Novel Summation-Type Triggering Condition on Event-Based Memory Output Feedback Control for Networked Control Systems


Abstract
:1. Introduction
2. Problem Statement and Preliminaries
3. The Memory Control and Novel Summation-Type Event-Triggered Condition
4. Main Results
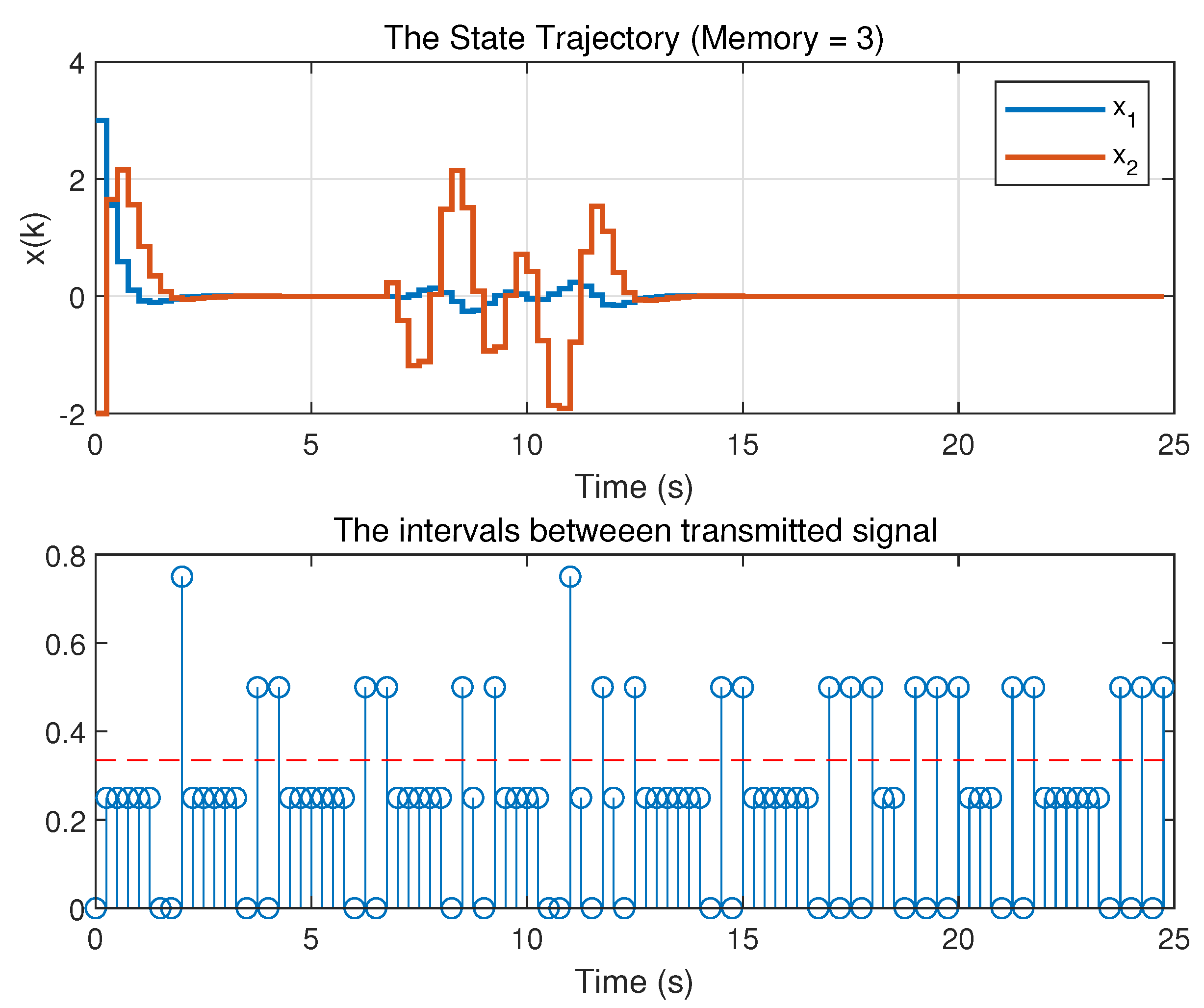
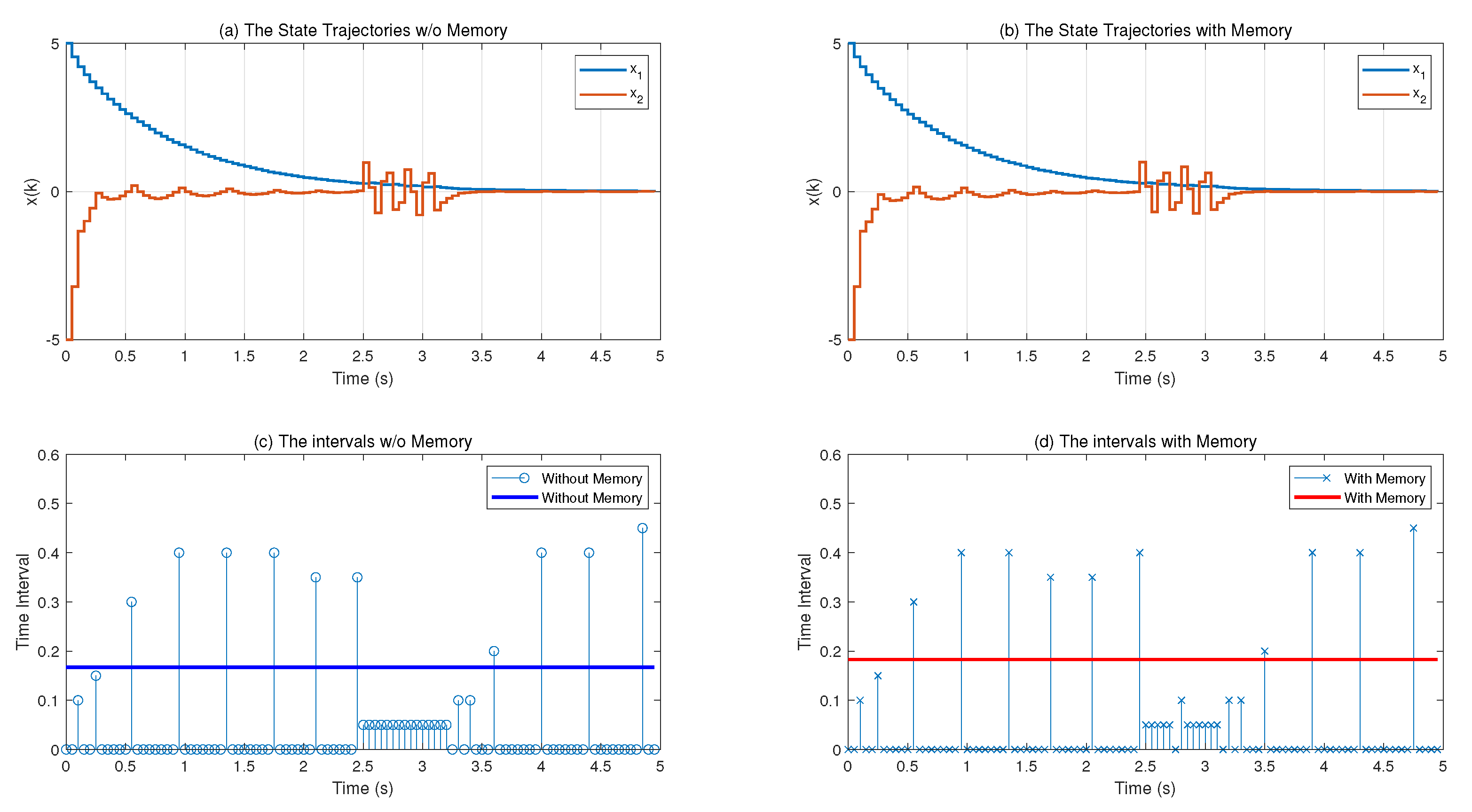
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tipsuwan, Y.; Chow, M.Y. Control methodologies in networked control systems. Control. Eng. Pract. 2003, 11, 1099–1111. [Google Scholar] [CrossRef]
- Lian, F.L.; Moyne, J.; Tilbury, D. Network design consideration for distributed control systems. IEEE Trans. Control. Syst. Technol. 2002, 10, 297–307. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Yu, X. Survey on recent advances in networked control systems. IEEE Trans. Ind. Inform. 2015, 12, 1740–1752. [Google Scholar] [CrossRef]
- Wang, F.Y.; Liu, D. Networked Control Systems: Theory and Applications; Springer: London, UK, 2008. [Google Scholar]
- Bemporad, A.; Heemels, M.; Johansson, M. Networked Control Systems; Springer: Berlin/Heidelberg, Germany, 2010; Volume 406. [Google Scholar]
- Heemels, W.M.H.; Teel, A.R.; Van de Wouw, N.; Nesic, D. Networked control systems with communication constraints: Tradeoffs between transmission intervals, delays and performance. IEEE Trans. Autom. Control 2010, 55, 1781–1796. [Google Scholar] [CrossRef]
- Chen, H.; Gao, J.; Shi, T.; Lu, R. H∞ control for networked control systems with time delay, data packet dropout and disorder. Neurocomputing 2016, 179, 211–218. [Google Scholar] [CrossRef]
- Xiong, J.; Lam, J. Stabilization of linear systems over networks with bounded packet loss. Automatica 2007, 43, 80–87. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Johansson, K.H.; Tabuada, P. An introduction to event-triggered and self-triggered control. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Xu, Q.; Zhang, Y.; He, W.; Xiao, S. Event-triggered networked H∞ control of discrete-time nonlinear singular systems. Appl. Math. Comput. 2017, 298, 368–382. [Google Scholar] [CrossRef]
- Yin, X.; Yue, D.; Hu, S. Distributed event-triggered control of discrete-time heterogeneous multi-agent systems. J. Frankl. Inst. 2013, 350, 651–669. [Google Scholar] [CrossRef]
- Xue, A.; Wang, H.; Lu, R. Event-based H∞ control for discrete markov jump systems. Neurocomputing 2016, 190, 165–171. [Google Scholar] [CrossRef]
- Li, H.; Liao, X.; Chen, G.; Hill, D.J.; Dong, Z.; Huang, T. Event-triggered asynchronous intermittent communication strategy for synchronization in complex dynamical networks. Neural Netw. 2015, 66, 1–10. [Google Scholar] [CrossRef]
- de Wouw, V.; Nathan; Nešić, D.; Heemels, W.P.M.H. A discrete-time framework for stability analysis of nonlinear networked control systems. Automatica 2012, 48, 1144–1153. [Google Scholar] [CrossRef]
- Eqtami; Alina; Dimarogonas, D.V.; Kyriakopoulos, K.J. Event-triggered control for discrete-time systems. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 4719–4724. [Google Scholar]
- Zhang, X.M.; Han, Q.L.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2019, 7, 1–17. [Google Scholar] [CrossRef]
- Li, F.; Fu, J.; Du, D. A novel decentralised event-triggered l∞ control for network control systems with communication delays. Int. J. Syst. Sci. 2016, 47, 3098–3115. [Google Scholar] [CrossRef]
- Zhang, T.; Li, J. Asynchronous event-triggered control of multi-agent systems with sigma-delta quantizer and packet losses. J. Frankl. Inst. 2016, 353, 1781–1808. [Google Scholar] [CrossRef]
- Shi, P.; Wang, H.; Lim, C.C. Network-based event-triggered control for singular systems with quantizations. IEEE Trans. Ind. Electron. 2015, 63, 1230–1238. [Google Scholar] [CrossRef] [Green Version]
- Dolk, V.; Heemels, M. Event-triggered control systems under packet losses. Automatica 2017, 80, 143–155. [Google Scholar] [CrossRef]
- Stöcker, C.; Lunze, J. Input-to-state stability of event-based state-feedback control. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2019; pp. 1145–1150. [Google Scholar]
- Wu, W.; Reimann, S.; Görges, D.; Liu, S. Event-triggered control for discrete-time linear systems subject to bounded disturbance. Int. J. Robust Nonlinear Control 2016, 26, 1902–1918. [Google Scholar] [CrossRef]
- Yan, S.; Zhang, G.; Li, T.; Shen, M.; Li, L. H∞ Static Output Control of Discrete-Time Networked Control Systems with an Event-Triggered Scheme. Circuits Syst. Signal Process. 2018, 37, 553–568. [Google Scholar] [CrossRef]
- Liu, J.; Zha, L.; Xie, X.; Tian, E. Resilient observer-based control for networked nonlinear T–S fuzzy systems with hybrid-triggered scheme. Nonlinear Dyn. 2018, 91, 2049–2061. [Google Scholar] [CrossRef]
- Hu, S.; Yue, D.; Peng, C.; Xie, X.; Yin, X. Event-triggered controller design of nonlinear discrete-time networked control systems in TS fuzzy model. Appl. Soft Comput. 2015, 30, 400–411. [Google Scholar] [CrossRef]
- Kwon, W.; Koo, B.; Lee, S.M. Integral-based event-triggered synchronization criteria for chaotic Lur’e systems with networked PD control. Nonlinear Dyn. 2018, 94, 991–1002. [Google Scholar] [CrossRef]
- Tian, E.; Wang, K.; Zhao, X.; Shen, S.; Liu, J. An improved memory-event-triggered control for networked control systems. J. Frankl. Inst. 2019, 356, 7210–7223. [Google Scholar] [CrossRef]
- Chen, J.; Xu, S.; Ma, Q.; Li, Y.; Chu, Y.; Zhang, Z. Two novel general summation inequalities to discrete-time systems with time-varying delay. J. Frankl. Inst. 2017, 354, 5537–5558. [Google Scholar] [CrossRef]
- Park, J.H.; Lee, T.H.; Liu, Y.; Chen, J. Dynamic Systems with Time Delays: Stability and Control; Springer: Singapore, 2019. [Google Scholar]
- Boyd, S.; ElGhaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Memory | Controller Gain | Controller Gain | Controller Gain | Controller Gain |
|---|---|---|---|---|
| 0 | - | - | - | |
| 1 | - | - | ||
| 2 | - | |||
| 3 |
| Memory | Average Transmission Rate | Total Transmitted Signal |
|---|---|---|
| 0 | 0.3103 | 79 |
| 1 | 0.3182 | 77 |
| 2 | 0.3300 | 75 |
| 3 | 0.3345 | 74 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, W.; Baek, J. Novel Summation-Type Triggering Condition on Event-Based Memory Output Feedback Control for Networked Control Systems. Electronics 2020, 9, 779. https://doi.org/10.3390/electronics9050779
Kwon W, Baek J. Novel Summation-Type Triggering Condition on Event-Based Memory Output Feedback Control for Networked Control Systems. Electronics. 2020; 9(5):779. https://doi.org/10.3390/electronics9050779
Chicago/Turabian StyleKwon, Wookyong, and Jaemin Baek. 2020. "Novel Summation-Type Triggering Condition on Event-Based Memory Output Feedback Control for Networked Control Systems" Electronics 9, no. 5: 779. https://doi.org/10.3390/electronics9050779