1. Introduction
The Global Positioning System (GPS) uses radio waves to provide users with positioning, navigation, and timing (PNT) services. GPS navigation signals have numerous applications in space weather, biology, and everyday life [
1]. GPS is one of several Global Navigation Satellite Systems (GNSS), which include the Russian Global Navigation Satellite System (GLONASS), the European Galileo, and the Chinese BeiDou systems (BDS) [
2]. IS-GPS-200 [
3] illustrates receivers could solely use legacy L1C/A signals for positioning before GPS modernization. The modernization of GPS brings quite a few benefits to civil GPS users. The first IIR-M satellite launched in 2005 brought a new civil signal L2C that was primarily to meet commercial use and was open to civilians. Thereafter, all satellites launched by GPS would transmit L2C [
4]. Subsequently, the third generation civil signal of GPS, the L5 signal started broadcasting in a protected aeronautical radio navigation service band that was mainly for safety-of-life transportation. The full L5 signal has been implemented with the launch of the first block IIF in May 2010 [
5].
Despite the unprecedented success of GPS, this planning and technical foundation from the 1970s has its own shortcomings in terms of anti-interference, safety and rapid response to constellation abnormal time. Hegarty and Chatre [
6] reports that the US Congress approved a plan in 2000 to establish a new GPS, called GPS III, which would greatly improve civilian and military navigation capabilities. GPS III deploys a signal compatible with other GNSS such as Galileo and BDS at the L1 frequency and is also the fourth generation civil signal, called L1C [
7]. The first satellite of the GPS III was launched in December 2018.
The Quasi-Zenith Satellite System (QZSS) is a Japanese regional satellite positioning system operated by the Japan Aerospace Exploration Agency (JAXA). Take advantage of the high elevation of a highly elliptical orbit, QZSS has been developed as a GPS-complementary system to increase the availability, reliability, integrity and accuracy of positioning performance in the Asia-Oceania region, especially in urban canyons and mountainous areas [
8]. QZS-1, the first satellite of QZSS, is in orbit since 2010. In 2017, Japan launched three satellites to join QZSS, including QZS-2, QZS-3 and QZS-4 [
9,
10], which indicates that it is now feasible to carry out positioning based on QZSS. These four satellites transmit all GPS civil signals since the modernization of GPS, including L1C/A, L1C, L2C and L5 [
11].
IS-GPS-800 [
12] illustrates the L1C signal consisting of data (L1CD) and pilot (L1CP). They are unequally distributed power in 1:3. The novel BOC modulation and TMBOC modulation are used in the GPS III L1C signal, which is virtually seamless interoperability with L1C from QZSS. The navigation message modulated on the L1C signal uses advanced Low Density Parity Check (LDPC) coding, Bose, Chaudhuri, and Hocquenghem (BCH) coding and interleaving to reduce the bit error rate caused by L1CD accounting for 25% of the signal power [
13,
14]. A theoretical research [
15] reports that the new spread spectrum modulation in the pilot component improve the acquisition and tracking performance, especially against interference and noise.
As of May 2019, there are a total of five satellites broadcasting L1C signal in orbit, one of which belongs to GPS III and four of which belong to QZSS. A GPS III satellite with a code number of 4 is called Vespucci. The other four satellites of QZSS called QZS-1, QZS-2, QZS-3, QZS-4 use the code number 193, 194, 199, 195 respectively. It should be noted that QZS-1, the first satellite launched by QZSS, differs from GPS III when it comes to modulation and phase. QZS-1 uses BOC(1,1) modulation for both data and pilot, and its pilot advances data by 90 degrees (in phase quadrature). In GPS III and three other QZSS satellites, L1CD uses BOC(1,1) modulation, and L1CP uses TMBOC(6,1,4/33) modulation. And they are in the same phase. A binary offset carrier modulation with 1.023 MHz spreading code chipping rate and 1.023 MHz square wave subcarrier frequency, sine phased, which is denoted as BOC(1,1). TMBOC(6,1,4/33) is produced by replacing four of each 33 spreading symbols in the pilot component with BOC(6,1) spreading symbols, while retaining BOC(1,1) for all other spreading symbols in the pilot and also for all of the data spreading symbols [
15]. With respect to the satellite orbit, GPS III and QZSS are also different. QZS-1, QZS-2, QZS-4 belong to inclined geo-synchronous satellite orbit (IGSO) satellites, QZS-3 belongs to geostationary Earth orbit (GEO) satellites, and GPS III belongs to medium Earth orbit (MEO) satellites.
The anti-noise, anti-interference and multipath performance of Binary Phase Shifted Keyed (BPSK) and BOC modulation have been evaluated theoretically [
16,
17]. Chen et al. [
18] have verified the ranging performance of BPSK and BOC modulated signal in the open sky and other situations and the results of the evaluation were given. Combined with GPS, Lee et al. [
19] verify that the BOC modulated signal broadcast by QZS-1 has better performance than the BPSK modulated signal in the positioning error. The positioning performance of the Software-defined Receiver (SDR) by means of QZSS has been reported in the literature [
10,
20]. Many studies [
21,
22,
23,
24,
25,
26] use Precise Point Positioning (PPP) for GNSS such as GPS and GLONASS, and analyze the QZSS observations and the positioning effect. However, the effect of the latest L1C signals on positioning results is still lacking. The first satellite launched by GPS III in December 2018 has already broadcast the L1C signal with TMBOC modulation. While the anti-interference, anti-noise and other benefits of the TMBOC over the BOC have been theoretically assessed [
15], no in-orbit, operational assessments have been published.
We have developed methods to make a direct comparison of the ranging difference of TMBOC(6,1,4/33) and BOC(1,1) from GPS III and QZSS. In view of the fact that there is barely one satellite in the current GPS III constellation, we propose a joint positioning method to use GPS III for positioning service, and verify its feasibility by means of the experiment in Xi’an. The ideal way to make a direct comparison of anti-interference and anti-noise performance is to use TMBOC(6,1,4/33) and BOC(1,1)-modulated signals emanating from the same constellation geometry. The use of satellites of the same time period rather than the two periods of close proximity is the key to accurate comparison as the ranging and positioning results are sensitive to the slightest difference in the constellation geometry. Therefore, the experiments in Sanya made a detailed comparison of positioning error between the TMBOC(6,1,4/33) and BOC(1,1) modulated signals of GPS III + QZSS and QZSS-only.
2. Receiving and Evaluation Methodology
We used static test equipment shown in
Figure 1 to collect signals in Xi’an and Sanya, China, which will be introduced later. The extremely high sampling rate of 250 MHz and the 80MHz bandwidth of the front-end filter meet the ultra-narrow correlation proposed by Liu and Amin [
27]. Based on the SDR designed by Kai Borre [
28], we designed a new SDR, called GNSS Receiver, uses the L1C signal transmitted on GPS III and QZSS to processing off-line and takes into account multiple differences in their signal structure defined in these documents [
3,
11,
12].
Figure 2 is the flow chart of tracking algorithm in GNSS Receiver. Many of its receive-related parameters are flexible and adjustable, including correlator spacing, bandwidth and damping factor for Delay Lock Loop (DLL) and Phase Lock Loop (PLL). The local signal generated by GNSS Receiver for tracking is full bandwidth unfiltered. The tracking method of GNSS Receiver uses Bump-Jump proposed by Fine and Wilson [
29], and the five pairs of correlators independently demodulate the data component and the pilot component by a coherent integration of 1 ms. The squaring operation of the non-coherent integration destroys the zero-mean of the thermal noise and brings about the squaring loss, so it is not used. Continuously tracking the carrier frequency and code phase of the L1CD demodulates the navigation massage bit stream, and GNSS Receiver demodulates the overlay code by tracking L1CP. GNSS Receiver uses the overlay code to complete the frame synchronization of the navigation message [
30,
31]. Pseudorange measurements of GNSS Receiver can be selected in TMBOC(6,1,4/33) ranging and BOC(1,1) ranging.
Figure 3 is the flow chart of the ranging and positioning after tracking algorithm. For joint positioning, the ephemeris needs to be modified in the algorithm to ensure that the orbit is correctly calculated.
Concerning the reception performance, the BOC(1,1) and TMBOC(6,1,4/33) modulations used in the L1C signal are better improved [
32,
33]. Their auto-correlation function is shown in
Figure 4. The auto-correlation function of TMBOC(6,1,4/33) is sharper than BOC(1,1) in several intervals, including 0–1/12 chips, 1/6–1/4 chips which is helpful to improve the reception of TMBOC (6,1,4/33). Therefore, the choice of correlator spacing is considered when using a software-defined receiver for ranging and positioning, which will be discussed later.
Chen et al. [
18] have demonstrated that setting different correlator spacing has different effects on tracking accuracy. A non-coherent early–late discriminator is used in GNSS Receiver. Assuming the use of a locally generated replica is identical to the unfiltered received signal, the theoretical code-tracking error variance caused by thermal noise [
34,
35] is given by:
where the meaning of all symbols is shown in
Table A1.
The code-tracking error for BOC(1,1) and TMBOC(6,1,4/33) using different correlator spacing is shown in
Figure 5. Theoretically, the loop tracking error of BOC(1,1) increases with the correlator spacing. In the sharper range of the TMBOC(6,1,4/33) autocorrelation function reflected in
Figure 1, TMBOC(6,1,4/33) tracking is more accurate than BOC(1,1).
Since the signal is processed off-line, the time when GNSS Receiver acquires the satellites cannot be obtained. Therefore, the duration of satellites signals transmission cannot be calculated by GNSS Receiver. So the pseudorange is obtained by the relative measurement between satellites. GNSS Receiver takes the reception time of the common frame as a reference edge without considering the satellite clock error.
where the meaning of all symbols is shown in
Table A2.
Considering the satellite clock error decoded from the message, the pseudorange equation of a single satellite in a single frequency SDR [
36] is written as
where the meaning of all symbols is shown in
Table A3.
For a single satellite, single frequency, zero baseline differential receiver, the pseudorange difference equation is
where the meaning of all symbols is shown in
Table A4.
For each channel where the correlator spacing is fixed, the clock error, ionosphere and tropospheric error are a common mode in the pseudorange difference equation and are therefore removed in the equation. The noise can be effectively removed with an average. In the experimental situation below, the main residual multipath, signal nominal deformation and DLL noise are all relevant to the correlation spacing. The user receivers use different correlator spacing, including 0.125 chips, 0.15 chips, 0.175chips, 0.2 chips, 0.25 chips, 0.3 chips, 0.35 chips, 0.4 chips, which are differentiated from reference receiver with a correlator spacing of 0.05 chips. The correlator spacing dependent errors were obtained for all the satellites.
We use zero baseline proposed by de Bakker et al. [
37] difference to illustrate the positioning errors of the user receivers from the reference receiver.
where the meaning of all symbols is shown in
Table A5.
Under some preconditions, the zero baseline difference can reflect the error caused by the user receiver using different correlator spacing. First, the user receivers and the reference receiver use the same satellite constellation. Second, they must use the same satellites signals. Third, their positioning algorithm must be the same. Provided that the above necessary conditions are met, the zero baseline difference can reflect the positioning error associated with the correlator spacing as same as the ranging difference. The quantitative expression of ranging difference and positioning error is as follows
where the meaning of all symbols is shown in
Table A6.
3. Measurement Campaign
QZSS satellites have an elliptical geosynchronous orbit which allows them to spend a significant portion of their orbital period visible to East Asia. They provide ever-present high elevation navigation signals for places such as Japan, Korea, Australia or eastern China. As of May 2019, Vespucci is in medium earth orbit and its surrounding cycle is about 12 h, making it not visible at any time in the collection site. In southern China, Vespucci can be observed at a higher elevation.
The skyplot for a user in Xi’an (34°8′ N, 108°59′ E), China is shown in
Figure 6. In Xi’an, the elevations of QZS-1, QZS-2, QZS-4 are sometimes less than 10 degrees or even invisible. The elevation of each satellite is greater than 10 degrees for some duration, which is approximately 18 h. Meanwhile, QZS-3 is always at about 46 degrees. Vespucci has a total of 8 h of elevation above 10 degrees for two periods. The trend of the elevation of Vespucci is always opposite to that of a satellite in QZSS. It should be noted that the SDR cannot use the constellation with less than four visible satellites for positioning measurement.
The signal collection site is located on the 1st-floor roof of the National Time Service Center (NTSC) of the Chinese Academy of Sciences. The position where the omnidirectional antenna was placed is shown in
Figure 7. Although only four satellites are visible in Xi’an, they can be used to verify the optimization of joint positioning on GPS III + QZSS constellations.
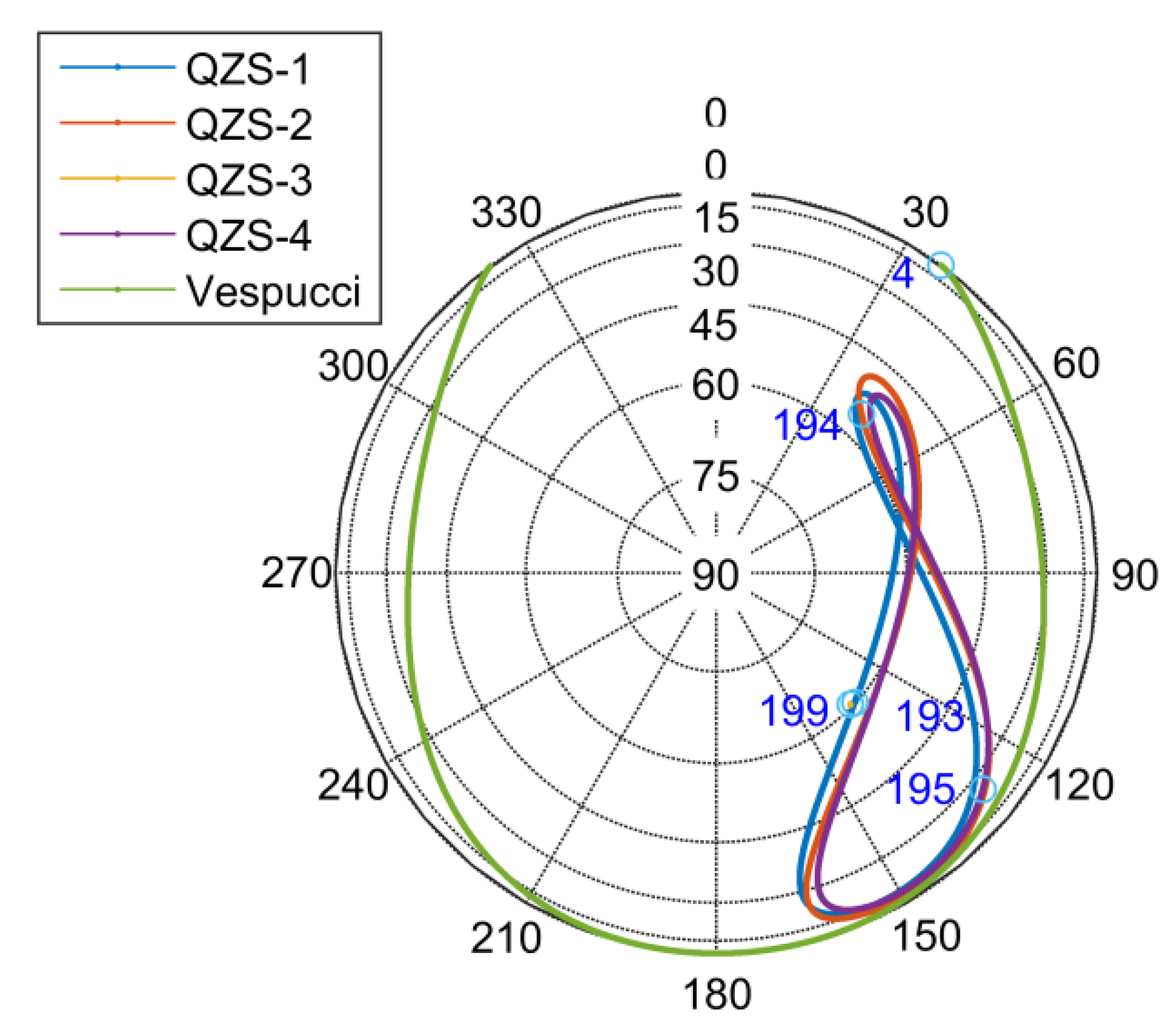
Since Sanya is in southern China, the elevation of satellites of QZSS and Vespucci of GPS III are several degrees higher than those of Xi’an. The skyplot for a user in Sanya (18°18′ N, 109°15′ E), China observing GPS III and QZSS orbits is shown in
Figure 8. At Sanya, the satellites of QZSS is always visible and always significantly above 10 degrees elevation. Vespucci of GPS III is greater than 0 degrees about 12 h. As shown in
Figure 8, most of the dwell time, QZSS is at high elevation that greater than 45 degrees (~15 h). But the trend of the elevation of Vespucci is always opposite to that of a satellite in QZSS, which is the same as in the Xi’an constellation. The signal collected in Sanya also using the test equipment. If the constellation contains satellites with an elevation below 10 degrees, the positioning results will get tremendous deterioration [
38]. So satellites collected below 10 degrees should be avoided.
The location at the hotel building by the sea was used for the signal collection. To receive GPS III and QZSS satellites signals, an omnidirectional antenna was placed on the third-floor balcony, as shown in
Figure 9. We analyze the signal collected in Sanya at UTC 12:08:10, 13 April 2019. The skyplot of the satellites visible in the course of the signal collection is shown in
Figure 10. As seen in the skyplot, GPS III and QZSS satellites are at high elevation and their direct signals could be visible at the balcony location.
5. Conclusions
The transmission of the new navigation signal leads to the need to verify its performance in ranging and positioning. We propose a method for SDR to use L1C signal for ranging and joint positioning. The evaluation methodology is also proposed for the results using in-orbit signals. The comparison of ranging difference between BOC(1,1) and TMBOC(6,1,4/33) transmitted by GPS III and QZSS is given. The results from GPS III and QZSS demonstrate that the ranging performance of TMBOC(6,1,4/33) has better than BOC(1,1) but the choice of correlator spacing needs to be considered. The poor selection of correlator spacing will result in worse ranging performance for TMBOC(6,1,4/33).
The experiment of Xi’an adopted the L1C signal transmitted by the first GPS III satellite, Vespucci, to verify the positioning performance. The joint positioning results prove that the QZSS L1C signal has the claimed enhancement and supplement effect on GPS. We give a direct comparison of GPS III + QZSS joint positioning vs. QZSS-only using in-orbit signals collected in Sanya. Due to the optimization of the constellation configuration, the positioning error of joint positioning is reduced. Meanwhile, the positioning results using different correlator spacing verify that the ranging difference of TMBOC(6,1,4/33) caused by the poor correlator spacing will affect the positioning result. But properly selecting the correlator spacing allows the positioning performance of TMBOC(6,1,4/33) outperforms that of BOC(1,1).

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}























