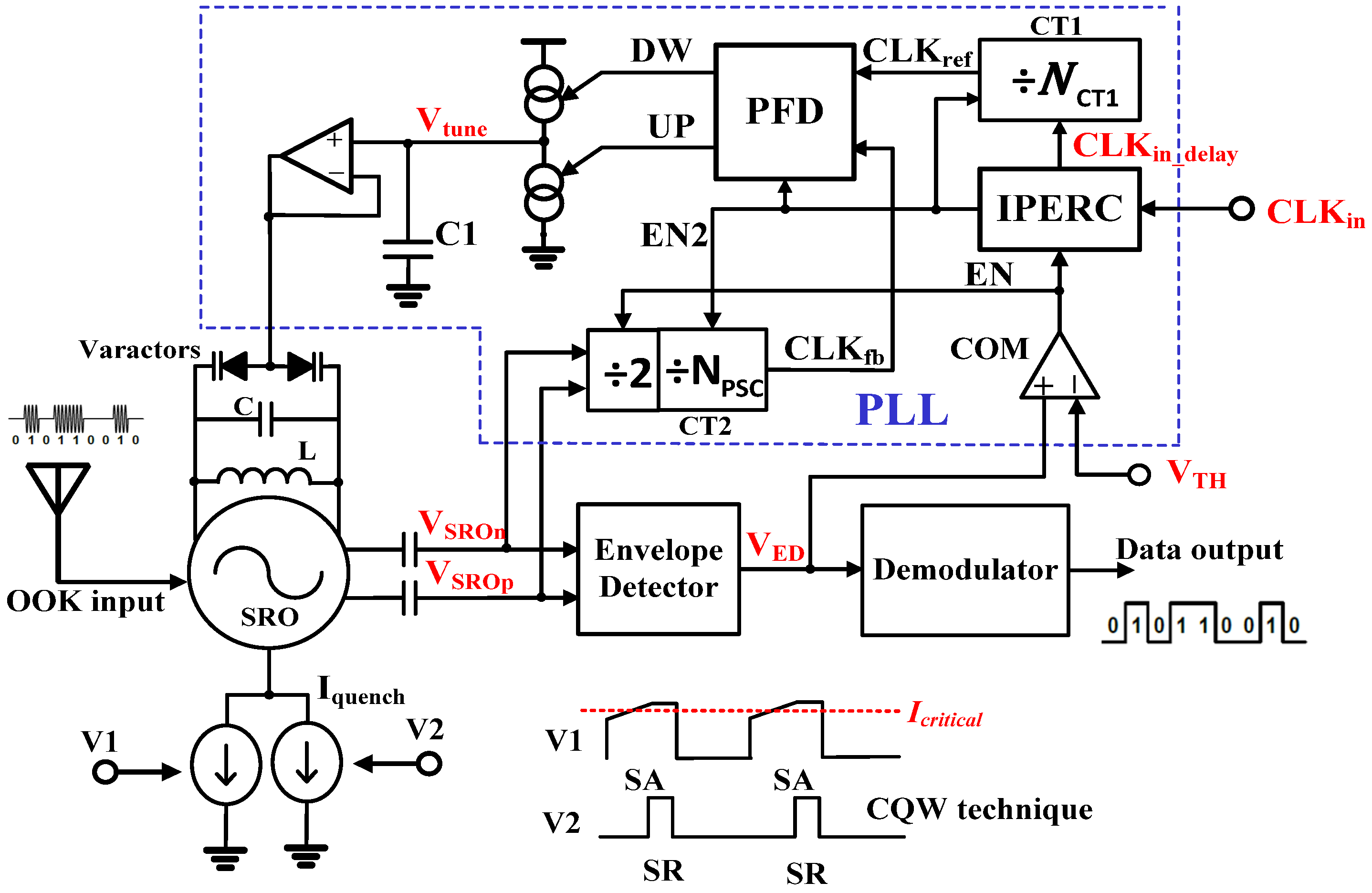
Figure 7, the proposed PLL is composed mainly of a phase detector, a high-speed analog divider (÷2) combined with a pulse-swallow counter (CT2) for RF signal frequency division, a counter (CT1) for the reference clock generation, an initial phase error reduction circuit (IPERC), and a comparator (COM). IPERC is used to eliminate the initial phase error
between the reference clock (
) and the feedback clock (
) stemming from SRO’s output. After initial phase error reduction, the actual phase error between
and
is detected by the phase detector and converted into the pulse width on the phase detector’s output
and
. Then,
and
drive the charge pump to charge or discharge the capacitor
to adjust its voltage
. Finally, the voltage on
is buffered and fed to the varactors to tune SRO’s oscillating frequency.
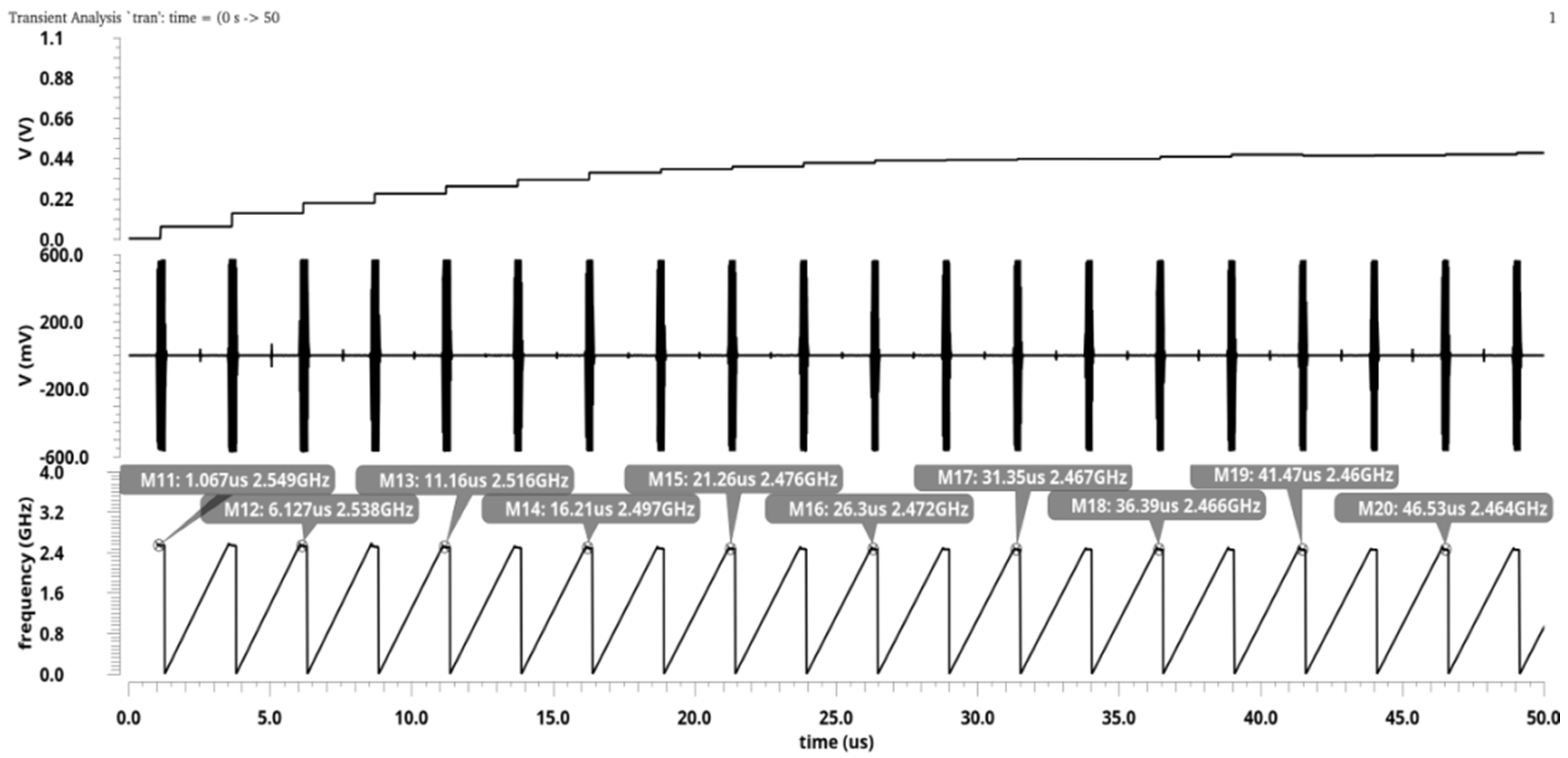
The required frequency calibration time per quenching cycle for the proposed intermittent frequency calibration technique is much shorter than conventional techniques mentioned in Reference [
1,
2,
4] owing to the initial phase error reduction. Equation (6) shows the design parameters which will influence the calibration time. The phase detector output
represents the frequency detecting accuracy and can be derived as:
where
is the initial phase error occurring in the nth cycle,
represents the phase detecting time,
is the overall division ratio including the ratio of the analog divider (÷2) and
from CT2 respectively;
and
are the frequency of
and
respectively, and
is the result of dividing
by
the division ratio of CT1.
is defined as the calibration resolution which represents the difference between the desired SRO oscillating frequency and the current SRO oscillating frequency. As indicated, the ultimate phase error
includes the unpredictable
and the actual phase error between
and
.
Compared with the conventional counterparts in the sate-of-art design, IPERC is the essential of the proposed PLL.
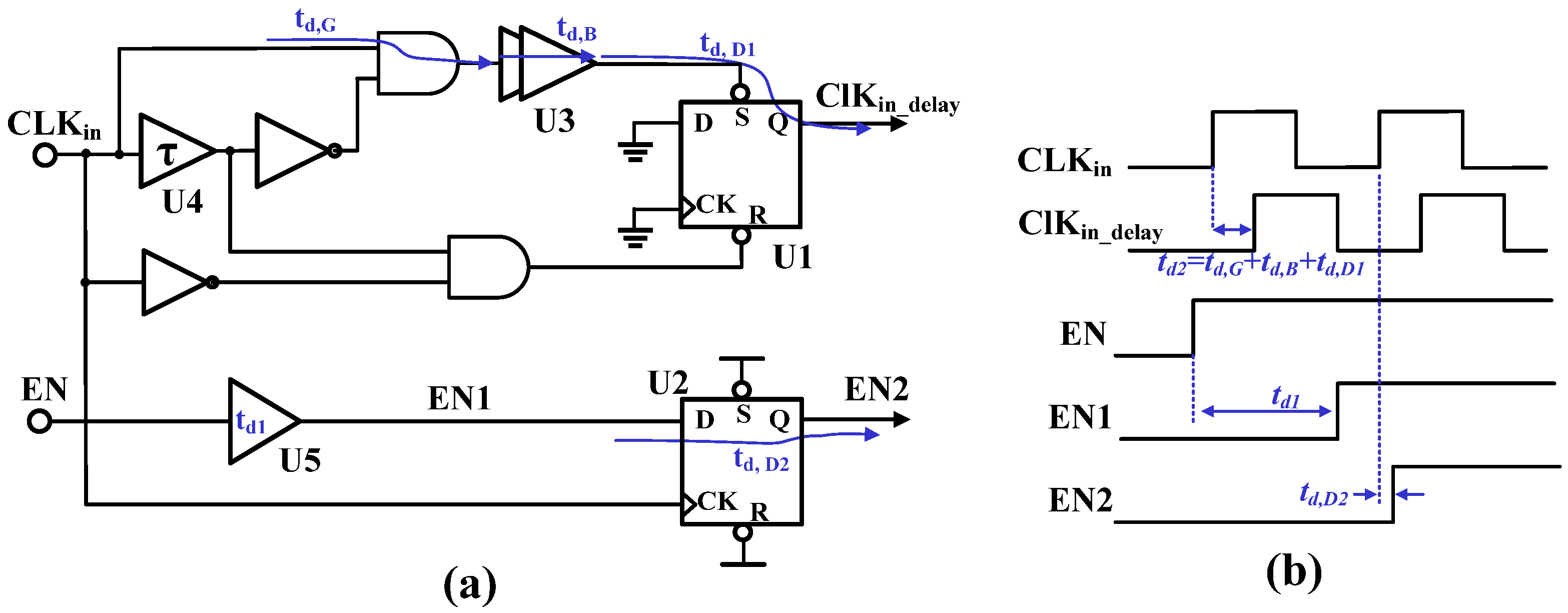
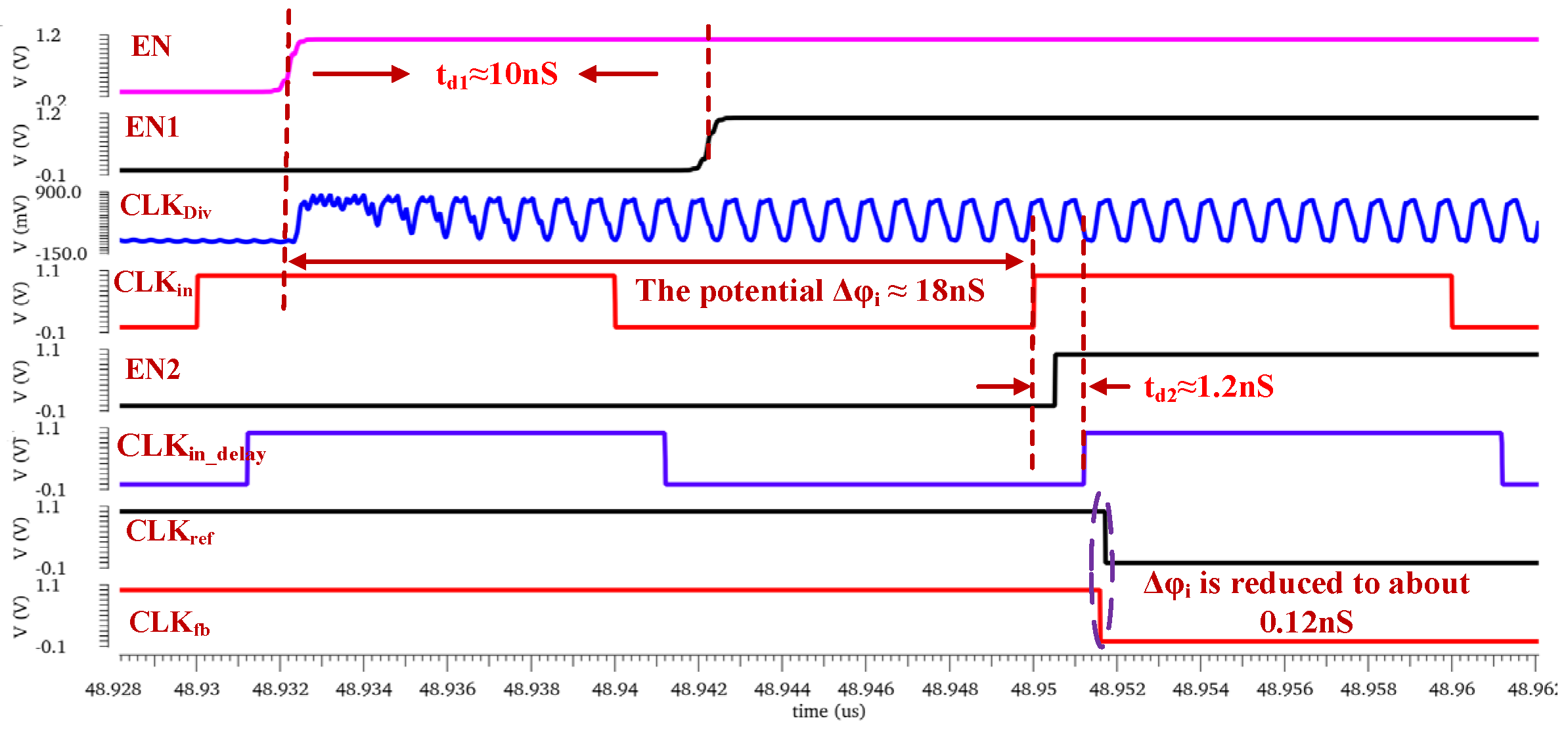
Figure 8 shows the schematic of the IPER and its signal propagation delay diagram, while
Figure 9a illustrates its timing diagram.
In conjunction with those figures, the working principle of IPERC is explained as follows. This circuit includes two identical DFF-type latches, U1 and U2, with a set (S) and a reset (R) inputs. The latch U1 along with a buffer chain (U3), a delay cell (U4), two AND2 gats and two inverters are used to generate
which is a delayed version of the input
. The input
is delayed by
through the delay cell U5 to generate the signal
which is sampled in U2 by
to generate the output
. As shown in
Figure 8b, the rising edges of
will lag behind the corresponding rising edges of
by a delay of
calculated by:
where
is the AND gate’s propagation delay,
is the buffer chain’s delay, and
is the latch’s propagation delay from its input S to its output Q.
Simultaneously, the rising edge of
will lag behind the rising edges of
by a delay of
, the latch U2’s propagation delay from its clock input CK to its output Q. The delay of
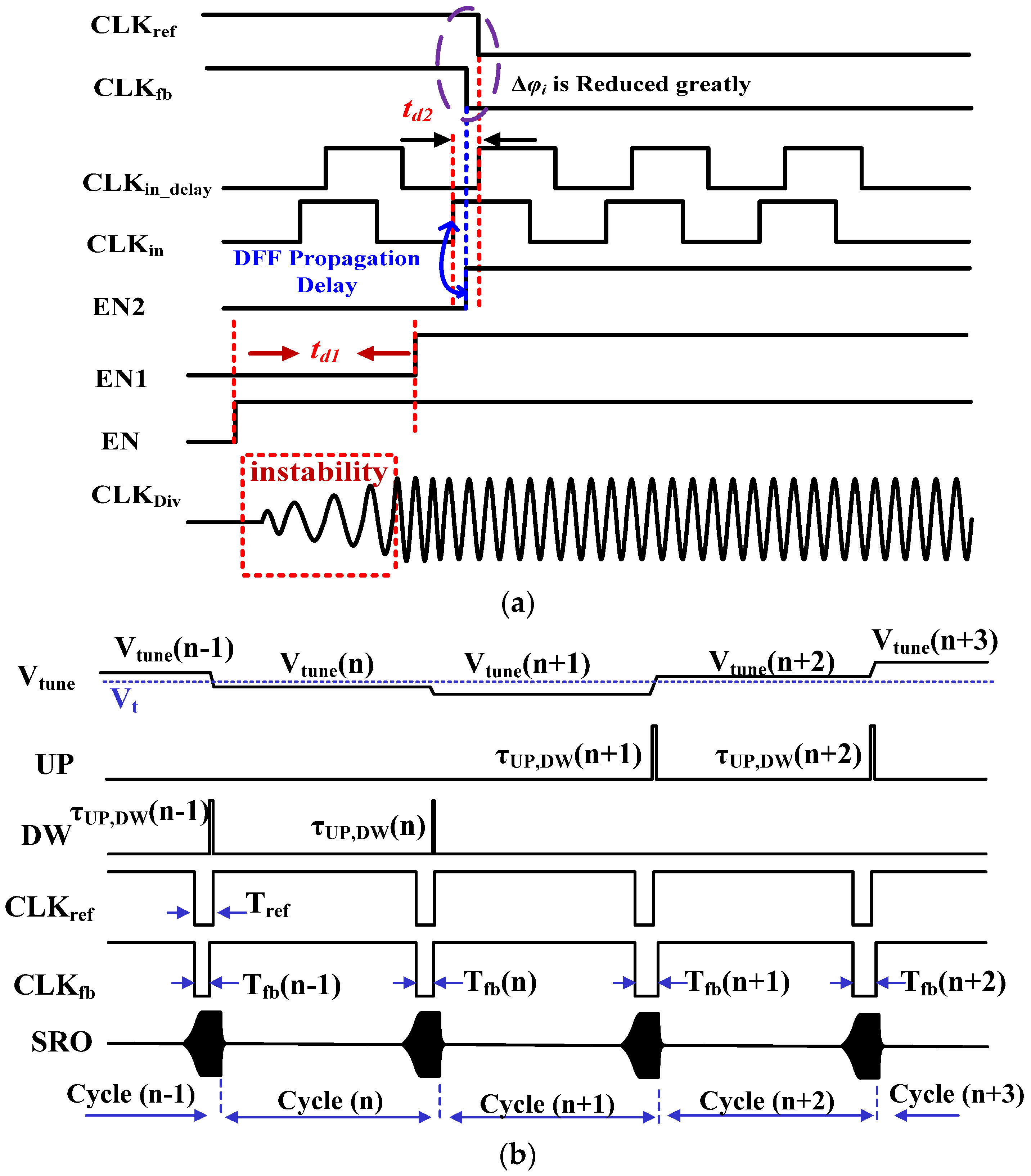
on
is aimed at preventing the division ratio
from the instability of the analog divider during the initial start-up phase as shown in
Figure 9a. To avoid the degradation of detecting accuracy caused by the instability, the value of
must be set greater than the settling time of the analog divider. The duration of the instability varies with PVT variation, and its worst-case scenario is about 5 ns in the proposed design, hence
is set to 10 ns in this design.
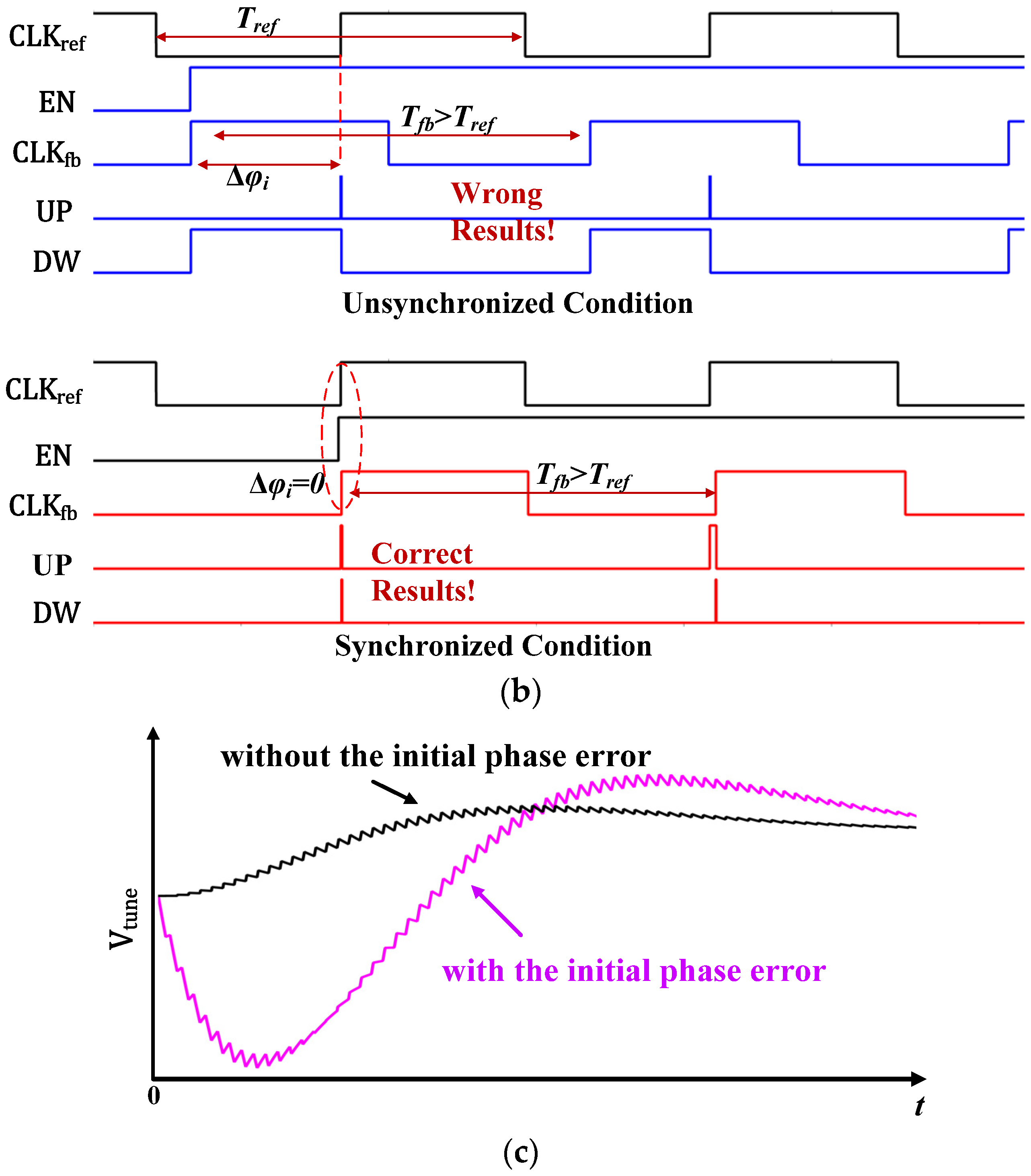
As shown in
Figure 7,
is used to enable the dividers CT1 and CT2 at the same time to synchronize the generation of
and
, and consequently eliminate their initial phase error
. According to Equation (7), the rising edge of
will always lead the rising edge of
by a value of
. That prevents CT1 from missing the first rising edge of
when
turns high. Since
approximately equals
,
can be set by the buffer chain U3 to provide synchronization between
with
. As a result,
can be reduced from tens nanoseconds to less than 1 ns despite PVT variations.
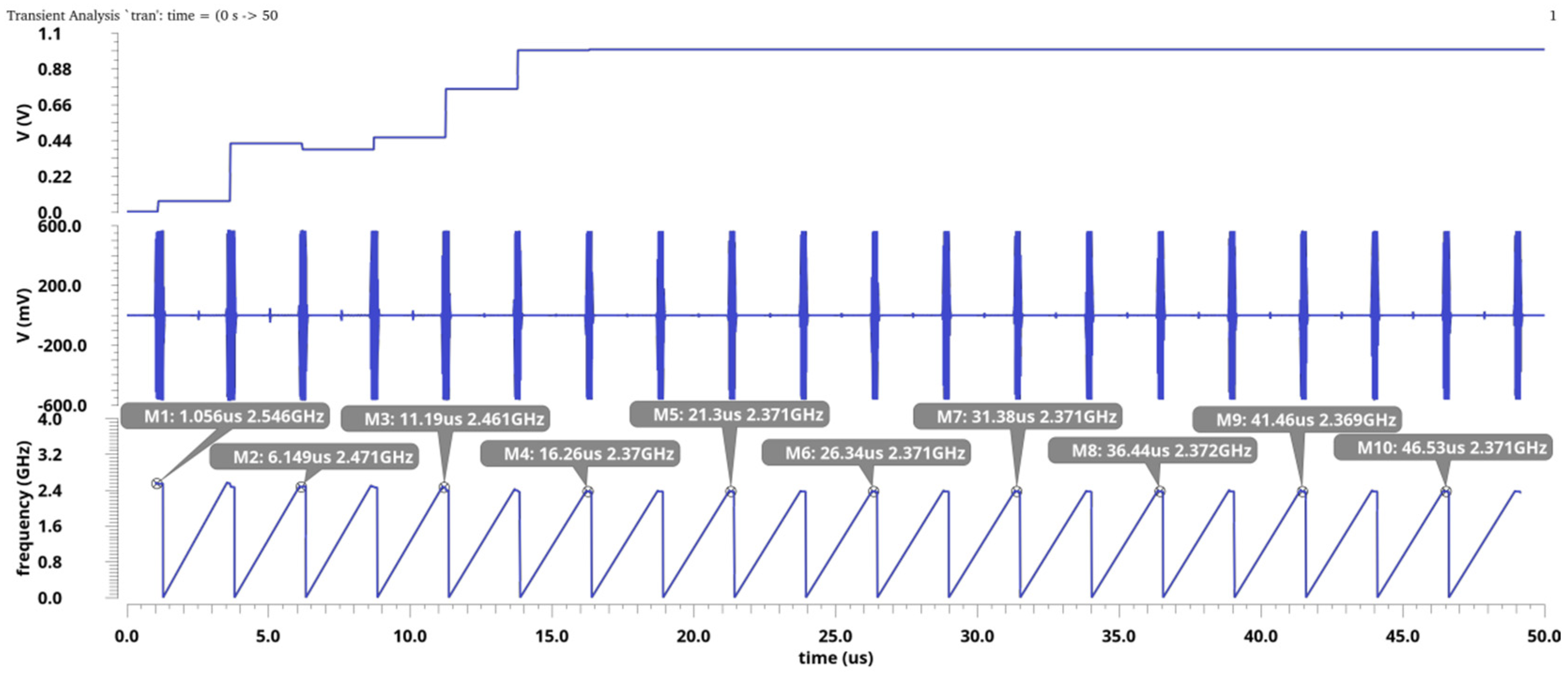
Figure 9b presents the timing diagram of the main signals in the proposed PLL. The PLL operates on cycle by cycle basis by detecting the frequency error between
and
, and adjusting the tuning voltage
and consequently the oscillating frequency of SRO in each cycle. To systematically analyze its performance, the following hypotheses are considered: (1) the PLL operated in a quasi-periodic steady state mode; (2) The transient charging or discharging behavior of the charge pump is neglected. After calibration, the negative pulse width
of
approximately equals
, the counterpart of
; while the tuning voltage
will approach the desired level
. Therefore, the following equations can be found:
where
is the initial phase error in the cycle
,
is the pulse width of PFD’s outputs;
is the current of the charge pump;
is the capacitance of C1; and
is the voltage-to-frequency gain of SRO (assumed to have a negative value),
is the oscillating frequency of SRO while
is its initial value. Those equations can be combined as:
It is notable that
equals the target frequency
which is expected to be
. Additionally, ∆
Vtune(
n)∆
Tfb(
n) is sufficiently small compared to other terms in Equation (9), and can be neglected. The Equation (9) can be rewritten as:
Substituting Equation (10) into Equation (8) yields:
By applying Z-domain analysis to Equation (11), the transfer function of the PLL can be written as:
As implied by Equation (12), the necessary and sufficient condition for the stability of the proposed PLL is:
The step response of the system can be written as:
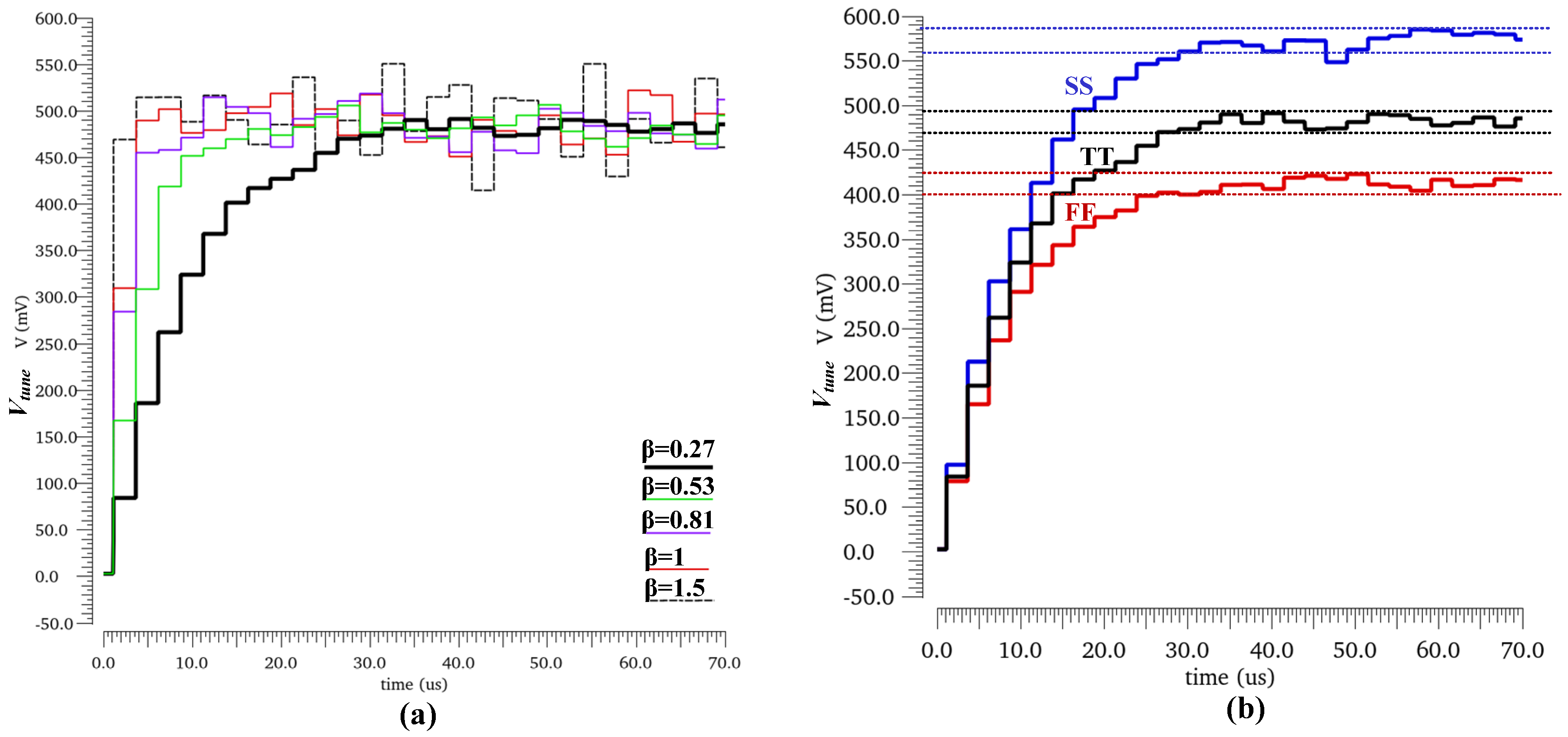
From the above equation, it can be observed that a larger
can lead to a faster system’s convergence but results in a larger ripple on
. In this design,
is set to 0.27 to guarantee accurate frequency calibration as it is discussed in
Section 3.
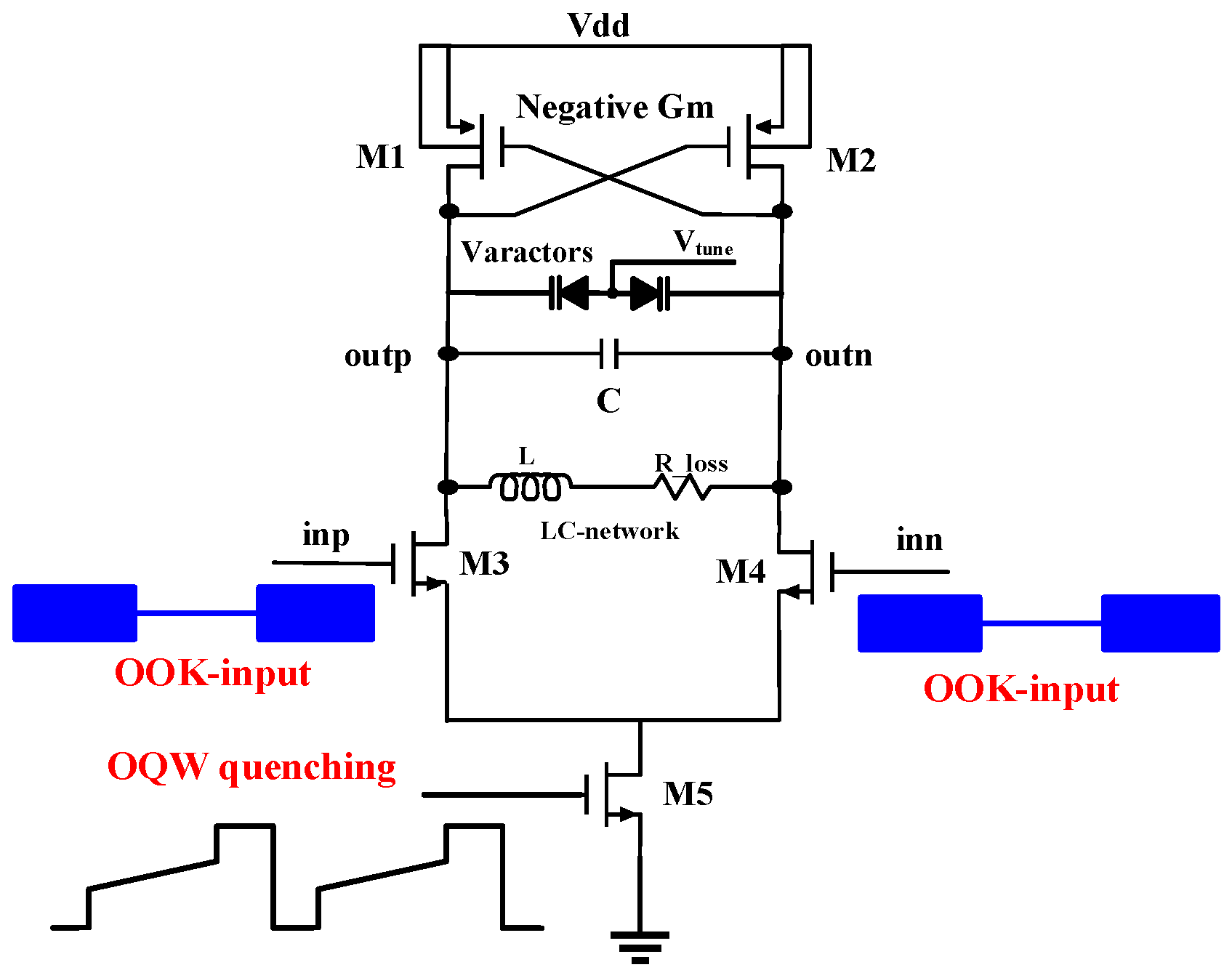
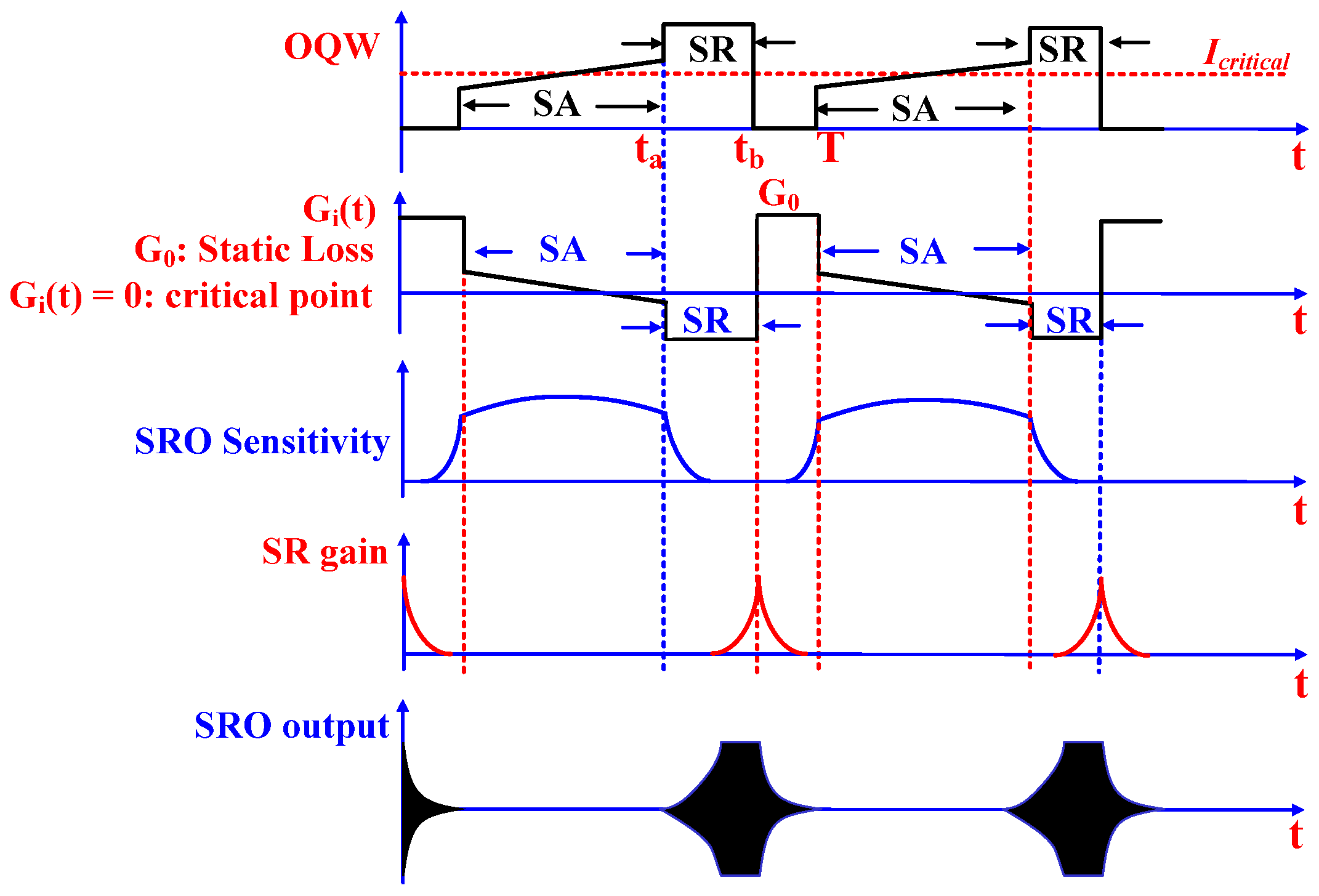
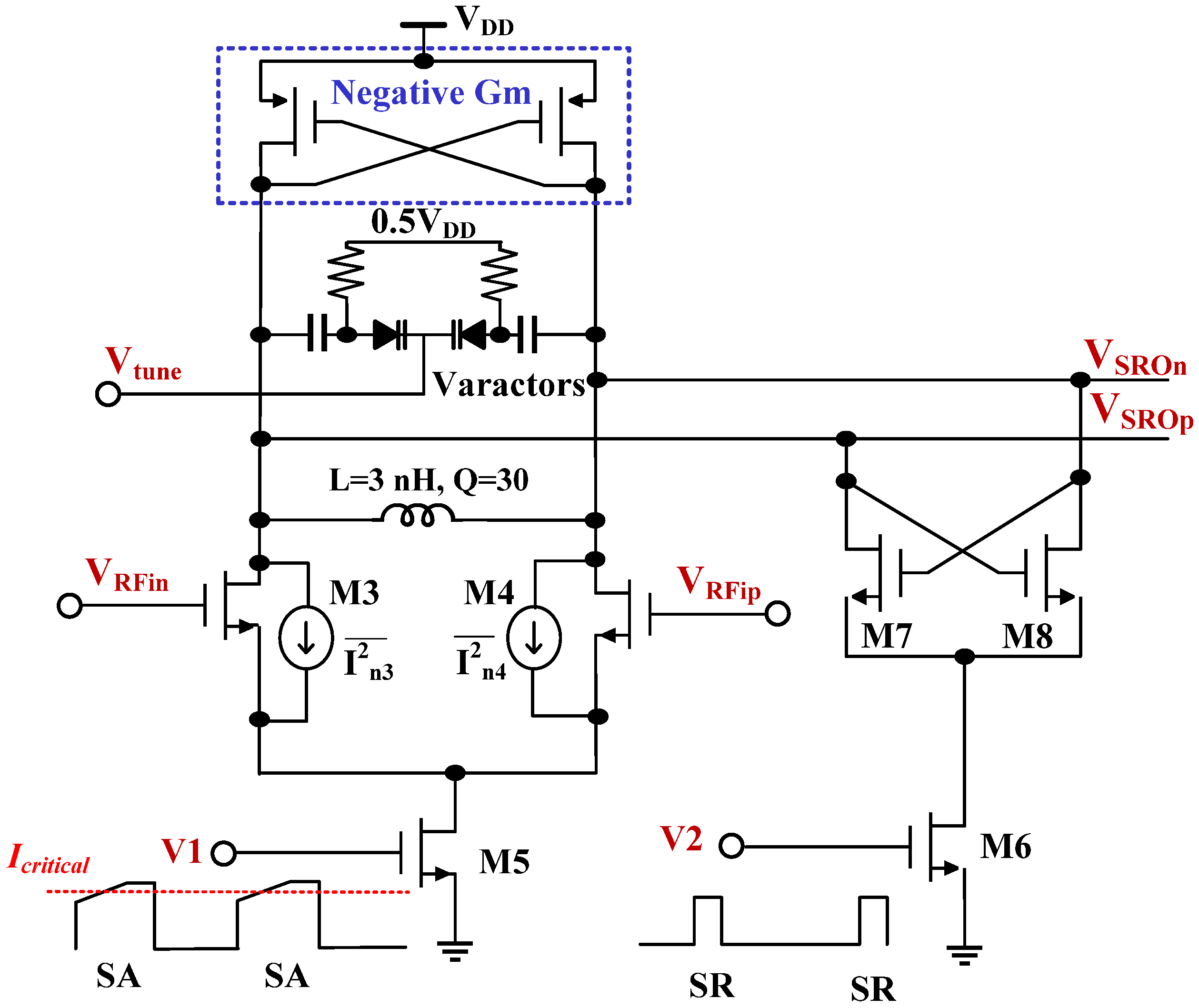
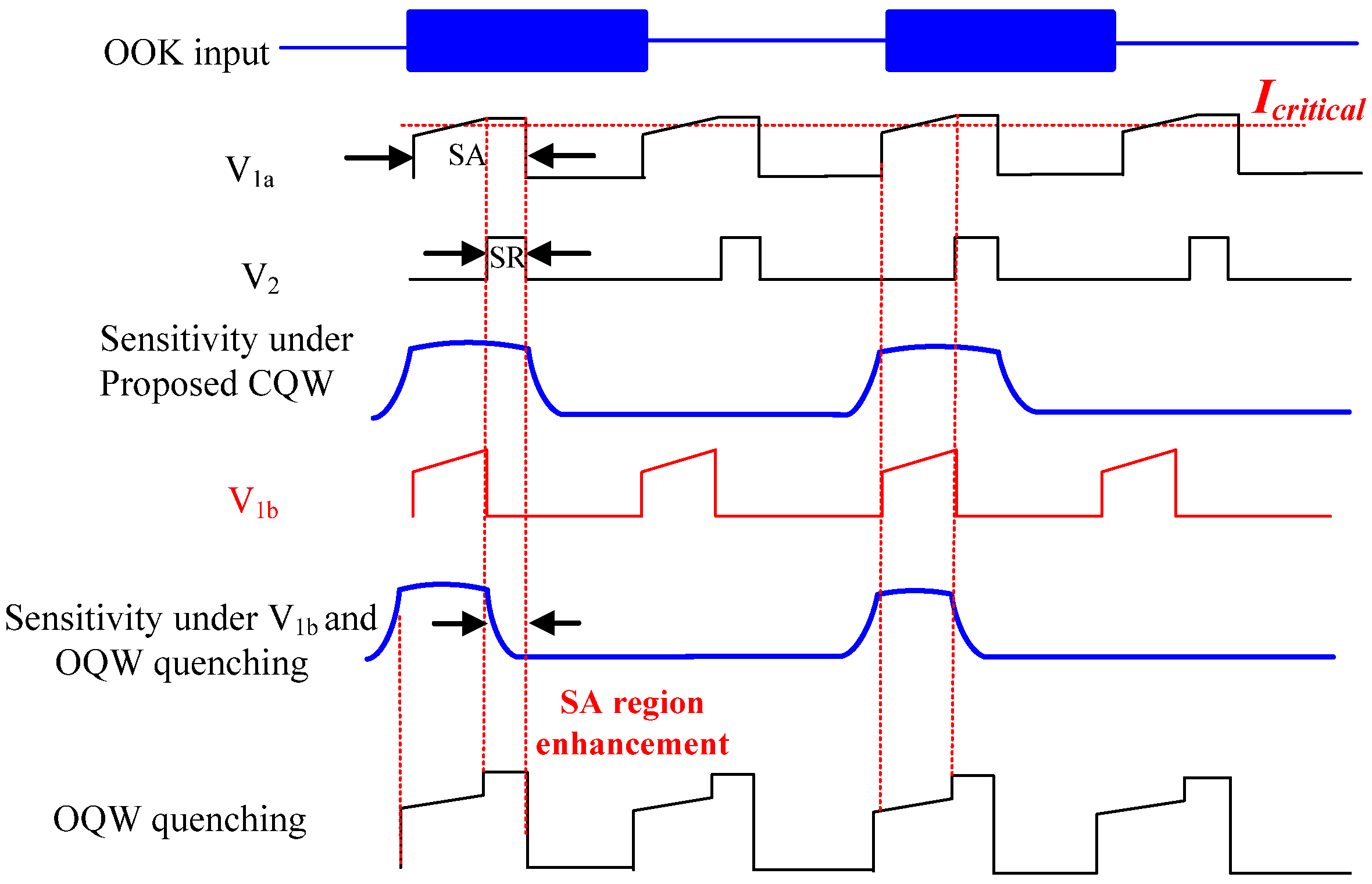
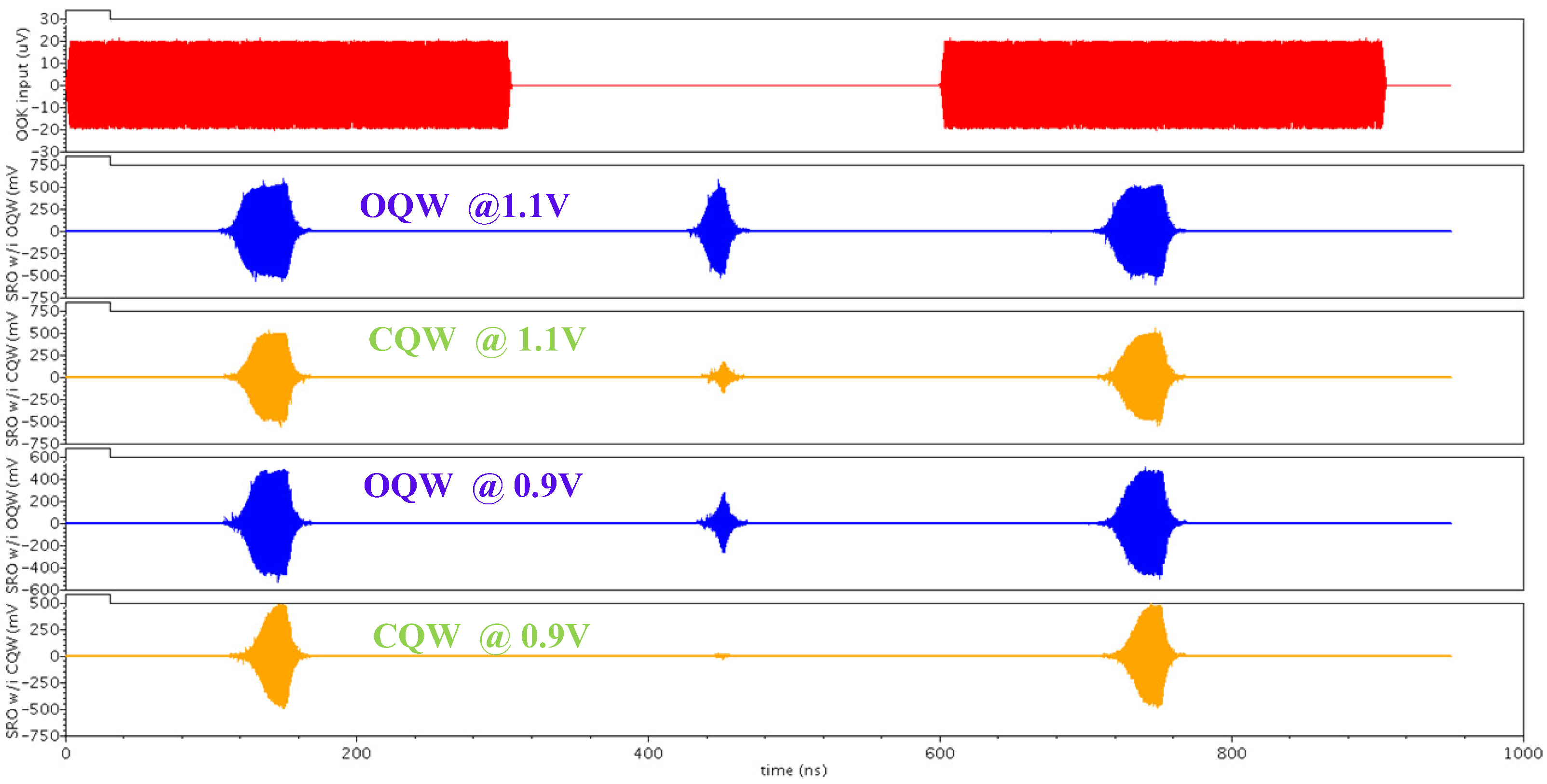
2.2.3. SRO with Concurrent Quenching Waveform
The proposed SRO architecture and its timing diagram are shown in
Figure 10 and
Figure 11 respectively. In contrast to conventional SRO architectures, the SA and SR regions in the proposed one are separately controlled by M5 and M6 which perform the proposed CQW operation. M5 is controlled by
and is on for the entire quenching period (case when
in
Figure 11). M6 is controlled by
and is on only during the SR region. When M5 is on, the SRO is always operating in the vicinity of I
critical and accumulates sensitivity during the entire quenching phase. When M6 is on, the SRO performs super-regeneration and sensitivity accumulation simultaneously, while the conventional SRO architecture with OQW loses sensitivity accumulation during SR region. When the transistors M5–6 are both on, the SRO is in SR region and concurrently regenerates the SRO output and samples the input signal for the entire quenching cycle.
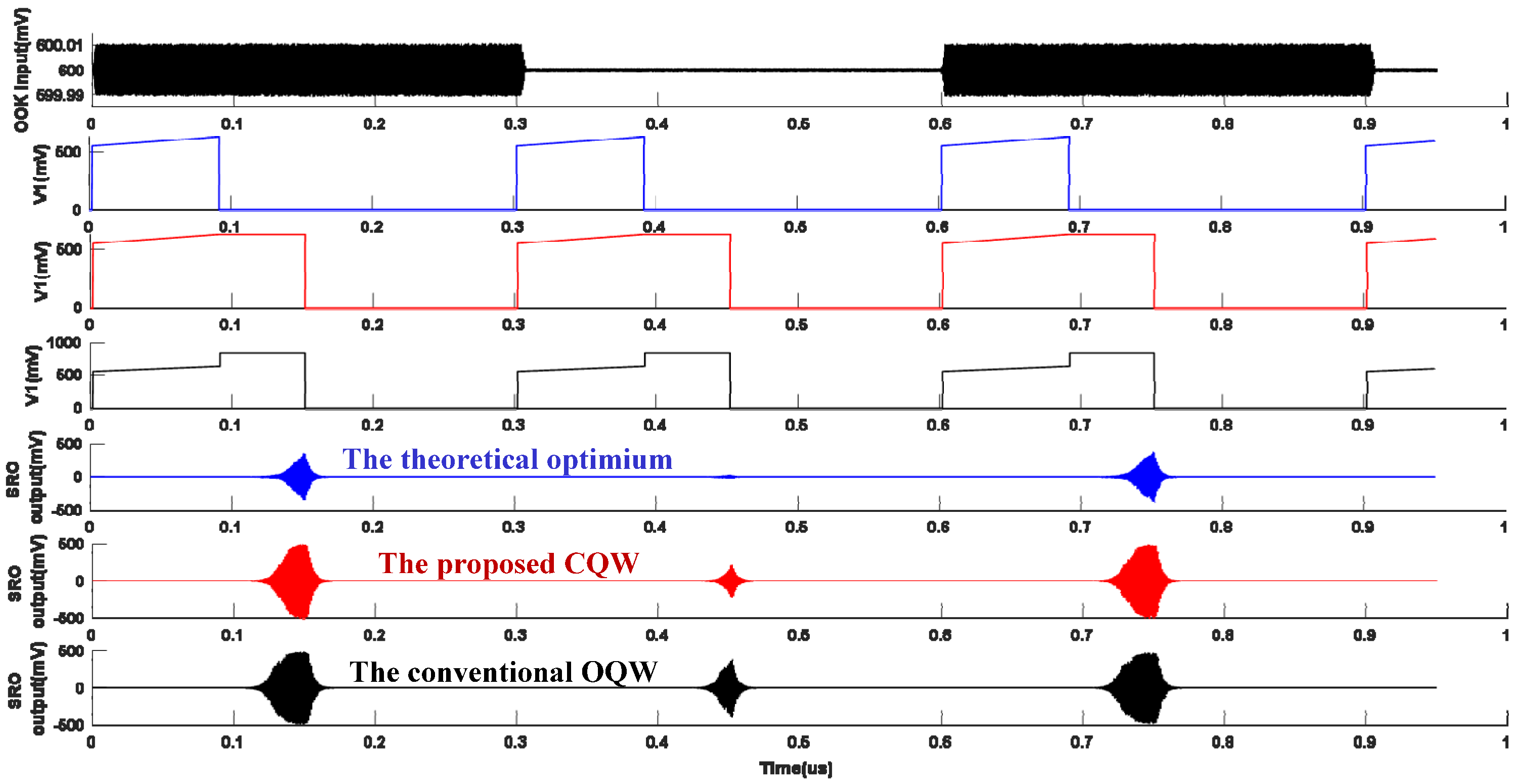
Splitting the quenching signal into
and
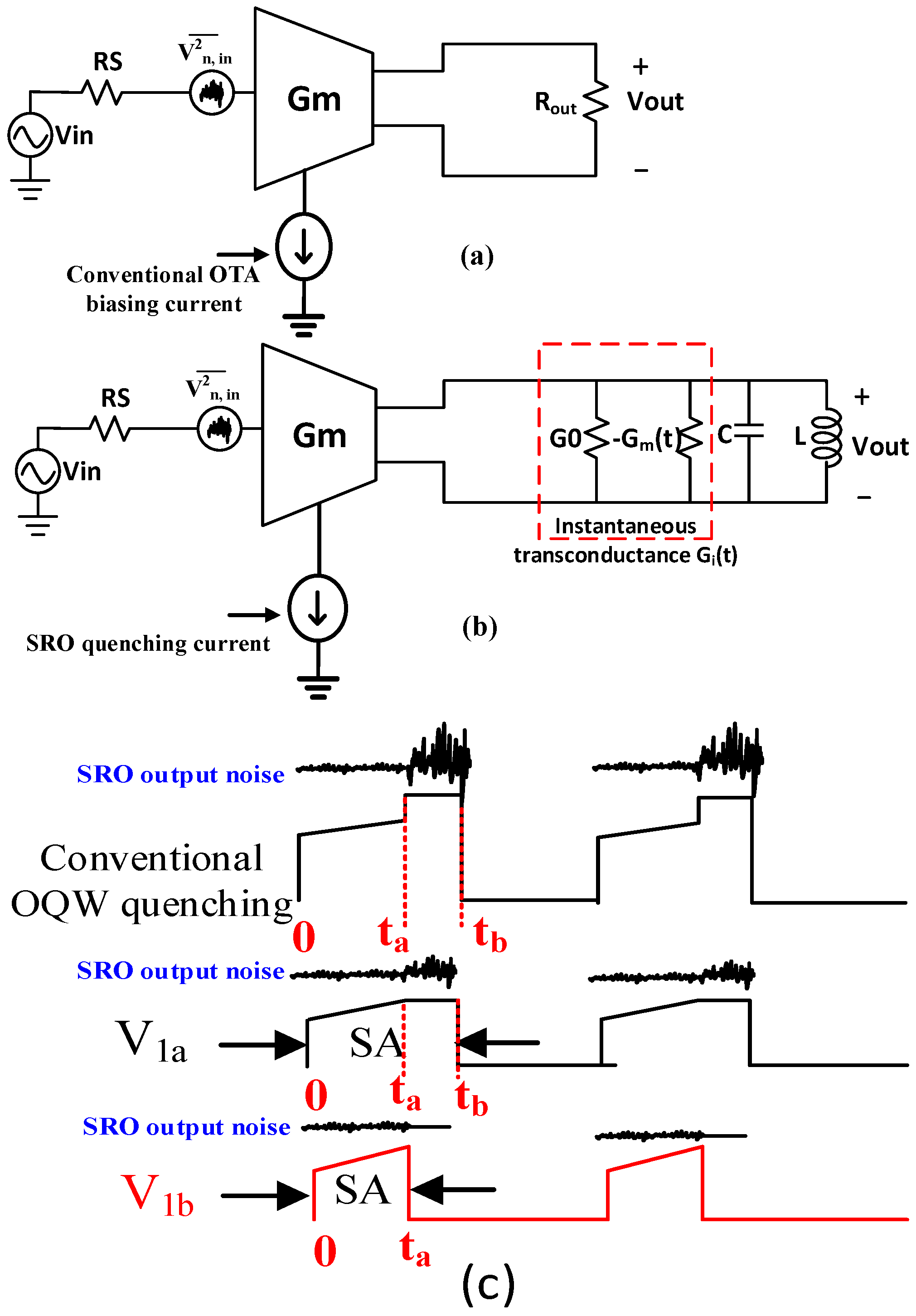
allows optimizing the noise performance in addition to improving the accumulated sensitivity compared to OQW as will be explained later.
Figure 12c shows the SRO output noise with different
waveforms,
and
, along with OQW scheme. For
, M5 is on for the entire quenching period to improve sensitivity and noise compared to OQW. For
M5 is turned off to improve more the noise performance compared to the case of
while achieving same sensitivity as OQW.
To understand how to optimize the noise of the SRO it is instructive to compare the noise performance of an OTA and an SRO as shown in
Figure 12a,b. The small signal model of an OTA and SRO are different by the type of load. Additionally, the OTA is biasing using constant current while an SRO is biased using its customized quenching waveform. The output referred noise of an OTA can be analyzed as follows:
where
and
are the input and output referred noise respectively. Gain of an OTA,
simply equals
. Since the biasing current is a constant value which means that the
maintains a constant value. In conventional linear receivers with OTA placed as the front-end signal detector, increasing the biasing current will cause input referred noise to decrease because the current thermal noise of an MOS transistor is proportional to
while the input referred noise is inversely proportional to
.
Similarly, the input referred noise of the SRO can be intuitively analyzed also by starting from the SRO gain
[
7,
8] as the following:
with
where
is the SRO regenerative gain and
is the SR gain as given in Equation (5).
The gain
can also be written as the following:
where
is the the equivalent noise bandwidth (ENB) of the SRO frequency response.
and
refer to the effective transconductance of M3–4 in
Figure 10 and static loss of the SRO. For practical design purposes, in Equations (16)–(19) the SRO regenerative gain
is much greater than the SR gain
for the SRO to achieve good sensitivity. The noise bandwidth in Equation (18) is determined by the selectivity of the SRO.
As we can notice, the major difference for the noise analysis between conventional OTA-based receivers and SR receiver is that the gain
of an SRO is consists of 3 different components, namely static loss, regenerative gain, and super-regenerative gain corresponding to
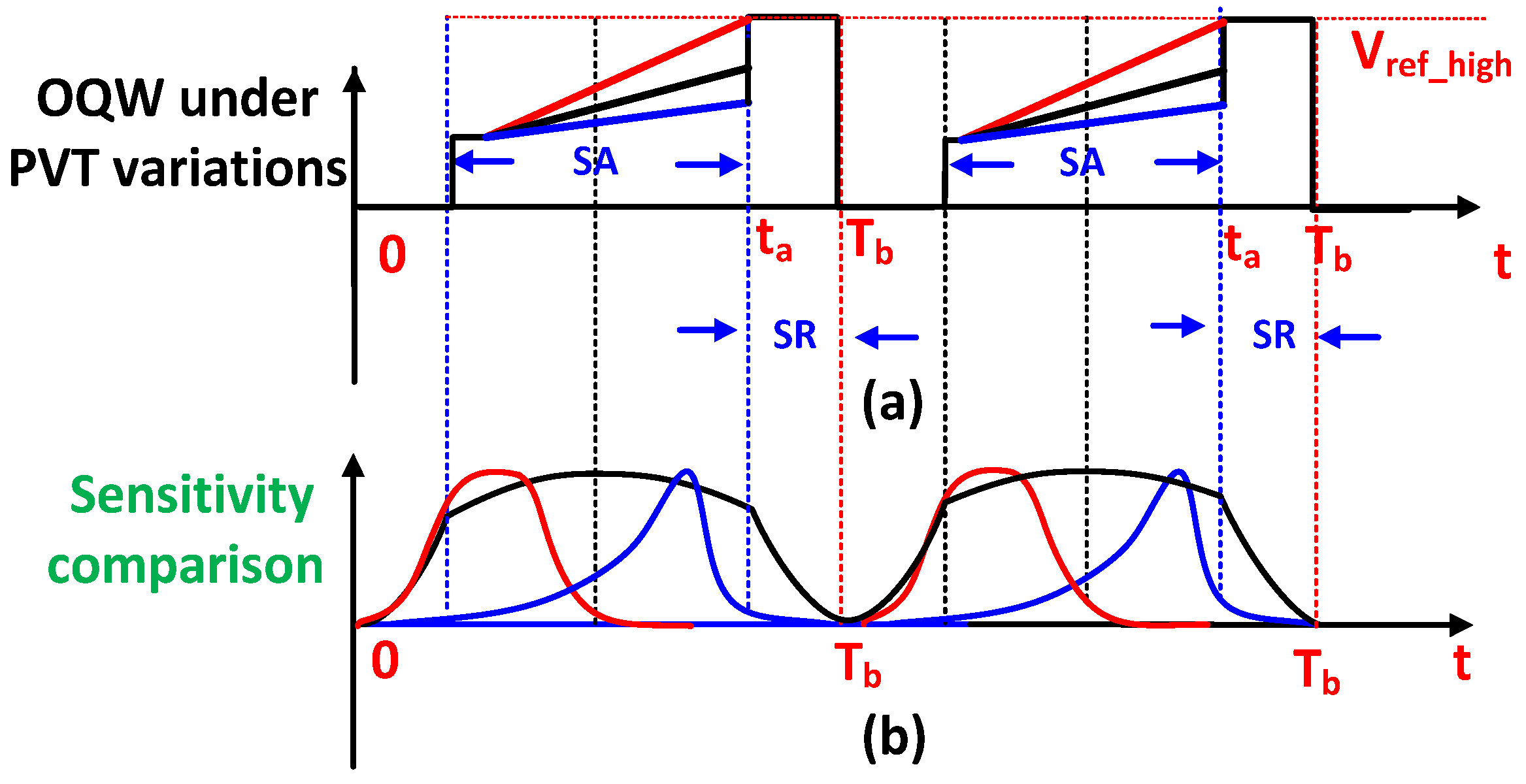
respectively. For the proposed CQW scheme applied as quenching signal for the SRO under
, the sensitivity region has been extended over the entire quenching cycle and the SRO is always responding to the input OOK signal for both SA and SR regions. Therefore, the major contribution of the SRO gain
is not degrading through the entire quenching cycle and hence reducing the input referred noise and improving the SNR. In contrast, for the SRO under OQW quenching, the SR region is only responsible for generating the oscillation envelope, in response to the SA region, while
is dramatically reduced because the sensitivity decays to 0 (refer to
Figure 11). Therefore, the input referred noise will dramatically increase and hence degrade the SNR. It is straightforward to find that the SRO frequency response has narrower noise bandwidth for the proposed CQW technique compared with the conventional OQW quenching because the proposed CQW technique extends the sensitivity for the SRO in time domain and therefore, it automatically reduces the
to reduce the noise.
The dominant noise source of the SRO circuits is stemmed from the input transistors (M3–4 in
Figure 10); when
the transistors M3-M4 are turned off in SO region to reduce the noise as highlighted in red in
Figure 12c. That will maintain the same SA region compared with the OQW while reducing the biasing current completely in the SR region for the input transistors M3–4 to maximize the SNR for the SRO under the trade-off of lower sensitivity accumulation compared to the case of
.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}