
Probing Gravitational Waves from Pulsars in Brans–Dicke Theory


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- There should exist vibrational modes which are freely excitable in the absence of any source. They are also called degrees of freedom (DOF). So, a theory is classified by the number of vibrational modes and the spin of these modes.
- The next characteristic is the propagation of these modes in an empty space. If the mode is massless, we have Coulomb potential, which results in the long-range force. On the other hand, a massive mode generates Yukawa potential, which is responsible for short-range force.
- Finally, one needs to consider the interaction of these modes with themselves as well as other fields.
2. Experimental Tests of Brans–Dicke Theory
2.1. Post-Newtonian and Parameterized Post-Newtonian Formalism
- : It measures spatial curvature produced by unit rest mass.
- : It measures non-linearity in gravity.
- : It is non-zero in any theory of gravity that predicts preferred-location effects, such as galaxy-induced anisotropy in the local gravitational constant.
- : They measure whether or not the theory predicts post-Newtonian preferred-frame effects.
- : They determine whether the linear momentum and angular momentum are conserved or not.
2.2. Experimental Tests of BD Theory in the Weak-Field Limit
- The deflection of light: The development of very-long-baseline radio interferometry (VLBI) helped scientists to measure the deflection of light with better accuracy. Early measurements took advantage of a series of the heavenly coincidences where groups of strong quasistellar radio sources pass very close to the Sun. A 1995 VLBI measurement using 3C273 and 3C279 yielded [8]. A 2009 measurement using the very long baseline array (VLBA) targeting the same two quasars, plus two other nearby radio sources yielded [9]. In recent years, transcontinental and intercontinental VLBI observations of quasars and radio galaxies have been made primarily to monitor the Earth’s rotation. A 2004 analysis of almost 2 million VLBI observations of 541 radio sources, made by 87 VLBI sites, yielded [10]. Analyses that incorporated data through 2010 yielded [5,11,12].
- The time delay of light: A radar signal sent across the solar system past the Sun to a planet or satellite and returned to the Earth suffers an additional non-Newtonian delay in its round-trip travel time. A significant improvement in the value of was reported in 2003 from Doppler tracking of Cassini spacecraft, while it was on its way to Saturn, with a result [13]. Using this result, one maintains that massless scalar-tensor theories must have 40,000 to be compatible with this constraint [5].
2.3. Experimental Tests of BD Theory in Strong-Field Limit
- In a binary system with identical objects, dipole emission is suppressed. For example, a system with two neutron stars will result in weak dipole radiation, if there is any [5].
- Roger Penrose proposed that black holes in BD theory are identical to their GR counterparts. Motivated by this remark, Thorne and Dykla showed that during gravitational collapse to form a black hole, the BD scalar field is radiated away, in accordance with Price’s theorem, leaving only its constant asymptotic value, and a GR black hole [5,19].
2.4. Search for Nontensorial Gravitational Waves
3. Gravitational-Wave Signal from a Rotating Neutron Star in the Brans–Dicke Theory
3.1. Generation of Gravitational Waves in the Brans–Dicke Theory
3.2. Rotating Neutron Star
3.3. Gravitational Wave Signal from a Rotating Neutron Star
3.4. Response of the Interferometric Detector to a Gravitational-Wave Signal Forming a Rotating Neutron Star
4. Detection Statistic and Parameter Estimation
4.1. Data Analysis Method
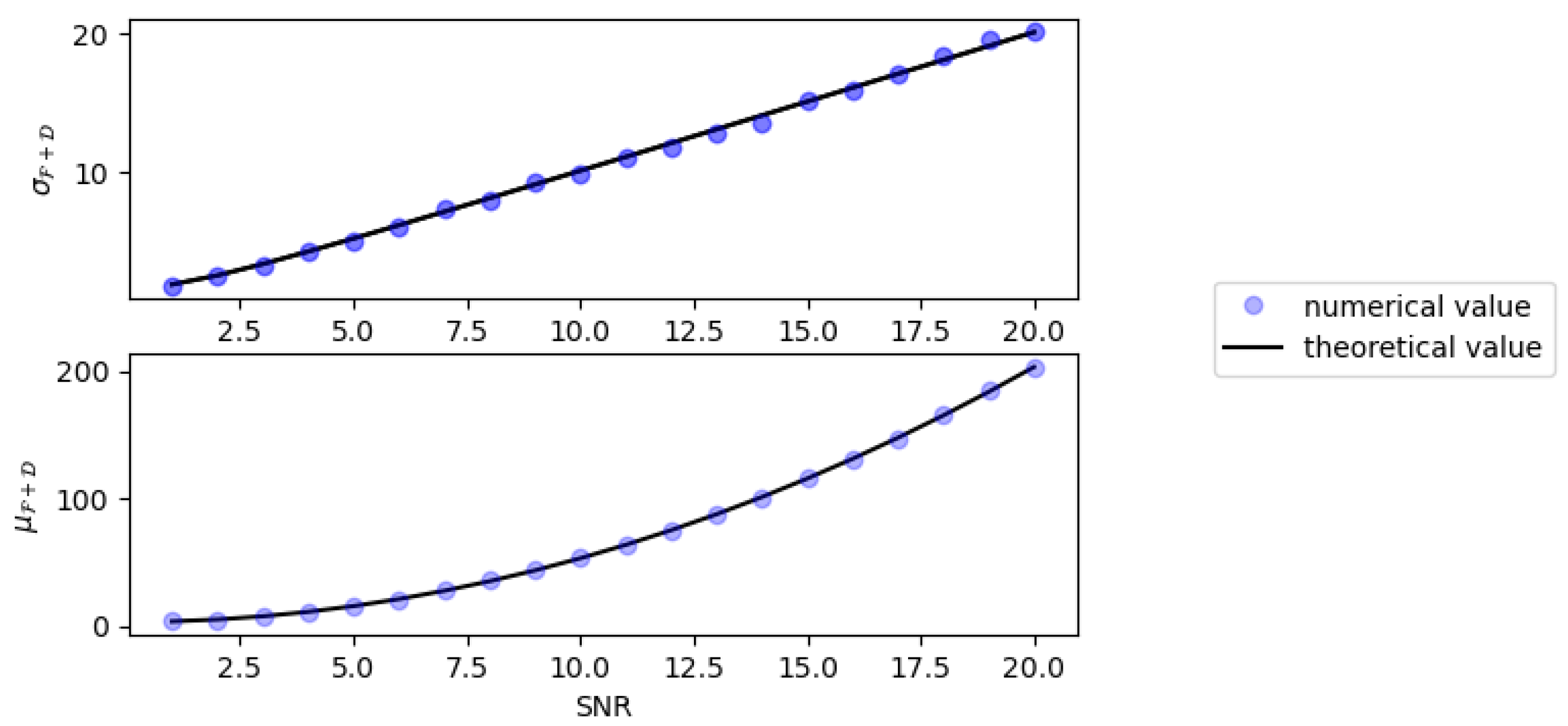
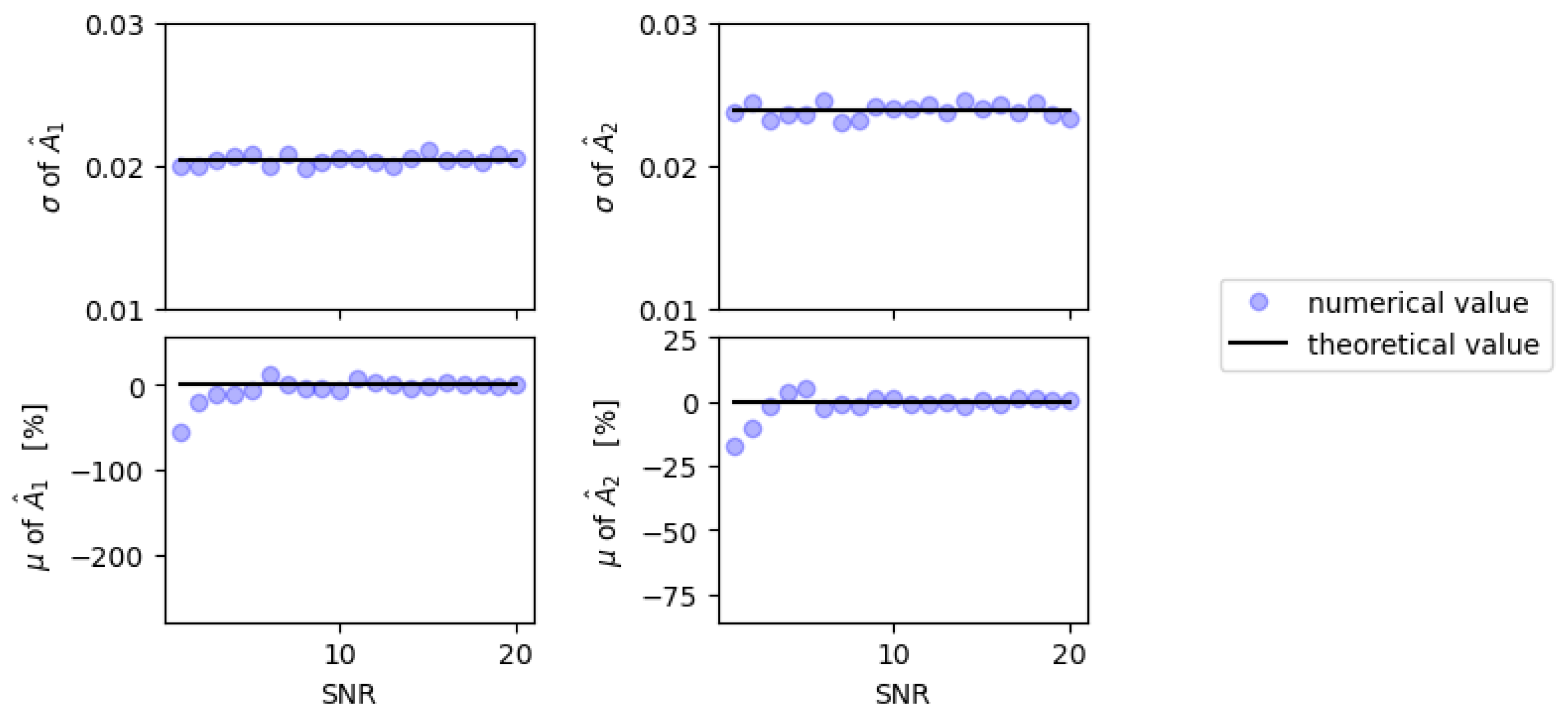
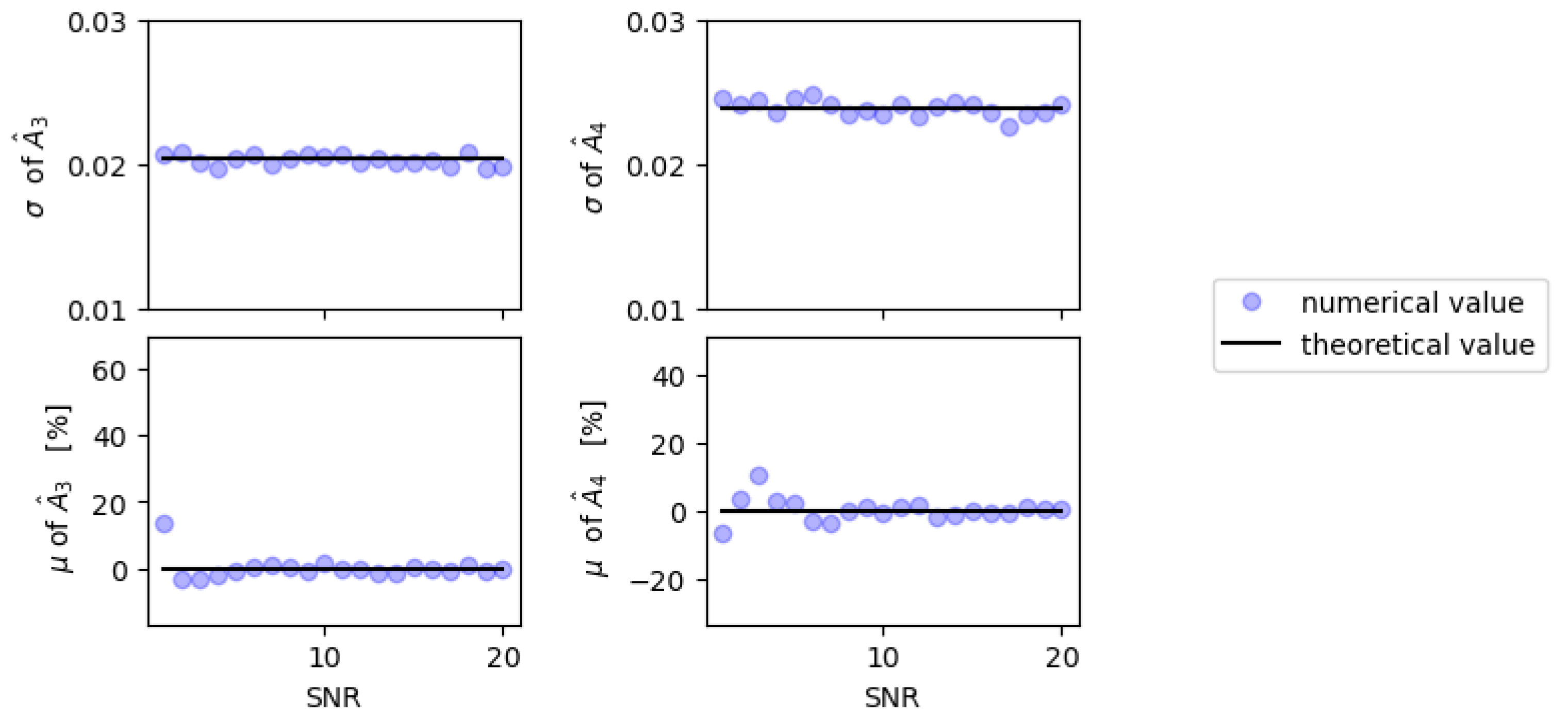
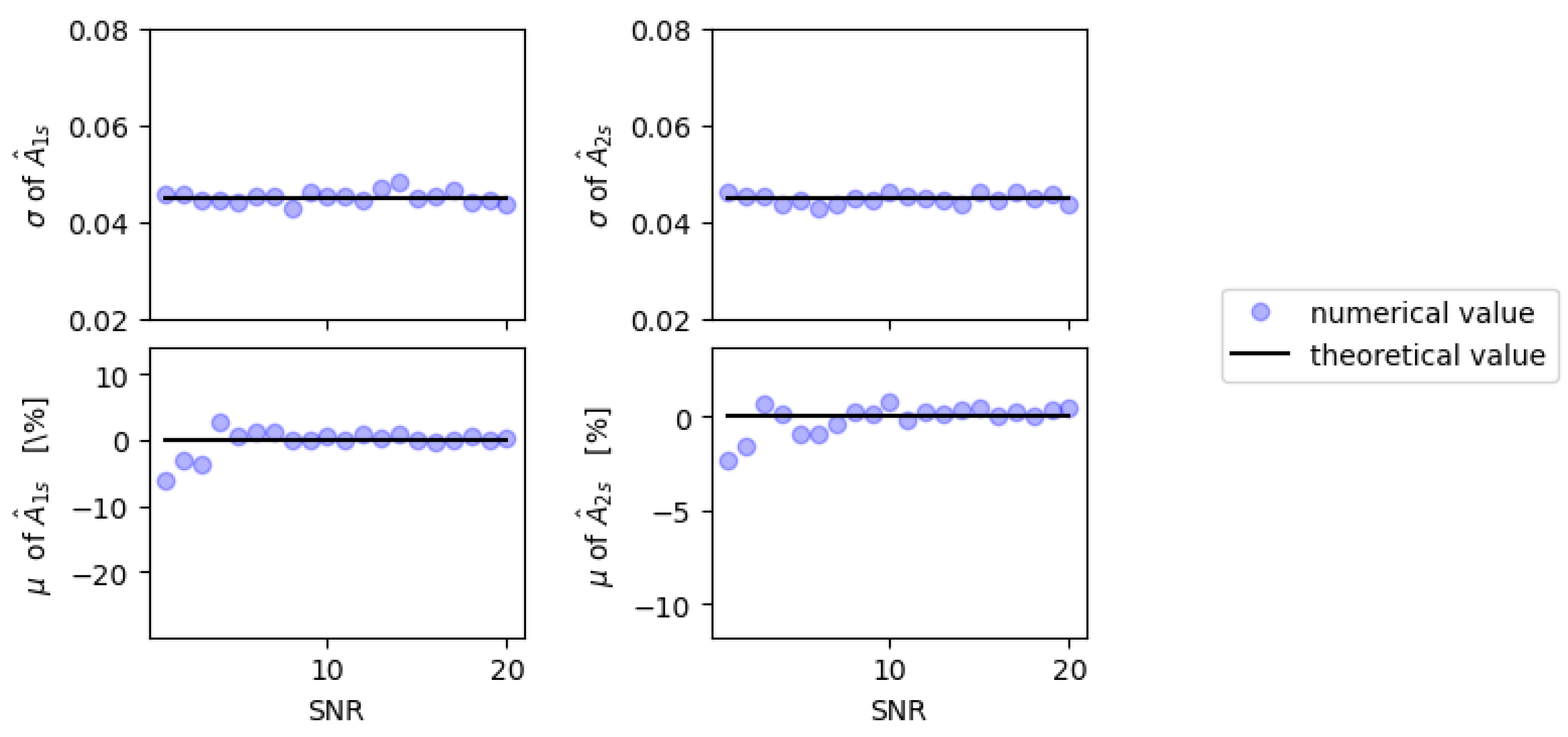
4.2. Monte Carlo Simulations
4.3. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brans, C.; Dicke, R.H. Mach’s Principle and a Relativistic Theory of Gravitation. Phys. Rev. Lett. 1961, 124, 925. [Google Scholar] [CrossRef]
- Jordan, P. Zum gegenwärtigen Stand der Diracschen kosmologischen Hypothesen. Z. Phys 1959, 157, 112–121. [Google Scholar] [CrossRef]
- Fierz, M. Über die physikalische Deutung der erweiterten Gravitationstheorie P. Jordans. Helv. Phys. Acta 1956, 29, 128–134. [Google Scholar]
- Bertolami, O.; Martins, P.J. Nonminimal coupling and quintessence. Phys. Rev. D 2000, 61, 064007. [Google Scholar] [CrossRef] [Green Version]
- Will, C.M. The Confrontation between General Relativity and Experiment. Living Rev. Relativ. 2014, 17, 4. [Google Scholar] [CrossRef] [Green Version]
- Poisson, E.; Will, C.M. Gravity Newtonian, Post-Newtonian, Relativistic; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Misner, C.W.; Thorne, K.S.; Wheeler, J.A. Gravitation; W. H. Freeman and Company: San Francisco, CA, USA, 1973. [Google Scholar]
- Lebach, D.E.; Corey, B.E.; Shapiro, I.I.; Ratner, M.I.; Webber, J.C.; Rogers, A.E.E.; Davis, J.L.; Herring, T.A. Measurement of the Solar Gravitational Deflection of Radio Waves Using Very-Long-Baseline Interferometry. Phys. Rev. Lett. 1995, 75, 1439. [Google Scholar] [CrossRef] [PubMed]
- Fomalont, E.; Kopeikin, S.; Lanyi, G.; Benson, J. Progress in Measurements of the Gravitational Bending of Radio Waves Using the VLBA. Astrophys. J. 2009, 699, 1395. [Google Scholar] [CrossRef] [Green Version]
- Shapiro, S.S.; Davis, J.L.; Lebach, D.E.; Gregory, J.S. Measurement of the Solar Gravitational Deflection of Radio Waves using Geodetic Very-Long-Baseline Interferometry Data, 1979–1999. A&A 2009, 499, 1. [Google Scholar]
- Lambert, S.B.; Le Poncin-Lafitte, C. Determining the relativistic parameter γ using very long baseline interferometry. A&A 2009, 499, 331–335. [Google Scholar]
- Lambert, S.B.; Le Poncin-Lafitte, C. Improved determination of γ by VLBI. A&A 2011, 529, A70. [Google Scholar]
- Bertotti, B.; Iess, L.; Tortora, P. A test of general relativity using radio links with the Cassini spacecraft. Nature 2003, 425, 374–376. [Google Scholar] [CrossRef]
- Konopliv, A.S.; Asmar, S.W.; Folkner, W.M.; Karatekin, O.; Nunes, D.C.; Smrekar, S.E.; Yoder, C.F.; Zuber, M.T. Mars high resolution gravity fields from MRO, Mars seasonal gravity, and other dynamical parameters. Icarus 2011, 211, 401–428. [Google Scholar] [CrossRef]
- Pitjeva, E.V. Relativistic Effects and Solar Oblateness from Radar Observations of Planets and Spacecraft. Astron. Lett. 2005, 31, 340–349. [Google Scholar] [CrossRef]
- Vijaykumar, A.; Kapadia, S.J.; Ajith, P. Constraints on the Time Variation of the Gravitational Constant Using Gravitational Wave Observations of Binary Neutron Stars. Phys. Rev. Lett. 2021, 126, 141104. [Google Scholar] [CrossRef] [PubMed]
- Córsico, A.H.; Althaus, L.G.; Berro, E.G.; Romero, A.D. An independent constraint on the secular rate of variation of the gravitational constant from pulsating white dwarfs. JCAP 2013, 2013, 32. [Google Scholar] [CrossRef]
- Nordtvedt, K., Jr. Equivalence Principle for Massive Bodies. I. Phenomenology. Phys. Rev. D 1968, 169, 1014. [Google Scholar] [CrossRef]
- Thorne, K.S.; Dykla, J.J. Black Holes in the Dicke-Brans Theory of Gravity. Astrophys. J. Lett. 1971, 166, L35–L38. [Google Scholar] [CrossRef]
- Freire, P.C.C.; Wex, N.; Esposito-Farése, G.; Verbiest, J.P.W.; Bailes, M.; Jacoby, B.A.; Kramer, M.; Stairs, I.H.; Antoniadis, J.; Janssen, G.H. The relativistic pulsar–white dwarf binary PSR J1738+0333 – II. The most stringent test of scalar–tensor gravity. MNRAS 2012, 423, 3328. [Google Scholar] [CrossRef]
- Bhat, N.D.R.; Bailes, M.; Verbiest, J.P.W. Gravitational-radiation losses from the pulsar white-dwarf binary PSR J1141 6545. Phys. Rev. D 2008, 77, 124017. [Google Scholar] [CrossRef]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; Adya, V.B. Tests of General Relativity with GW170817. Phys. Rev. Lett. 2019, 123, 011102. [Google Scholar] [CrossRef] [Green Version]
- Riles, K. Recent searches for continuous gravitational waves. Mod. Phys. Lett. A 2017, 32, 1730035. [Google Scholar] [CrossRef]
- Aasi, J.; Abbott, B.P.; Abbott, T.; Abernathy, M.R.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; Adya, V.; et al. Advanced LIGO. Class. Quantum Grav. 2015, 32, 074001. [Google Scholar]
- Acernese, F.; Agathos, M.; Agatsuma, K.; Aisa, D.; Allemandou, N.; Allocca, A.; Amarni, J.; Astone, P.; Balestri, G.; Ballardin, G.; et al. Advanced Virgo: a second-generation interferometric gravitational wave detector. Class. Quantum Grav. 2015, 32, 024001. [Google Scholar] [CrossRef] [Green Version]
- Akutsu, T.; Ando, M.; Arai, K.; Arai, Y.; Araki, S.; Araya, A.; Aritomi, N.; Aso, Y.; Bae, S.; Bae, Y.; et al. Overview of KAGRA: Detector design and construction history. arXiv 2005, arXiv:2005.05574. [Google Scholar]
- Abbott, B.P.; Abbott, R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; Adya, V.B.; Affeldt, C.; et al. First Search for Nontensorial Gravitational Waves from Known Pulsars. Phys. Rev. Lett. 2018, 120, 031104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Isi, M.; Pitkin, M.; Weinstein, A.J. Probing Dynamical Gravity with the Polarization of Continuous Gravitational Waves. Phys. Rev. D. 2017, 96, 042001. [Google Scholar] [CrossRef] [Green Version]
- Królak, A.; Jaranowski, P. Analysis of Gravitational-Wave Data; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Jaranowski, P.; Królak, A.; Schutz, B.F. Data analysis of gravitational-wave signals from spinning neutron stars: The signal and its detection. Phys. Rev. D 1998, 58, 063001. [Google Scholar] [CrossRef] [Green Version]
- Abbott, R.; Abbott, T.D.; Abraham, S.; Acernese, F.; Ackley, K.; Adams, A.; Adams, C.; Adhikari, R.X.; Adya, V.B.; Affeldt, C.; et al. Gravitational-wave Constraints on the Equatorial Ellipticity of Millisecond Pulsars. Astrophys. J. Lett. 2020, 902, L21. [Google Scholar] [CrossRef]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abraham, S.; Acernese, F.; Ackley, K.; Adams, C.; Adhikari, R.X.; Adya, V.B.; Affeldt, C.; et al. Narrow-band search for gravitational waves from known pulsars using the second LIGO observing run. Phys. Rev. D 2019, 2002. [Google Scholar] [CrossRef] [Green Version]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abernathy, M.R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; et al. First Search for Gravitational Waves from Known Pulsars with Advanced LIGO. Astrophys. J. 2017, 839, 12. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Verma, P. Probing Gravitational Waves from Pulsars in Brans–Dicke Theory. Universe 2021, 7, 235. https://doi.org/10.3390/universe7070235
Verma P. Probing Gravitational Waves from Pulsars in Brans–Dicke Theory. Universe. 2021; 7(7):235. https://doi.org/10.3390/universe7070235
Chicago/Turabian StyleVerma, Paritosh. 2021. "Probing Gravitational Waves from Pulsars in Brans–Dicke Theory" Universe 7, no. 7: 235. https://doi.org/10.3390/universe7070235
APA StyleVerma, P. (2021). Probing Gravitational Waves from Pulsars in Brans–Dicke Theory. Universe, 7(7), 235. https://doi.org/10.3390/universe7070235