Discrete Sliding Mode Speed Control of Induction Motor Using Time-Varying Switching Line



Abstract
:1. Introduction
- -
- Application of the discrete-time sliding mode control concept presented in [17] to obtain chattering-free control of induction motor speed.
- -
- Extending the reaching law of [17] with the idea of the time-varying switching line to obtain robustness of the whole drive operation over parametric and external disturbances. In this paper the robustness is defined as ensuring identical dynamical transients of the controlled variable. The switching line is supposed to move from initial to the final position with a constant, shifting movement.
2. Mathematical Models of Induction Motor
2.1. Continuous Time-Domain Mathematical Model
- –
- Stator and rotor voltage equations (Ur = 0 for a squirrel-cage IM):
- –
- Stator and rotor flux-current equations:
- –
- IM torque expression:
- –
- Equation of motion:
- –
- Rotor position equation:
2.2. Discrete Time-Domain Mathematical Model of Induction Motor
3. Discrete Time Sliding Mode Control of Induction Motor Speed
3.1. Discrete Sliding Mode Control of Induction Motor Speed
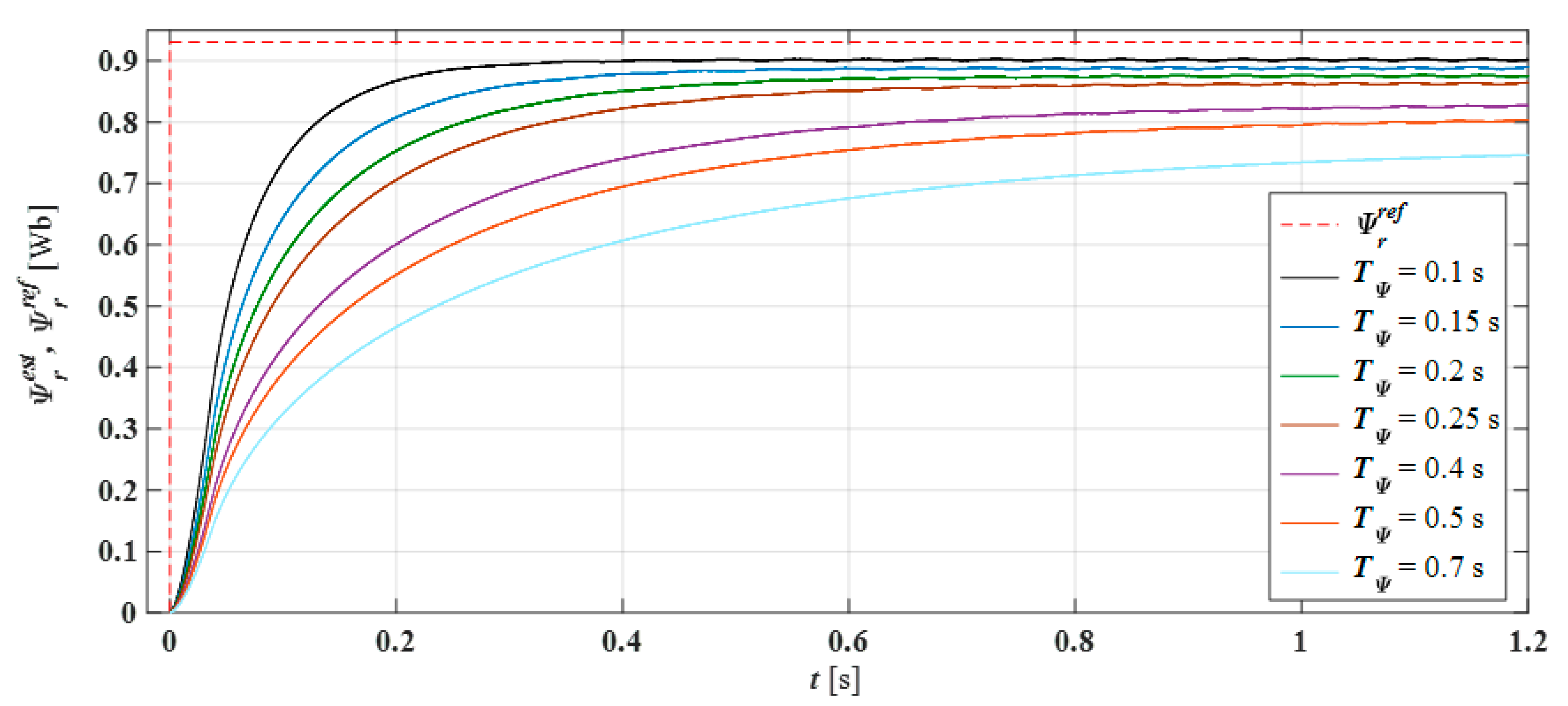
3.2. Discrete-Time Rotor Flux Amplitude Control
3.2.1. IM Model-Based Flux Control
3.2.2. Proportional–Integral (PI) Regulator Based Control
3.3. Discrete-Time Sliding Mode Control of Stator Current Vector Components
3.4. Time-Varying Switching Line
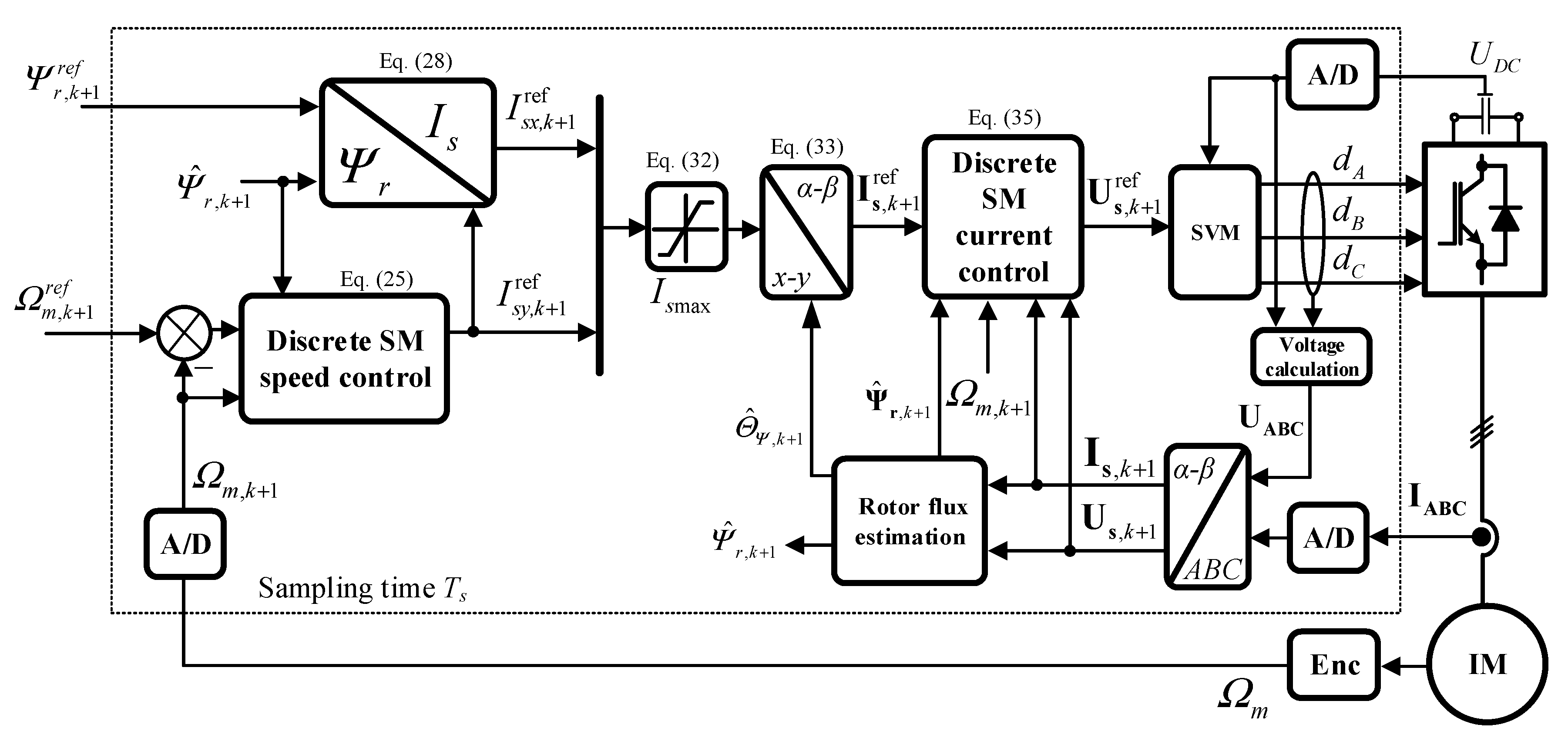
3.5. Overall Control Structure
4. Simulation Results
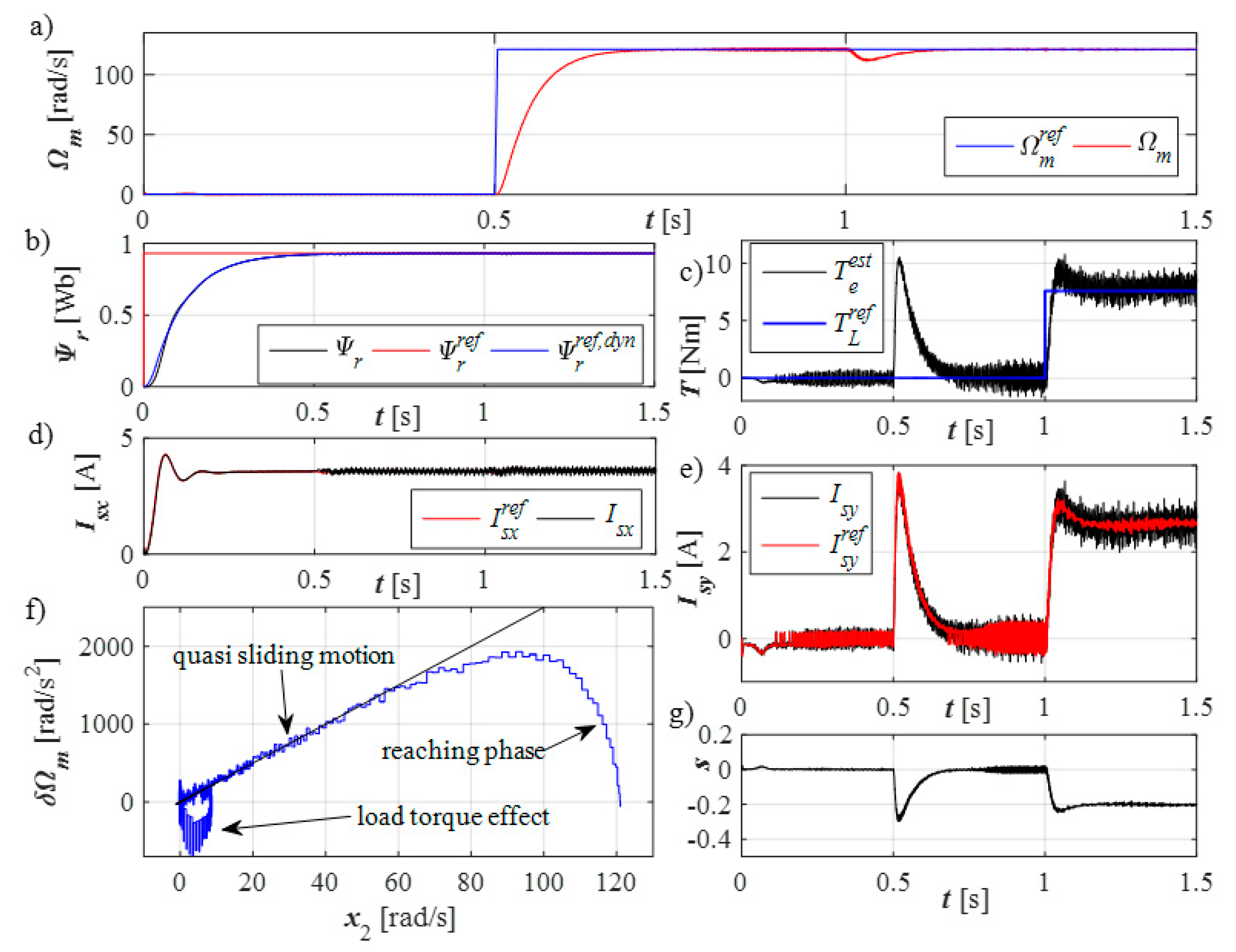
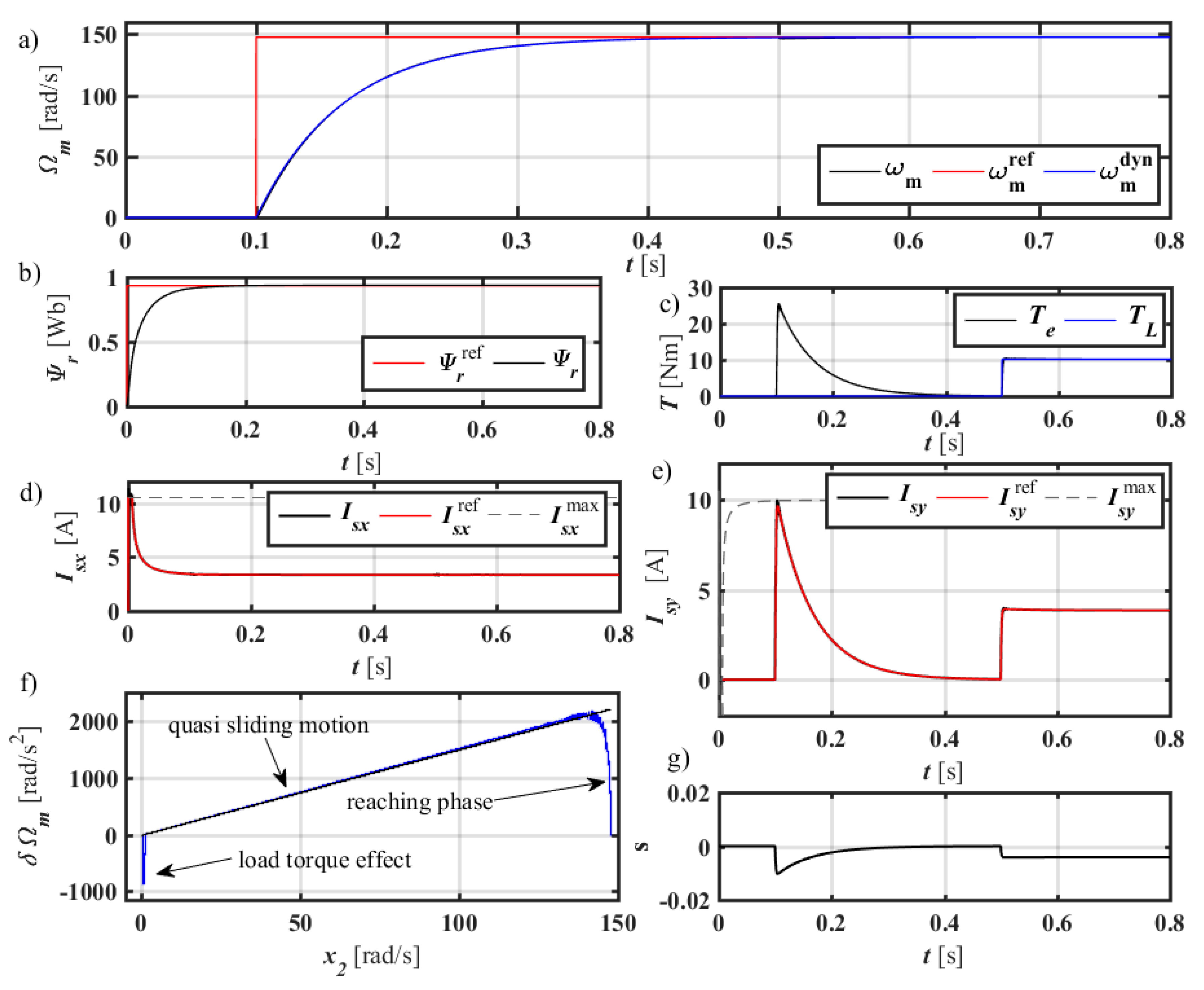
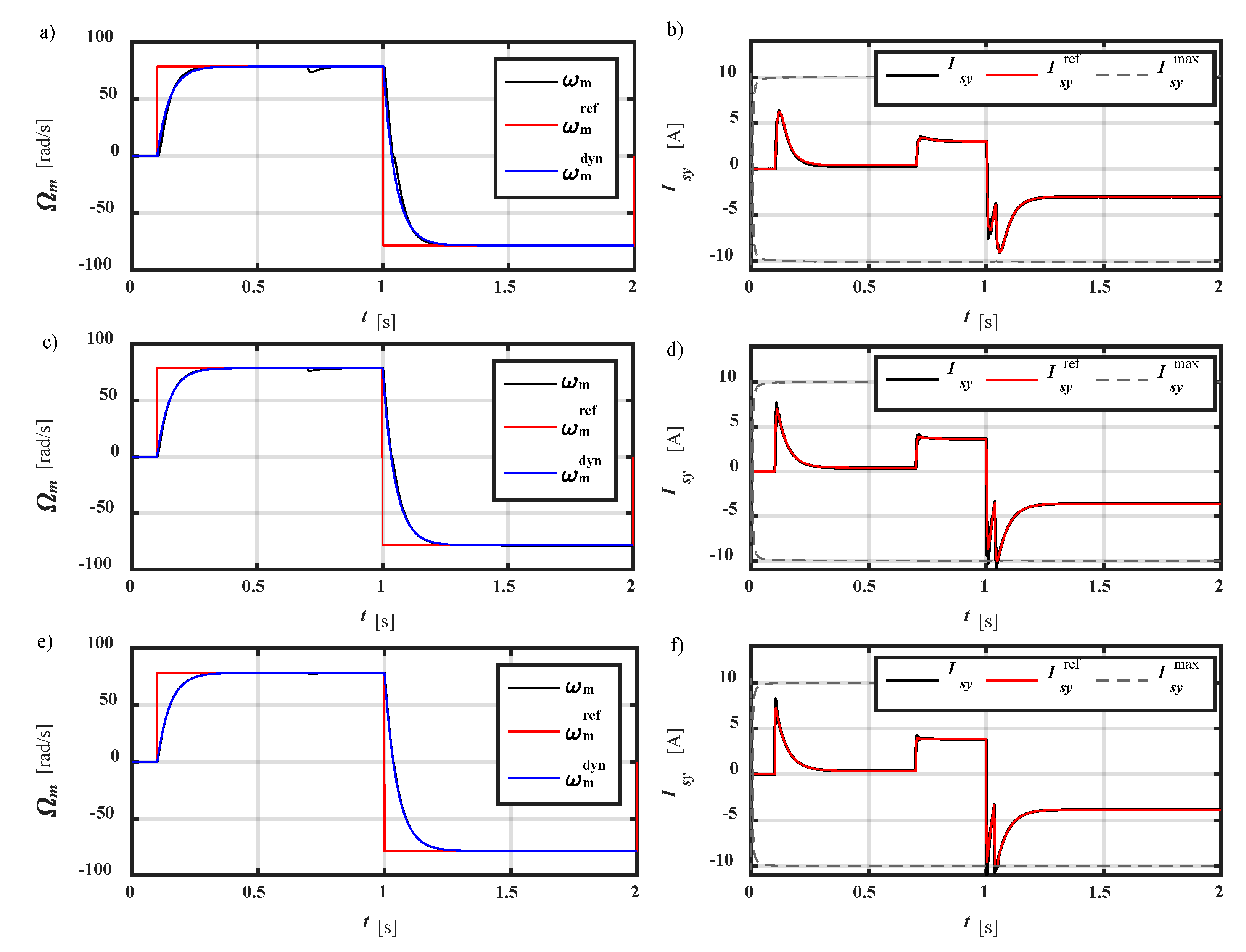
4.1. Performance of the Control Structure
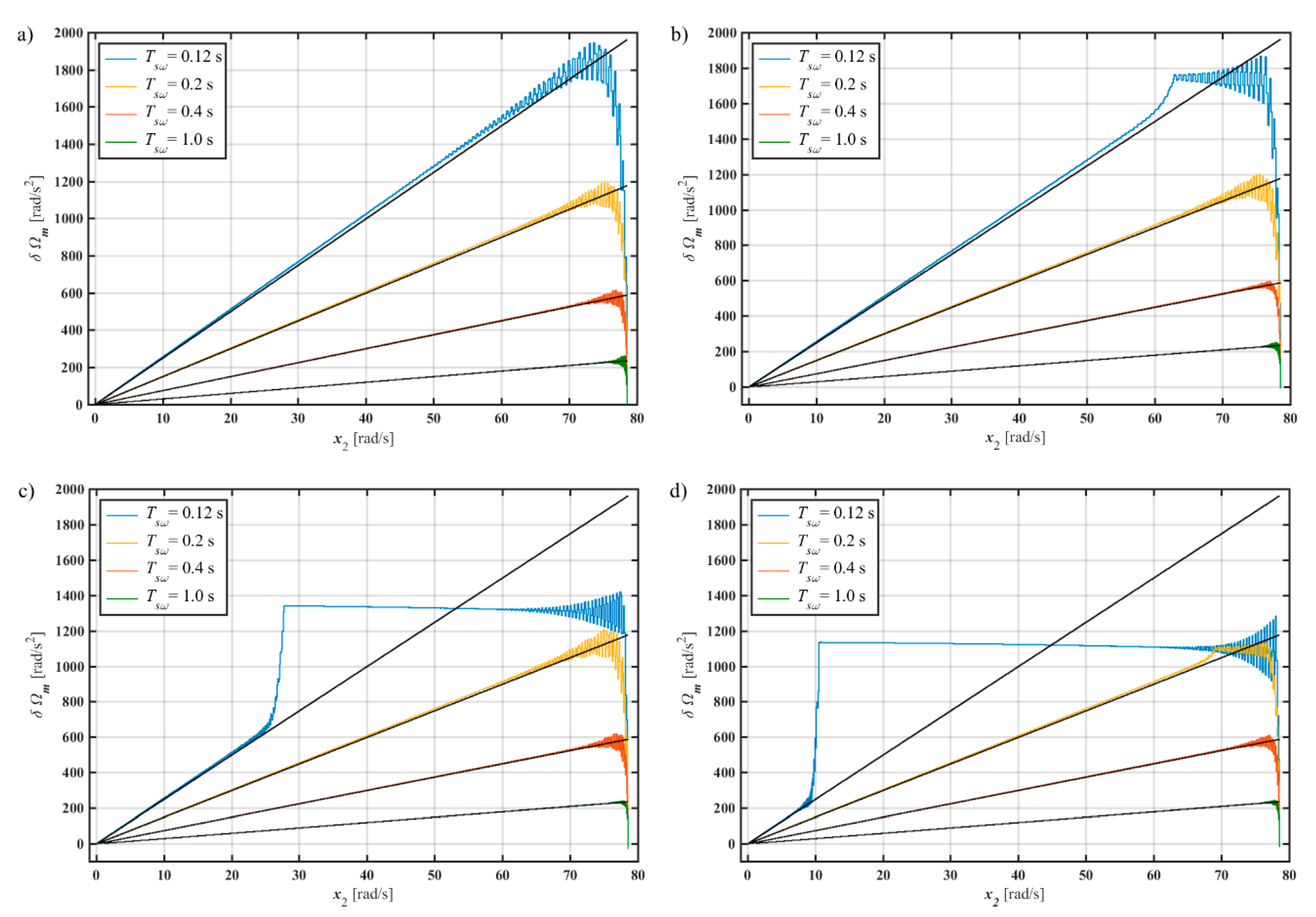
4.2. Influence of the Sampling Time
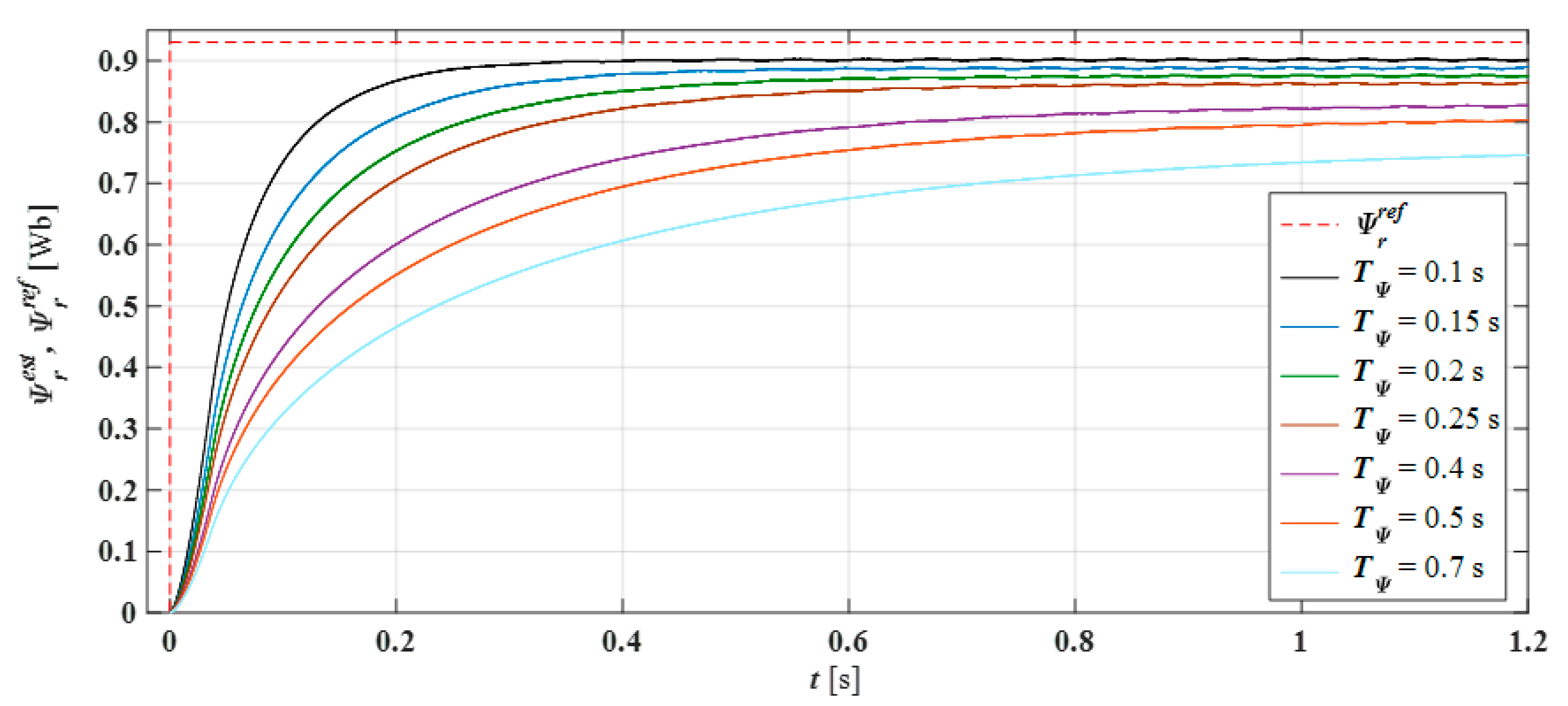
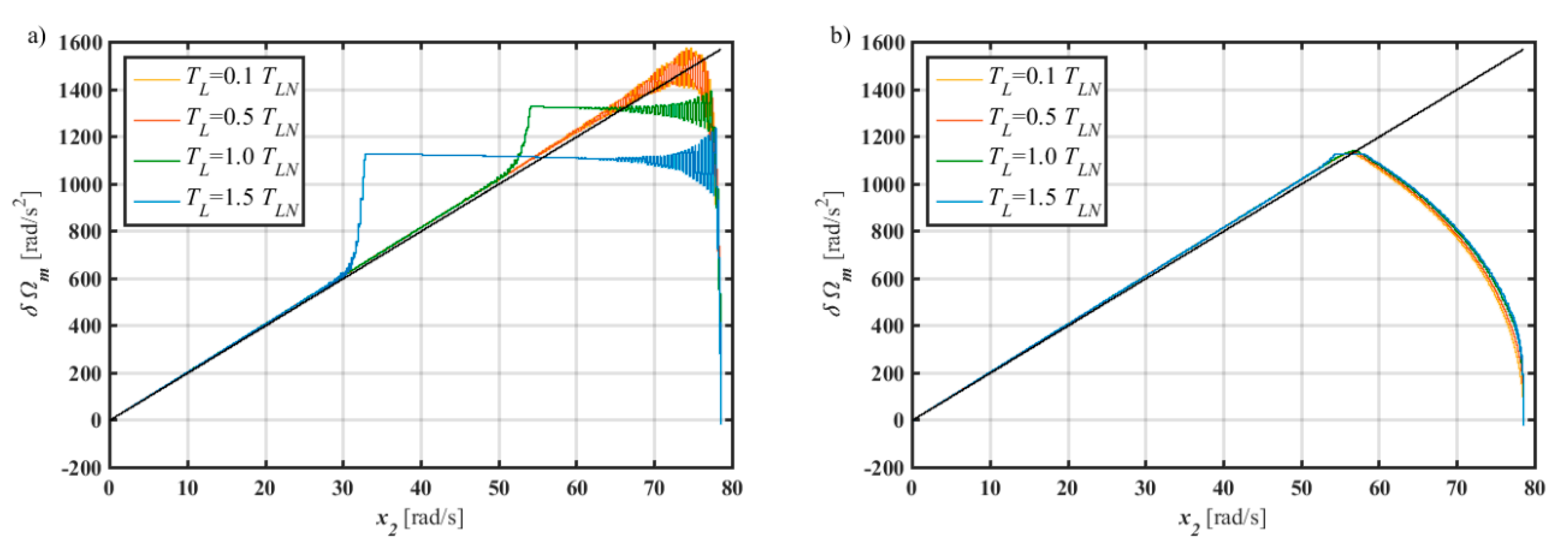
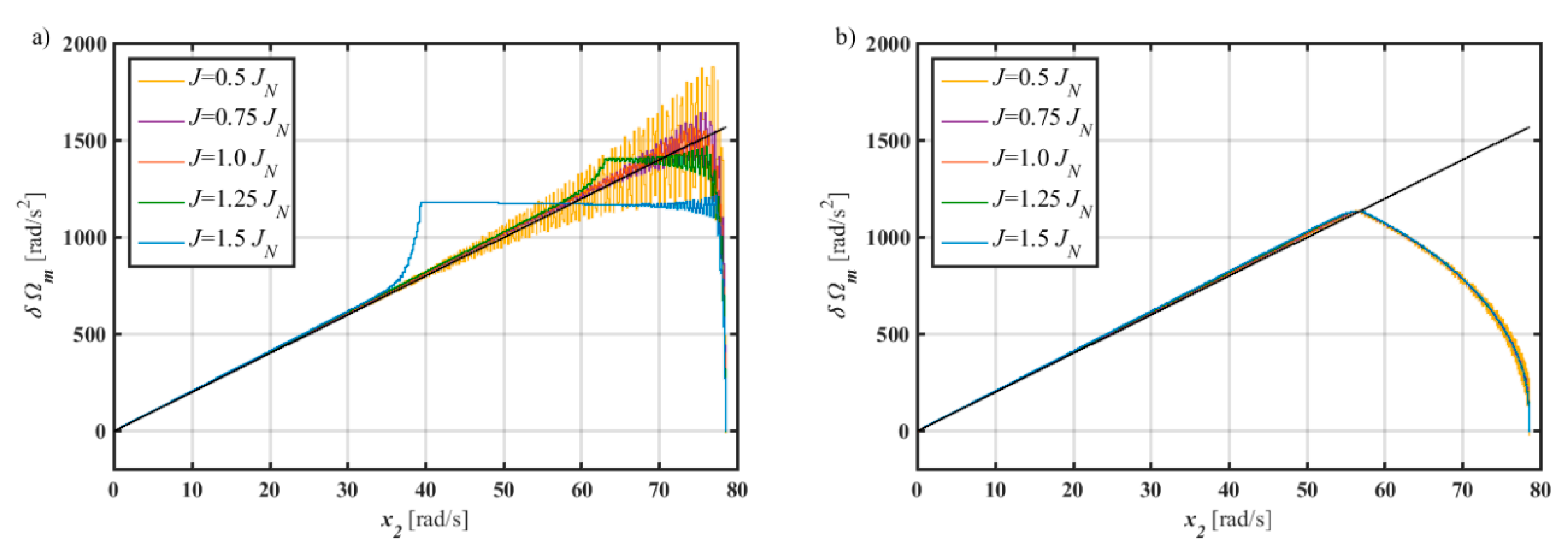
4.3. Time-Varying Switching Time
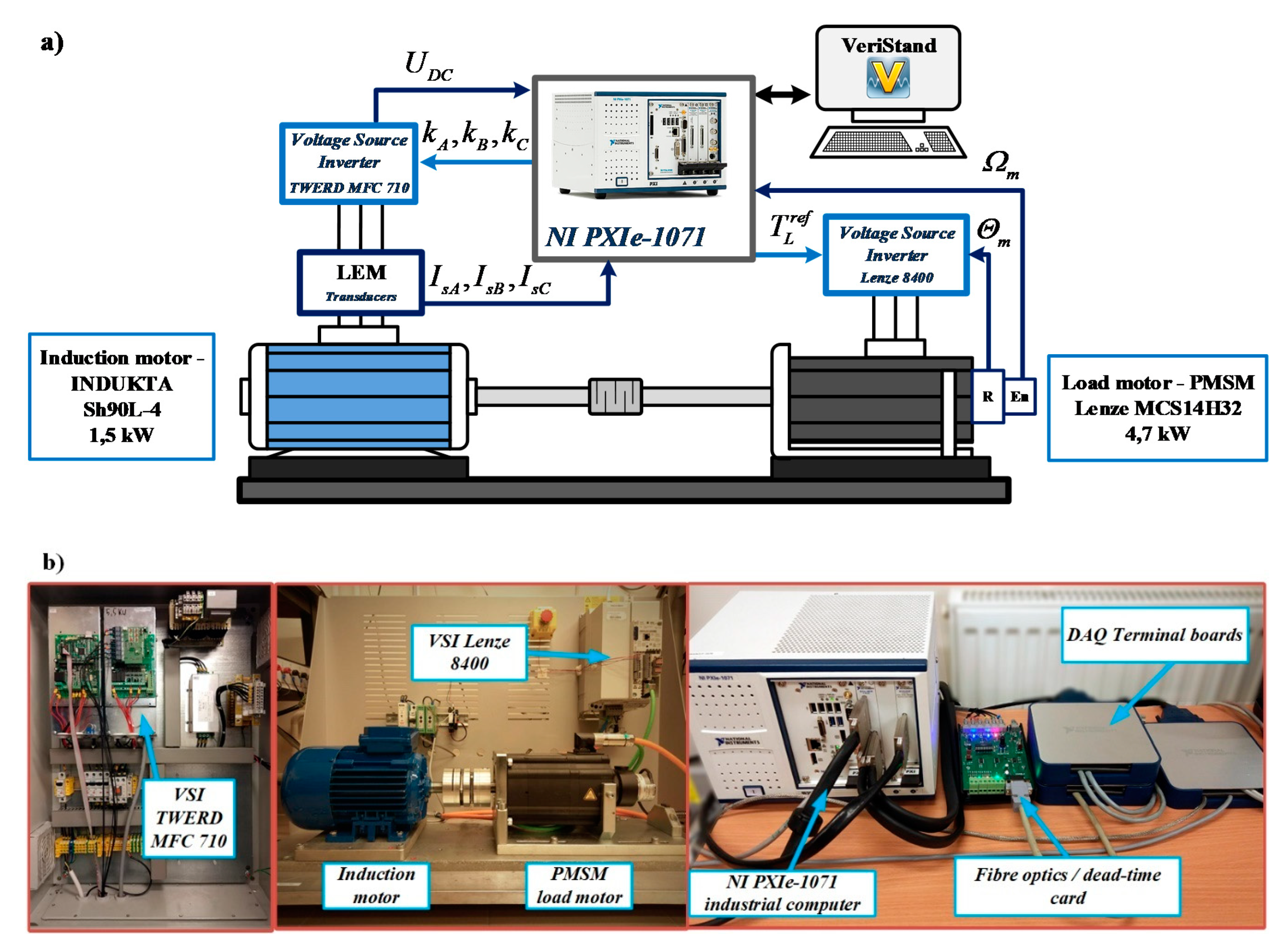
5. Experimental Tests
5.1. Experimental Setup
5.2. Experimental Test Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value [Ph. U.] |
|---|---|
| Nominal power | PN = 1.5 [kW] |
| Nominal torque | TN = 10.16 [Nm] |
| Nominal voltage | UN = 400 [V] |
| Nominal current | IN = 3.4 [A] |
| Nominal speed | nN = 1410 [rpm] |
| Main inductance | Lm = 424.6 [mH] |
| Stator/rotor leakage inductance | Lsσ = Lrσ = 17.3 [mH] |
| Stator resistance | Rs = 5.307 [Ω] |
| Rotor resistance | Rr = 4.843 [Ω] |
| Rotor flux | Ψr = 0.93 [Wb] |
| Nominal stator frequency | fsN = 50 [Hz] |
| Pair of poles | pb = 2 |
| Moment of inertia | JN = 0.0117 [kg m2] |
References
- Yu, X.; Kaynak, O. Sliding-Mode Control with Soft Computing: A Survey. IEEE Trans. Ind. Electron. 2009, 56, 3275–3285. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Lascu, C.; Trzynadlowski, A.M. Combining the principles of sliding mode, direct torque control, and space-vector modulation in a high-performance sensorless AC drive. IEEE Trans. Ind. Appl. 2004, 40, 170–177. [Google Scholar] [CrossRef]
- Sabanovic, A. Variable Structure Systems with Sliding Modes in Motion Control—A Survey. IEEE Trans. Ind. Inform. 2011, 7, 212–223. [Google Scholar] [CrossRef]
- Panchade, V.M.; Chile, R.H.; Patre, B.M. A survey on sliding mode control strategies for induction motors. Annu. Rev. Control 2013, 37, 289–307. [Google Scholar] [CrossRef]
- Utkin, V.; Lee, H. Chattering problem in sliding mode control systems. In Proceedings of the International Workshop on Variable Structure Systems, Alghero, Italy, 5–7 June 2006; pp. 346–350. [Google Scholar]
- Castillo-Toledo, B.; Di Gennaro, S.; Loukianov, A.G.; Rivera, J. Discrete time sliding mode control with application to induction motors. Automatica 2008, 44, 3036–3045. [Google Scholar] [CrossRef]
- Castillo-Toledo, B.; Di Gennaro, S.; Galicia, M.I.; Loukianov, A.G.; Rivera, J. Indirect discrete-time sliding mode torque control of induction motors. In Proceedings of the XIX International Conference on Electrical Machines (ICEM), Rome, Italy, 6–8 September 2010. [Google Scholar]
- Quintero-Manriquez, E.; Sanchez, E.N.; Felix, R.A. Induction Motor Torque Control via Discrete-Time Sliding Mode. In Proceedings of the 16 International Joint Conference on Neural Networks, (IJCNN), Rio Grande, Puerto Rico, 31 July–4 August 2016; pp. 2756–2761. [Google Scholar]
- Tarchala, G. Discrete Sliding Mode Control of Induction Motor Torque and Stator Current Components. In Proceedings of the 18th IEEE International Power Electronics and Motion Control Conference (PEMC), Budapest, Hungary, 26–30 August 2018; pp. 675–680. [Google Scholar]
- Chern, T.L.; Liu, C.S.; Jong, C.F.; Yan, G.M. Discrete integral variable structure model following control for induction motor drivers. IEE Proc.-Electr. Power Appl. 1996, 143, 467–474. [Google Scholar] [CrossRef]
- Veselic, B.; Perunicic-Drazenovic, B.; Milosavljevic, C. High-Performance Position Control of Induction Motor Using Discrete-Time Sliding-Mode Control. IEEE Trans. Ind. Electron. 2008, 55, 3809–3817. [Google Scholar] [CrossRef]
- Veselic, B.; Perunicic-Drazenovic, B.; Milosavljevic, C.B. Improved Discrete-Time Sliding-Mode Position Control Using Euler Velocity Estimation. IEEE Trans. Ind. Electron. 2010, 57, 3840–3847. [Google Scholar] [CrossRef]
- Sarpturk, S.Z.; Istefanopulos, Y.; Kaynak, O. On the stability of discrete-time sliding mode control systems. IEEE Trans. Autom. Control 1987, 32, 930–932. [Google Scholar] [CrossRef]
- Furuta, K. Sliding mode control of a discrete system. Syst. Control Lett. 1990, 14, 145–152. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. Non-linear discrete variable structure systems in quasi-sliding mode. Int. J. Control 1991, 54, 1171–1187. [Google Scholar] [CrossRef]
- Golo, G.; Milosavljević, Č. Robust discrete-time chattering free sliding mode control. Syst. Control Lett. 2000, 41, 19–28. [Google Scholar] [CrossRef]
- Choi, S.B.; Park, D.W.; Jayasuriya, S. A time-varying sliding surface for fast and robust tracking control of second-order uncertain systems. Automatica 1994, 30, 899–904. [Google Scholar] [CrossRef]
- Bartoszewicz, A. A time-varying sliding surface for fast and robust tracking control of second-order uncertain systems—A comment. Automatica 1995, 31, 893–1895. [Google Scholar] [CrossRef]
- Corradini, M.L.; Orlando, G. Linear unstable plants with saturating actuators: Robust stabilization by a time varying sliding surface. Automatica 2007, 43, 88–94. [Google Scholar] [CrossRef]
- Bartoszewicz, A.; Nowacka, A. Optimal design of the shifted switching planes for VSC of a third-order system. Trans. Inst. Meas. Control 2006, 28, 335–352. [Google Scholar] [CrossRef]
- Lesniewski, P. Sliding mode control with time-varying sliding hyperplanes: A survey. In Proceedings of the 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; pp. 81–86. [Google Scholar]
- Betin, F.; Capolino, G.A. Sliding mode control for an induction machine submitted to large variations of mechanical configuration. Int. J. Adapt. Contr. Sign. Proc. 2007, 21, 745–763. [Google Scholar] [CrossRef]
- Chen, Z.M.; Zhang, J.G.; Zeng, J.C. A new method of sliding mode control and application to AC servo system. In Proceedings of the 5th International Conference Electrical Machines and Systems (ICEMS), Shenyang, China, 18–20 August 2001; pp. 759–762. [Google Scholar]
- Pang, H.-P.; Liu, C.-J.; Zhang, W. Sliding mode fuzzy control with application to electrical servo drive. In Proceedings of the 6th International Conference Intelligent Systems Design and Applications (ISDA), Jinan, China, 16–18 October 2006; pp. 320–325. [Google Scholar]
- Tarchala, G. Sliding mode speed control of an induction motor drive using time-varying switching line. Power Electron. Drives 2017, 2, 1310–1315. [Google Scholar] [CrossRef]
- Bartoszewicz, A. Discrete-time quasi-sliding-mode control strategies. IEEE Trans. Ind. Electron. 1998, 45, 633–637. [Google Scholar] [CrossRef]
- Hu, Q.; Du, C.; Xie, L.; Wang, Y. Discrete-time sliding mode control with time-varying surface for hard disk drives. IEEE Trans. Control Syst. Technol. 2008, 17, 175–183. [Google Scholar] [CrossRef]
- Kanai, Y.; Mori, Y. Discrete time sliding mode control with time varying switching hyper plane. In Proceedings of the 2008 SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; pp. 2349–2352. [Google Scholar]
- Komurcugil, H. Rotating-sliding-line-based sliding-mode control for single-phase UPS inverters. IEEE Trans. Ind. Electron. 2011, 59, 3719–3726. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y.; Chen, Z.; Zhao, Z. A control scheme based on discrete time-varying sliding surface for position control systems. In Proceedings of the 5th Congress on Intelligent Control and Automation (WCICA), Hangzhou, China, 15–19 June 2004; pp. 1175–1178. [Google Scholar]
- Bayindir, M.I.; Can, H.; Akpolat, Z.H.; Ozdemir, M.; Akin, E. Robust quasi-time-optimal discrete-time sliding mode control of a servomechanism. Electr. Power Compon. Syst. 2007, 35, 885–905. [Google Scholar] [CrossRef]
- Sharma, N.K.; Roy, S.; Janardhanan, S. New design methodology for adaptive switching gain based discrete-time sliding mode control. Int. J. Control 2019. [Google Scholar] [CrossRef] [Green Version]
- Sharma, N.K.; Roy, S.; Janardhanan, S.; Kar, I.N. Adaptive Discrete-Time Higher Order Sliding Mode. IEEE Trans. Circuits Syst. II Express Br. 2019, 66, 612–616. [Google Scholar] [CrossRef]
- Kazmierkowski, M.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics—Selected Problems; Academic Press—An imprint of Elsevier Science: Cambridge, MA, USA, 2002; p. 250. [Google Scholar]
- Tarchala, G. Influence of the stator current approximation form on the discrete sliding mode torque control for induction motor drive. In Proceedings of the 9th Joint Slovakian-Croatian International Conference on Electrical Drives & Power Electronics (EDPE), Novy Smokovec, Slovakia, 24–26 September 2019; pp. 66–73. [Google Scholar]



© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tarchała, G.; Orłowska-Kowalska, T. Discrete Sliding Mode Speed Control of Induction Motor Using Time-Varying Switching Line. Electronics 2020, 9, 185. https://doi.org/10.3390/electronics9010185
Tarchała G, Orłowska-Kowalska T. Discrete Sliding Mode Speed Control of Induction Motor Using Time-Varying Switching Line. Electronics. 2020; 9(1):185. https://doi.org/10.3390/electronics9010185
Chicago/Turabian StyleTarchała, Grzegorz, and Teresa Orłowska-Kowalska. 2020. "Discrete Sliding Mode Speed Control of Induction Motor Using Time-Varying Switching Line" Electronics 9, no. 1: 185. https://doi.org/10.3390/electronics9010185
APA StyleTarchała, G., & Orłowska-Kowalska, T. (2020). Discrete Sliding Mode Speed Control of Induction Motor Using Time-Varying Switching Line. Electronics, 9(1), 185. https://doi.org/10.3390/electronics9010185