Non-Uniform Discretization-based Ordinal Regression for Monocular Depth Estimation of an Indoor Drone


Abstract
:1. Introduction
- We propose a non-uniform spacing-increasing discretization (NSID) strategy to discretize the distance labels of the data set, obtained by self-supervising. Three areas—a dangerous area, a decision area, and a safe area—are discretized by the NSID strategy. The evaluation of the strategy is shown in Section 4.2.
- The monocular depth estimation of indoor drone problems is converted into an ordinal regression problem. Images obtained by the camera are the input of the model, and distance labels are the output. To the best of our knowledge, this is the first work that uses ordinal regression to solve monocular depth estimation for an indoor drone.
- In order to solve the problem of the inconsistency of ordinal regression, a new distance decoder with penalty coefficients is proposed.
2. Related Work
2.1. Monocular Depth Estimation for Drones
2.2. Ordinal Regression for Vision Based on Deep Learning
2.3. Ordinal Regression for a Monocular Indoor Drone
3. Methodology
3.1. Discretization Strategy
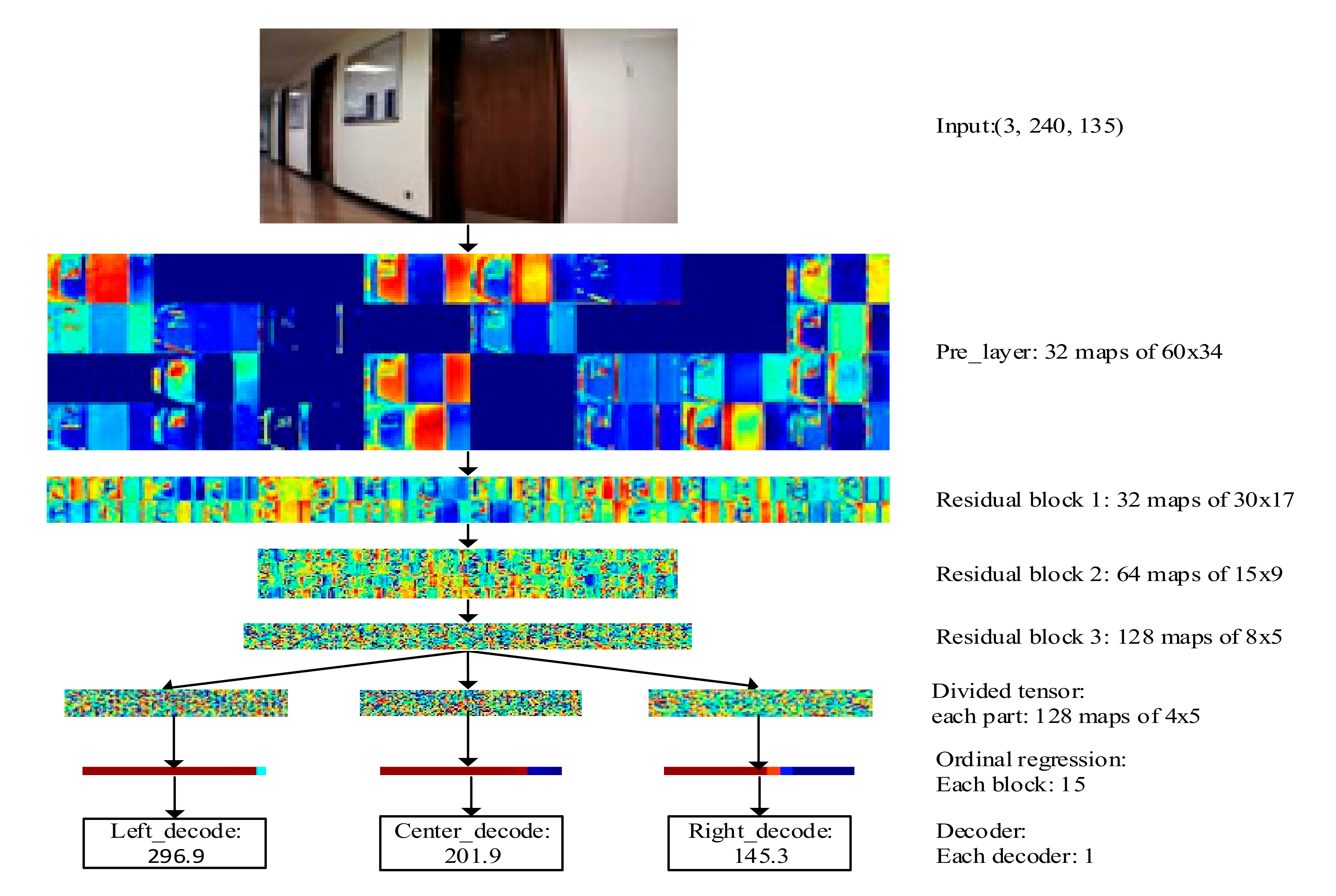
3.2. Network Structure
3.3. Training
4. Analysis of Experiments
4.1. Data Set
4.2. The Overall Performance Comparison
4.3. Choice of the Number of Discrete Intervals in the Estimation Model
4.4. Performance Comparison of Decoders
4.5. Depth Predicetion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Deng, C.; Wang, S.; Huang, Z.; Tan, Z.; Liu, J. Unmanned aerial vehicles for power line inspection: A cooperative way in platforms and communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.H. Improvement in Target Range Estimation and the Range Resolution Using Drone. Electronics 2020, 9, 1136. [Google Scholar] [CrossRef]
- Choi, S.Y.; Cha, D. Unmanned aerial vehicles using machine learning for autonomous flight. Adv. Robot. 2019, 33, 265–277. [Google Scholar] [CrossRef]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A review of deep learning methods and applications for unmanned aerial vehicles. J. Sens. 2017, 2017, 3296874. [Google Scholar] [CrossRef]
- Scherer, S.A.; Zell, A. Efficient onbard RGBD-SLAM for autonomous MAVs. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–8 November 2013; pp. 1062–1068. [Google Scholar]
- Mei, C.; Sibley, G.; Cummins, M.; Newman, P.; Reid, I. RSLAM: A System for Large-Scale Mapping in Constant-Time using Stereo. Int. J. Comput. Vis. 2011, 94, 198–214. [Google Scholar] [CrossRef] [Green Version]
- Checchin, P.; Gerossier, F.; Blanc, C.; Chapuis, R.; Trassoudaine, L. Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2009; pp. 151–161. [Google Scholar]
- Shen, S.; Mulgaonkar, Y.; Michael, N.; Kumar, V. Multi-sensor fusion for robust autonomous flight in indoor and outdoor environments with a rotorcraft mav. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4974–4981. [Google Scholar]
- Alvarez, H.; Paz, L.; Sturm, J.; Cremers, D. Collision avoidance for quadrotors with a monocular camera. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 109, pp. 195–209. [Google Scholar]
- Daftry, S.; Zeng, S.; Khan, A.; Dey, D.; Melik-Barkhudarov, N.; Bagnell, J.A.; Hebert, M. Robust monocular flight in cluttered outdoor environments. arXiv 2016, arXiv:1604.04779. [Google Scholar]
- De Croon, G.; de Wagter, C. Challenges of Autonomous Flight in Indoor Environments. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1003–1009. [Google Scholar]
- Kouris, A.; Bouganis, C.-S. Learning to Fly by MySelf: A Self-Supervised CNN-based Approach for Autonomous Navigation. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Meng, K.; Li, D.; He, X.; Liu, M.; Song, W. Real-Time Compact Environment Representation for UAV Navigation. Sensors 2020, 20, 4976. [Google Scholar] [CrossRef] [PubMed]
- Ross, S.; Melik-Barkhudarov, N.; Shankar, K.S.; Wendel, A.; Dey, D.; Bagnell, J.A.; Hebert, M. Learning monocular reactive uav control in cluttered natural environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 1765–1772. [Google Scholar]
- Kim, D.K.; Chen, T. Deep neural network for real-time autonomous indoor navigation. arXiv 2015, arXiv:1511.04668. [Google Scholar]
- Imanberdiyev, N.; Fu, C.; Kayacan, E.; Chen, I. Autonomous navigation of uav by using real-time model-based reinforcement learning. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016. [Google Scholar]
- Sadeghi, F.; Levine, S. Cad2rl: Real single-image flight without a single real image. arXiv 2016, arXiv:abs/1611.04201. [Google Scholar]
- Zhu, Y.; Mottaghi, R.; Kolve, E.; Lim, J.J.; Gupta, A.; Fei-Fei, L.; Farhadi, A. Target-driven visual navigation in indoor scenes using deep reinforcement learning. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3357–3364. [Google Scholar]
- Gandhi, D.; Pinto, L.; Gupta, A. Learning to fly by crashing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3948–3955. [Google Scholar]
- Loquercio, A.; Maqueda, A.I.; del-Blanco, C.R.; Scaramuzza, D. DroNet: Learning to Fly by Driving. IEEE Robot. Autom. Lett. 2018, 3, 1088–1095. [Google Scholar] [CrossRef]
- Giusti, A.; Guzzi, J.; Ciresan, D.C.; He, F.-L.; Rodriguez, J.P.; Fontana, F.; Faessler, M.; Forster, C.; Schmidhuber, J.; di Caro, G.; et al. A machine learning approach to visual perception of forest trails for mobile robots. IEEE Robot. Autom. Lett. 2016, 1, 661–667. [Google Scholar] [CrossRef] [Green Version]
- Smolyanskiy, N.; Kamenev, A.; Smith, J.; Birchfield, S. Toward low-flying autonomous mav trail navigation using deep neural networks for environmental awareness. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Yang, S.; Konam, S.; Ma, C.; Rosenthal, S.; Veloso, M.; Scherer, S. Obstacle avoidance through deep networks based intermediate perception. arXiv 2017, arXiv:1704.08759. [Google Scholar]
- Chakravarty, P.; Kelchtermans, K.; Roussel, T.; Wellens, S.; Tuytelaars, T.; van Eycken, L. CNN-based single image obstacle avoidance on a quadrotor. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6369–6374. [Google Scholar]
- Niu, Z.; Zhou, M.; Wang, L.; Gao, X.; Hua, G. Ordinal regression with multiple output CNN for age estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4920–4928. [Google Scholar]
- Cao, W.; Mirjalili, V.A.; Raschka, S. Consistent rank logits for ordinal regression with convolutional neural networks. arXiv 2019, arXiv:abs/1901.07884. [Google Scholar]
- Liu, Y.; Kong, A.W.K.; Goh, C.K. A constrained deep neural network for ordinal regression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 831–839. [Google Scholar]
- Fu, H.; Gong, M.; Wang, C.; Batmanghelich, K.; Tao, D. Deep ordinal regression network for monocular depth estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 2002–2011. [Google Scholar]
- Gutiérrez, P.A.; Pérez-Ortiz, M.; Sánchez-Monedero, J.; Fernández-Navarro, F.; Hervás-Martínez, C. Ordinal regression methods: Survey and experimental study. IEEE Trans. Knowl. Data Eng. 2016, 28, 127–146. [Google Scholar]
- Li, X.; Wang, M.; Fang, Y. Height estimation from single aerial images using a deep ordinal regression network. IEEE Geosci. Remote Sens. Lett. 2020. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In Computer Vision—(ECCV) 2016—14th European Conference; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Amsterdam, The Netherlands, 2016; pp. 630–645. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the 32nd International Conference on Machine Learning (ICML), Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Zhang, X.; Zhang, L.; Pei, H.; Lewis, F.L. Part-based multi-task deep network for autonomous indoor drone navigation. Trans. Inst. Meas. Control 2020. [Google Scholar] [CrossRef]
- Indoor Navigation UAV Dataset. Available online: https://www.imperial.ac.uk/intelligent-digital-systems/indoor-uav-data/ (accessed on 22 September 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Performance | Algorithms | ||
|---|---|---|---|---|
| NUD-Based Ordinal Regression | NSIDORA (ours) | Two-Stream [14] | ||
| Dangerous | accuracy | 0.977475777 | 0.977979112 | - |
| Precision | 0.961614457 | 0.9470329 | - | |
| Recall | 0.945303185 | 0.94556296 | - | |
| F1-Score | 0.953367147 | 0.946273898 | - | |
| Decision | RMSE | 0.0322 | 0.0214 | 0.0201 |
| Safe | accuracy | 0.995092488 | 0.990184976 | - |
| Precision | 0.937024896 | 0.94399412 | - | |
| Recall | 0.95513324 | 0.93809859 | - | |
| F1-Score | 0.945489377 | 0.940682157 | - | |
| - | fps | 75 | 75 | 22 |
| Area | Performance | Algorithms | ||
|---|---|---|---|---|
| NUD-Based Ordinal Regression | NSIDORA (ours) | Two-Stream [14] | ||
| Decision | RMSE | 0.0340 | 0.0154 | 0.0197 |
| Area | Performance | Decoders | |
|---|---|---|---|
| Decoder [30] | Ours | ||
| Decision | RMSE | 0.0270 | 0.0214 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, L.; Lewis, F.L.; Pei, H. Non-Uniform Discretization-based Ordinal Regression for Monocular Depth Estimation of an Indoor Drone. Electronics 2020, 9, 1767. https://doi.org/10.3390/electronics9111767
Zhang X, Zhang L, Lewis FL, Pei H. Non-Uniform Discretization-based Ordinal Regression for Monocular Depth Estimation of an Indoor Drone. Electronics. 2020; 9(11):1767. https://doi.org/10.3390/electronics9111767
Chicago/Turabian StyleZhang, Xiangzhu, Lijia Zhang, Frank L. Lewis, and Hailong Pei. 2020. "Non-Uniform Discretization-based Ordinal Regression for Monocular Depth Estimation of an Indoor Drone" Electronics 9, no. 11: 1767. https://doi.org/10.3390/electronics9111767