The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks



Abstract
:1. Introduction
2. Literature Review
2.1. Black Ice Detection Methods
2.2. Deep Learning Applications to Intelligent Transportation
2.3. Summary
3. Learning Environment Setting
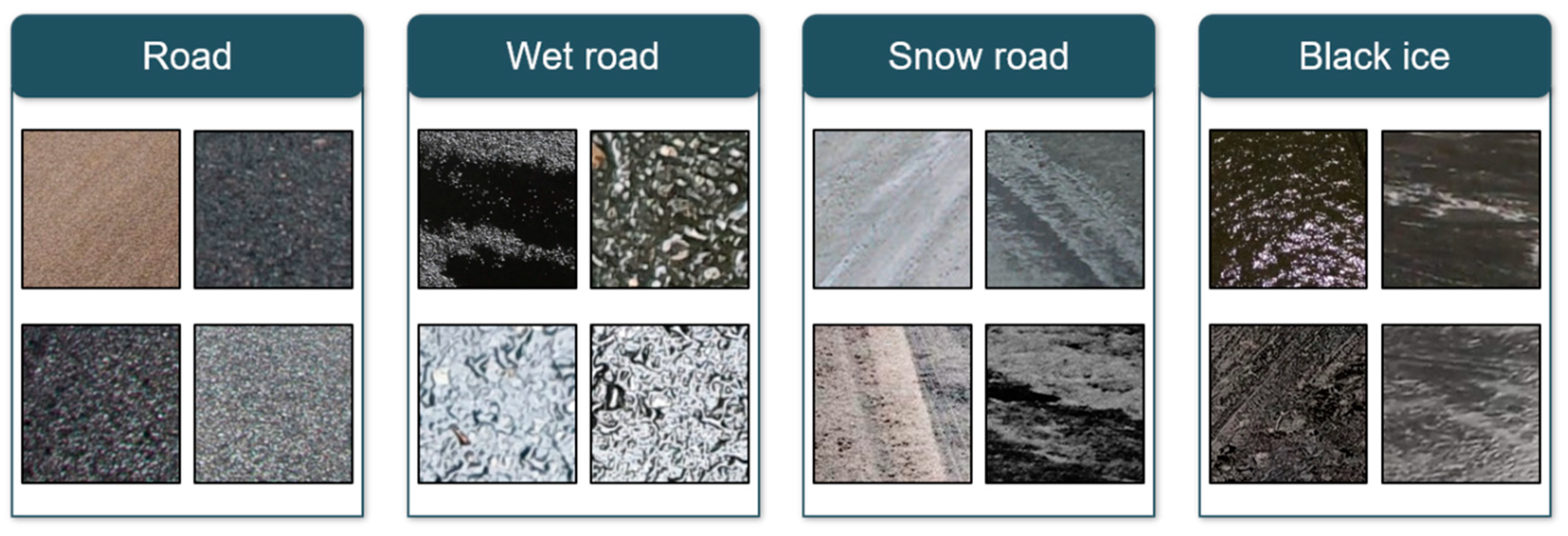
3.1. Data Collecting and Preprocessing
3.1.1. Data Collection
- Data Collection
- 2.
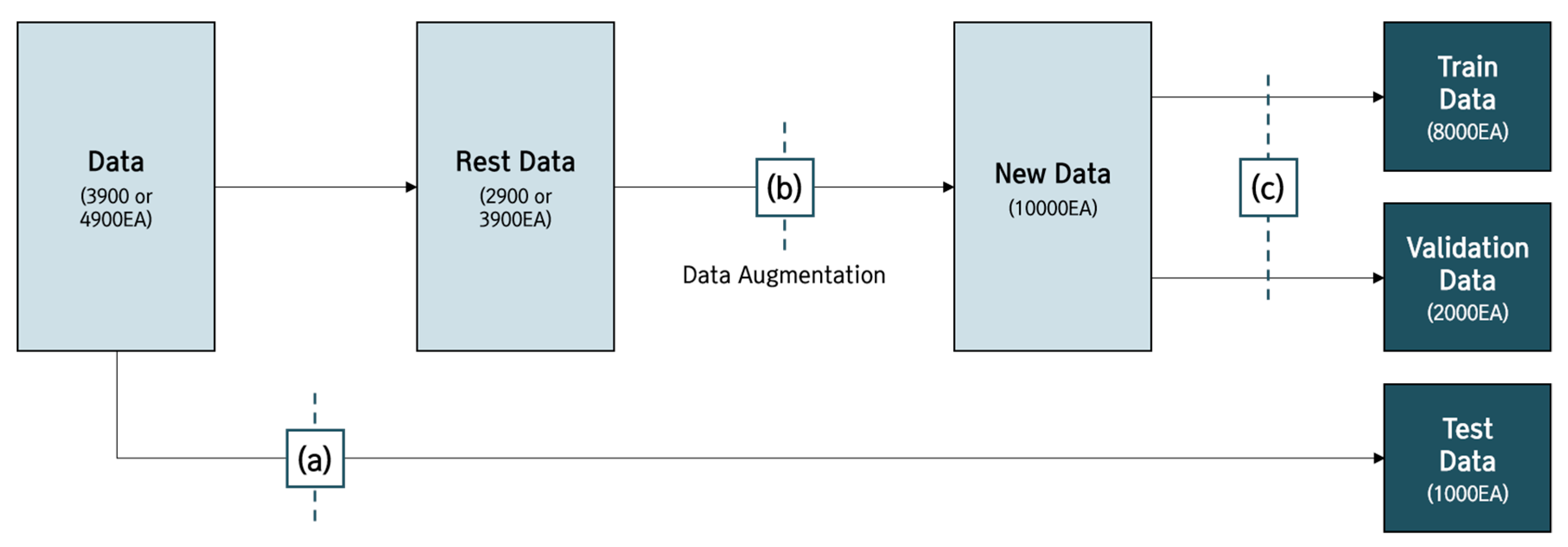
- Data Split
3.1.2. 1st Preprocessing
- Channel Setup
- 2.
- Data Padding
3.1.3. 2nd Preprocessing
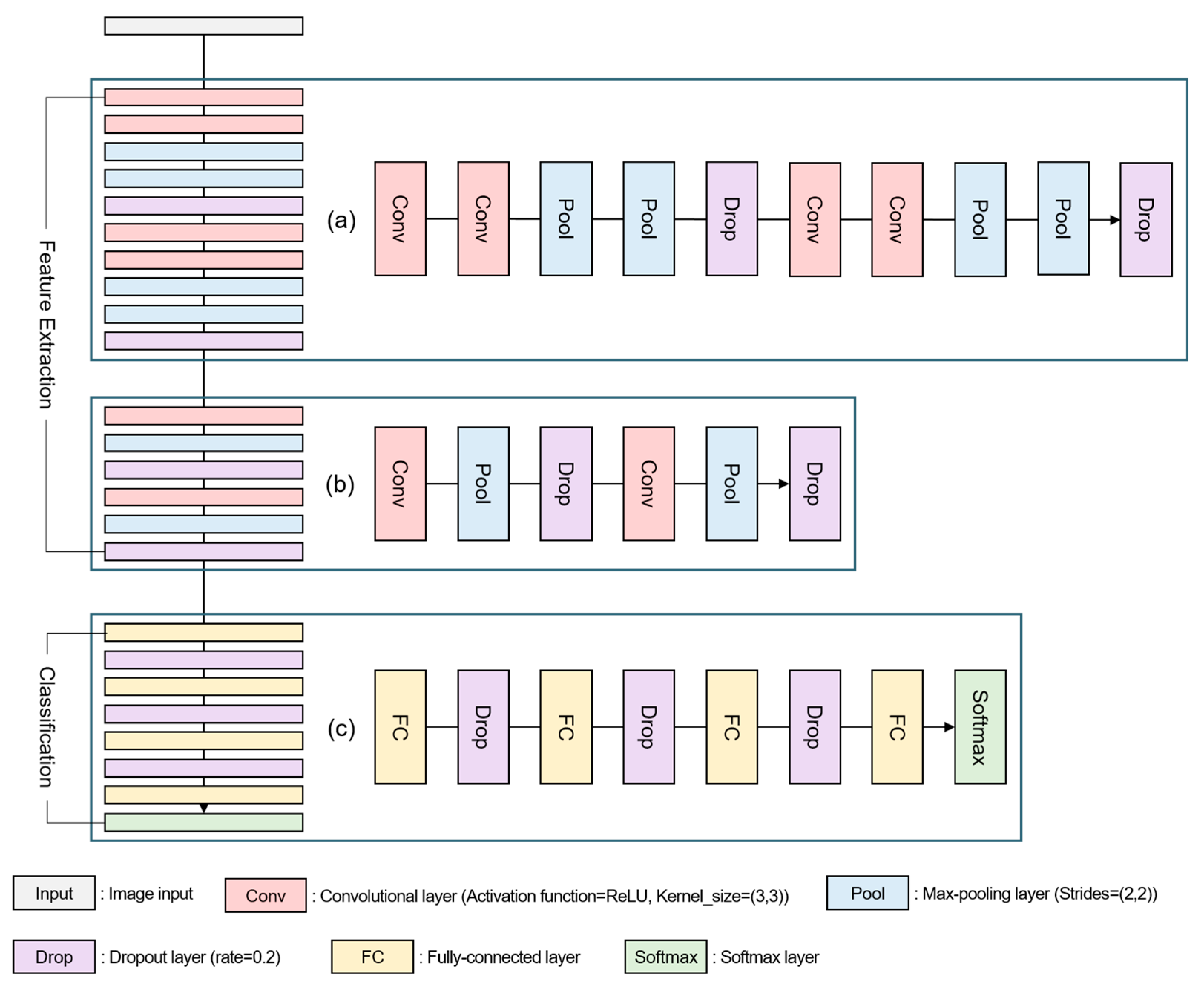
3.2. CNN Design and Learning
4. Result
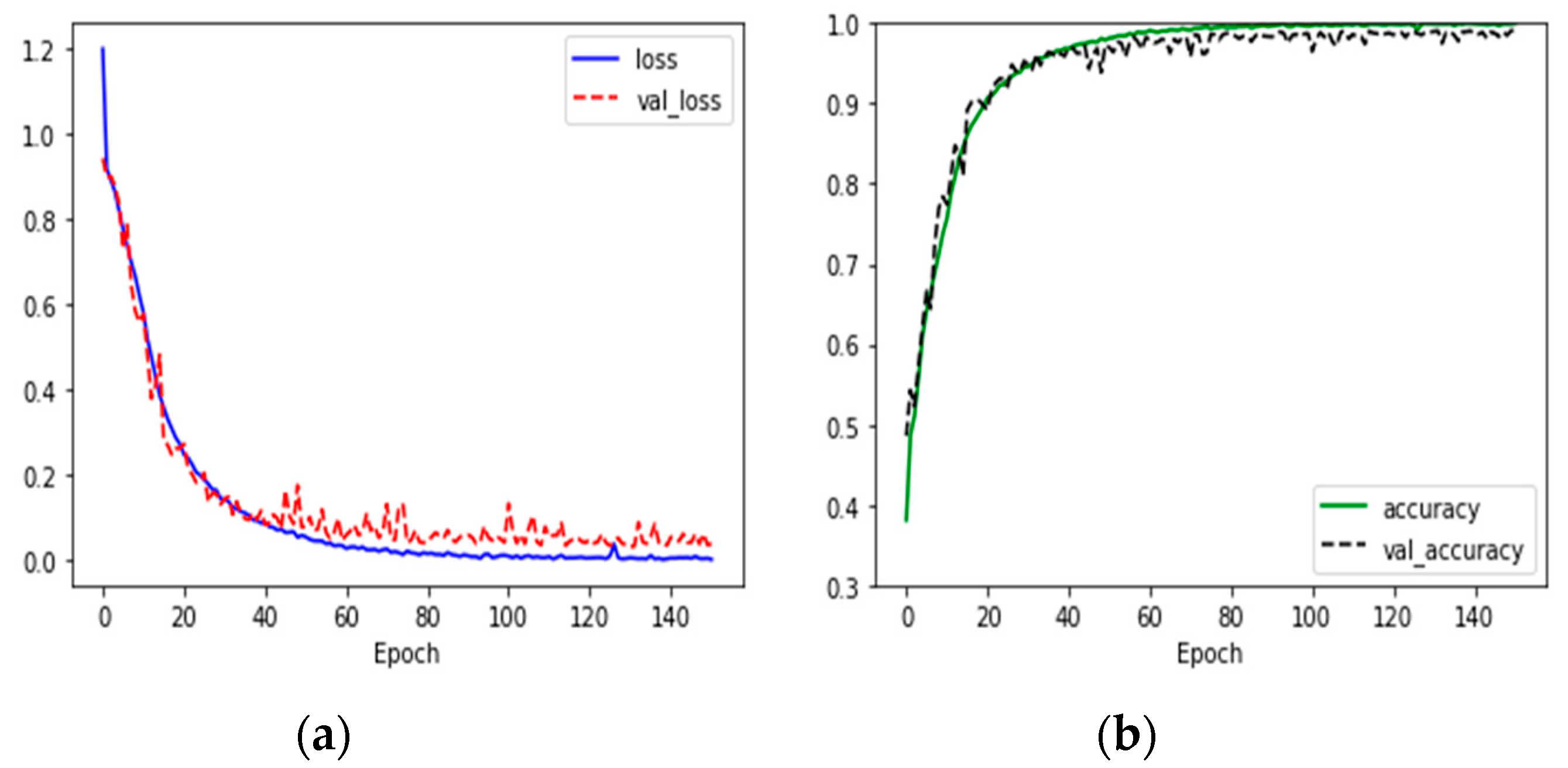
4.1. Result
4.2. Discussion
4.3. Application Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, K.; Jeon, S.; Kim, H.; Kum, D. Optimal path tracking control of autonomous vehicle: Adaptive full-state linear quadratic gaussian (lqg) control. IEEE Access 2019, 7, 109120–109133. [Google Scholar] [CrossRef]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey (No. DOT HS 812 115); NHTSA’s National Center for Statistics and Analysis: Washington, DC, USA, 2015. [Google Scholar]
- Federal Ministry of Transport and Digital Infrastructure. Ethics Commission: Automated and Connected Driving; Federal Ministry of Transport and Digital Infrastructure: Berlin, Germany, 2017.
- National Highway Traffic Safety Administration. Federal Automated Vehicles Policy: Accelerating the Next Revolution in Roadway Safety; National Highway Traffic Safety Administration: Washington, DC, USA, 2016.
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Mehler, B.; Reimer, B.; Coughlin, J.F. Autonomous vehicles and alternatives to driving: Trust, preferences, and effects of age. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Hartwich, F.; Witzlack, C.; Beggiato, M.; Krems, J.F. The first impression counts–A combined driving simulator and test track study on the development of trust and acceptance of highly automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 522–535. [Google Scholar] [CrossRef]
- Kim, K.; Kim, B.; Lee, K.; Ko, B.; Yi, K. Design of integrated risk management-based dynamic driving control of automated vehicles. IEEE Intell. Transp. Syst. Mag. 2017, 9, 57–73. [Google Scholar] [CrossRef]
- The NewYork Times Online. Available online: https://www.nytimes.com/2020/10/26/technology/driverless-cars.html (accessed on 3 December 2020).
- Tabatabai, H.; Aljuboori, M. A novel concrete-based sensor for detection of ice and water on roads and bridges. Sensors 2017, 17, 2912. [Google Scholar] [CrossRef] [Green Version]
- Alimasi, N.; Takahashi, S.; Enomoto, H. Development of a mobile optical system to detect road-freezing conditions. Bull. Glaciol. Res. 2012, 30, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Abdalla, Y.E.; Iqbal, M.T.; Shehata, M. Black Ice detection system using Kinect. In Proceedings of the IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Minullin, R.G.; Mustafin, R.G.; Piskovatskii, Y.V.; Vedernikov, S.G.; Lavrent’ev, I.S. A detection technique for black ice and frost depositions on wires of a power transmission line by location sounding. Russ. Electr. Eng. 2011, 82, 541–543. [Google Scholar] [CrossRef]
- Gailius, D.; Jačėnas, S. Ice detection on a road by analyzing tire to road friction ultrasonic noise. Ultragarsas Ultrasound 2007, 62, 17–20. [Google Scholar]
- Ma, X.; Ruan, C. Method for black ice detection on roads using tri-wavelength backscattering measurements. Appl. Opt. 2020, 59, 7242–7246. [Google Scholar] [CrossRef]
- Han, J.; Koo, B.; Choi, K. Obstacle detection and recognition system for self-driving cars. Converg. Inf. Pap. 2017, 7, 229–235. (In Korean) [Google Scholar]
- Gao, H.; Cheng, B.; Wang, J.; Li, K.; Zhao, J.; Li, D. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Trans. Ind. Inform. 2018, 14, 4224–4231. [Google Scholar] [CrossRef]
- Ammour, N.; Alhichri, H.; Bazi, Y.; Benjdira, B.; Alajlan, N.; Zuair, M. Deep learning approach for car detection in UAV imagery. Remote Sens. 2017, 9, 312. [Google Scholar] [CrossRef] [Green Version]
- Nafi’i, M.W.; Yuniarno, E.M.; Affandi, A. Vehicle Brands and Types Detection Using Mask R-CNN. In Proceedings of the International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 28–29 August 2019; pp. 422–427. [Google Scholar]
- Zhang, L.; Lin, L.; Liang, X.; He, K. Is faster R-CNN doing well for pedestrian detection? In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 443–457. [Google Scholar]
- Chen, Y.Y.; Jhong, S.Y.; Li, G.Y.; Chen, P.H. Thermal-based pedestrian detection using faster r-cnn and region decomposition branch. In Proceedings of the International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Taipei, Taiwan, 3–6 December 2019; pp. 1–2. [Google Scholar]
- Ammar, A.; Koubaa, A.; Ahmed, M.; Saad, A. Aerial images processing for car detection using convolutional neural networks: Comparison between faster r-cnn and yolov3. arXiv 2019, arXiv:1910.07234. [Google Scholar]
- Benjdira, B.; Khursheed, T.; Koubaa, A.; Ammar, A.; Ouni, K. Car detection using unmanned aerial vehicles: Comparison between faster r-cnn and yolov3. In Proceedings of the 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 5–7 February 2019; pp. 1–6. [Google Scholar]
- Xie, L.; Ahmad, T.; Jin, L.; Liu, Y.; Zhang, S. A new CNN-based method for multi-directional car license plate detection. IEEE Trans. Intell. Transp. Syst. 2018, 19, 507–517. [Google Scholar] [CrossRef]
- Yu, Y.; Jin, Q.; Chen, C.W. FF-CMnet: A CNN-based model for fine-grained classification of car models based on feature fusion. In Proceedings of the IEEE International Conference on Multimedia and Expo (ICME), San Diego, CA, USA, 23–27 July 2018; pp. 1–6. [Google Scholar]
- Putra, M.H.; Yussof, Z.M.; Lim, K.C.; Salim, S.I. Convolutional neural network for person and car detection using yolo framework. J. Telecommun. Electron. Comput. Eng. 2018, 10, 67–71. [Google Scholar]
- Zhu, Z.; Liang, D.; Zhang, S.; Huang, X.; Li, B.; Hu, S. Traffic-sign detection and classification in the wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2110–2118. [Google Scholar]
- Vennelakanti, A.; Shreya, S.; Rajendran, R.; Sarkar, D.; Muddegowda, D.; Hanagal, P. Traffic sign detection and recognition using a cnn ensemble. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; pp. 1–4. [Google Scholar]
- Alghmgham, D.A.; Latif, G.; Alghazo, J.; Alzubaidi, L. Autonomous traffic sign (ATSR) detection and recognition using deep CNN. Procedia Comput. Sci. 2019, 163, 266–274. [Google Scholar] [CrossRef]
- Peemen, M.; Mesman, B.; Corporaal, H. Speed sign detection and recognition by convolutional neural networks. In Proceedings of the 8th International Automotive Congress, Eindhoven, The Netherlands, 16–17 May 2011; pp. 162–170. [Google Scholar]
- Malbog, M.A. MASK R-CNN for Pedestrian Crosswalk Detection and Instance Segmentation. In Proceedings of the IEEE 6th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Kuala Lumpur, Malaysia, 20–21 December 2019; pp. 1–5. [Google Scholar]
- Tabernik, D.; Skočaj, D. Deep learning for large-scale traffic-sign detection and recognition. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1427–1440. [Google Scholar] [CrossRef] [Green Version]
- Kukreja, R.; Rinchen, S.; Vaidya, B.; Mouftah, H.T. Evaluating Traffic Signs Detection using Faster R-CNN for Autonomous driving. In Proceedings of the IEEE 25th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Pisa, Italy, 14–16 September 2020; pp. 1–6. [Google Scholar]
- Boujemaa, K.S.; Berrada, I.; Bouhoute, A.; Boubouh, K. Traffic sign recognition using convolutional neural networks. In Proceedings of the International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1–4 November 2017; pp. 1–6. [Google Scholar]
- Qian, R.; Liu, Q.; Yue, Y.; Coenen, F.; Zhang, B. Road surface traffic sign detection with hybrid region proposal and fast R-CNN. In Proceedings of the 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 555–559. [Google Scholar]
- Shustanov, A.; Yakimov, P. CNN design for real-time traffic sign recognition. Procedia Eng. 2017, 201, 718–725. [Google Scholar] [CrossRef]
- Lee, H.S.; Kim, K. Simultaneous traffic sign detection and boundary estimation using convolutional neural network. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1652–1663. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, J.; Crowley, M.; Pan, G.; Fu, L. Design of Efficient Deep Learning models for Determining Road Surface Condition from Roadside Camera Images and Weather Data. arXiv 2020, arXiv:2009.10282. [Google Scholar]
- Pan, G.; Muresan, M.; Yu, R.; Fu, L. Real-time Winter Road Surface Condition Monitoring Using an Improved Residual CNN. Can. J. Civ. Eng. 2020. [Google Scholar] [CrossRef]
- Singh, J.; Shekhar, S. Road damage detection and classification in smartphone captured images using mask r-cnn. arXiv 2018, arXiv:1811.04535. [Google Scholar]
- Tong, Z.; Gao, J.; Han, Z.; Wang, Z. Recognition of asphalt pavement crack length using deep convolutional neural networks. Road Mater. Pavement Des. 2018, 19, 1334–1349. [Google Scholar] [CrossRef]
- Li, B.; Wang, K.C.; Zhang, A.; Yang, E.; Wang, G. Automatic classification of pavement crack using deep convolutional neural network. Int. J. Pavement Eng. 2020, 21, 457–463. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Choubisa, T.; Kashyap, M.; Chaitanya, K.K. Human Crawl vs Animal Movement and Person with Object Classifications Using CNN for Side-view Images from Camera. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics (ICACCI), Bangalore, India, 19–22 September 2018; pp. 48–54. [Google Scholar]
- Keras. Available online: https://keras.io/ (accessed on 11 November 2020).
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Gadd, M.; Newman, P. A framework for infrastructure-free warehouse navigation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3271–3278. [Google Scholar]
- Tourani, S.; Desai, D.; Parihar, U.S.; Garg, S.; Sarvadevabhatla, R.K.; Krishna, K.M. Early Bird: Loop Closures from Opposing Viewpoints for Perceptually-Aliased Indoor Environments. arXiv 2020, arXiv:2010.01421. [Google Scholar]
- Chen, X.; Vempati, A.S.; Beardsley, P. Streetmap-mapping and localization on ground planes using a downward facing camera. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1672–1679. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road | Wet Road | Snow Road | Black Ice | Total | |
|---|---|---|---|---|---|
| Number | 730 | 610 | 570 | 320 | 2230 |
| 256 × 256 px | 128 × 128 px | |
|---|---|---|
| Advantage | Easy to identify image characteristics | Large number of images Deep neural network can be implemented |
| Disadvantage | Small number of images Unable to implement deep neural network | Hard to identify image characteristics |
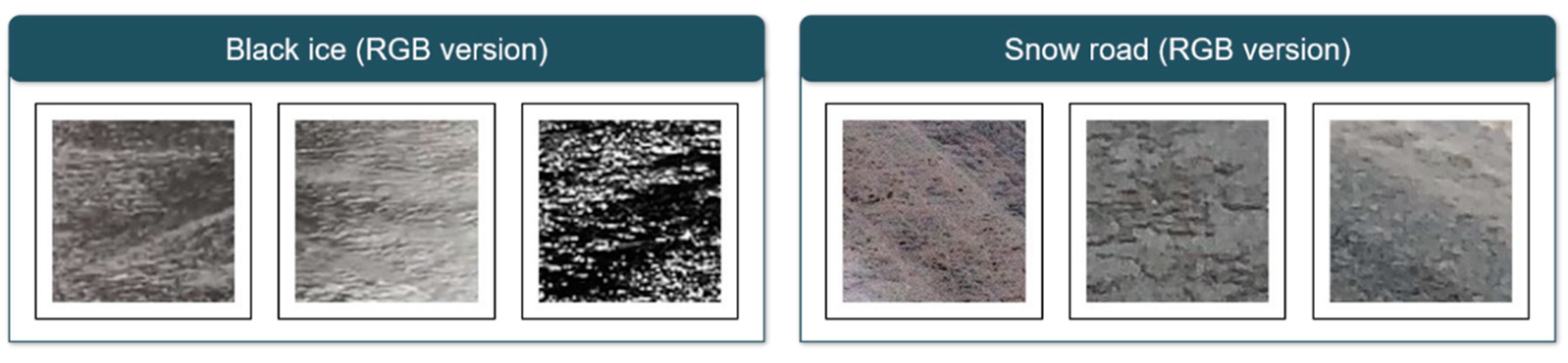
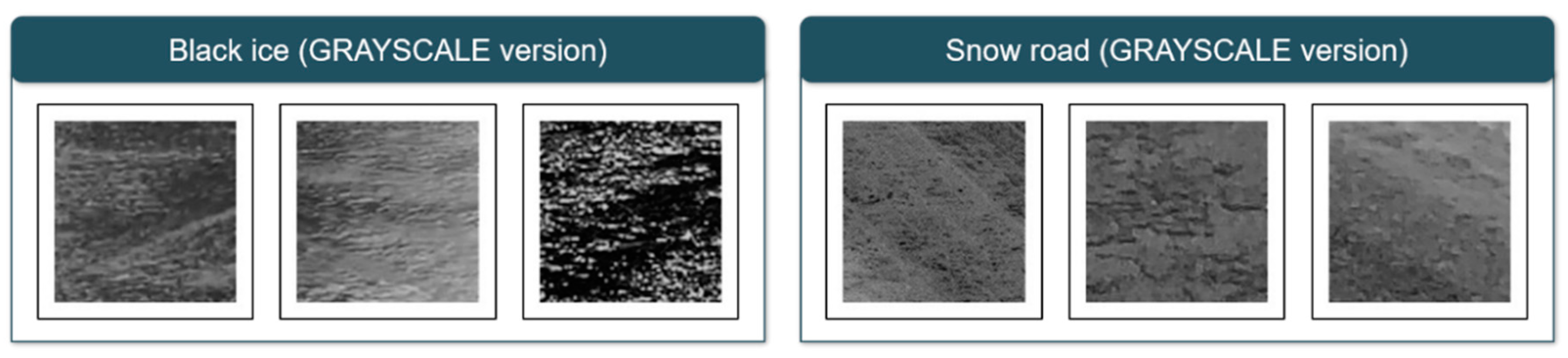
| RGB | GRAYSCALE (Black and White) | |
|---|---|---|
| Number of Channels | 3 Channels | 1 Channel |
| Feature | Large data size | Small data size |
| Advantage | Easy to identify image characteristics | No limit on the number of learning data Deep neural networks can be implemented |
| Disadvantage | Limited number of learning data Deep neural network impossible to implement | Hard to identify image characteristics |
| Original Data | Padding Data | ||
|---|---|---|---|
| Data augmentation results |  |  | |
| Learning results | Loss | 1.39 | 0.26 |
| Accuracy | 0.253 | 0.891 | |
| Class | Size | Number |
|---|---|---|
| Road | 150 × 150 px | 4900 |
| Wet road | 4900 | |
| Snow road | 3900 | |
| Black ice | 3900 | |
| Total | 17,600 | |
| Transformation Type | Value |
|---|---|
| Rotation | 20 |
| Width shift | 0.15 |
| Height shift | 0.15 |
| Zoom | 0.1 |
| Class | Train Data | Validation Data | Test Data | Total |
|---|---|---|---|---|
| Road | 8000 | 2000 | 1000 | 11,000 |
| Wet road | ||||
| Snow road | ||||
| Black ice |
| Class | Value |
|---|---|
| Activation Function | ReLU |
| Kernel size | (3,3) |
| Strides | (2,2) |
| Dropout rate | 0.2 |
| Optimizer | SGD |
| Epoch | 200 |
| Batch size | 32 |
| Earlystopping | 20 |
| Class | Loss | Accuracy |
|---|---|---|
| Train | 0.008 | 0.998 |
| Test | 0.097 | 0.982 |
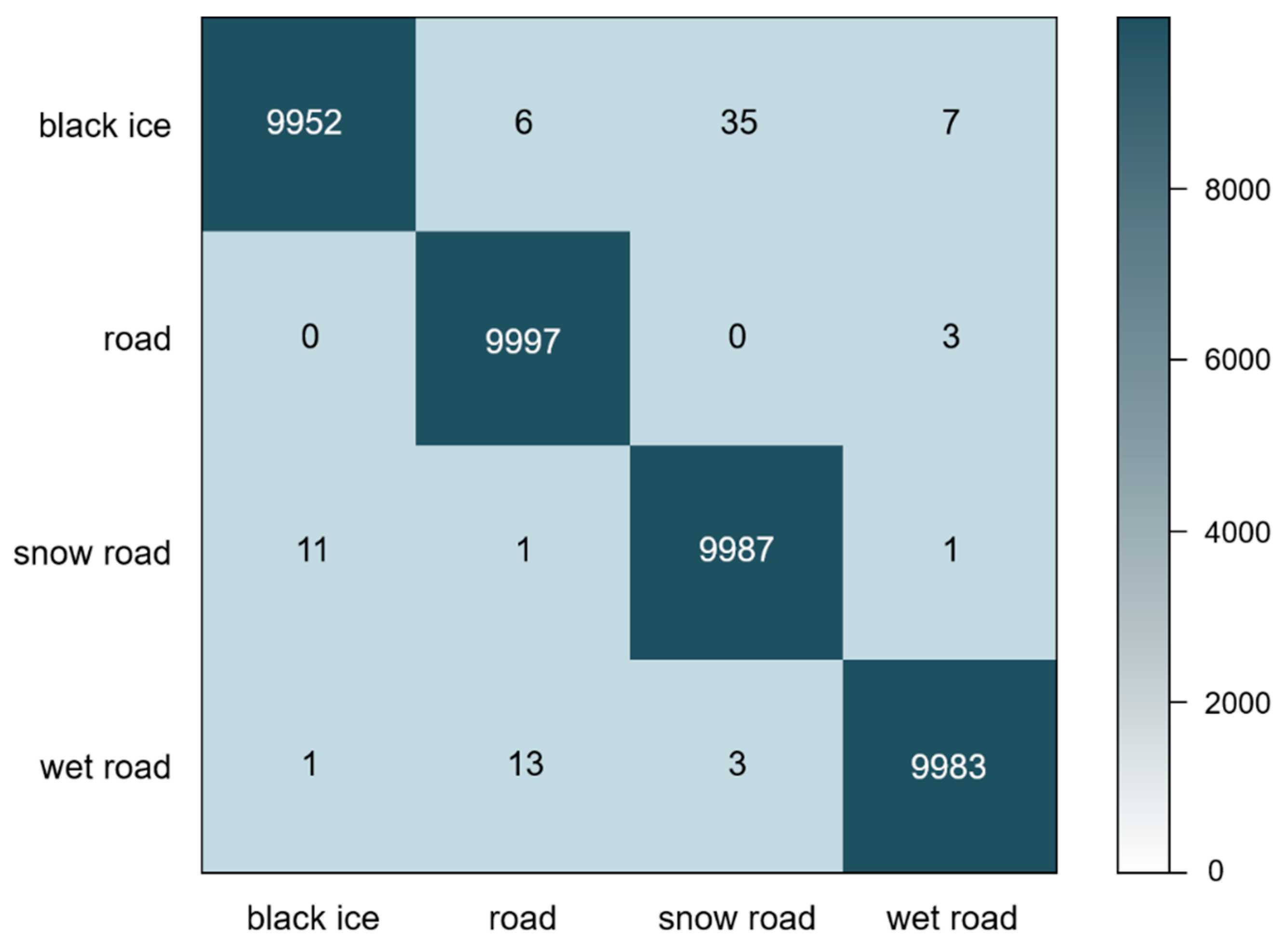
| Class | Accuracy | Precision | Recall |
|---|---|---|---|
| Road | 0.996 | 0.99 | 1.00 |
| Wet road | 0.989 | 0.99 | 0.99 |
| Snow road | 0.981 | 0.97 | 0.98 |
| Black ice | 0.961 | 0.98 | 0.96 |
| Average | 0.982 | 0.983 | 0.983 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Kang, M.; Song, J.; Hwang, K. The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks. Electronics 2020, 9, 2178. https://doi.org/10.3390/electronics9122178
Lee H, Kang M, Song J, Hwang K. The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks. Electronics. 2020; 9(12):2178. https://doi.org/10.3390/electronics9122178
Chicago/Turabian StyleLee, Hojun, Minhee Kang, Jaein Song, and Keeyeon Hwang. 2020. "The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks" Electronics 9, no. 12: 2178. https://doi.org/10.3390/electronics9122178
APA StyleLee, H., Kang, M., Song, J., & Hwang, K. (2020). The Detection of Black Ice Accidents for Preventative Automated Vehicles Using Convolutional Neural Networks. Electronics, 9(12), 2178. https://doi.org/10.3390/electronics9122178