Abstract
The positions of millisecond pulsars (MSPs) can be determined with sub-milliarcsecond (mas) accuracy using both Very Long Baseline Interferometry (VLBI) and timing, referenced to the International Celestial Reference Frame (ICRF) and planetary ephemerides frame, respectively, representing kinematic and dynamical reference frames. The two frames can be connected through observations of common celestial objects, MSPs observed with VLBI and timing. However, previous attempts to establish this connection were unreliable due to the limited number of MSPs observed by both techniques. Currently, 23 MSPs have been precisely measured using both multiple timing and VLBI networks. Among them, 17 MSPs are used to link the two reference frames, marking a significant three-fold increase in the number of common MSPs used for frame linking. Nevertheless, six MSPs located near the ecliptic plane are excluded from frame linkage due to positional differences exceeding 20 mas measured by VLBI and timing. This discrepancy is primarily attributed to errors introduced in fitting positions in timing methods. With astrometric parameters obtained via both VLBI and timing for these MSPs, the precision of linking DE436 and ICRF3 has surpassed 0.4 mas. Furthermore, thanks to the improved timing precision of MeerKAT, even with data from just 13 MSPs observed by both MeerKAT and VLBI, the precision of linking DE440 and ICRF3 can also exceed 0.4 mas. The reliability of this linkage depends on the precision of pulsar astrometric parameters, their spatial distribution, and discrepancies in pulsar positions obtained by the two techniques. Notably, proper motion differences identified by the two techniques are the most critical factors influencing the reference frame linking parameters. The core shift of the calibrators in VLBI pulsar observations is one of the factors causing proper motion discrepancies, and multi-wavelength observations are expected to solve it. With the improvement in timing accuracy and the application of new observation modes like multi-view and multi-band observations in VLBI, the linkage accuracy of the dynamical and kinematic reference frames is expected to reach 0.3 mas.
1. Introduction
The construction and maintenance of the celestial reference system (CRS) and the celestial reference frame (CRF) is the fundamental task of astrometry. The CRF is realized by catalogs of positions of celestial objects in different bands, such as optical, radio, infrared and other wavebands [1]. The CRF can be divided into two catalogs: kinematic and dynamical reference frames. Accurate kinematic frames, such as the ICRF, are realized with compact extragalactic objects whose radio frequency positions are mostly accurately measured at the sub-mas scale by VLBI. ICRF1 includes 608 radio sources across the sky, with 212 defining sources used to maintain the stability of the reference frame [2]. ICRF2 significantly improves the number and accuracy of radio sources, with a total of 3414 radio sources, and the number of defining sources increased to 295 [3]. The ICRF3, published in 2020, further increases the number of radio sources, with more than 4000 radio sources having an accuracy better than 1 mas and 300 radio sources having a positional accuracy better than 0.1 mas [4]. Thus, from ICRF1 to ICRF3 there has been a remarkable improvement in both the number and accuracy of radio sources, providing more reliable and precise data support for astronomical observations, Earth Orientation Parameter (EOP) determination, and related research.
The dynamical frame, such as the solar system ephemeris, is generated by fitting numerically integrated orbits of the Moon and planets to observations [5,6,7,8,9,10,11]. In a solar system ephemeris, the relative orientations of the inner planets are derived primarily from high-precision ranging, Doppler data, VLBI and so on. The construction of reference frames for kinematics and dynamics differs significantly: the former relies on precise astronomical parameters including the positions, velocities, and parallaxes of celestial bodies, while the latter requires a detailed analysis of the forces acting on major celestial bodies within the Solar System and is defined dynamically. Comparing astrometric catalogs or reference frames is a routine procedure used for the improvement of the CRF in the sense of stochastic and systematics errors, as well as for CRF accuracy assessment [1]. Accurate alignments among celestial reference frames at different wavelengths are crucial for identifying multi-wavelength counterparts [12] and ensuring precision in applications such as VLBI tracking of spacecraft in deep space missions [13,14]. The Jet Propulsion Laboratory (JPL) Planetary and Lunar Development Ephemeris (DE) DE405, once widely used, referenced the orientations of the ephemerides first to ICRF1 [9]. It is claimed that DE430 is tied to ICRF1 with an average accuracy of 0.2 mas [7], but the accuracy may have been overestimated or we did not find the argumentation of [7] compelling because of the following reasons: (1) Such an estimation is only based on the VLBI delay residuals of the Goldstone–Madrid and Goldstone–Canberra baselines; (2) the connection between the ephemeris and the ICRF is solely based on observations of inner planets; (3) these VLBI data are also used to establish the ephemeris, which introduces a certain degree of correlation. Therefore, we would like to perform our own independent study to check the claim of [7]. The latest DE440 and DE441 are linked to ICRF3 with an average accuracy of 0.2 mas [8]. In addition to the traditional single-baseline VLBI and ranging data, the comparison is also combined with VLBA measurements of Mars orbiting satellites [8]. Similarly, our external reference frame connection method aids in externally verifying the accuracy of this connection.
In addition, objects listed in ICRF3 have been used to align the Gaia DR2 catalog to the ICRS, and this approach will be applied to the final Gaia catalog as well. The Gaia CRF, another type of kinematic frame, is formally defined by the astrometric parameters measured by Gaia. Ideally, these parameters should remain non-rotating relative to distant extragalactic sources, consistent with the ICRS, and consistent across all magnitudes [15]. The positional accuracy of Gaia’s bright sources can reach tens of μas. By analyzing the positional discrepancies of common sources across different frames, we can assess the potential systematic errors and determine the orientation parameters between them [1]. The VLBI data for the 26 best-fitting sources indicate that the bright reference frame of Gaia DR2 rotates relative to the faint quasars at a rate of 0.1 mas yr−1 at the 2 level [15].
Furthermore, the common millisecond pulsars (MSPs) measured by different techniques can also serve as a link between different reference frames. Because of the pulsar’s faint radiation, VLBI observations involve targeting pulsars alongside their in-beam or nearby (within 5°) reference calibrators, which are compact extragalactic objects in the ICRF. Consequently, VLBI pulsar astrometric data align with the ICRF [16]. The positional accuracy of pulsars determined through VLBI can reach the sub-mas level, such as PSR J1910+1256 [17]. High-precision pulsar positions can also be acquired through timing observations. By analyzing pulsar times of arrival (ToAs) and employing models for each pulsar’s astrometric, rotational and orbital properties, precise pulsar positions are derived by fitting the amplitude and phase of the sinusoidal signals using pulsar timing software like TEMPO2 [18,19]. The pulsar astrometric data from the timing observations are tied to an ephemeris. MSPs, due to their exceptional stability, offer positional accuracy at the mas or even sub-mas level with the timing far surpassing that of young pulsars with typical periods of around 1 s [20]. MSPs jointly measured by both VLBI and timing enable an accurate linkage between the ICRF and the ephemeris. However, previous efforts to establish this connection were unreliable, primarily due to the limited number of MSPs observed by both techniques [20,21]. The inclusion or removal of one single MSP can significantly impact the results of the reference frame connection. Fortunately, recent advancements have led to a threefold increase in the number of MSPs jointly measured by timing and VLBI, now totaling 23. Based on these enriched data, the results of the reference frame connection will be more robust. In this study, we will compare two ICRF and ephemeris frames using pulsar data, examining the factors influencing the precision of the orientation parameters between these frames.
2. Data and Methods
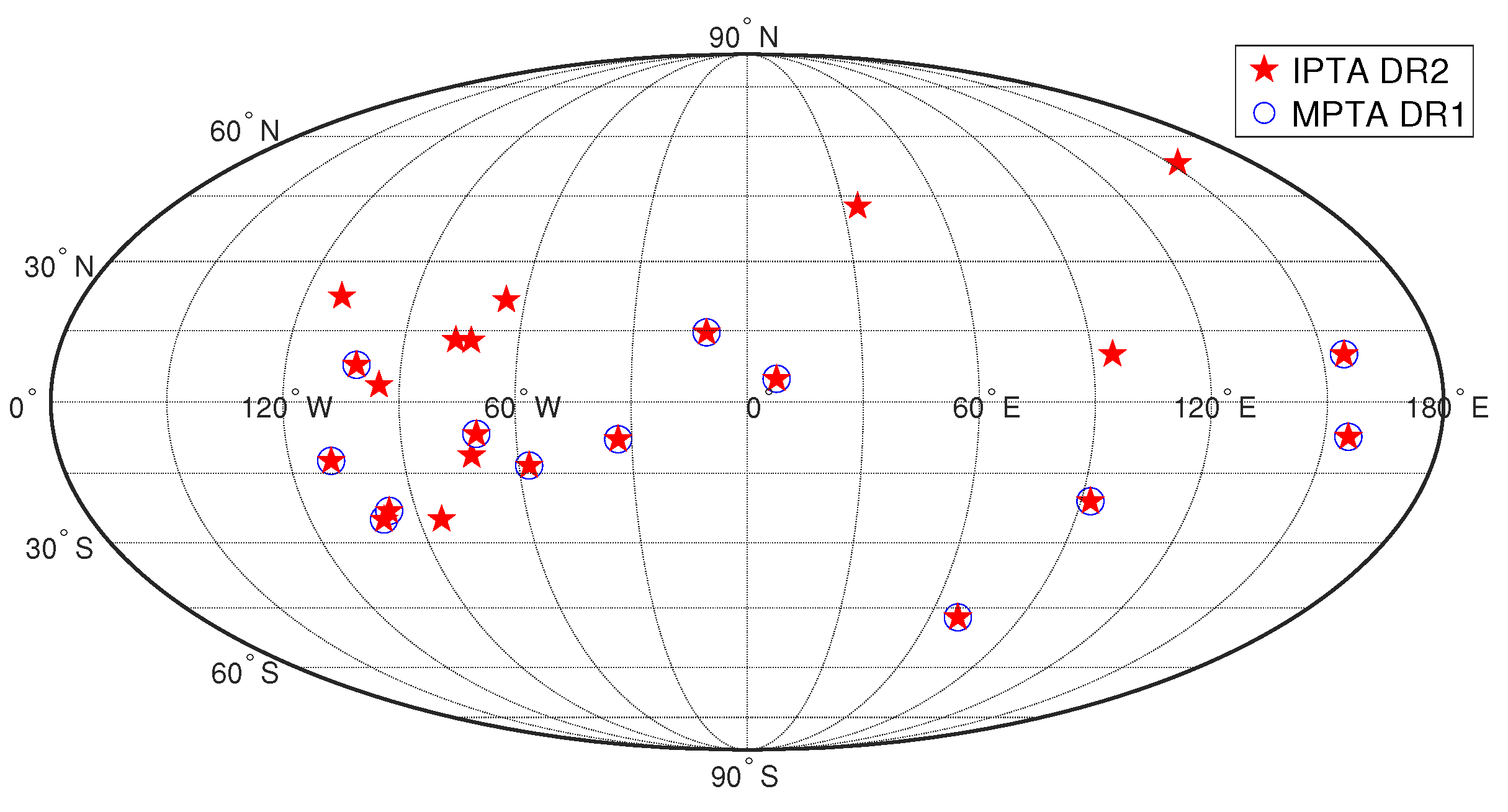
By analyzing the positional discrepancies of common pulsars, particularly MSPs, using different techniques, the accuracy of the connecting frames has now reached the mas level [20,21]. Notably, the inclusion of young pulsars jointly measured by timing and VLBI does not improve the accuracy of reference frame connections [20,21]. Therefore, our estimation of orientation parameters between frames relies solely on common MSPs with precise astrometric parameters derived from both timing and VLBI. The timing datasets utilized are primarily from the International Pulsar Timing Array (IPTA) second data release (DR2) [22,23] and the MeerKAT Pulsar Timing Array (MPTA) first data release (DR1) [24,25]. The VLBI pulsar positions are obtained from published research (e.g., [16,17,26,27,28,29]). The distribution of these common MSPs is shown in Figure 1, where the positions of 23 MSPs are referenced to ICRF3 in the equatorial coordinate system, with MSPs from IPTA DR2 shown in red and those from MTPA DR1 in blue. Consequently, based on these datasets, a connection can be established between ICRF3 and the dynamical reference frame.
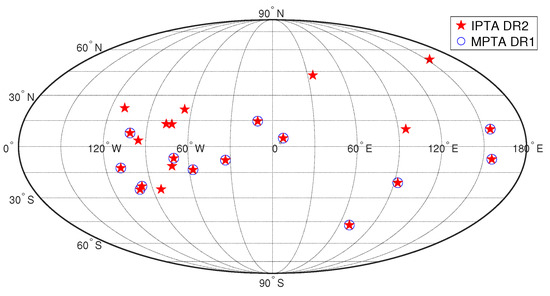
Figure 1.
Spatial distribution of 23 MSPs measured via VLBI and timing in the equatorial coordinate system. The red star indicates MSPs from IPTA DR2, while blue circles represent MSPs from MPTA DR1.
2.1. Timing Data
The positional accuracy of MSPs is closely related to their timing accuracy. Currently, the MSPs with the highest timing accuracy are primarily measured by the Pulsar Timing Array (PTA) [23], which aims to detect low-frequency nanohertz gravitational waves (GWs). High-precision timing observations have been obtained from several PTAs, including the European Pulsar Timing Array (EPTA), the North American Nanohertz Observatory for Gravitational Waves (NANOGrav), the Parkes Pulsar Timing Array (PPTA) in Australia, the MeerKAT Pulsar Timing Array in South Africa (MPTA) [24,25], and the Chinese Pulsar Timing Array (CPTA), with observations by the Five-hundred-meter Aperture Spherical Radio Telescope (FAST) [30] and MPTA [24,25]. Currently, pulsar timing residuals estimated by these arrays are at the microsecond (μs) level, with FAST distinguished by its ultra-high sensitivity, providing even better timing accuracy [30]. As the astronomical results from FAST have not been published, we primarily use the results from the other PTAs mentioned above.
The IPTA DR2 includes 65 MSPs regularly observed by EPTA, NANOGrav and PPTA, expanding from the 49 MSPs of the IPTA DR1 [23]. The IPTA DR2 includes a separate timing solution with barycentric coordinate time (TCB) and barycentric dynamic time (TDB) units. The two versions differ in the modeling of the dispersion measure (DM) variation and the handling of pulsar noise properties. A comparison between them shows that the general features of the variations are consistent within their uncertainties. The uncertainties of IPTA DR2 are generally improved compared to IPTA DR1, mainly due to the more precise timing data in the combination. The IPTA DR2 is available at http://www.ipta4gw.org (accessed on 9 December 2024) [23]. We use version A and TDB units for our analysis.
The MeerKAT radio telescope is a 64-antenna interferometer located in the northern Karoo region of South Africa and is the precursor to the forthcoming Square Kilometer Array Mid telescope [24,25,31,32]. MeerKAT’s DR1 contains a total of 88 MSPs observed at frequencies between 856 MHz and 1712 MHz. Although its timing span is much shorter than that of IPTA, with a duration of only 2.5 yr, the timing dataset has been extended to ∼3 yr by adding all the data taken after DR1 and up to May 2022 [25]; the timing precision is sufficiently high, with timing residuals better than 1 μs for 67 of them [24,25]. There are a total of 13 MSPs in the MPTA that can be used for reference frame connection. The MSPs jointly observed by MeerKAT and VLBA are PSR J0030+0451, J0610-2100, J1024-0719, J1643-1224, J1721-2457, J1730-2304, J1918-0642 and all MSPs from MeerKAT and VLBI are shown in Figure 1. The astrometric parameters for these MSPs are related to DE440 [25]. Table 1 shows the astrometric parameters of the MSPs related to DE436 at Modified Julian Date (MJD) 55000.0, which we computed from the data of IPTA DR2 [23] that have common observations with VLBI. In Table 1 is the right ascension of the pulsar, is the declination of the pulsar, and are the proper motion in the two directions, is the parallax of the pulsar. PSR J1022+1001 is not included in Table 1, which is very close to the ecliptic plane, and the position of such pulsars is difficult to fit well into the equatorial coordinate system by timing [33]. The differences in PSR J1022+1001 by VLBI and timing are large, up to ∼60 mas in declination, which is not suitable for use in frame linking [20]. As shown in Table 1, not all MSPs, such as PSR J0610-2100 and J0621+1002, can be fitted with parallax values by timing. For such pulsars, the parallax values obtained by VLBI are used in subsequent position calculations.

Table 1.
Pulsar Astrometric Parameters referred to DE 436 for IPTA DR 2 in the equatorial coordinate system.
In pulsar timing observations, the precision of the observed TOA directly determines the precision of the pulsar’s astrometric parameters, and the theoretical precision of TOA satisfies the following formula [34]),
Here, is the flux density of the pulsar, and are the receiver and sky noise temperatures, G is the antenna gain, is the observing bandwidth, tint is the integration time, W is the pulse width and P is the pulse period (we assume ). Based on this formula, it becomes evident that various factors, including the pulsar period, flux density, pulse width, antenna gain, receiver system temperature, observation bandwidth, and integration time, all contribute to the ultimate precision of the Time of Arrival (TOA). Furthermore, the interstellar medium, the jitter of the pulsar itself, and red noise can also affect the determination of the pulsar’s astrometric parameters. It is worth noting here that the position of a pulsar obtained through timing methods is closely tied to the specific version of the ephemeris used. The measured TOAs in pulsar timing, , are related to the rotational phase, , of the pulsar at the time of emission as follows:
where
Here, is the time of pulse emission, and are, respectively, the vectors from the solar system barycenter (SSB) to the geo-center and from the geo-center to the observatory at time , and R is a unit vector from the SSB toward the pulsar [35]. accounts for numerous other delays not discussed here (see, e.g., [18]). is obtained from the ephemeris, which directly affects TOAs’ precision. The SSB’s position can be calculated by summing over all solar system bodies’ positions weighted by their masses (including the Sun) by , where is the mass of the body and the vector position of the body [35]. The accuracy of celestial bodies’ masses and positions influences the SSB’s positional accuracy, affecting TOA precision. Different ephemerides use varying amounts and precisions of data, leading to discrepancies in Earth’s center position relative to the SSB and pulsar positions derived from timing data. For instance, how Pluto’s mass affects timing data depend on the differences in Pluto’s mass measured by different versions of the ephemeris, as well as variations in Pluto’s position relative to the SSB. Therefore, besides various error factors, discrepancies in pulsar positions may also stem from the use of different ephemeris versions [20,21,36]. The precision of these ephemerides varies based on the quantity and accuracy of the observational data used in their compilation. As the volume and quality of observational data increase, the precision of solar system ephemerides also improves. Currently, the most advanced versions are DE440 and DE441. However, the orbits of inner planets are still tied to ICRF by VLBI measurements of Mars-orbiting spacecraft [8]. There is currently no relevant research on the directional influence of outer planets on solar system ephemerides. Furthermore, with the continuous improvement of timing accuracy, the timing precision of 35 MSPs currently measured by FAST is already better than 100 ns [30]; the systematic error in the planetary ephemerides is recognized as one of the main error sources that may degrade the sensitivity of the detection of GWs [37]. Importantly, the advancement in pulsar timing accuracy enables the independent detection of errors in ephemerides [38] and the determination of orientation accuracy, irrespective of the ephemeris used. This paper undertakes an external verification of the orientation accuracy of ephemerides by comparing pulsar timing data with VLBI data results.
2.2. VLBI Data
It is worth noting that the pulsar VLBI method discussed in this paper specifically employs the VLBI phase-referencing observation technique, which is a differential VLBI technique designed for observing weak sources, rather than a traditional absolute VLBI measurement method. Consequently, it exhibits significant differences from conventional absolute VLBI observations of extragalactic radio sources in terms of principles, data analysis, and error analysis. The parallax and transverse velocity of pulsars estimated by the VLBI phase-referencing method provide model-independent values that allow consistency checks between different reference frames (e.g., [16,17,22]), as shown by Table 2. Specifically, the first to seventh columns in Table 2 present, respectively, the names and references of pulsars, the reference epoch of their positions, right ascension and declination with errors, proper motion (with error), and parallax (with error). The accuracy of the absolute position of the calibrator, a contribution from the frequency-dependent core shift of the calibrator and the accuracy of the determination of the position offsets between the pulsar and calibrator contribute to the final accuracy of the pulsar positions [28,29]. Astrometric parameters of young pulsars estimated by VLBI, at the mas level or better, are theoretically more precise than those measured by timing. In the astrometric database of 60 pulsars (only four MSPs) in PSR, the obtained parallax-based distance measurements for all but 3, with a parallax precision typically 45 μas [29], were far more accurate than those determined by timing. In the pulsar VLBI phase-referencing method, five main factors are expected to influence the total uncertainty of a position estimation in a given epoch: 1. pulsar flux density; 2. calibrator flux density; 3. pulsar-calibrator angular separation; 4. ionospheric conditions and average observing elevation; 5. calibrator stability [29]. It can be inferred from this that the astrometric parameters of pulsars obtained through the VLBI phase-referencing method have little direct correlation with whether the pulsar is an MSP. Consequently, the astrometric parameters of young pulsars derived from the VLBI phase-referencing method are more precise. The astrometric parameters of these young pulsars in pulsar catalogs are those determined by VLBI, rather than those obtained through timing.
Table 2.
Pulsar Astrometric Parameters for VLBI in the equatorial coordinate system.
The consistency of ICRF1 and ICRF2 is zero with an uncertainty of 0.02 mas, and the rotation between them is also estimated [40]. The new realization of ICRF3, which follows the first realization of ICRF1 established in 1997 and its successor ICRF2 adopted in 2009, is complemented with data obtained at higher radio frequencies (24 GHz and dual frequency 32 and 8.4 GHz) and aligned to ICRF2 with a mean positional uncertainty of about 0.1 mas in right ascension and 0.2 mas in declination [4]. Pulsar VLBI phase-referencing observations observed and published at different times may refer to different versions of the ICRF. Since there may be positional differences between different versions of the ICRF for the same radio source, the pulsar referenced to that radio source may show slight differences. However, since there are no rotation differences between different versions of the ICRF, we uniformly take ICRF3 as the reference for the pulsar position values and apply a conversion to account for the positional differences of the radio source to the pulsar location. Due to the relatively faint radiation of pulsars, the number of MSPs measured using VLBI phase-referencing techniques is limited. Early observations relied mainly on the Australian Long Baseline Array (LBA) network [26], the Very Long Baseline Array (VLBA) network [16], and the European VLBI Network (EVN) [33,39] to determine the precise parallaxes and positions of several MSPs. In recent years, the MSP project of the VLBA has continuously observed a group of MSPs, with 18 MSPs measured by this project published in [17]. This paper integrates the astrometric parameters of these VLBI-observed pulsars for reference frame linking. The VLBI astrometric parameters of the pulsars are linked to the ICRF3 [17].
2.3. All Datasets
The positions of pulsars obtained by timing have a significant relationship with their distance from the ecliptic plane. For pulsars close to the ecliptic plane, it is difficult to obtain a good fit for their positions by timing [29,33]. In contrast, the VLBI method can provide highly accurate astrometric parameters for such pulsars. Table 2 compares these MSPs’ astrometric discrepancies obtained by timing and VLBI methods. In the MSP project, several MSPs are located near the ecliptic plane, including PSR J1721-2457, PSR J1730-2304, and PSR J1824-2452A. The positions of these pulsars derived from timing and VLBI show significant differences, especially in their proper motions in the direction of declination, which are all greater than 1 mas yr−1. Therefore, these pulsars are not included in the reference frame bindings.
In addition, PSR J1024-0719 has a companion with an orbital period of several kilo-years [41]. Parameters of this pulsar, especially those related to the binary system, can vary significantly over different periods. As a result, large errors can be introduced into the calculations for reference frame constraints. PSR J0437-4715 is one of the most accurately measured pulsars by both techniques. Despite the earlier timing of the VLBI measurements, its sufficiently high precision still makes it the best candidate source for reference frame ties.
Since the majority of pulsars currently measured are within the Milky Way, their proper motions and distances are on the order of mas yr−1 and kpc, respectively, which can lead to significant differences in the absolute positions of the same pulsar at different epochs. The 317 pulsars that have been discovered in 41 globular clusters in the Milky Way are mostly millisecond pulsars with rotation periods in the tens of millisecond range. Of these, 179 are in binary systems [42]. Therefore, when linking reference frames, it is necessary to convert the absolute positions of all pulsars to the same reference epoch. To facilitate comparisons of pulsar positions, Equation (1) is used to transform the pulsar positions to the same epoch:
where is the right ascension of the pulsar, is the declination of the pulsar, and are the proper motions of the pulsar in the two respective directions, is the parallax of the pulsar, and and are the parallax displacements of the pulsar in right ascension and declination, respectively. These can be expressed as follows:
where is the solar ecliptic longitude and is the obliquity of the ecliptic. It is noteworthy here that when fitting the position, proper motion, and parallax of a pulsar using VLBI phase-referencing observations, there can be correlations among the parameters with a coefficient of about 0.3 or higher. Such correlations can degrade the accuracy of parameter estimation [43]. Bayesian estimation methods typically take into account the correlations among parameters, and the errors given by this method more reasonably reflect the true error levels of the parameters. In practice, to avoid high correlations among parameters, the proper motion obtained from long-term timing data fitting can be used as a prior value for the VLBI proper motion, or another VLBI measurement of the pulsar can be conducted after a multi-year interval.
2.4. Method of the Frame-Tie Rotation
Due to differences in the implementation methods, models, and constant systems of kinematic and dynamical reference frames, there exist discrepancies between the ICRF and the solar system ephemeris reference frame. The ICRF is constructed based on the positions of distant extragalactic radio sources, which exhibit excellent non-rotational properties relative to the background space, making it closer to an inertial reference frame [40]. The primary errors in the ICRF arise from factors such as the structure of radio sources and the core shifts of radio sources across different wavelength bands. In contrast, the ephemeris reference frame is established through observations of celestial bodies within the solar system, including the Earth, Moon, major planets, and other small bodies, using various spacecraft. By conducting force analyses on these celestial bodies and numerically integrating their orbits, the ephemeris reference frame is dynamically realized, thereby aligning with the ICRF. The largest uncertainty in planetary positions comes from the shortcomings in the dynamical modelings [44]. The spatial orientation of the solar system ephemeris reference frame is determined through VLBI observations of spacecraft within the inner planets [8]. With the increase in the amount and improvement in the accuracy of spacecraft observation data, the connection between the spatial orientation of this reference frame and the ICRF has evolved, with the linkage accuracy improving from approximately 1 mas for DE405 relative to the ICRF to the current precision of 0.2 mas for DE440/441 relative to ICRF3. As mentioned before, the orientation of the ephemeris is established using VLBI data from spacecraft in the inner planets, and these same data are also used to construct the ephemeris. Therefore, there is a possibility that the orientation accuracy may be underestimated, necessitating verification through external, independent methods [13].
Methods for linking different reference frames (or frame-linking) can be broadly categorized into indirect and direct links. Indirect frame-linking refers to the derivation of the linking parameters between CRFs by comparing EOPs or Earth reference frames using different technologies such as VLBI, Global Positioning System (GPS), Satellite Laser Ranging (SLR), etc., [13]. Direct frame matching involves comparing the positions of the same object in different reference frames obtained by different technologies. These can be roughly divided into three types: occultation observations, satellite differential VLBI observations, and timing and VLBI observations of common MSPs [5,13,20,21]. The method we have chosen is direct linking. The specific linking method can be found in the article [20]. In particular, this method represents the positions of the pulsars as unit vectors with only right ascension and declination, and the parallax parameter is only used when the positions are reduced to a common reference epoch. Reference frame linking involves rotating the positions of common celestial bodies in different frames. The relationship between the two is given by the following equation,
Here, represents the Euler rotation angles around the X, Y, and Z axes, respectively. These are the linking parameters between the two reference frames that we need to solve for.
3. Results and Discussions
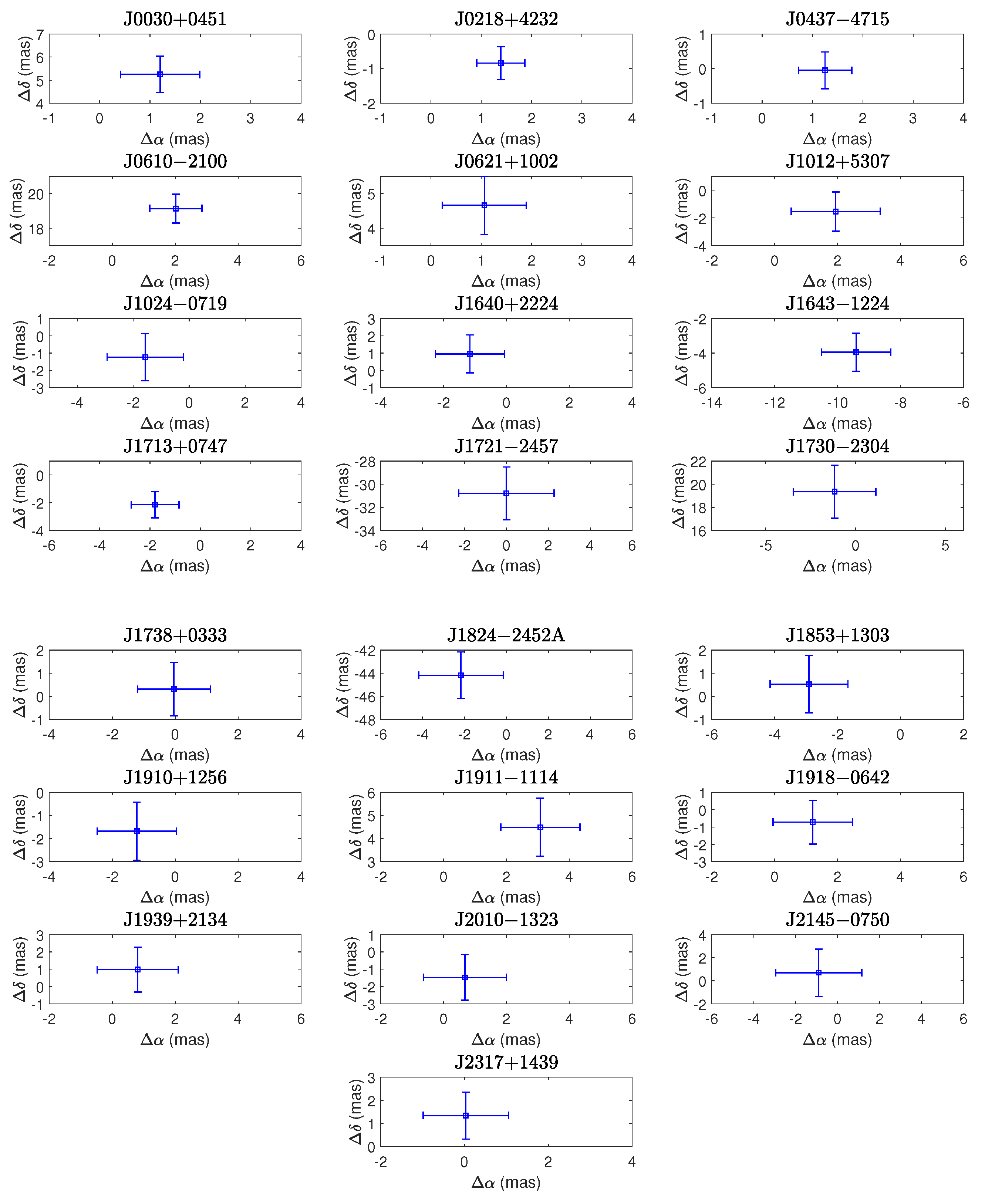
Using the published astrometric parameters of 23 MSPs estimated by VLBI as shown in Figure 1, we have aligned these parameters with those obtained by timing IPTA DR2 to the same epoch of MJD 55000.0. The positional differences in right ascension and declination are shown in the second and third columns of Table 2 and Figure 2. As can be seen from Table 2 and Figure 2, with the exception of PSR J1022+1001, four of these MSPs (PSR J0610-2100, J1721-2457, J1730-2304, J1824-2452A) also exhibit positional differences of up to 20 mas or more. Given such significant positional differences, we compared the proper motion parameters derived from the two techniques and found that for several MSPs the proper motion differences in the declination direction exceed 1 mas yr−1. Among them, for PSR J1730-2304, the mas yr−1 obtained from PPTA timing data, mas yr−1 from EPTA timing data, and mas yr−1 from comprehensive IPTA2 analysis differ widely. Therefore, these large proper motion differences arise from the solution of the timing data. Especially for pulsars near the ecliptic, the positional accuracy of pulsars obtained by timing methods is inferior to that of VLBI phase-referencing methods. After excluding the pulsar data with differences greater than 1 mas yr−1 in Table 2 and referencing DE436 to the ICRF3 reference frame, the result is as shown in Equation (4), with an accuracy of less than 0.4 mas, which basically supports the claim in [21].
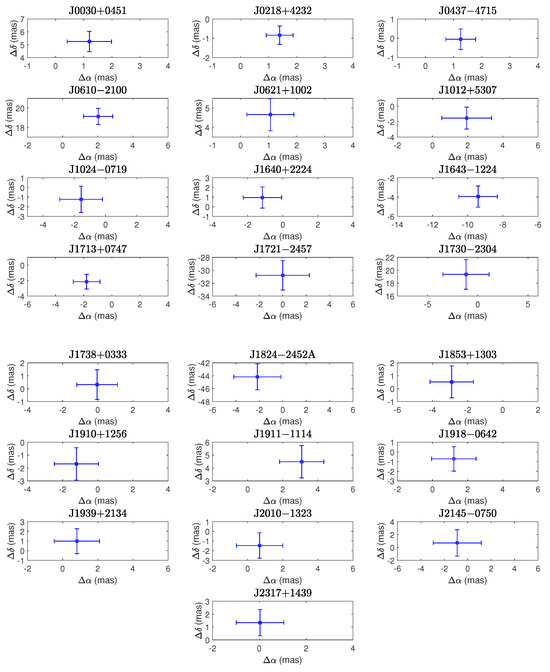
Figure 2.
Position differences of pulsars between DE436 and ICRF3 at the epoch of MJD 55000.0.
Figure 2 and Table 3 shows the positional difference of a pulsar at an identical epoch, derived using two techniques. VLBA data referred to [17]. IPTA data referred to [23]. The error bars depicted are formulated as , where and denote the positional errors of the pulsar at the reference epoch obtained via timing and VLBI. Both pulsar position errors by timing and VLBI adhere to the principles of error propagation theory. When converting the pulsar’s position to the identical reference epoch using Formula (1), the positional error, proper motion error, and parallax error at the reference epoch all conform the error propagation law to that epoch. After obtaining the positional differences and their weighted positional errors at identical epochs, a subsequent least squares solution is performed based on the observation Equation (3) to obtain the reference frame linking parameters and their accuracy. Consequently, the error associated with this positional difference encompasses the pulsar’s positional error at the reference epoch, the timing error, and the parallax error. It is worth noting that the errors mentioned here are based on the already calculated astrometric parameter errors of the pulsar. Actually, various errors affect the acquisition of the pulsar’s astrometric parameters. The positional accuracy of the pulsar obtained through timing is influenced by errors such as DM error, observational noise error, red noise error, and the pulsar’s intrinsic jitter [45]. On the other hand, the positional accuracy of the pulsar derived from VLBI is mainly affected by the positional error of the reference source, the structure of the reference source, the respective flux densities of the reference source and the pulsar, the angular distance between them, and the core shift of the reference source [29,46]. The impact of core shift includes two aspects: firstly, pulsar observations are typically conducted in the L-band, while reference source measurements are often made at the S/X-band or even higher frequencies, where the central position of the core may differ across frequencies; secondly, the radio source itself may exhibit motions such as jets. Core shift is one of the factors causing discrepancies in the proper motion of pulsars obtained through timing and VLBI. Simultaneous multi-band observations with VLBI can help eliminate errors introduced by core shift, making it possible to improve the positional accuracy of pulsars by nearly an order of magnitude which is a superior method for high-precision VLBI pulsar astrometry [46].
Table 3.
Astrometric Parameter Differences of Pulsars between DE436 and ICRF3 at the epoch of MJD 55000.0 in the equatorial coordinate system.
To further verify the accuracy of the reference frame connection results, we connected the DE200 and ICRF3 reference frames (as shown in Equation (3)) based on the VLBA measurement results of these MSPs and the timing results of IPTA DR2. We then compared and analyzed these results with the previously published connection results (as shown in Table 4). According to Table 4, our results are consistent with the published results. Due to the large positional differences between several pulsars, different combinations of pulsars may lead to variations in the results. We will discuss this in more detail in our subsequent work.
Table 4.
Comparison of Reference Frame Linking Results between DE200 and ICRF.
The timing data from MPTA DR1 used the JPL DE440 ephemeris [8]), and the ToAs referred to the Terrestrial Time (TT) Bureau International des Poids et Mesures (BIPM) 2020, and the TCB was used as the coordinate time standard for calculating orbits in the Solar System [25]. The astrometric parameters of all MSPs in our analysis are referred to [25]. Even though the total time span is only ∼3 years, the accuracy of the astrometric parameters for these MSPs is comparable to the accuracy measured by IPTA over more than a decade, and for some pulsars even better. Based on the MPTA DR1 timing data for common pulsars and the VLBI astrometric results, we have obtained the linking parameters (as shown in Equation (5)) between the DE440 ephemeris and the ICRF3 referred to the epoch of MJD 58000.0. The accuracy of this linkage result is better than 0.4 mas. This improvement is mainly due to the better timing and accuracy of the DE440 ephemeris compared to the DE436 ephemeris. In our further work, we will analyze the specific contribution of each pulsar in the reference frame connection.
4. Conclusions
Based on the common astrometric data of MSPs obtained both from timing and VLBI, we have established a connection between the dynamical and kinematic reference frames. Using the data from IPTA DR2 and VLBI, the precision of this connection is better than 0.4 mas. With measurements from MPTA and VLBI, despite the relatively small number of common pulsars, the precision of the connection is still better than 0.4 mas due to the improved timing precision of MeerKAT. The precision of pulsar astrometric parameters via timing and VLBA measurements are the direct factors determining the precision of the connection.
However, for MSPs close to the ecliptic plane, the positional accuracy provided by timing techniques is inadequate. Even measurements of the same pulsar from different antennas can vary considerably. The high-precision timing results from CPTA are expected to improve the positional accuracy of such MSPs. In addition, a comprehensive analysis of results from different networks has the potential to improve this precision.
The DR1 of 57 millisecond pulsars (MSPs) observed by the CPTA project, utilizing the FAST telescope, has resulted in a nearly one order-of-magnitude improvement in timing accuracy for most of the MSPs [30]. Meanwhile, the latest advancement in VLBI phase referencing is the multi-view technique, especially at low radio frequencies [48]. The multi-view technique holds the key to compensating for atmospheric spatial-structure errors by using observations of multiple calibrators and two-dimensional interpolation in the visibility domain to effectively calibrate the distinct direction-dependent ionospheric propagation errors. Multi-view calibration provides an order of magnitude improvement in astrometry with respect to conventional phase referencing, achieving μas astrometry errors in a single epoch of observations, effectively reaching the thermal noise limit in the first demonstration of using the multi-view technique [48].
Another new differential astrometry strategy of using multi-calibrators (or multi-view) across several widely separated frequencies is introduced to further improve the VLBI-based MSPs position precision by reducing the two dominant components of uncertainty: those related to propagation and those resulting from frequency-dependent core shifts in the calibrators [46]. This new multi-frequency strategy allows for the determination of the core shift in the calibrators. Applying the strategy, the core shifts for four calibrators around PSR J2222-0137 were determined and derived a VLBI-based pulsar position with an uncertainty of 0.17 mas and 0.32 mas in right ascension and declination, respectively, approaching the uncertainty level of the best-determined timing-based MSP positions [46]. The realization of the multi-view and multi-frequency observation strategy promises a factor-of-5 positional precision enhancement (over conventional VLBI astrometry) for all kinds of compact radio sources observed at ≤ 2 GHz, including most fast radio bursts [46]. Such a new strategy will also be applied in subsequent pulsar VLBI phase-referencing measurements. Furthermore, the Chinese VLBI Network (CVN), comprising the FAST telescope, the Shanghai Tianma 65-m telescope, the Nanshan 26-m telescope, and the Luonan 40-m radio telescope, has successfully detected PSR B0919+06 and B1133+16 [49,50]. The inclusion of FAST in the CVN will significantly improve the astrometric accuracy of pulsars. The high-precision timing results from FAST and new measurement techniques of VLBI are expected to further improve the current precision of the dynamical and kinematic connection to 0.3 mas, close to the precision of the reference frame connection established by differential VLBI and VLBA observations from deep space satellites for the current dynamical ephemerides.
Author Contributions
Conceptualization, methodology, and project administration: L.G., Z.Y., L.L., and G.W. data reduction and investigation: L.G. and Y.S.; writing original draft preparation: L.G.; writing review and editing: Z.Y. and L.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National SKA Program of China No. 2020SKA0120104, the Strategic Priority Research Program of the Chinese Academy of Sciences Grant No. XDA0350205 and National Natural Science Foundation of China (NSFC) No. 11873076.
Data Availability Statement
The data underlying this article will be shared on reasonable request to the corresponding author.
Acknowledgments
Many thanks to the IPTA, MPTA, VLBA and other pulsar observational networks as well as the relevant authors, for providing the observational data and related astrometric parameters of pulsars. We express our gratitude to the anonymous referees for their insightful comments which contributed to improving the manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
List of Abbreviations
| BIPM | Bureau International des Poids et Mesures |
| CPTA | Chinese Pulsar Timing Array |
| CRF | Celestial Reference Frame |
| CRS | Celestial Reference System |
| DE | Development Ephemeris |
| DM | Dispersion measure |
| DR | data release |
| EOP | Earth Orientation Parameter |
| EPTA | European Pulsar Timing Array |
| EVN | European VLBI Network |
| FAST | Five-hundred-meter Aperture Spherical radio Telescope |
| GPS | Global Positioning System |
| GWs | gravitational waves |
| ICRF | International Celestial Reference Frame |
| IPTA | International Pulsar Timing Array |
| JPL | Jet Propulsion Laboratory |
| LBA | Long Baseline Array |
| mas | milliarcsecond |
| MJD | Modified Julian Date |
| MPTA | MeerKAT Pulsar Timing Array |
| MSP | Millisecond pulsar |
| NANOGrav | North American Nanohertz Observatory for Gravitational Waves |
| PPTA | Parkes Pulsar Timing Array |
| PTA | Pulsar Timing Array |
| SLR | Satellite Laser Ranging |
| SSB | solar system barycenter |
| TCB | barycentric coordinate time |
| TDB | barycentric dynamic time |
| ToAs | Pulse times of arrival |
| TT | Terrestrial Time |
| VLBA | Very Long Baseline Array |
| VLBI | Very Long Baseline Interferometry |
References
- Malkin, Z. Towards a robust estimation of orientation parameters between ICRF and Gaia celestial reference frames. Mon. Not. R. Astron. Soc. 2021, 506, 5540–5547. [Google Scholar] [CrossRef]
- Ma, C.; Feissel, M. Definition and Realization of the International Celestial Reference System by VLBI Astrometry of Extragalactic Objects. Astron. J. 1998, 116, 516. [Google Scholar] [CrossRef]
- Fey, A.L.; Gordon, D.; Jacobs, C.S.; Ma, C.; Gaume, R.A.; Arias, E.F.; Bianco, G.; Boboltz, D.A.; Böckmann, S.; Bolotin, S.; et al. The Second Realization of the International Celestial Reference Frame by Very Long Baseline Interferometry. Astron. J. 2015, 150, 58. [Google Scholar] [CrossRef]
- Charlot, P.; Jacobs, C.S.; Gordon, D.; Lambert, S.; de Witt, A.; Boehm, J.; Fey, A.L.; Heinkelmann, R.; Skurikhina, E.; Titov, O.; et al. The third realization of the International Celestial Reference Frame by very long baseline interferometry. Astron. Astrophys. 2020, 644, A159. [Google Scholar] [CrossRef]
- Folkner, W.M.; Charlot, P.; Finger, M.H.; Williams, J.G.; Sovers, O.J.; Newhall, X.; Standish, E.M., Jr. Determination of the extragalactic-planetary frame tie from joint analysis of radio interferometric and lunar laser ranging measurements. Astron. Astrophys. 1994, 287, 279–289. [Google Scholar]
- Folkner, W.M. Relativistic aspects of the JPL Planetary Ephemeris. Proc. Int. Astron. Union 2010, 261, 155–158. [Google Scholar] [CrossRef]
- Folkner, W.M.; Williams, J.G.; Boggs, D.H.; Park, R.S.; Kuchynka, P. The Planetary and Lunar Ephemerides DE430 and DE431. Interplanet. Netw. Prog. Rep. 2014, 42, 196. [Google Scholar]
- Park, R.S.; Folkner, W.M.; Williams, J.G.; Boggs, D.H. The JPL Planetary and Lunar Ephemerides DE440 and DE441. Astron. J. 2021, 161, 105. [Google Scholar] [CrossRef]
- Folkner, W.M.; Williams, J.G.; Boggs, D.H. The Planetary and Lunar Ephemeris DE 421. Interplanet. Netw. Prog. Rep. 2009, 42, 178. [Google Scholar]
- Pitjeva, E.; Pavlov, D.; Aksim, D.; Kan, M. Planetary and lunar ephemeris EPM2021 and its significance for Solar system research. Proc. Int. Astron. Union 2022, 364, 220–225. [Google Scholar] [CrossRef]
- Fienga, A.; Bigot, L.; Mary, D.; Deram, P.; Di Ruscio, A.; Bernus, L.; Gastineau, M.; Laskar, J. Evolution of INPOP planetary ephemerides and Bepi-Colombo simulations. Proc. Int. Astron. Union 2022, 364, 31–51. [Google Scholar] [CrossRef]
- Tomsick, J.A.; Coughenour, B.M.; Hare, J.; Krivonos, R.; Bodaghee, A.; Chaty, S.; Clavel, M.; Fornasini, F.M.; Rodriguez, J.; Shaw, A.W. Using Chandra Localizations and Gaia Distances and Proper Motions to Classify Hard X-Ray Sources Discovered by INTEGRAL. Astron. J. 2021, 914, 48. [Google Scholar] [CrossRef]
- Li, L. Preliminary Study on the Construction of Pulsar-Based Space-Time Reference Frame. Ph.D. Dissertation, University of Chinese Academy of Sciences, Beijing, China, 2016. [Google Scholar]
- Yang, P.; Huang, Y.; Li, P.J.; Wang, H.; Fan, M.; Liu, S.Y.; Shan, Q.; Qin, S.H.; Liu, Q.H. Orbit determination of China’s first mars probe Tianwen-1 during interplanetary cruise. Adv. Space Res. 2022, 69, 1060–1071. [Google Scholar] [CrossRef]
- Lindegren, L. The Gaia reference frame for bright sources examined using VLBI observations of radio stars. Astron. Astrophys. 2020, 633, A1. [Google Scholar] [CrossRef]
- Chatterjee, S.; Brisken, W.F.; Vlemmings, W.H.T.; Goss, W.M.; Lazio, T.J.W.; Cordes, J.M.; Thorsett, S.E.; Fomalont, E.B.; Lyne, A.G.; Kramer, M. Precision Astrometry with the Very Long Baseline Array: Parallaxes and Proper Motions for 14 Pulsars. Astron. J. 2009, 698, 250–265. [Google Scholar] [CrossRef]
- Ding, H.; Deller, A.T.; Stappers, B.W.; Lazio, T.J.W.; Kaplan, D.; Chatterjee, S.; Brisken, W.; Cordes, J.; Freire, P.C.C.; Fonseca, E.; et al. The MSPSRπ catalogue: VLBA astrometry of 18 millisecond pulsars. Mon. Not. R. Astron. Soc. 2023, 519, 4982–5007. [Google Scholar] [CrossRef]
- Edwards, R.T.; Hobbs, G.B.; Manchester, R.N. TEMPO2, a new pulsar timing package–II. The timing model and precision estimates. Mon. Not. R. Astron. Soc. 2006, 372, 1549–1574. [Google Scholar] [CrossRef]
- Hobbs, G.B.; Edwards, R.T.; Manchester, R.N. TEMPO2, a new pulsar-timing package–I. An overview. Mon. Not. R. Astron. Soc. 2006, 369, 655–672. [Google Scholar] [CrossRef]
- Wang, J.B.; Coles, W.A.; Hobbs, G.; Shannon, R.M.; Manchester, R.N.; Kerr, M.; Yuan, J.P.; Wang, N.; Bailes, M.; Bhat, N.D.R.; et al. Comparison of pulsar positions from timing and very long baseline astrometry. Mon. Not. R. Astron. Soc. 2017, 469, 425–434. [Google Scholar] [CrossRef]
- Liu, N.; Zhu, Z.; Antoniadis, J.; Liu, J.C.; Zhang, H.; Jiang, N. Comparison of dynamical and kinematic reference frames via pulsar positions from timing, Gaia, and interferometric astrometry. Astron. Astrophys. 2023, 670, A173. [Google Scholar] [CrossRef]
- Verbiest, J.P.W.; Lentati, L.; Hobbs, G.; van Haasteren, R.; Demorest, P.B.; Janssen, G.H.; Wang, J.B.; Desvignes, G.; Caballero, R.N.; Keith, M.J.; et al. The International Pulsar Timing Array: First data release. Mon. Not. R. Astron. Soc. 2016, 458, 1267–1288. [Google Scholar] [CrossRef]
- Perera, B.B.P.; DeCesar, M.E.; Demorest, P.B.; Kerr, M.; Lentati, L.; Nice, D.J.; Osłowski, S.; Ransom, S.M.; Keith, M.J.; Arzoumanian, Z.; et al. The International Pulsar Timing Array: Second data release. Mon. Not. R. Astron. Soc. 2019, 490, 4666–4687. [Google Scholar] [CrossRef]
- Miles, M.T.; Shannon, R.M.; Bailes, M.; Reardon, D.J.; Keith, M.J.; Cameron, A.D.; Parthasarathy, A.; Shamohammadi, M.; Spiewak, R.; van Straten, W.; et al. The MeerKAT Pulsar Timing Array: First data release. Mon. Not. R. Astron. Soc. 2023, 519, 3976–3991. [Google Scholar] [CrossRef]
- Shamohammadi, M.; Bailes, M.; Flynn, C.; Reardon, D.J.; Shannon, R.M.; Buchner, S.; Cameron, A.D.; Camilo, F.; Corongiu, A.; Geyer, M.; et al. MeerKAT Pulsar Timing Array parallaxes and proper motions. Mon. Not. R. Astron. Soc. 2024, 530, 287–306. [Google Scholar] [CrossRef]
- Deller, A.T.; Verbiest, J.P.W.; Tingay, S.J.; Balies, M. Extremely High Precision VLBI Astrometry of PSR J0437-4715 and Implications for Theories of Gravity. Astron. J. 2008, 685, L67–L70. [Google Scholar] [CrossRef]
- Deller, A.T.; Archibald, A.M.; Brisken, W.F.; Chatterjee, S.; Janssen, G.H.; Kaspi, V.M.; Lorimer, D.; Lyne, A.G.; McLaughlin, M.A.; Ransom, S.; et al. A Parallax Distance and Mass Estimate for the Transitional Millisecond Pulsar System J1023+0038. Astrophys. J. Lett. 2012, 756, L25. [Google Scholar] [CrossRef]
- Deller, A.T.; Vigeland, S.J.; Kaplan, D.L.; Goss, W.M.; Brisken, W.F.; Chatterjee, S.; Cordes, J.M.; Janssen, G.H.; Lazio, T.J.W.; Petrov, L.; et al. Microarcsecond VLBI Pulsar Astrometry with PSRπ. Two Binary Millisecond Pulsars with White Dwarf Companions. Astron. J. 2016, 828, 8. [Google Scholar] [CrossRef]
- Deller, A.T.; Goss, W.M.; Brisken, W.F.; Chatterjee, S.; Cordes, J.M.; Janssen, G.H.; Kovalev, Y.Y.; Lazio, T.J.W.; Petrov, L.; Stappers, B.W.; et al. Microarcsecond VLBI Pulsar Astrometry with PSRπ. Parallax Distances for 57 Pulsars. Astron. J. 2019, 875, 100. [Google Scholar] [CrossRef]
- Xu, H.; Chen, S.; Guo, Y.; Jiang, J.; Wang, B.; Xu, J.; Xue, Z.; Nicolas, C.R.; Yuan, J.; Xu, Y.; et al. Searching for the Nano-Hertz Stochastic Gravitational Wave Background with the Chinese Pulsar Timing Array Data Release I. Res. Astron. Astrophys. 2023, 23, 075024. [Google Scholar] [CrossRef]
- Bailes, M.; Barr, E.; Bhat, N.D.R.; Brink, J.; Buchner, S.; Burgay, M.; Camilo, F.; Champion, D.; Hessels, J.; Jameson, A.; et al. MeerTime—The MeerKAT Key Science Program on Pulsar Timing. In Proceedings of the MeerKAT Science: On the Pathway to the, SKA, Stellenbosch, South Africa, 25–27 May 2016; Volume 277, p. 11. [Google Scholar] [CrossRef]
- Dewdney, P.E.; Hall, P.J.; Schilizzi, R.T.; Lazio, T.J.W. The Square Kilometre Array. Proc. IEEE 2009, 97, 1482–1496. [Google Scholar] [CrossRef]
- Yan, Z.; Shen, Z.Q.; Yuan, J.P.; Wang, N.; Rottmann, H.; Alef, W. VLBI astrometry of two millisecond pulsars. Proc. Int. Astron. Union 2013, 291, 562–564. [Google Scholar] [CrossRef]
- Lorimer, D.R. Binary and Millisecond Pulsars. Living Rev. Relativ. 2008, 11, 8. [Google Scholar] [CrossRef] [PubMed]
- Champion, D.J.; Hobbs, G.B.; Manchester, R.N.; Edwards, R.T.; Backer, D.C.; Bailes, M.; Bhat, N.D.; Burke-Spolaor, S.; Coles, W.; Demorest, P.B.; et al. Measuring the Mass of Solar System Planets Using Pulsar Timing. Astrophys. J. Lett. 2010, 720, L201–L205. [Google Scholar] [CrossRef]
- Dai, J.P.; Han, W.; Wang, N. The Influence of Different Solar System Planetary Ephemerides on Pulsar Timing. Res. Astron. Astrophys. 2024, 24, 085008. [Google Scholar] [CrossRef]
- Chen, S.; Caballero, R.N.; Guo, Y.J.; Chalumeau, A.; Liu, K.; Shaifullah, G.; Lee, K.J.; Babak, S.; Desvignes, G.; Parthasarathy, A.; et al. Common-red-signal analysis with 24-yr high-precision timing of the European Pulsar Timing Array: Inferences in the stochastic gravitational-wave background search. Mon. Not. R. Astron. Soc. 2021, 508, 4970–4993. [Google Scholar] [CrossRef]
- Liu, N.; Zhu, Z.; Antoniadis, J.; Liu, J.C.; Zhang, H. Systematics of planetary ephemeris reference frames inferred from pulsar timing astrometry. Astron. Astrophys. 2023, 674, A187. [Google Scholar] [CrossRef]
- Du, Y.J.; Yang, J.; Campbell, R.M.; Janssen, G.; Stappers, B.; Chen, D. Very Long Baseline Interferometry Measured Proper Motion and Parallax of the γ-Ray Millisecond Pulsar PSR J0218+4232. Astrophys. J. Lett. 2014, 782, L38. [Google Scholar] [CrossRef]
- Ma, C.; Arias, E.F.; Bianco, G.; Boboltz, D.A.; Bolotin, S.L.; Charlot, P.; Engelhardt, G.; Fey, A.L.; Gaume, R.A.; Gontier, A.M.; et al. The Second Realization of the International Celestial Reference Frame by Very Long Baseline Interferometry. IERS Tech. Notes 2009, 35, 47. [Google Scholar]
- Kaplan, D.L.; Kupfer, T.; Nice, D.J.; Irrgang, A.; Heber, U.; Arzoumanian, Z.; Beklen, E.; Crowter, K.; DeCesar, M.E.; Demorest, P.B.; et al. PSR J1024-0719: A Millisecond Pulsar in an Unusual Long-period Orbit. Astron. J. 2016, 826, 86. [Google Scholar] [CrossRef]
- Zhou, D.K.; Wang, P.; Li, D.; Fang, J.H.; Miao, C.C.; Freire, P.C.C.; Zhang, L.; Zhang, D.D.; Chen, H.X.; Feng, Y.; et al. A discovery of two slow pulsars with FAST: “Ronin” from the globular cluster M15. Sci. China Phys. Mech. Astron. 2024, 67, 269512. [Google Scholar] [CrossRef]
- Reid, M.J.; Brunthaler, A.; Menten, K.M.; Sanna, A.; Xu, Y.; Li, J.J.; Wu, Y.; Hu, B.; Zheng, X.W.; Zhang, B.; et al. Techniques for Accurate Parallax Measurements for 6.7 GHz Methanol Masers. Astron. J. 2017, 154, 63. [Google Scholar] [CrossRef]
- Standish, E.M.; Fienga, A. Accuracy limit of modern ephemerides imposed by the uncertainties in asteroid masses. Astron. Astrophys. 2002, 384, 322–328. [Google Scholar] [CrossRef]
- Hobbs, G.; Guo, L.; Caballero, R.N.; Coles, W.; Lee, K.J.; Manchester, R.N.; Reardon, D.J.; Matsakis, D.; Tong, M.L.; Arzoumanian, Z.; et al. A pulsar-based time-scale from the International Pulsar Timing Array. Mon. Not. R. Astron. Soc. 2020, 491, 5951–5965. [Google Scholar] [CrossRef]
- Ding, H.; Deller, A.T.; Freire, P.C.; Petrov, L. A millisecond pulsar position determined to 0.2 mas precision with VLBI. Astron. Astrophys. 2024, 691, A47. [Google Scholar] [CrossRef]
- Rodin, A.; Sekido, M. Pulsar VLBI Observations. In Proceedings of the 6th EVN Sysposium, Bonn, Germany, 25–28 June 2002; p. 247. [Google Scholar]
- Rioja, M.J.; Dodson, R.; Orosz, G.; Imai, H.; Frey, S. MultiView High Precision VLBI Astrometry at Low Frequencies. Astron. J. 2017, 153, 105. [Google Scholar] [CrossRef]
- Yan, Z.; Shen, Z.Q.; Wu, Y.J.; Zhao, R.B.; Liu, J.; Huang, Z.P.; Wang, R.; Wang, X.W.; Liu, Q.H.; Li, B.; et al. Shanghai Tianma Radio Telescope and Its Role in Pulsar Astronomy. Universe 2024, 10, 195. [Google Scholar] [CrossRef]
- Yan, Z.; Shen, Z.Q.; Jiang, P.; Zhang, B.; Zhang, H.Y.; Cui, L.; Luo, J.T.; Chen, R.R.; Jiang, W.; Zhang, H.; et al. Pathfinding Pulsar Observations with the CVN Incorporating the FAST. Chin. Phys. Lett. 2024, 41, 117501. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).