Statistical Estimates of the Pulsar Glitch Activity



Abstract
:1. Introduction
2. Extracting the Activity Parameter from Observations
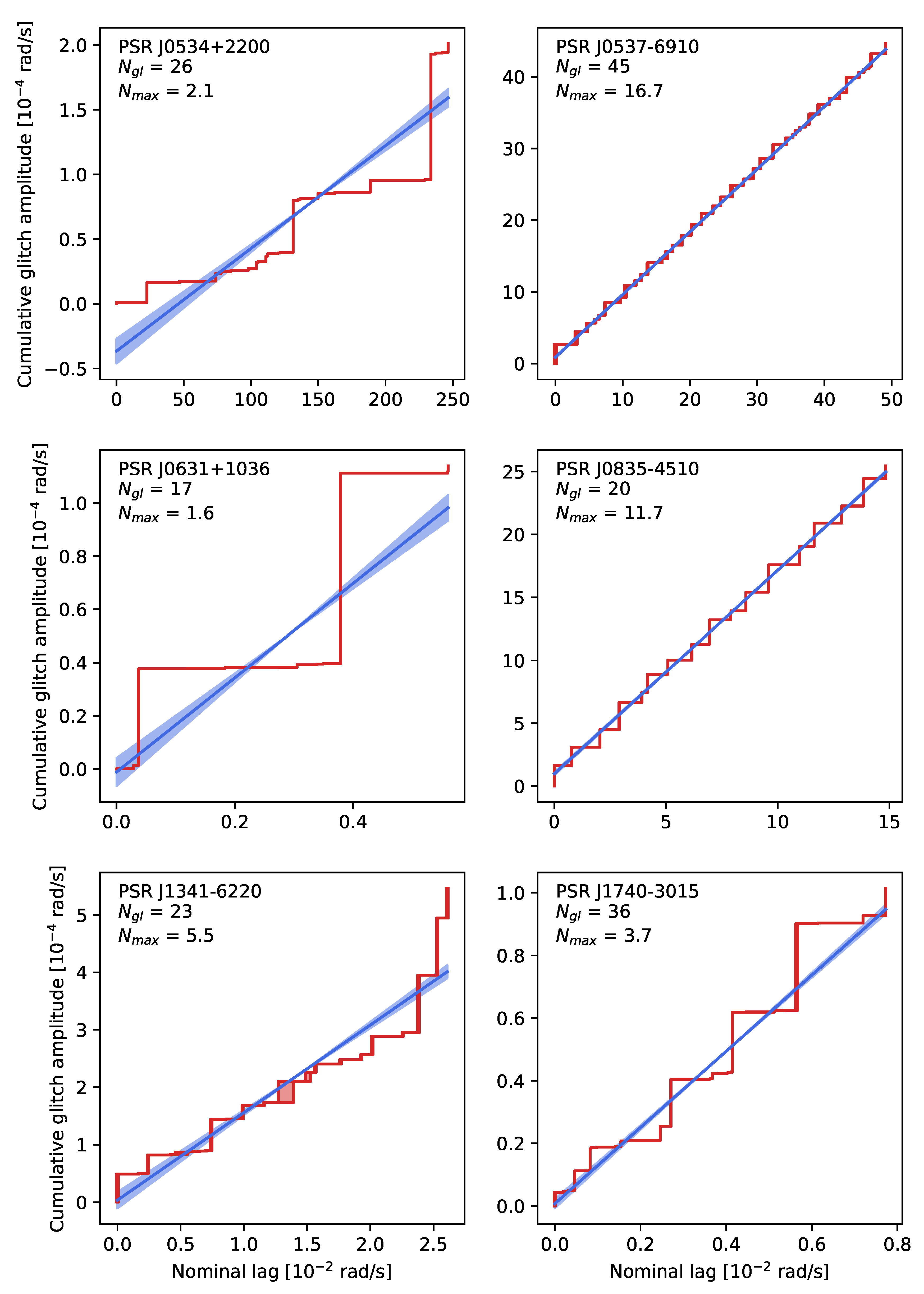
2.1. Ordinary Linear Regression on the Cumulative Glitch History
2.2. Linear Regression on Heteroscedastic Data
2.3. Extracting the Activity from Glitch Size and Waiting Time Distributions
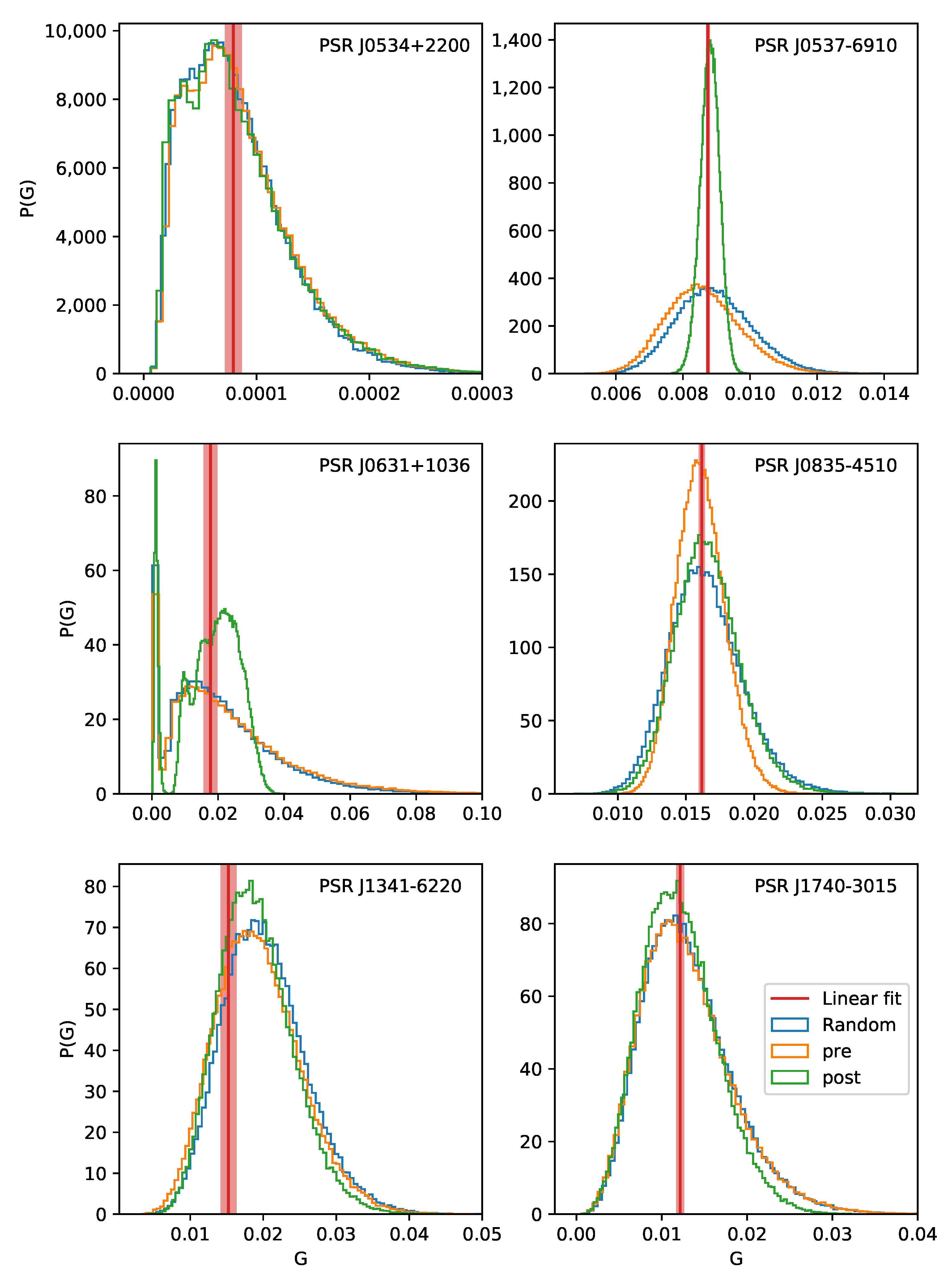
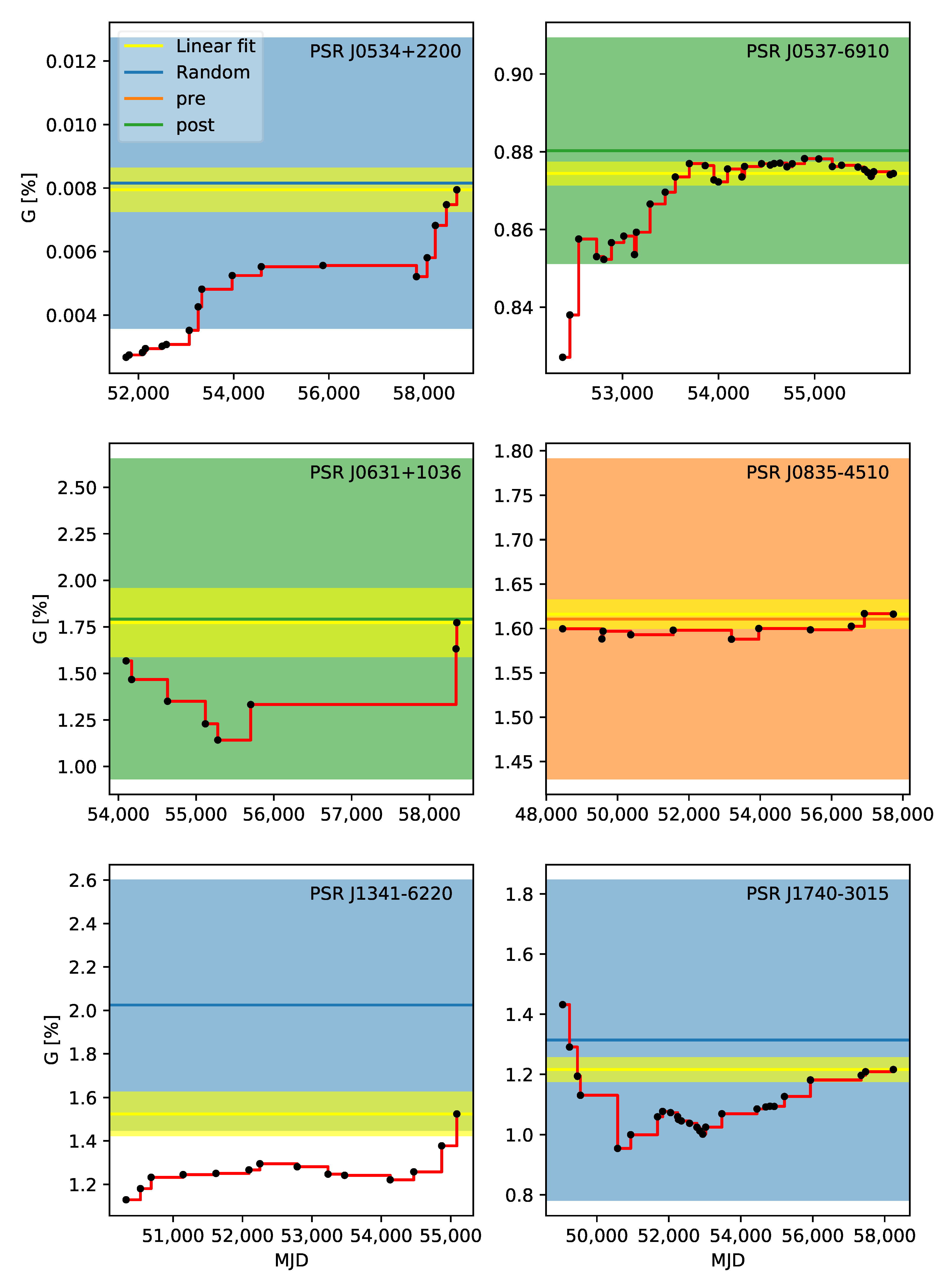
2.4. Estimating the Uncertainty of Activity: The Bootstrap Method
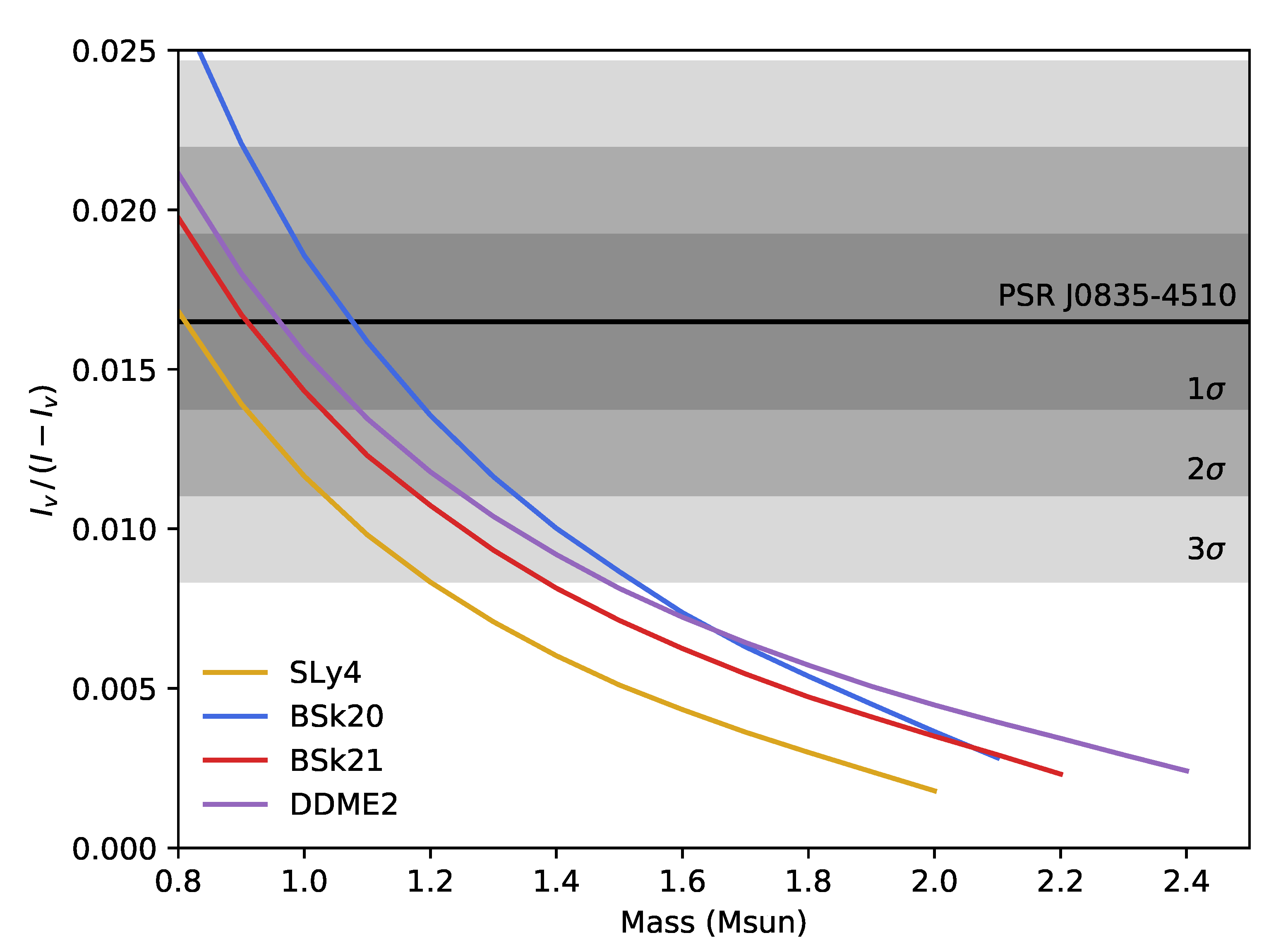
3. Moment of Inertia Constraint
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Activity Calculation with the Delta Method
Appendix B. Derivation of the Moment of Inertia Constraint
References
- Haskell, B.; Melatos, A. Models of pulsar glitches. Int. J. Mod. Phys. D 2015. [Google Scholar] [CrossRef]
- Baym, G.; Pethick, C.; Pines, D.; Ruderman, M. Spin Up in Neutron Stars: The Future of the Vela Pulsar. Nature 1969, 224, 872–874. [Google Scholar] [CrossRef]
- Anderson, P.W.; Itoh, N. Pulsar glitches and restlessness as a hard superfluidity phenomenon. Nature 1975, 256, 25–27. [Google Scholar] [CrossRef]
- Andersson, N.; Sidery, T.; Comer, G.L. Mutual friction in superfluid neutron stars. Mon. Not. R. Astron. Soc. 2006, 368, 162–170. [Google Scholar] [CrossRef]
- Antonelli, M.; Haskell, B. Superfluid vortex-mediated mutual friction in non-homogeneous neutron star interiors. Mon. Not. R. Astron. Soc. 2020. [Google Scholar] [CrossRef]
- McKenna, J.; Lyne, A.G. PSR1737-30 and period discontinuities in young pulsars. Nature 1990, 343, 349–350. [Google Scholar] [CrossRef]
- Lyne, A.G.; Shemar, S.L.; Graham Smith, F. Statistical studies of pulsar glitches. Mon. Not. R. Astron. Soc. 2000, 315, 534–542. [Google Scholar] [CrossRef] [Green Version]
- Espinoza, C.M.; Lyne, A.G.; Stappers, B.W.; Kramer, M. A study of 315 glitches in the rotation of 102 pulsars. Mon. Not. R. Astron. Soc. 2011, 414, 1679–1704. [Google Scholar] [CrossRef] [Green Version]
- Melatos, A.; Peralta, C.; Wyithe, J.S.B. Avalanche Dynamics of Radio Pulsar Glitches. Astrophys. J. 2008, 672, 1103–1118. [Google Scholar] [CrossRef] [Green Version]
- Howitt, G.; Melatos, A.; Delaigle, A. Nonparametric Estimation of the Size and Waiting Time Distributions of Pulsar Glitches. Astrophys. J. 2018, 867, 60. [Google Scholar] [CrossRef] [Green Version]
- Fuentes, J.R.; Espinoza, C.M.; Reisenegger, A. Glitch time series and size distributions in eight prolific pulsars. Astron. Astrophys. 2019, 630, A115. [Google Scholar] [CrossRef]
- Antonopoulou, D.; Espinoza, C.M.; Kuiper, L.; Andersson, N. Pulsar spin-down: The glitch-dominated rotation of PSR J0537-6910. Mon. Not. R. Astron. Soc. 2018, 473, 1644–1655. [Google Scholar] [CrossRef] [Green Version]
- Espinoza, C.M.; Antonopoulou, D.; Dodson, R.; Stepanova, M.; Scherer, A. Small glitches and other rotational irregularities of the Vela pulsar. arXiv 2020, arXiv:2007.02921. [Google Scholar]
- Antonelli, M.; Montoli, A.; Pizzochero, P.M. Effects of general relativity on glitch amplitudes and pulsar mass upper bounds. Mon. Not. R. Astron. Soc. 2018, 475, 5403–5416. [Google Scholar] [CrossRef] [Green Version]
- Ashton, G.; Lasky, P.D.; Graber, V.; Palfreyman, J. Rotational evolution of the Vela pulsar during the 2016 glitch. Nat. Astron. 2019, 3, 1143–1148. [Google Scholar] [CrossRef] [Green Version]
- Pizzochero, P.M.; Montoli, A.; Antonelli, M. Core and crust contributions in overshooting glitches: The Vela pulsar 2016 glitch. Astron. Astrophys. 2020, 636, A101. [Google Scholar] [CrossRef]
- Sourie, A.; Chamel, N. Vortex pinning in the superfluid core of neutron stars and the rise of pulsar glitches. Mon. Not. R. Astron. Soc. 2020, 493, L98–L102. [Google Scholar] [CrossRef]
- Montoli, A.; Antonelli, M.; Magistrelli, F.; Pizzochero, P.M. Bayesian estimate of the superfluid moments of inertia from the 2016 glitch in the Vela pulsar. Astron. Astrophys. 2020, 642, A223. [Google Scholar] [CrossRef]
- Datta, B.; Alpar, M.A. Implications of the crustal moment of inertia for neutron-star equations of state. Astron. Astrophys. 1993, 275, 210–212. [Google Scholar]
- Link, B.; Epstein, R.I.; Lattimer, J.M. Pulsar Constraints on Neutron Star Structure and Equation of State. Phys. Rev. Lett. 1999, 83, 3362–3365. [Google Scholar] [CrossRef] [Green Version]
- Andersson, N.; Glampedakis, K.; Ho, W.C.G.; Espinoza, C.M. Pulsar Glitches: The Crust is not Enough. Phys. Rev. Lett. 2012, 109, 241103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chamel, N. Crustal Entrainment and Pulsar Glitches. Phys. Rev. Lett. 2013, 110, 011101. [Google Scholar] [CrossRef] [PubMed]
- Delsate, T.; Chamel, N.; Gürlebeck, N.; Fantina, A.F.; Pearson, J.M.; Ducoin, C. Giant pulsar glitches and the inertia of neutron star crusts. Phys. Rev. D 2016, 94, 023008. [Google Scholar] [CrossRef] [Green Version]
- Ho, W.C.G.; Espinoza, C.M.; Antonopoulou, D.; Andersson, N. Pinning down the superfluid and measuring masses using pulsar glitches. Sci. Adv. 2015, 1, e1500578. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pizzochero, P.M.; Antonelli, M.; Haskell, B.; Seveso, S. Constraints on pulsar masses from the maximum observed glitch. Nat. Astron. 2017, 1, 0134. [Google Scholar] [CrossRef] [Green Version]
- Montoli, A.; Antonelli, M.; Pizzochero, P.M. The role of mass, equation of state, and superfluid reservoir in large pulsar glitches. Mon. Not. R. Astron. Soc. 2020, 492, 4837–4846. [Google Scholar] [CrossRef]
- Packard, R.E. Pulsar Speedups Related to Metastability of the Superfluid Neutron-Star Core. Phys. Rev. Lett. 1972, 28, 1080–1082. [Google Scholar] [CrossRef]
- Alpar, M.A. Pinning and Threading of Quantized Vortices in the Pulsar Crust Superfluid. Astrophys. J. 1977, 213, 527–530. [Google Scholar] [CrossRef]
- Donati, P.; Pizzochero, P.M. Fully consistent semi-classical treatment of vortex-nucleus interaction in rotating neutron stars. Nucl. Phys. A 2004, 742, 363–379. [Google Scholar] [CrossRef]
- Seveso, S.; Pizzochero, P.M.; Grill, F.; Haskell, B. Mesoscopic pinning forces in neutron star crusts. Mon. Not. R. Astron. Soc. 2016, 455, 3952–3967. [Google Scholar] [CrossRef] [Green Version]
- Andreev, A.F.; Bashkin, E.P. Three-velocity hydrodynamics of superfluid solutions. Sov. J. Exp. Theor. Phys. 1976, 42, 164. [Google Scholar]
- Chamel, N. Neutron conduction in the inner crust of a neutron star in the framework of the band theory of solids. Phys. Rev. C 2012, 85, 035801. [Google Scholar] [CrossRef]
- Sauls, J.A.; Chamel, N.; Alpar, M.A. Superfluidity in Disordered Neutron Stars Crusts. arXiv 2020, arXiv:2001.09959. [Google Scholar]
- Gügercinoğlu, E.; Alpar, M.A. Vortex Creep Against Toroidal Flux Lines, Crustal Entrainment, and Pulsar Glitches. Astrophys. J. Lett. 2014, 788, L11. [Google Scholar] [CrossRef] [Green Version]
- Muslimov, A.G.; Tsygan, A.I. Vortex lines in neutron star superfluids and decay of pulsar magnetic fields. Astrophys. Space Sci. 1985, 115, 43–49. [Google Scholar] [CrossRef]
- Srinivasan, G.; Bhattacharya, D.; Muslimov, A.G.; Tsygan, A.J. A novel mechanism for the decay of neutron star magnetic fields. Curr. Sci. 1990, 59, 31–38. [Google Scholar]
- Drummond, L.V.; Melatos, A. Stability of interlinked neutron vortex and proton flux tube arrays in a neutron star: Equilibrium configurations. Mon. Not. R. Astron. Soc. 2017, 472, 4851–4869. [Google Scholar] [CrossRef]
- Alpar, M.A. Flux-Vortex Pinning and Neutron Star Evolution. J. Astrophys. Astron. 2017, 38, 44. [Google Scholar] [CrossRef] [Green Version]
- Wood, T.S.; Graber, V.; Newton, W.G. Superconducting phases in a two-component microscale model of neutron star cores. arXiv 2020, arXiv:2011.02873. [Google Scholar]
- Leinson, L.B. Vortex lattice in rotating neutron spin-triplet superfluid. Mon. Not. R. Astron. Soc. 2020, 498, 304–309. [Google Scholar] [CrossRef]
- Corral, Á. Dependence of earthquake recurrence times and independence of magnitudes on seismicity history. Tectonophysics 2006, 424, 177–193. [Google Scholar] [CrossRef]
- Wong, T.; Backer, D.C.; Lyne, A.G. Observations of a Series of Six Recent Glitches in the Crab Pulsar. Astrophys. J. 2001, 548, 447–459. [Google Scholar] [CrossRef] [Green Version]
- Manchester, R.N.; Hobbs, G.B.; Teoh, A.; Hobbs, M. The Australia Telescope National Facility Pulsar Catalogue. Astron. J. 2005, 129, 1993–2006. [Google Scholar] [CrossRef]
- Fulgenzi, W.; Melatos, A.; Hughes, B.D. Radio pulsar glitches as a state-dependent Poisson process. Mon. Not. R. Astron. Soc. 2017, 470, 4307–4329. [Google Scholar] [CrossRef]
- Mandel, J. Fitting a Straight Line to Certain Types of Cumulative Data. J. Am. Stat. Assoc. 1957, 52, 552–566. [Google Scholar] [CrossRef]
- Melatos, A.; Howitt, G.; Fulgenzi, W. Size-waiting-time Correlations in Pulsar Glitches. Astrophys. J. 2018, 863, 196. [Google Scholar] [CrossRef] [Green Version]
- Efron, B. Bootstrap Methods: Another Look at the Jackknife. Ann. Statist. 1979, 7, 1–26. [Google Scholar] [CrossRef]
- Middleditch, J.; Marshall, F.E.; Wang, Q.D.; Gotthelf, E.V.; Zhang, W. Predicting the Starquakes in PSR J0537-6910. Astrophys. J. 2006, 652, 1531–1546. [Google Scholar] [CrossRef] [Green Version]
- Shaw, B.; Lyne, A.G.; Stappers, B.W.; Weltevrede, P.; Bassa, C.G.; Lien, A.Y.; Mickaliger, M.B.; Breton, R.P.; Jordan, C.A.; Keith, M.J.; et al. The largest glitch observed in the Crab pulsar. Mon. Not. R. Astron. Soc. 2018, 478, 3832–3840. [Google Scholar] [CrossRef] [Green Version]
- Hartle, J.B. Slowly Rotating Relativistic Stars. I. Equations of Structure. Astrophys. J. 1967, 150, 1005. [Google Scholar] [CrossRef]
- Andersson, N.; Comer, G.L. Slowly rotating general relativistic superfluid neutron stars. Class. Quantum Gravity 2001, 18, 969–1002. [Google Scholar] [CrossRef]
- Sourie, A.; Chamel, N.; Novak, J.; Oertel, M. Global numerical simulations of the rise of vortex-mediated pulsar glitches in full general relativity. Mon. Not. R. Astron. Soc. 2017, 464, 4641–4657. [Google Scholar] [CrossRef]
- Carreau, T.; Gulminelli, F.; Margueron, J. General predictions for the neutron star crustal moment of inertia. Phys. Rev. C 2019, 100, 055803. [Google Scholar] [CrossRef] [Green Version]
- Douchin, F.; Haensel, P. A unified equation of state of dense matter and neutron star structure. Astron. Astrophys. 2001, 380, 151–167. [Google Scholar] [CrossRef] [Green Version]
- Goriely, S.; Chamel, N.; Pearson, J.M. Further explorations of Skyrme-Hartree-Fock-Bogoliubov mass formulas. XII. Stiffness and stability of neutron-star matter. Phys. Rev. C 2010, 82, 035804. [Google Scholar] [CrossRef] [Green Version]
- Lalazissis, G.A.; Nikšić, T.; Vretenar, D.; Ring, P. New relativistic mean-field interaction with density-dependent meson-nucleon couplings. Phys. Rev. C 2005, 71, 024312. [Google Scholar] [CrossRef] [Green Version]
- Fortin, M.; Providência, C.; Raduta, A.R.; Gulminelli, F.; Zdunik, J.L.; Haensel, P.; Bejger, M. Neutron star radii and crusts: Uncertainties and unified equations of state. Phys. Rev. C 2016, 94, 035804. [Google Scholar] [CrossRef] [Green Version]
- Suwa, Y.; Yoshida, T.; Shibata, M.; Umeda, H.; Takahashi, K. On the minimum mass of neutron stars. Mon. Not. R. Astron. Soc. 2018, 481, 3305–3312. [Google Scholar] [CrossRef] [Green Version]
- Martinez, J.G.; Stovall, K.; Freire, P.C.C.; Deneva, J.S.; Jenet, F.A.; McLaughlin, M.A.; Bagchi, M.; Bates, S.D.; Ridolfi, A. Pulsar J0453+1559: A Double Neutron Star System with a Large Mass Asymmetry. Astrophys. J. 2015, 812, 143. [Google Scholar] [CrossRef] [Green Version]
- Piekarewicz, J.; Fattoyev, F.J.; Horowitz, C.J. Pulsar glitches: The crust may be enough. Phys. Rev. C 2014, 90, 015803. [Google Scholar] [CrossRef]
- Martin, N.; Urban, M. Superfluid hydrodynamics in the inner crust of neutron stars. Phys. Rev. C 2016, 94, 065801. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, G.; Pethick, C.J. Superfluid Density of Neutrons in the Inner Crust of Neutron Stars: New Life for Pulsar Glitch Models. Phys. Rev. Lett. 2017, 119, 062701. [Google Scholar] [CrossRef] [Green Version]
- Graber, V.; Cumming, A.; Andersson, N. Glitch Rises as a Test for Rapid Superfluid Coupling in Neutron Stars. Astrophys. J. 2018, 865, 23. [Google Scholar] [CrossRef]
- Haskell, B.; Khomenko, V.; Antonelli, M.; Antonopoulou, D. Crust or core? Insights from the slow rise of large glitches in the Crab pulsar. Mon. Not. R. Astron. Soc. 2018, 481, L146–L150. [Google Scholar] [CrossRef]
- Carlin, J.B.; Melatos, A. Autocorrelations in pulsar glitch waiting times and sizes. Mon. Not. R. Astron. Soc. 2019, 488, 4890–4896. [Google Scholar] [CrossRef]
- Gavassino, L.; Antonelli, M.; Pizzochero, P.M.; Haskell, B. A universal formula for the relativistic correction to the mutual friction coupling time-scale in neutron stars. Mon. Not. R. Astron. Soc. 2020, 494, 3562–3580. [Google Scholar] [CrossRef]
- Chamel, N. Entrainment in Superfluid Neutron-Star Crusts: Hydrodynamic Description and Microscopic Origin. J. Low Temp. Phys. 2017, 189, 328–360. [Google Scholar] [CrossRef]
| 1. | |
| 2. | |
| 3. | We define as the spherical coordinates, with and being the polar and azimuthal angles, respectively; the cylindrical coordinates are defined as , with z being the axis. |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulsar | |||||
|---|---|---|---|---|---|
| 0534+2200 | 0.0079 ± 0.0007 | 0.008 ± 0.006 | 0.008 ± 0.005 | 0.008 ± 0.005 | 0.008 ± 0.005 |
| 0537-6910 | 0.874 ± 0.003 | 0.85 ± 0.15 | 0.89 ± 0.11 | 0.86 ± 0.11 | 0.88 ± 0.03 |
| 0631+1036 | 1.77 ± 0.18 | 2.03 ± 1.95 | 2.11 ± 1.67 | 2.29 ± 1.80 | 1.80 ± 0.85 |
| 0835-4510 | 1.62 ± 0.02 | 1.6 ± 0.2 | 1.65 ± 0.3 | 1.6 ± 0.2 | 1.6 ± 0.2 |
| 1341-6220 | 1.52 ± 0.10 | 1.9 ± 0.6 | 2.0 ± 0.6 | 1.9 ± 0.6 | 1.9 ± 0.5 |
| 1740-3015 | 1.22 ± 0.04 | 1.3 ± 0.7 | 1.3 ± 0.5 | 1.3 ± 0.5 | 1.2 ± 0.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoli, A.; Antonelli, M.; Haskell, B.; Pizzochero, P. Statistical Estimates of the Pulsar Glitch Activity. Universe 2021, 7, 8. https://doi.org/10.3390/universe7010008
Montoli A, Antonelli M, Haskell B, Pizzochero P. Statistical Estimates of the Pulsar Glitch Activity. Universe. 2021; 7(1):8. https://doi.org/10.3390/universe7010008
Chicago/Turabian StyleMontoli, Alessandro, Marco Antonelli, Brynmor Haskell, and Pierre Pizzochero. 2021. "Statistical Estimates of the Pulsar Glitch Activity" Universe 7, no. 1: 8. https://doi.org/10.3390/universe7010008
APA StyleMontoli, A., Antonelli, M., Haskell, B., & Pizzochero, P. (2021). Statistical Estimates of the Pulsar Glitch Activity. Universe, 7(1), 8. https://doi.org/10.3390/universe7010008