Deep LSTM with Dynamic Time Warping Processing Framework: A Novel Advanced Algorithm with Biosensor System for an Efficient Car-Driver Recognition


Abstract
:1. Introduction
2. Materials and Methods
2.1. The PPG Preprocessing Block
2.2. The DTW Processing Block
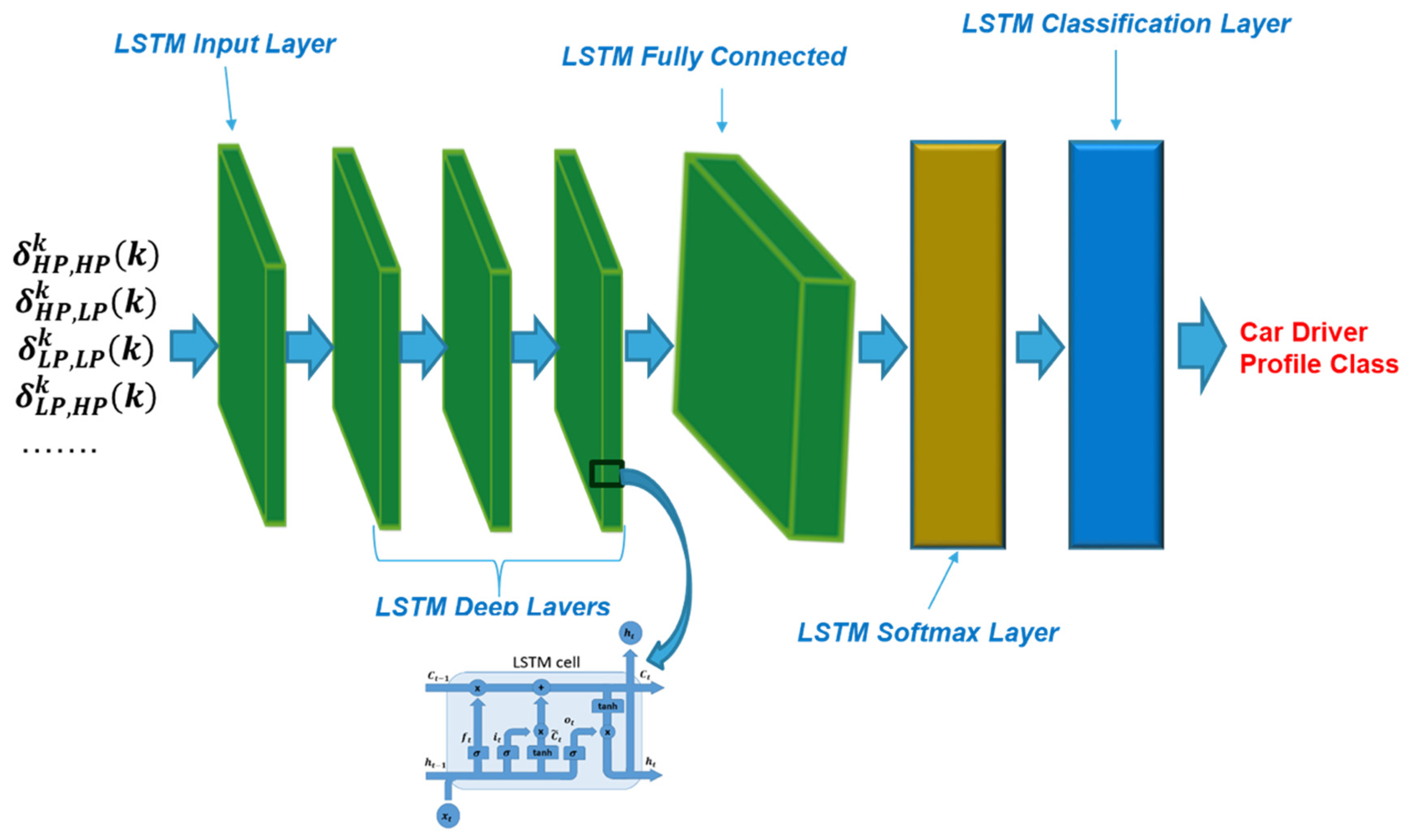
2.3. The Deep LSTM Processing Block
3. Results
4. Discussion and Conclusions
5. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Rundo, F.; Spampinato, C.; Conoci, S. Ad-Hoc Shallow Neural Network to Learn Hyper Filtered PhotoPlethysmoGraphic (PPG) Signal for Efficient Car-Driver Drowsiness Monitoring. Electronics 2019, 8, 890. [Google Scholar] [CrossRef] [Green Version]
- Conoci, S.; Rundo, F.; Fallica, G.; Lena, D.; Buraioli, I.; Demarchi, D. Live Demonstration of Portable Systems based on Silicon Sensors for the monitoring of Physiological Parameters of Driver Drowsiness and Pulse Wave Velocity. In Proceedings of the IEEE Proceedings of Biomedical Circuits and Systems Conference (BioCAS), Cleveland, OH, USA, 17–19 October 2018. [Google Scholar]
- Rundo, F.; Rinella, S.; Massimino, S.; Coco, M.; Fallica, G.; Parenti, R.; Conoci, S.; Perciavalle, V. An Innovative Deep Learning Algorithm for Drowsiness Detection from EEG Signal. Computation 2019, 7, 13. [Google Scholar] [CrossRef] [Green Version]
- Caber, N.; Langdon, P.M.; Clarkson, P.J. Intelligent Driver Profiling System for Cars—A Basic Concept. In Universal Access in Human-Computer Interaction. Virtual, Augmented, and Intelligent Environments; UAHCI 2018; Lecture Notes in Computer Science; Antona, M., Stephanidis, C., Eds.; Springer: Cham, Switzerland, 2018; Volume 10908. [Google Scholar]
- Ferreira, J., Jr.; Carvalho, E.; Ferreira, B.V.; de Souza, C.; Suhara, Y.; Pentland, A.; Pessin, G. Driver behavior profiling: An investigation with different smartphone sensors and machine learning. PLoS ONE 2017, 12, e0174959. [Google Scholar] [CrossRef] [PubMed]
- Dangra, B.S.; Rajput, D.; Bedekar, M.V.; Panicker, S.S. Profiling of automobile drivers using car games. In Proceedings of the 2015 International Conference on Pervasive Computing (ICPC), Pune, India, 8–10 January 2015; pp. 1–5. [Google Scholar]
- Kim, K.; Choi, H.; Jang, B. Design of the Driver-Adaptive Vehicle Interaction System. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 297–299. [Google Scholar]
- Mubasher, M.M.; Jaffry, S.W.; Jahangir, R. Modeling of individual differences in car-following behaviour of drivers. In Proceedings of the 2017 International Multi-topic Conference (INMIC), Lahore, Pakistan, 24–26 November 2017; pp. 1–7. [Google Scholar]
- Castignani, G.; Frank, R. SenseFleet: A smartphone-based driver profiling platform. In Proceedings of the 2014 Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Singapore, 30 June–3 July 2014; pp. 144–145. [Google Scholar]
- Ding, Z.; Xu, D.; Zhao, H.; Moze, M.; Aioun, F.; Guillemard, F. Driver Identification through Multi-state Car Following Modeling. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1580–1587. [Google Scholar]
- Rundo, F.; Conoci, S.; Ortis, A.; Battiato, S. An Advanced Bio-Inspired PhotoPlethysmoGraphy (PPG) and ECG Pattern Recognition System for Medical Assessment. Sensors 2018, 18, 405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taeihagh, A.; Lim, H.S.M. Governing autonomous vehicles: Emerging responses for safety, liability, privacy, cybersecurity, and industry risks. Transp. Rev. 2019, 39, 103–128. [Google Scholar] [CrossRef] [Green Version]
- Rundo, F.; Petralia, S.; Fallica, G.; Conoci, S. A Nonlinear Pattern Recognition Pipeline for PPG/ECG Medical Assessments. In Sensors; CNS 2018; Lecture Notes in Electrical Engineering; Andò, B., Baldini, F., di Natale, C., Ferrari, V., Marletta, V., Marrazza, G., Militello, V., Miolo, G., Rossi, M., Scalise, L., et al., Eds.; Springer: Cham, Switzerland, 2019; Volume 539. [Google Scholar]
- Banna, G.L.; Camerini, A.; Bronte, G.; Anile, G.; Addeo, A.; Rundo, F.; Zanghi, G.; Lal, R.; Libra, M. Oral metronomic vinorelbine in advanced non-small cell lung cancer patients unfit for chemotherapy. Anticancer Res. 2018, 38, 3689–3697. [Google Scholar] [CrossRef] [PubMed]
- Vinciguerra, V.; Ambra, E.; Maddiona, L.; Romeo, M.; Mazzillo, M.; Rundo, F.; Fallica, G.; di Pompeo, F.; Chiarelli, A.M.; Zappasodi, F.; et al. PPG/ECG multisite combo system based on SiPM technology. Lect. Notes Electr. Eng. 2019, 539, 105–109. [Google Scholar]
- Mazzillo, M.; Maddiona, L.; Rundo, F.; Sciuto, A.; Libertino, S.; Lombardo, S.; Fallica, G. Characterization of sipms with nir long-pass interferential and plastic filters. IEEE Photonics J. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Vinciguerra, V.; Ambra, E.; Maddiona, L.; Oliveri, S.; Romeo, M.F.; Mazzillo, M.; Rundo, F.; Fallica, G. Progresses towards a processing pipeline in photoplethysmogram (PPG) based on SiPMs. In Proceedings of the European Conference on Circuit Theory and Design (ECCTD), Catania, Italy, 4–6 September 2017; pp. 1–5. [Google Scholar]
- Hiroaki, S.; Chiba, S. Dynamic Programming Algorithm Optimization for Spoken Word Recognition. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 43–49. [Google Scholar]
- Paliwal, K.K.; Agarwal, A.; Sinha, S.S. A Modification over Sakoe and Chiba’s Dynamic Time Warping Algorithm for Isolated Word Recognition. Signal Process. 1982, 4, 329–333. [Google Scholar] [CrossRef]
- Rundo, F.; Trenta, F.; di Stallo, A.L.; Battiato, S. Grid Trading System Robot (GTSbot): A Novel Mathematical Algorithm for Trading FX Market. Appl. Sci. 2019, 9, 1796. [Google Scholar] [CrossRef] [Green Version]
- Trenta, F.; Conoci, S.; Rundo, F.; Battiato, S. Advanced Motion-Tracking System with Multi-Layers Deep Learning Framework for Innovative Car-Driver Drowsiness Monitoring. In Proceedings of the 2019 14th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2019), Lille, France, 14–18 May 2019; pp. 1–5. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Rundo, F.; Trenta, F.; Di Stallo, A.; Battiato, S. Advanced Markov-Based Machine Learning Framework for Making Adaptive Trading System. Computation 2019, 7, 4. [Google Scholar] [CrossRef] [Green Version]
- Rundo, F. Deep LSTM with Reinforcement Learning Layer for Financial Trend Prediction in FX High Frequency Trading Systems. Appl. Sci. 2019, 9, 4460. [Google Scholar] [CrossRef] [Green Version]
- STMicroelectronics SPC5 MCUs. Available online: https://www.st.com/en/automotive-microcontrollers/spc5-32-bit-automotive-mcus.html (accessed on 20 February 2020).
- STMicroelectronics ACCORDO 5 Automotive Microcontroller. Available online: https://www.st.com/en/automotive-infotainment-and-telematics/automotive-infotainment-socs.html?icmp=tt4379_gl_pron_nov2016 (accessed on 20 February 2020).
- Kavasidis, I.; Rundo, F.; Palazzo, S.; Rundo, F.; Giordano, D.; Messina, P.; Spampinato, C. A Saliency-Based Convolutional Neural Network for Table and Chart Detection in Digitized Documents. In Image Analysis and Processing—ICIAP 2019; Lecture Notes in Computer Science; Ricci, E., Rota Bulò, S., Snoek, C., Lanz, O., Messelodi, S., Sebe, N., Eds.; Springer: Cham, Switzerland, 2019; Volume 11752. [Google Scholar]
- Vecchio, G.; Palazzo, S.; Giordano, D.; Rundo, F.; Spampinato, C. MASK-RL: Multiagent Video Object Segmentation Framework through Reinforcement Learning. IEEE Trans. Neural Networks Learn. Syst. 2020. [Google Scholar] [CrossRef] [PubMed]
- Moshnyaga, V.G.; Shioyama, J.; Hashimoto, K. A Camera-Based Approach to Prevent Fingerprint Hacking. In Proceedings of the 2018 IEEE International Workshop on Signal Processing Systems (SiPS), Cape Town, South Africa, 21–24 October 2018; pp. 235–240. [Google Scholar]
- Shaojie, B.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Rundo, F.; Conoci, S.; Banna, G.L.; Stanco, F.; Battiato, S. Bio-Inspired Feed-Forward System for Skin Lesion Analysis, Screening and Follow-Up. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2017; Volume 10485, pp. 399–409. [Google Scholar]
- Rundo, F.; Conoci, S.; Banna, G.L.; Ortis, A.; Stanco, F.; Battiato, S. Evaluation of Levenberg–Marquardt neural networks and stacked autoencoders clustering for skin lesion analysis, screening and follow-up. IET Comput. Vis. 2018, 12, 957–962. [Google Scholar] [CrossRef]
- Ortis, A.; Rundo, F.; Di Giore, G.; Battiato, S. Adaptive Compression of Stereoscopic Images. In ICIAP 2013; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8156, pp. 391–399. [Google Scholar] [CrossRef] [Green Version]
- Rundo, F.; Banna, G.L.; Conoci, S. Bio-Inspired Deep-CNN Pipeline for Skin Cancer Early Diagnosis. Computation 2019, 7, 44. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter | Fc-pass-1 | Fc-pass-2 | Fc-pass-3 | Fc-pass-4 | Fc-pass-5 | Fc-pass-6 | Fc-pass-7 | Fc-pass-8 | Fc-pass-9 | Fc-pass-10 | Fc-pass-11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| High pass | 0.5 | / | / | / | / | / | / | / | / | / | / |
| Low pass | 1.15 | 1.21 | 2.30 | 2.65 | 3.14 | 3.24 | 4.25 | 4.56 | 5.80 | 5.95 | 6.50 |
| Filter | Fc-pass-1 | Fc-pass-2 | Fc-pass-3 | Fc-pass-4 | Fc-pass-5 | Fc-pass-6 | Fc-pass-7 | Fc-pass-8 | Fc-pass-9 | Fc-pass-10 | Fc-pass-11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| High pass | 0.55 | 1.4 | 2.7 | 2.91 | 3.75 | 3.90 | 4.4 | 4.85 | 5.75 | 5.65 | 6.90 |
| Low pass | 7 | / | / | / | / | / | / | / | / | / | / |
| Number of Car-Driver Identities Included in the Synthetic PPG Signal | Overall Discrimination Accuracy |
|---|---|
| 2 | 99.32% |
| 3 | 99.20% |
| 4 | 99.17% |
| 5 | 99.13% |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rundo, F. Deep LSTM with Dynamic Time Warping Processing Framework: A Novel Advanced Algorithm with Biosensor System for an Efficient Car-Driver Recognition. Electronics 2020, 9, 616. https://doi.org/10.3390/electronics9040616
Rundo F. Deep LSTM with Dynamic Time Warping Processing Framework: A Novel Advanced Algorithm with Biosensor System for an Efficient Car-Driver Recognition. Electronics. 2020; 9(4):616. https://doi.org/10.3390/electronics9040616
Chicago/Turabian StyleRundo, Francesco. 2020. "Deep LSTM with Dynamic Time Warping Processing Framework: A Novel Advanced Algorithm with Biosensor System for an Efficient Car-Driver Recognition" Electronics 9, no. 4: 616. https://doi.org/10.3390/electronics9040616