The Experimental Modeling of Quad-Rotor Actuators with Undefined Hardware Errors for Safety-Flight


Abstract
:1. Introduction
2. Testbed for Motor Model Configuration Reflecting Motor Performance Error
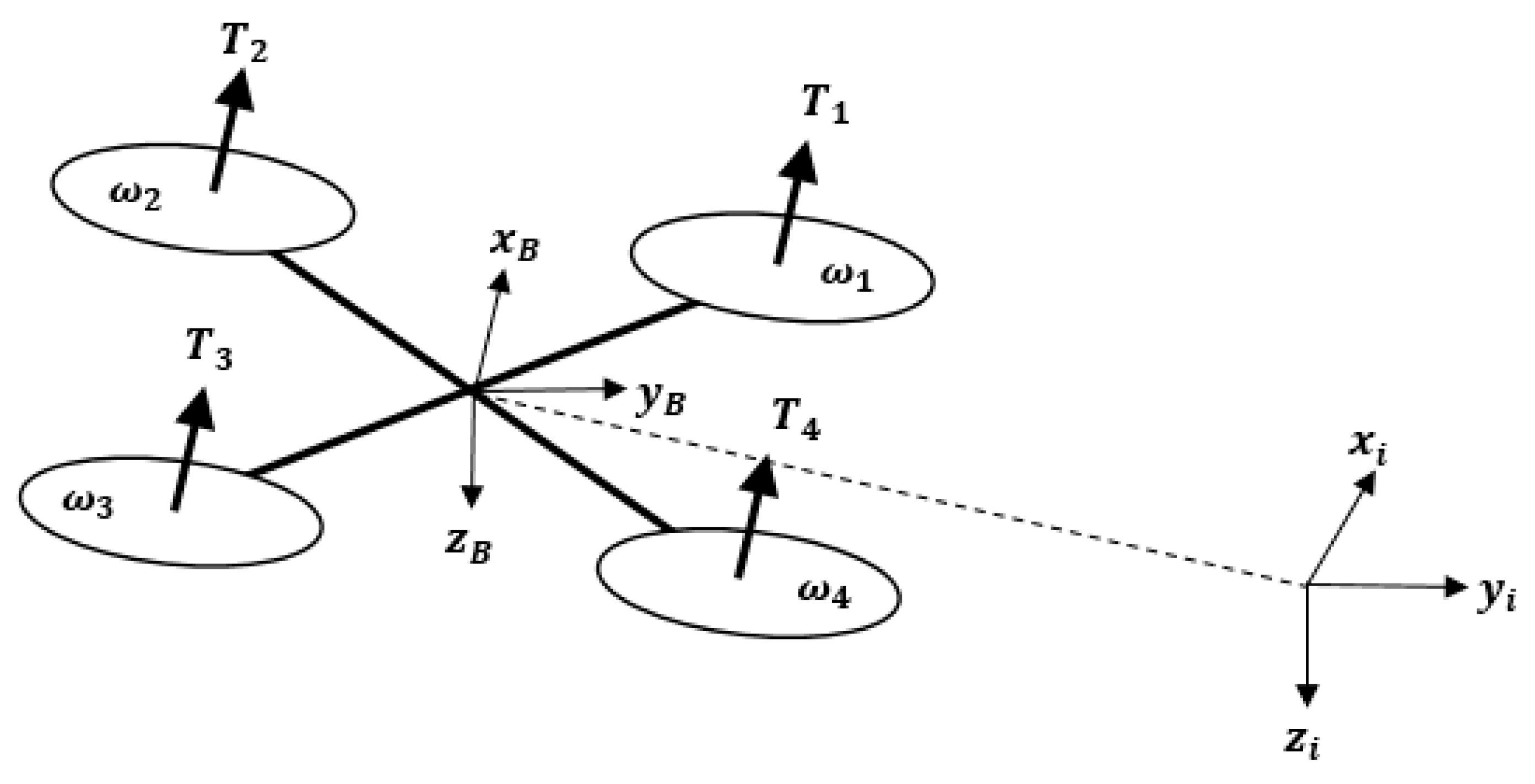
2.1. The Unstable Factor of Flight
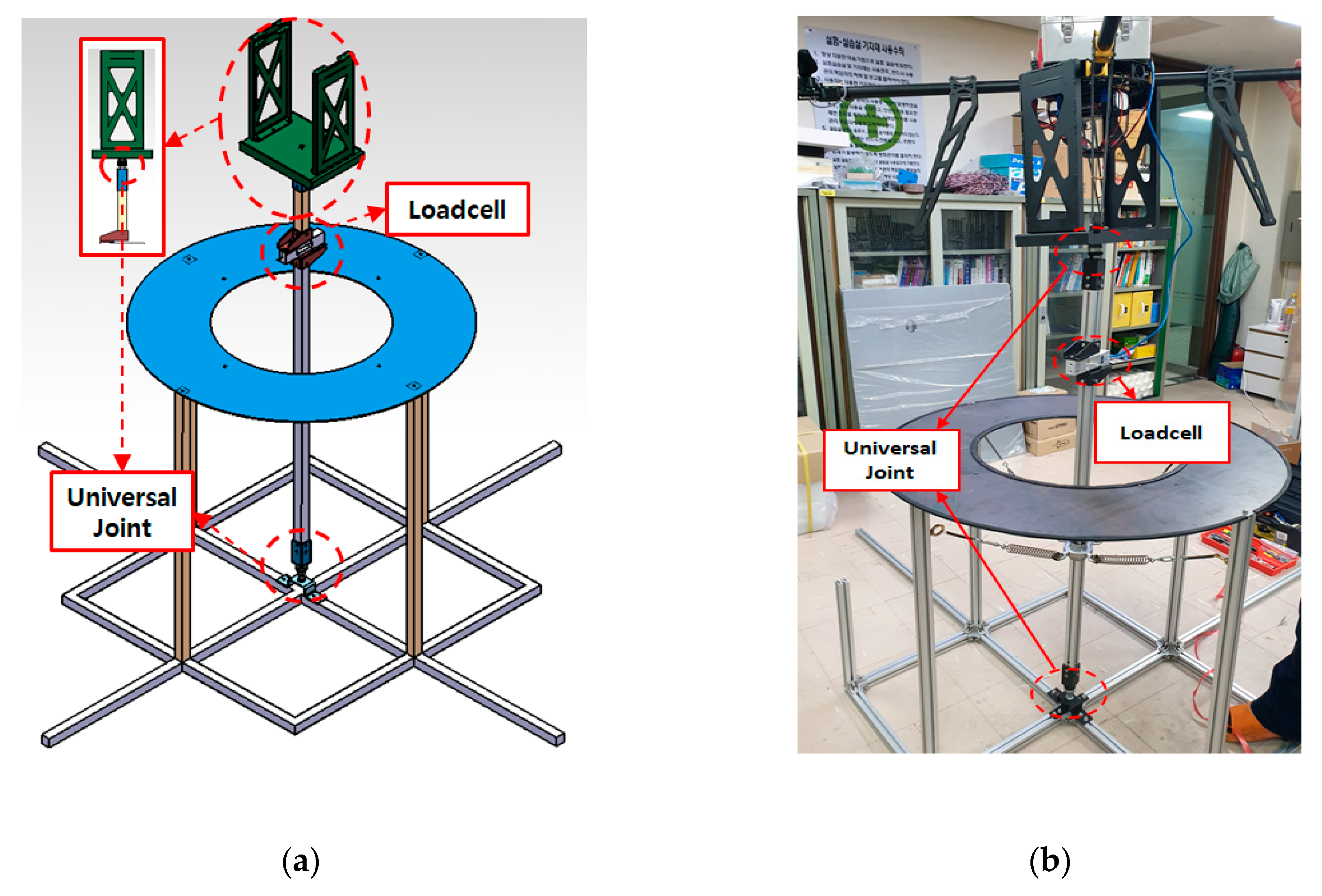
2.2. Configuring Testbed
3. Experiments on Hardware Affecting Motor Performance
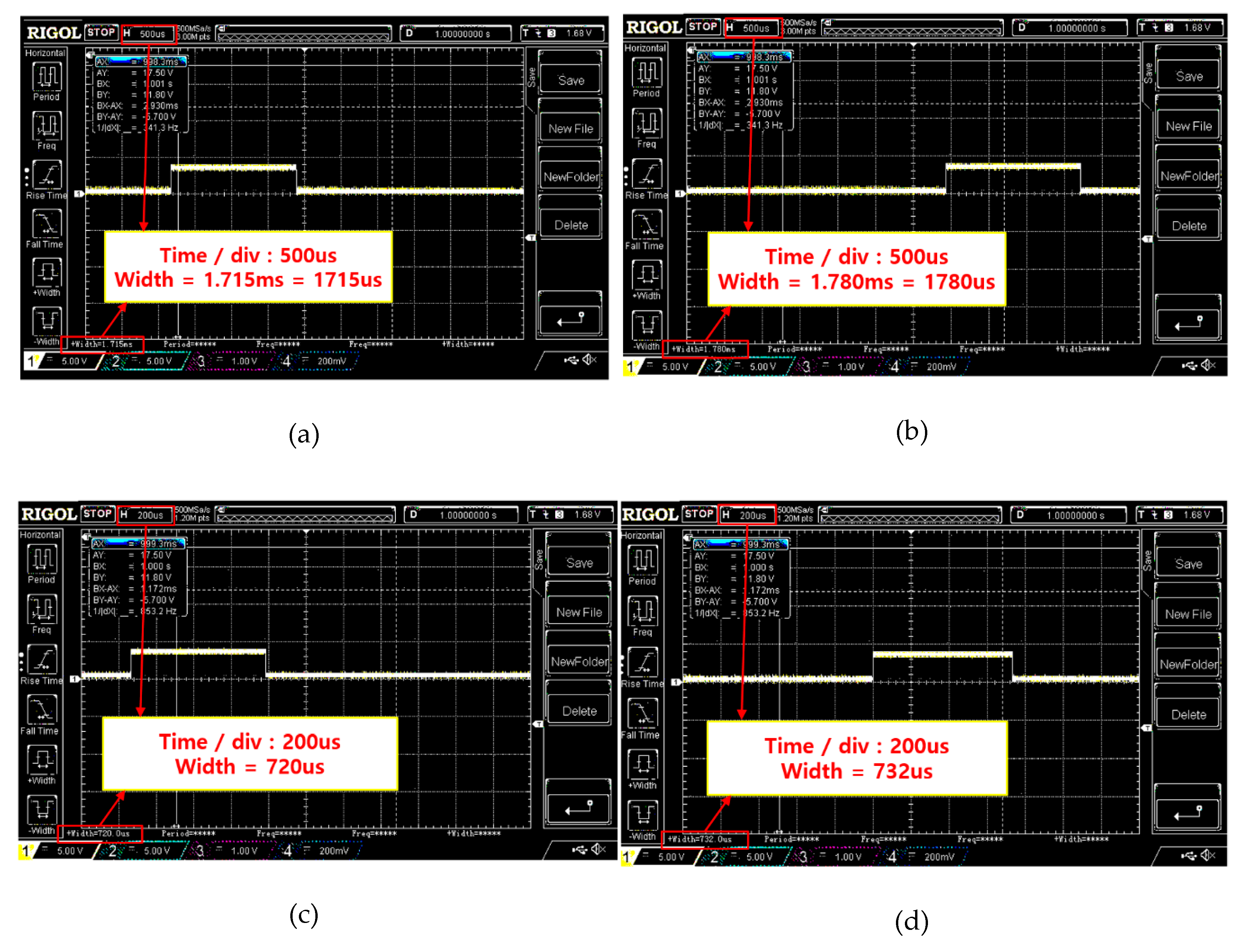
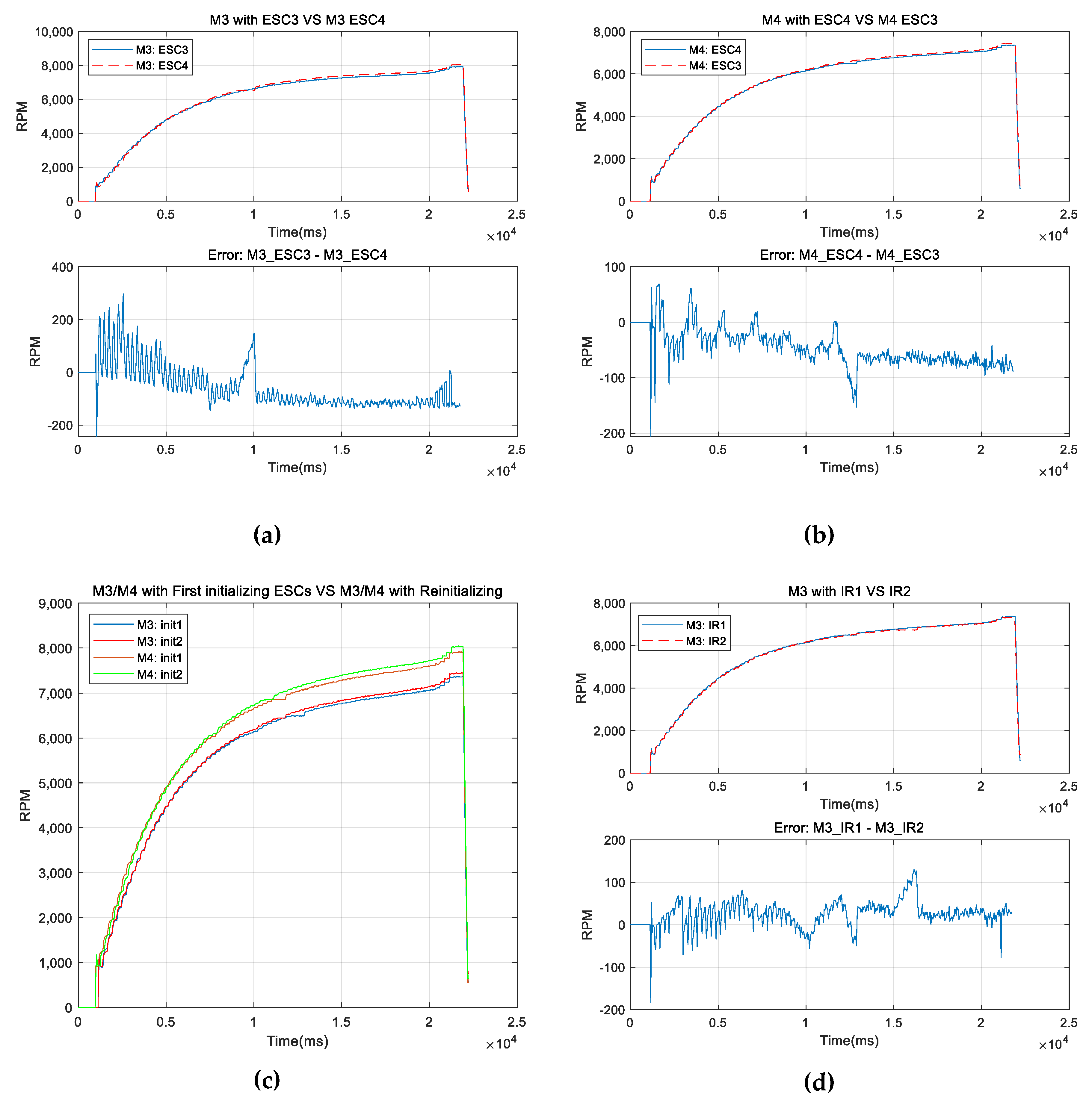
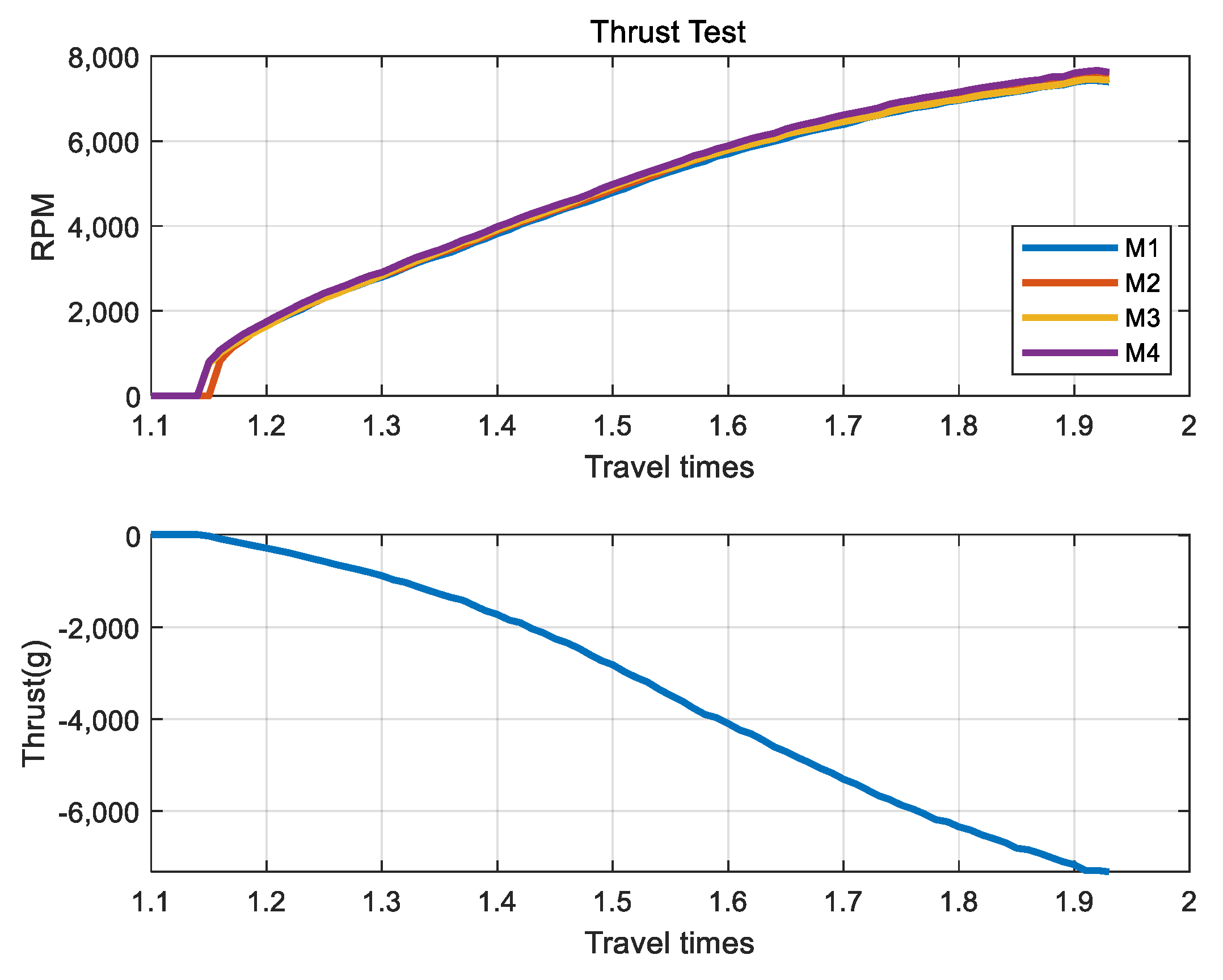
3.1. Experiments for the Performance of the Actuator Assembled with Motor and Propeller
| Supply voltage: 25.2 V Start Step 1. Ready to ESC with 1.1 ms control signal for M1 to M4 Step 2. Change control signals from 1.1 ms to 1.94 ms if control signal time is less than 1.94 ms 2.1 increase control signal: 10 us 2.2 keep the control signal during 270 ms 2.3 acquire data at 40ms intervals else 2.4 Set control signal to 1.1 ms 2.5 go to End End |
3.2. Experiments for the Performances of Motors while Changing Battery Voltage
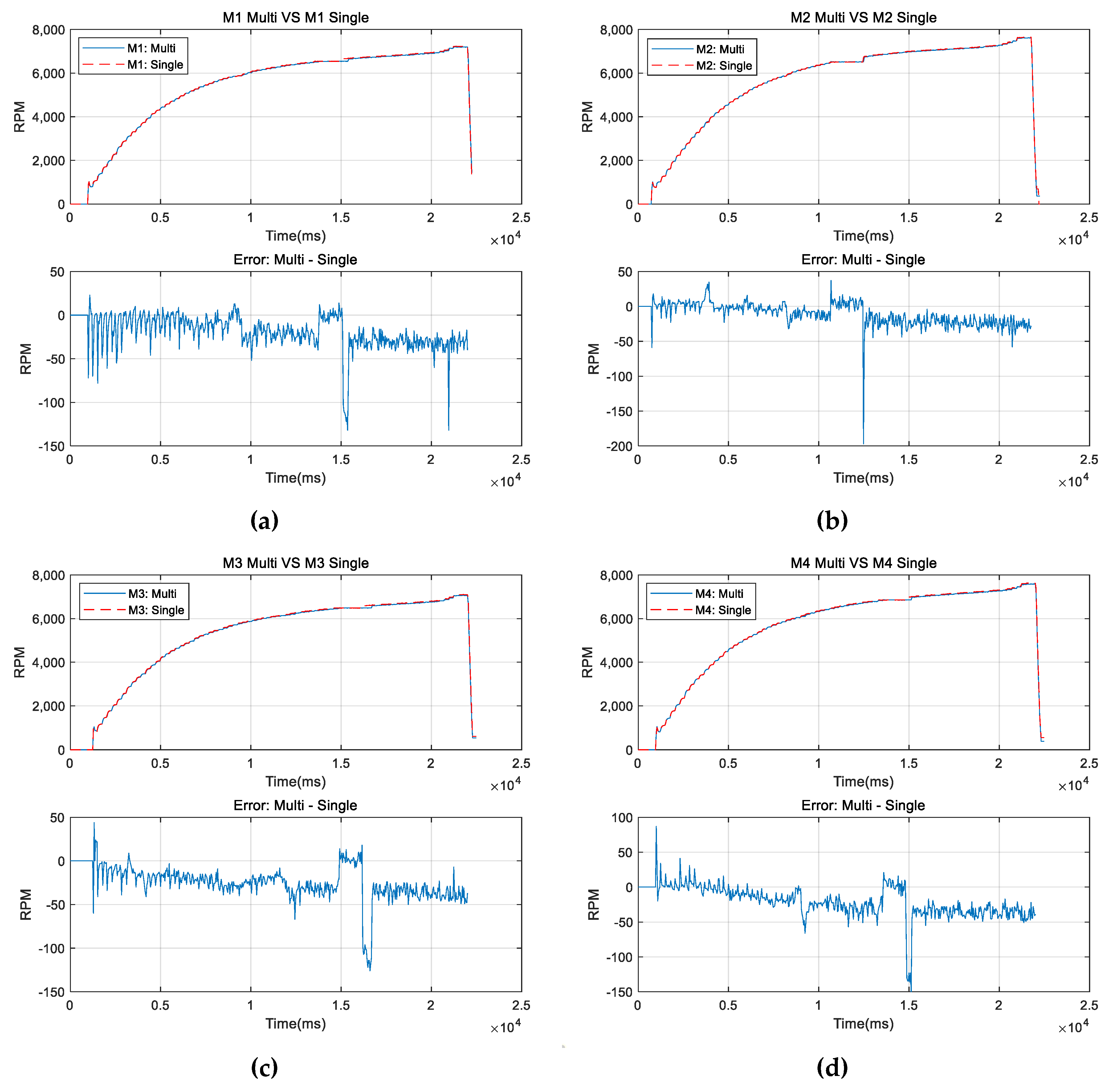
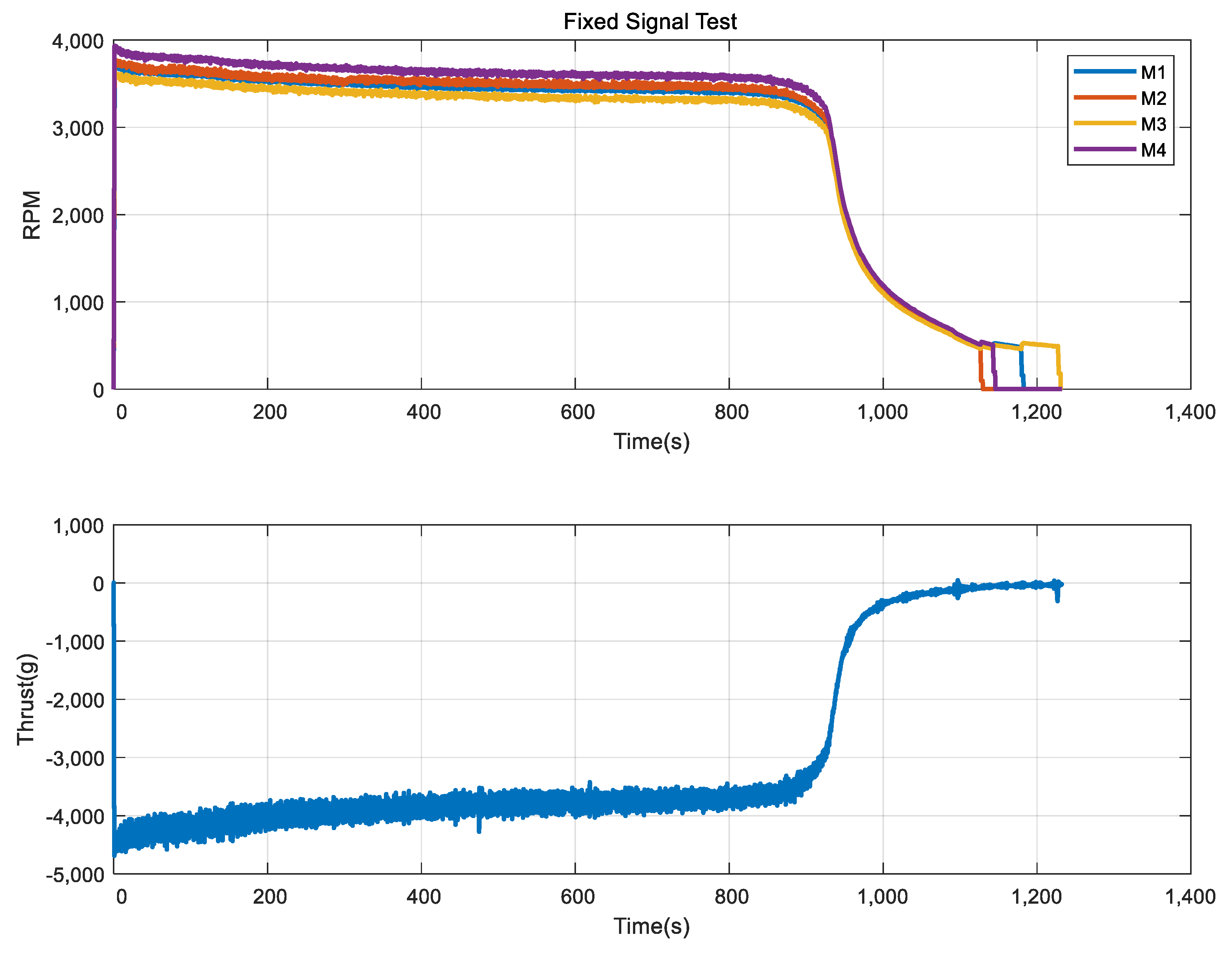
3.3. Experiments for the Performances of Motors when Maintaining the Control Signal until Stopping the Rotation
4. Result and Analysis
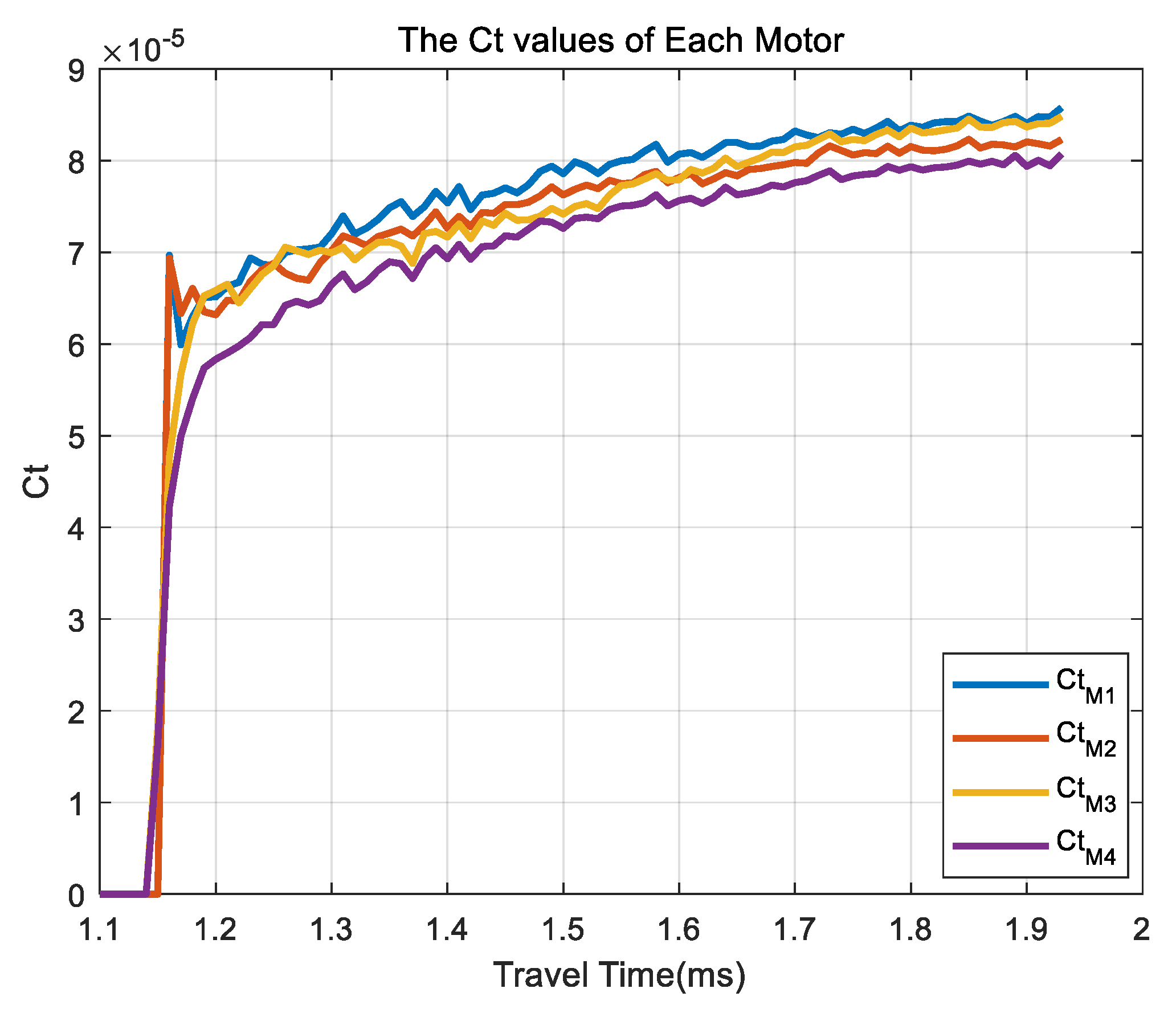
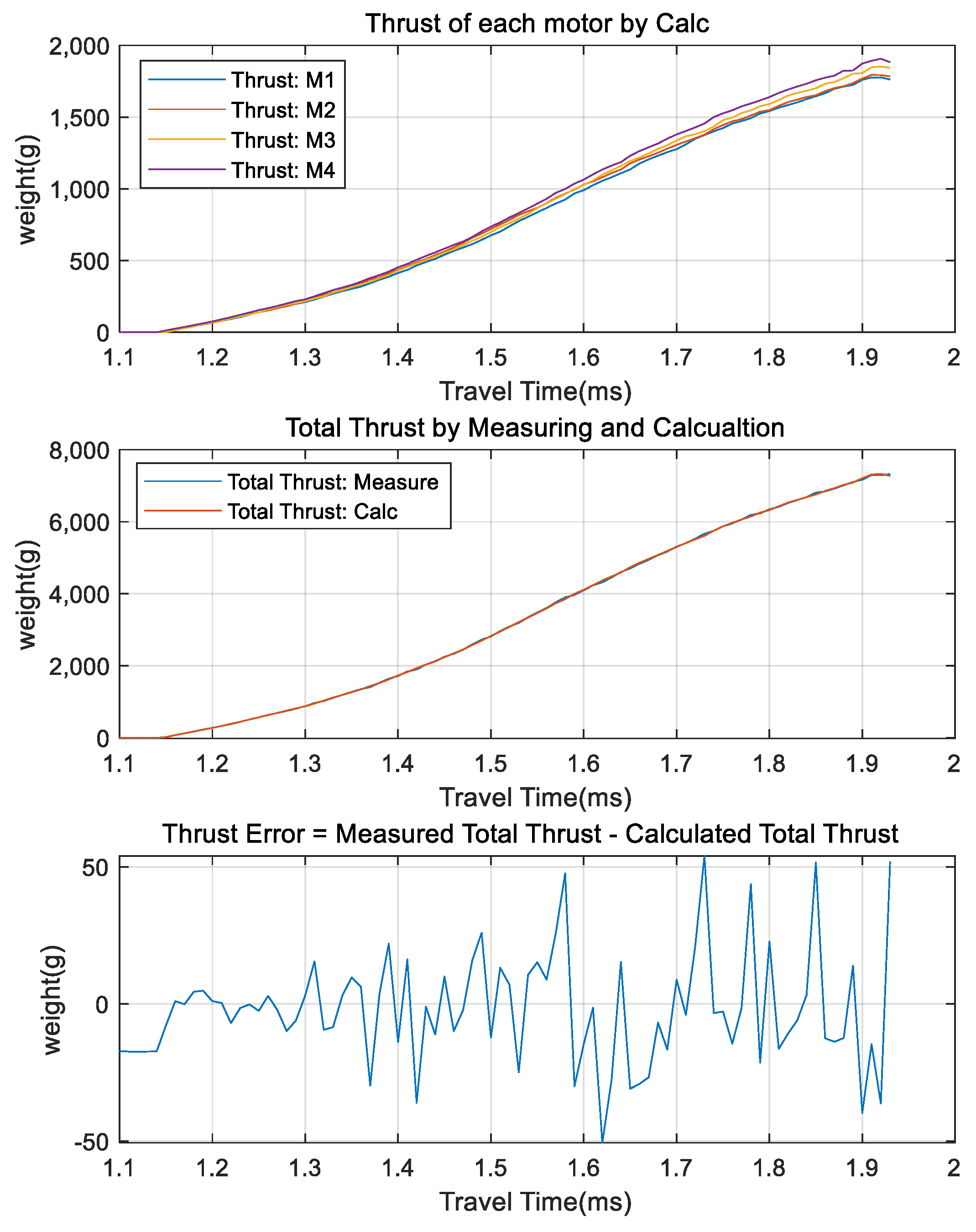
4.1. Coefficient of Relation between Propeller and Thrust
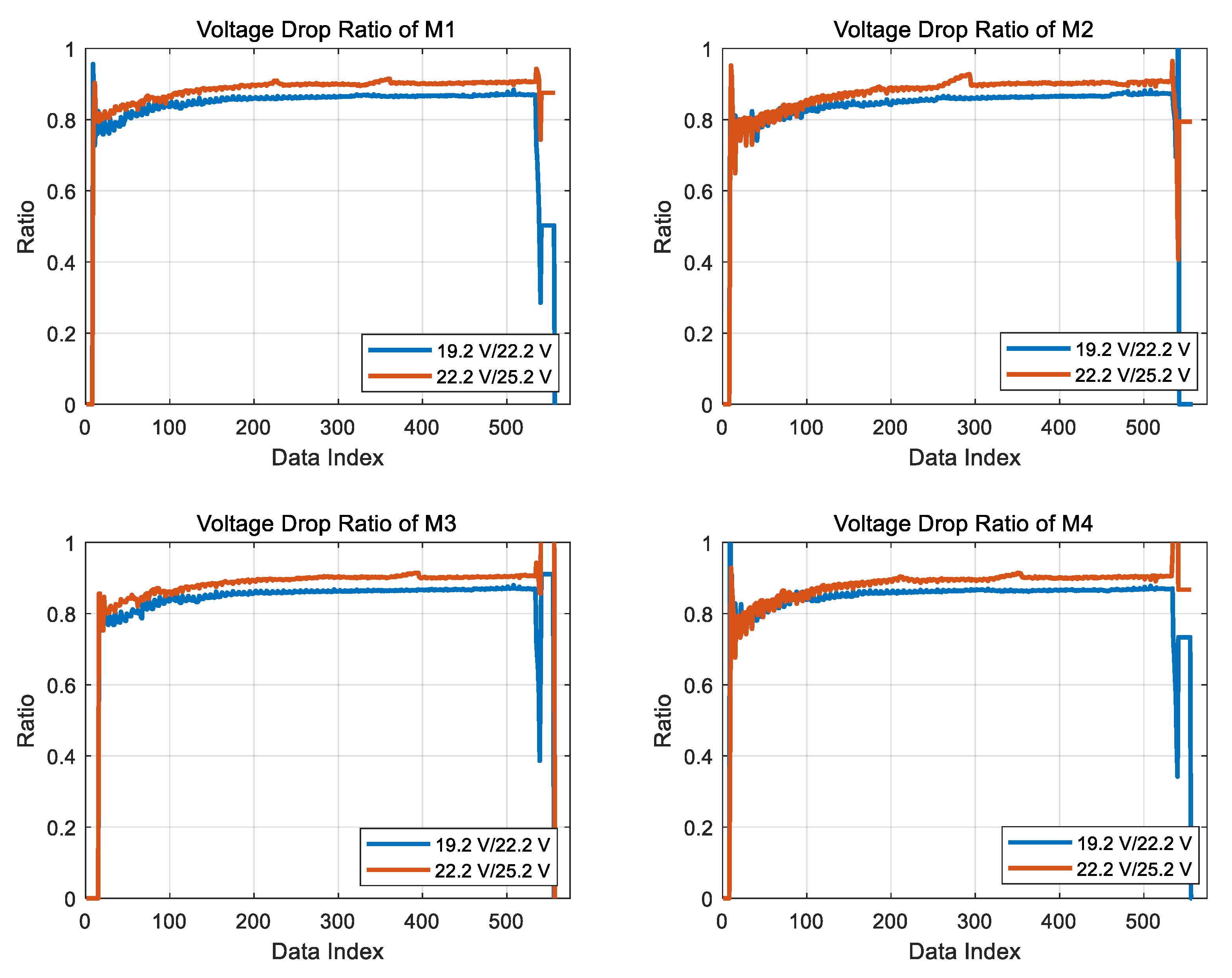
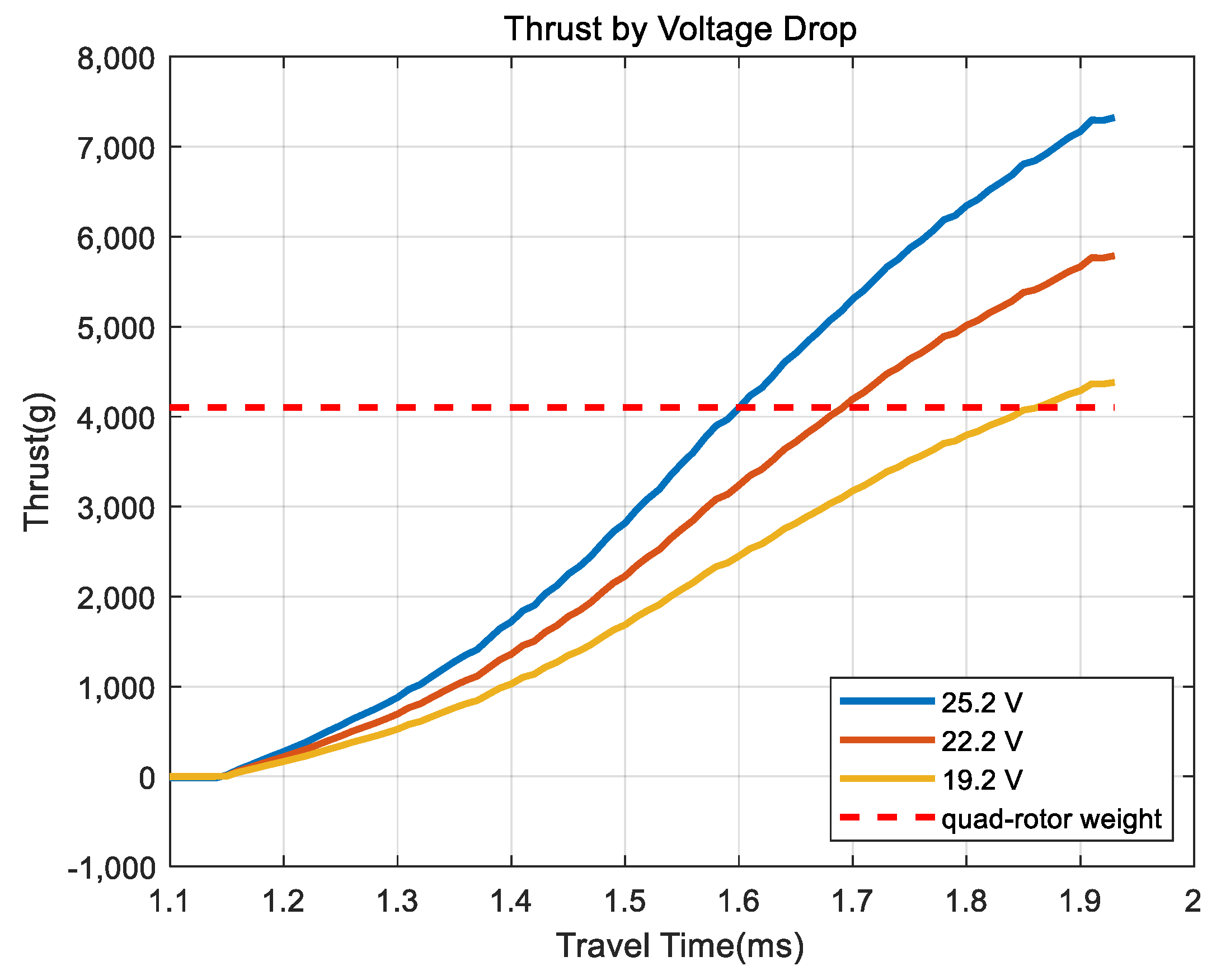
4.2. Relationship between Voltage Drop and Thrust
5. Conclusions
- (i)
- Create a thrust lookup table for each voltage of the entire control range of the actuator using Equations (11) and (12).
- (ii)
- Calculate the RPM and thrust of current voltages using the voltage drop ratio in Figure 13 and Equations (11) and (12).
- (iii)
- Estimate the correct motor control signals in the lookup table of i) using current voltages and the thrust calculated in ii).
Author Contributions
Funding
Conflicts of Interest
References
- Omari, S.; Hua, M.D.; Ducard, G.; Hamel, T. Hardware and software architecture for nonlinear control of multirotor helicopters. IEEE/ASME Trans. Mechatron. 2013, 18, 1724–1736. [Google Scholar] [CrossRef] [Green Version]
- Al-Saedi, F.A.T.; Sabar, R.A. Design and implementation of autopilot system for quadcopter. IJCSET 2015, 5, 190–199. [Google Scholar]
- Balasubramanian, E.; Vasantharaj, R. Dynamic Modeling and Control of Quad Rotor. Int. Eng. Technol. 2013, 5, 63–69. [Google Scholar]
- Elruby, A.Y.; El-Khatib, M.M.; El-Amary, N.H.; Hashad, A.I. Dynamic modeling and control of quadrotor vehicle. In Proceedings of the International Conference on Applied Mechanics and Mechanical Engineering (15th International Conference on Applied Mechanics and Mechanical Engineering), Cairo, Egypt, 29–31 May 2012; Volume 15, pp. 1–10. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Gandolfo, D.C.; Salinas, L.R.; Brandão, A.; Toibero, J.M. Stable path-following control for a quadrotor helicopter considering energy consumption. IEEE Trans. Control Syst. Technol. 2016, 25, 1423–1430. [Google Scholar] [CrossRef]
- Allouch, A.; Koubaa, A.; Khalgui, M.; Abbes, T. Qualitative and quantitative risk analysis and safety assessment of unmanned aerial vehicles missions over the internet. IEEE Access 2019, 7, 53392–53410. [Google Scholar] [CrossRef]
- Razinkova, A.; Kang, B.J.; Cho, H.C.; Jeon, H.T. Constant altitude flight control for quadrotor UAVs with dynamic feedforward compensation. Int. J. Fuzzy Log. Intell. Syst. 2014, 14, 26–33. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Liu, X.; Chen, J.; Fang, C. Altitude control for variable load quadrotor via learning rate based robust sliding mode controller. IEEE Access 2019, 7, 9736–9744. [Google Scholar] [CrossRef]
- Yang, S.; Xian, B. Energy-based nonlinear adaptive control design for the quadrotor UAV system with a suspended payload. IEEE Trans. Ind. Electron. 2019, 67, 2054–2064. [Google Scholar] [CrossRef]
- Poultney, A.; Kennedy, C.; Clayton, G.; Ashrafiuon, H. Robust tracking control of quadrotors based on differential flatness: Simulations and experiments. IEEE/ASME Trans. Mechatron. 2018, 23, 1126–1137. [Google Scholar] [CrossRef]
- İrfan, Ö. Mathematical Modelling and Simulation of Quadrotor. IOSR J. Electr. Electron. Eng. 2017, 12, 11–18. [Google Scholar]
- Nagaty, A.; Saeedi, S.; Thibault, C.; Seto, M.; Li, H. Control and navigation framework for quadrotor helicopters. J. Intell. Robot. Syst. 2013, 70, 1–12. [Google Scholar] [CrossRef]
- Sattar, M.A.; Ismail, A. Modeling and fuzzy logic control of a quadrotor UAV. Int. Res. J. Eng. Technol. 2017, 4, 1494–1498. [Google Scholar]
- Bouabdallah, S.; Murrieri, P.; Siegwart, R. Design and control of an indoor micro quadrotor. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4393–4398. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Specifications |
|---|---|
| Weight(including all electronic devices and battery) | 4104 g |
| Distance from motor to center | 48 cm |
| Blade diameter | 38.1 cm |
| Pitch | 11.43 cm |
| Signal controller | Atmel SAM3X8E ARM Cortex-M3 |
| BLDC Motor | Tarot 4114/320 kV |
| Electronic Speed Controls | Hobbywing XRotor 40 A |
| Loadcell | CAS BCL-20 L / 196.2 N |
| Coefficient | ||||
|---|---|---|---|---|
| A | 96,971.95 | 70,285.7 | 113,929.1 | 99,966.76 |
| B | −60,835 | −545,492 | −891,809 | −781,732 |
| C | 2,368,223 | 1,680,169 | 2,770,350 | 2,425,397 |
| D | −3,661,048 | −2,573,780 | −4,274,581 | −3,737,661 |
| E | 2,823,769 | 1,974,613 | 3,289,149 | 2,874,194 |
| F | −870,918 | −608,759 | −1,011,358 | −883,911 |
| R | 0.9998894 | 0.9999135 | 0.9998996 | 0.9999200 |
| 0.9997788 | 0.9998270 | 0.9997992 | 0.9998401 | |
| P | Less than 0.0001 | Less than 0.0001 | Less than 0.0001 | Less than 0.0001 |
| Voltage | M1(RPM) | M2(RPM) | M3(RPM) | M4(RPM) |
|---|---|---|---|---|
| 25.2 V | 7240 | 7635 | 7076 | 7603 |
| 22.2 V | 6569 | 6928 | 6409 | 6881 |
| 19.2 V | 5713 | 6051 | 5570 | 5977 |
| Time (s) | Loadcell (g) | ||||
|---|---|---|---|---|---|
| 1 | 3716 | 3634 | 3753 | 3923 | −4527.87 |
| 100 | 3632 | 3502 | 3635 | 3805 | −4164.27 |
| 200 | 3579 | 3444 | 3547 | 3721 | −3928.84 |
| 300 | 3503 | 3417 | 3524 | 3661 | −3811.55 |
| 400 | 3477 | 3383 | 3540 | 3642 | −3872.88 |
| 500 | 3478 | 3356 | 3503 | 3646 | −3688.79 |
| 600 | 3443 | 3328 | 3471 | 3608 | −3832.85 |
| 700 | 3410 | 3322 | 3498 | 3604 | −3726.53 |
| 800 | 3419 | 3315 | 3451 | 3576 | −3793.38 |
| 880.4 | 3344 | 3243 | 3374 | 3526 | −3537.16 |
| 932.96 | 2787 | 2706 | 2812 | 2898 | −2423.78 |
| RPM | ||||||||
|---|---|---|---|---|---|---|---|---|
| Error | Error | Error | Error | |||||
| 2440 | 3 | 7.713 × 10−5 | 9 | 7.166 × 10−5 | −7 | 7.261 × 10−5 | −26 | 7.048 × 10−5 |
| 3040 | 6 | 7.986 × 10−5 | −12 | 7.478 × 10−5 | −1 | 7.623 × 10−5 | −8 | 7.327 × 10−5 |
| 3520 | 5 | 7.982 × 10−5 | 2 | 7.857 × 10−5 | −4 | 7.882 × 10−5 | 12 | 7.538 × 10−5 |
| 4040 | 0 | 8.278 × 10−5 | −5 | 8.149 × 10−5 | −8 | 7.953 × 10−5 | 8 | 7.732 × 10−5 |
| 4400 | 2 | 8.410 × 10−5 | −6 | 8.302 × 10−5 | −9 | 8.080 × 10−5 | −9 | 7.858 × 10−5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jee, S.H.; Cho, H.C.; Kim, J. The Experimental Modeling of Quad-Rotor Actuators with Undefined Hardware Errors for Safety-Flight. Electronics 2020, 9, 579. https://doi.org/10.3390/electronics9040579
Jee SH, Cho HC, Kim J. The Experimental Modeling of Quad-Rotor Actuators with Undefined Hardware Errors for Safety-Flight. Electronics. 2020; 9(4):579. https://doi.org/10.3390/electronics9040579
Chicago/Turabian StyleJee, Sun Ho, Hyun Chan Cho, and Jongwon Kim. 2020. "The Experimental Modeling of Quad-Rotor Actuators with Undefined Hardware Errors for Safety-Flight" Electronics 9, no. 4: 579. https://doi.org/10.3390/electronics9040579