An Experimental Characterization of TORVEastro, Cable-Driven Astronaut Robot



Abstract
:1. Introduction
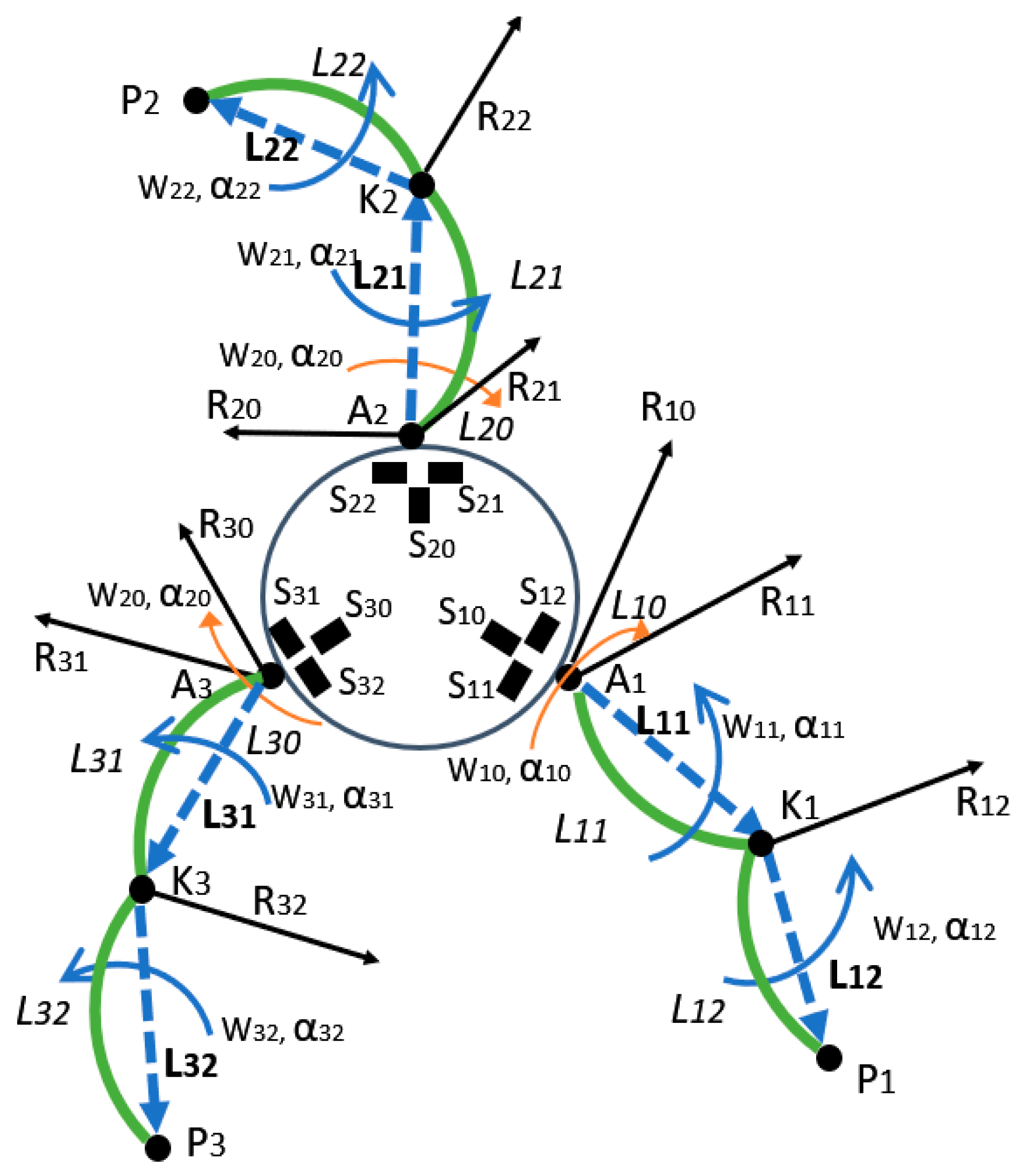
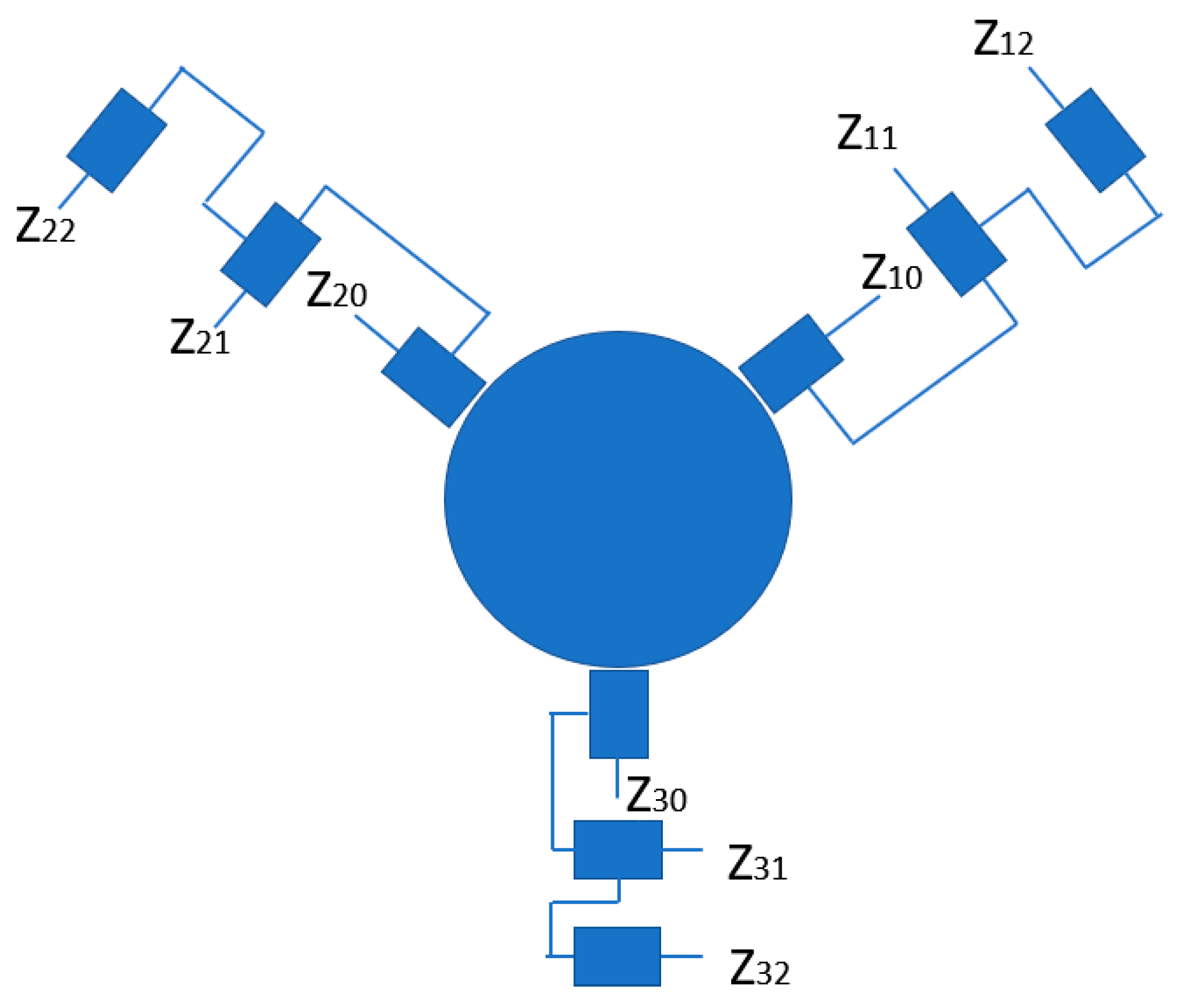
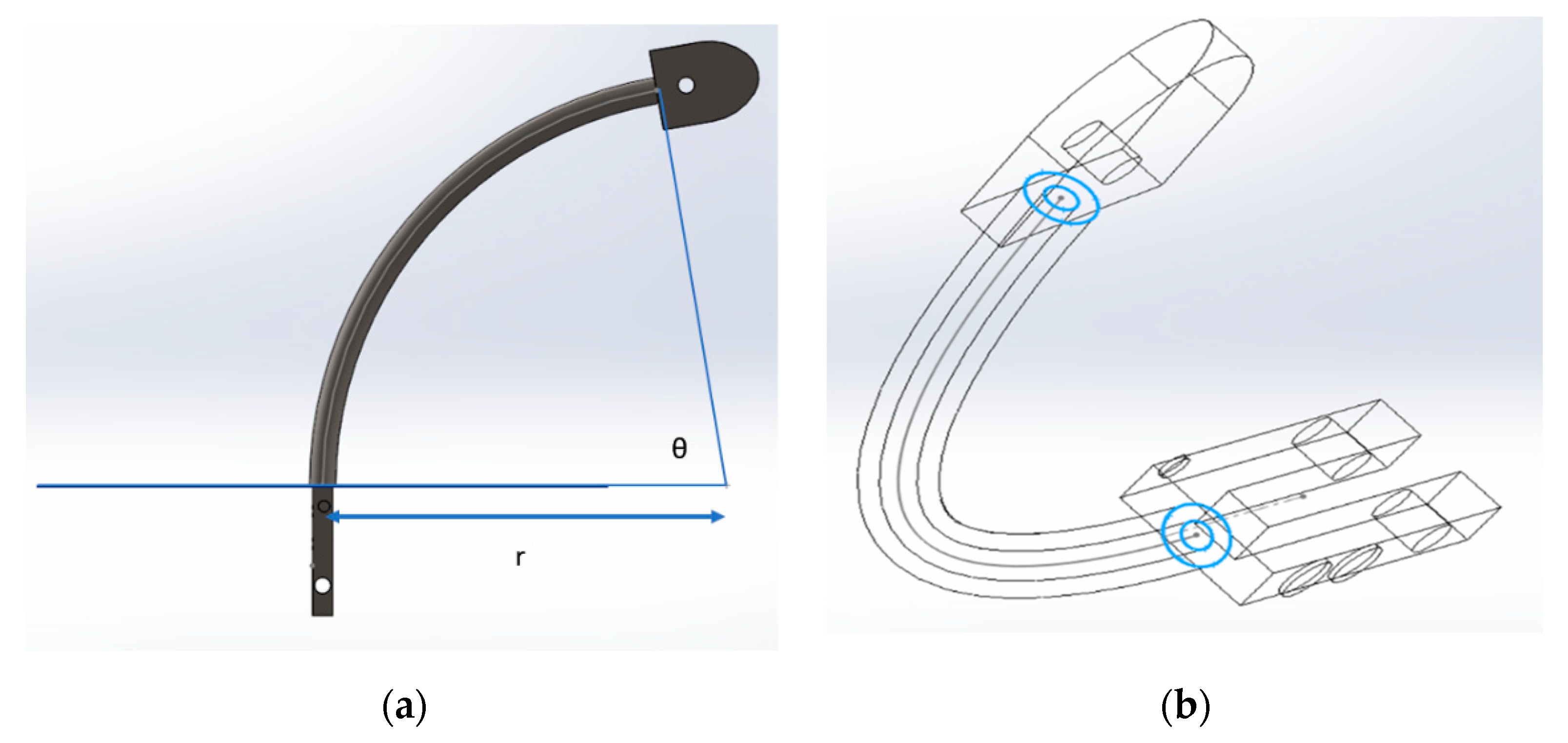
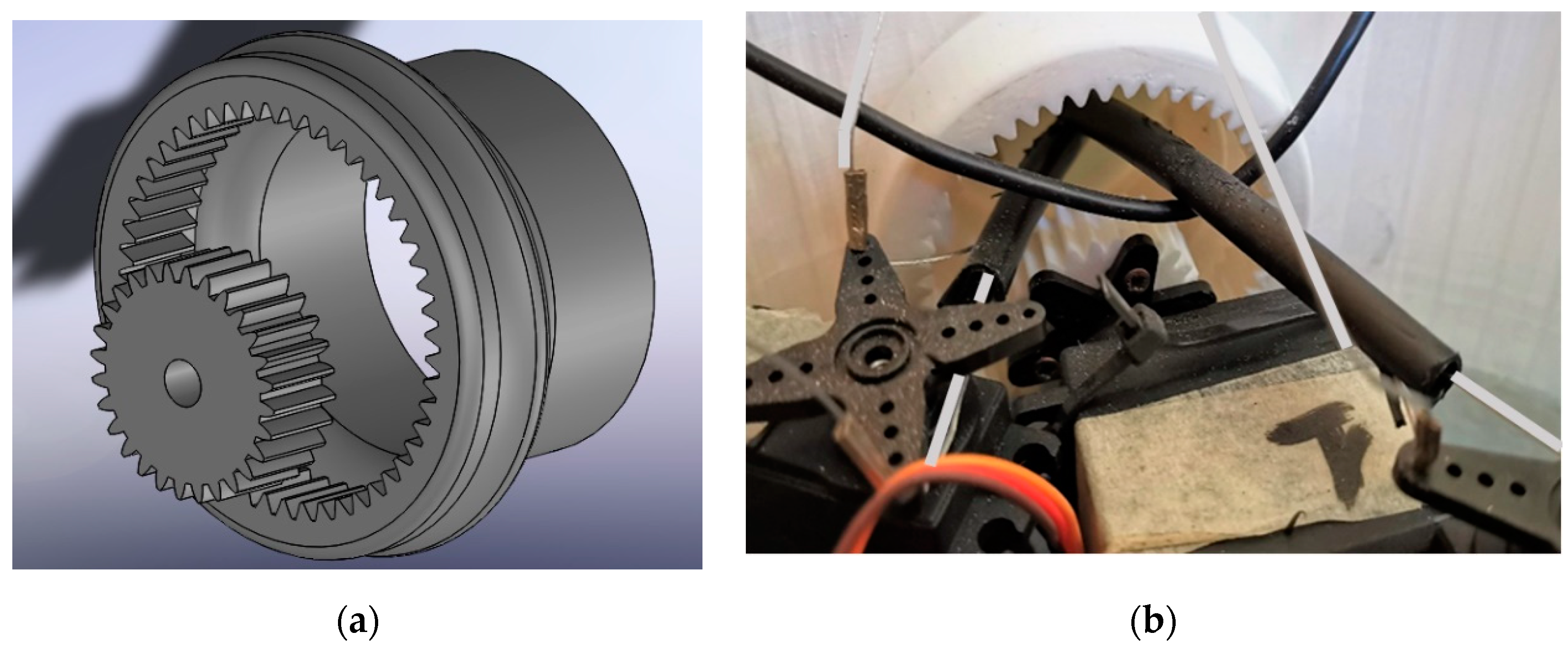
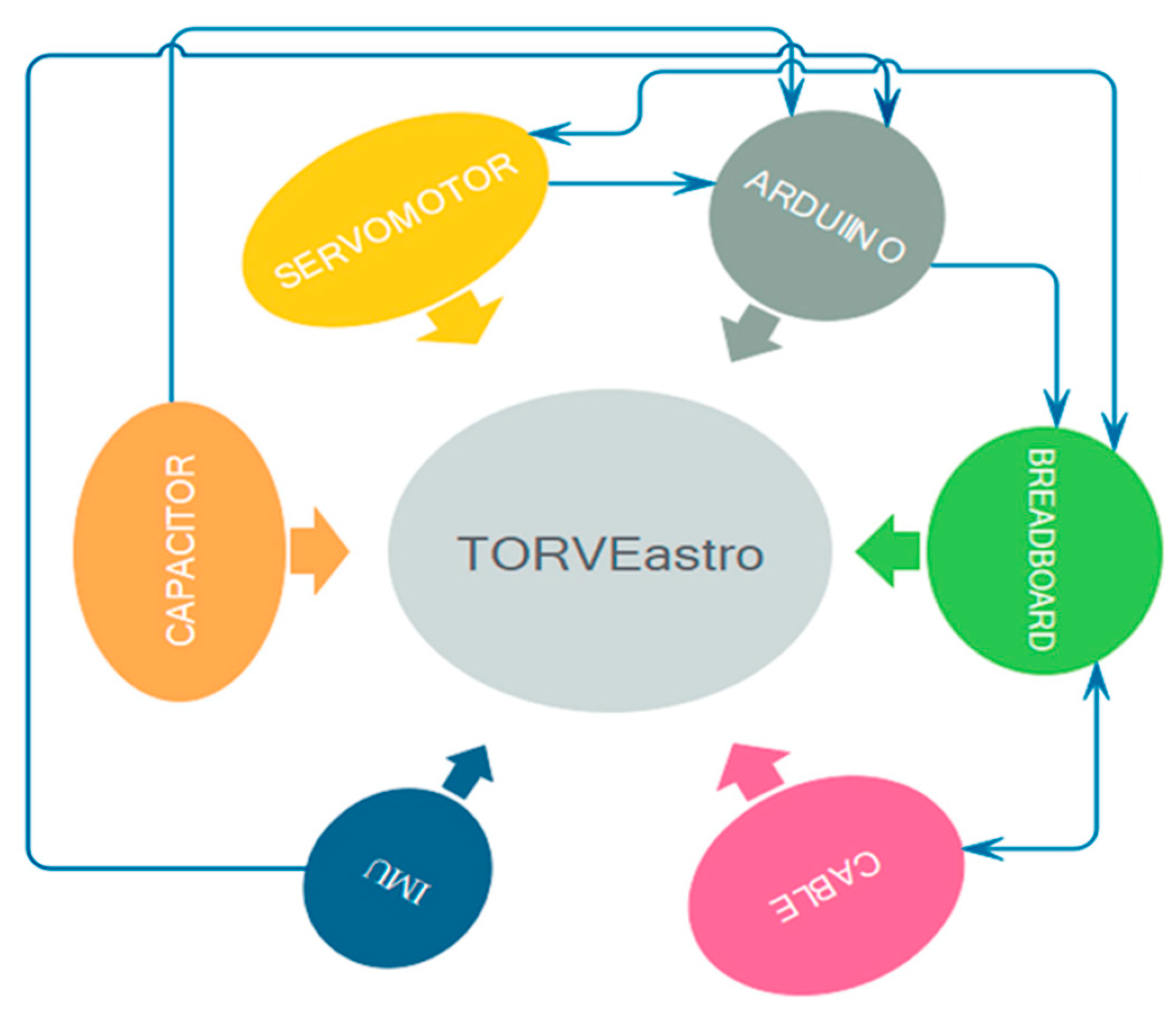
2. TORVEastro Design
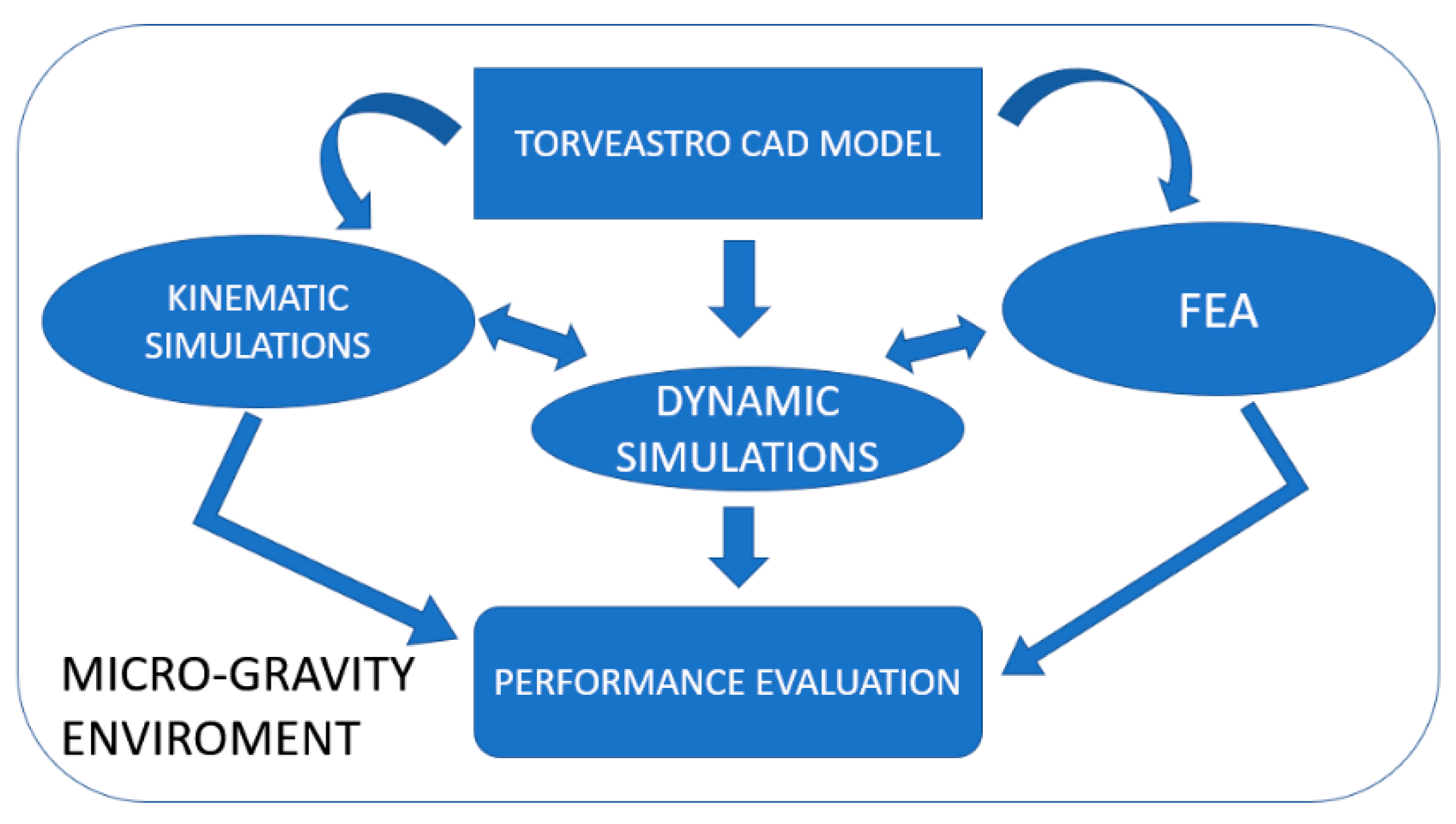
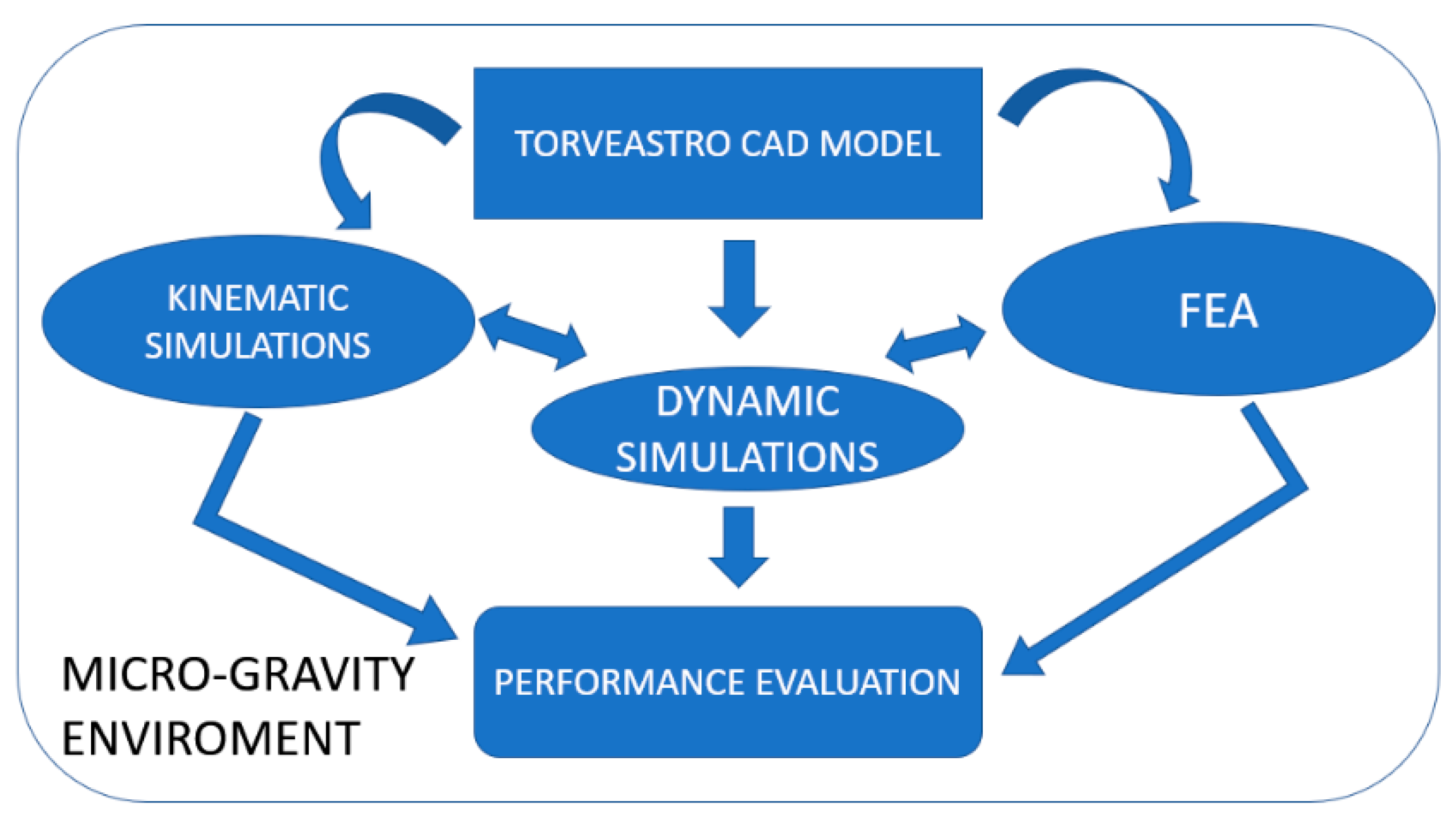
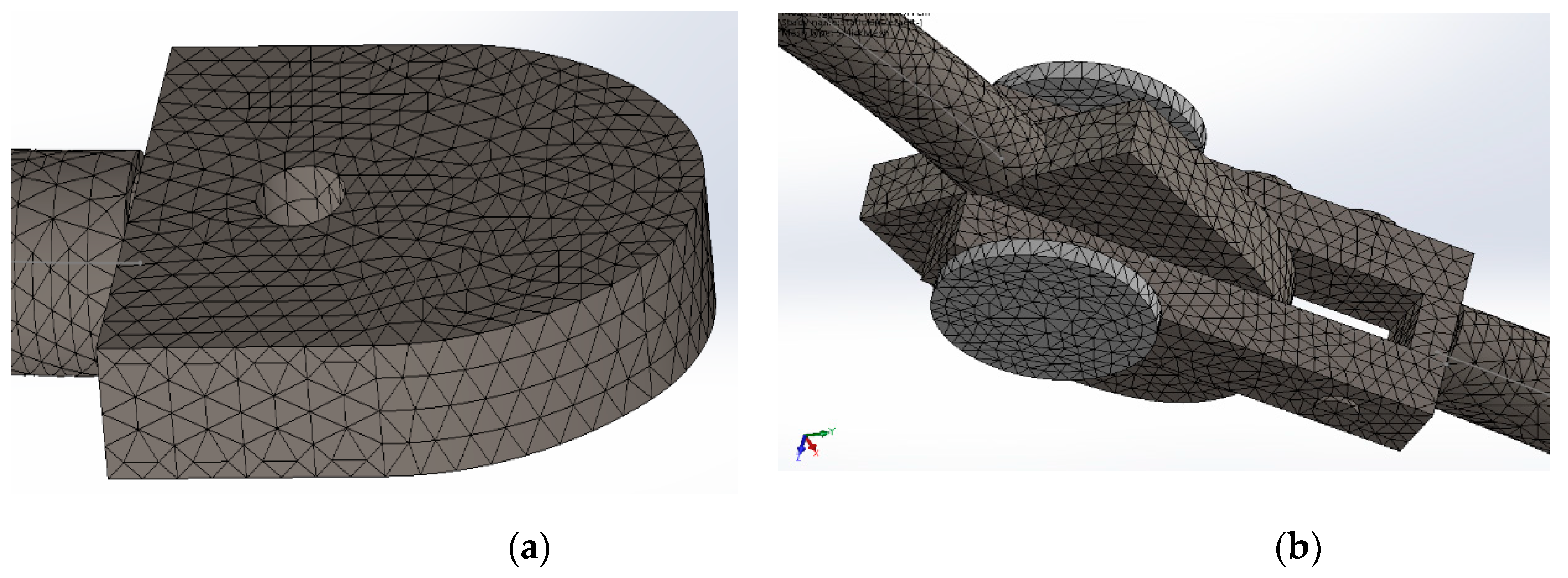
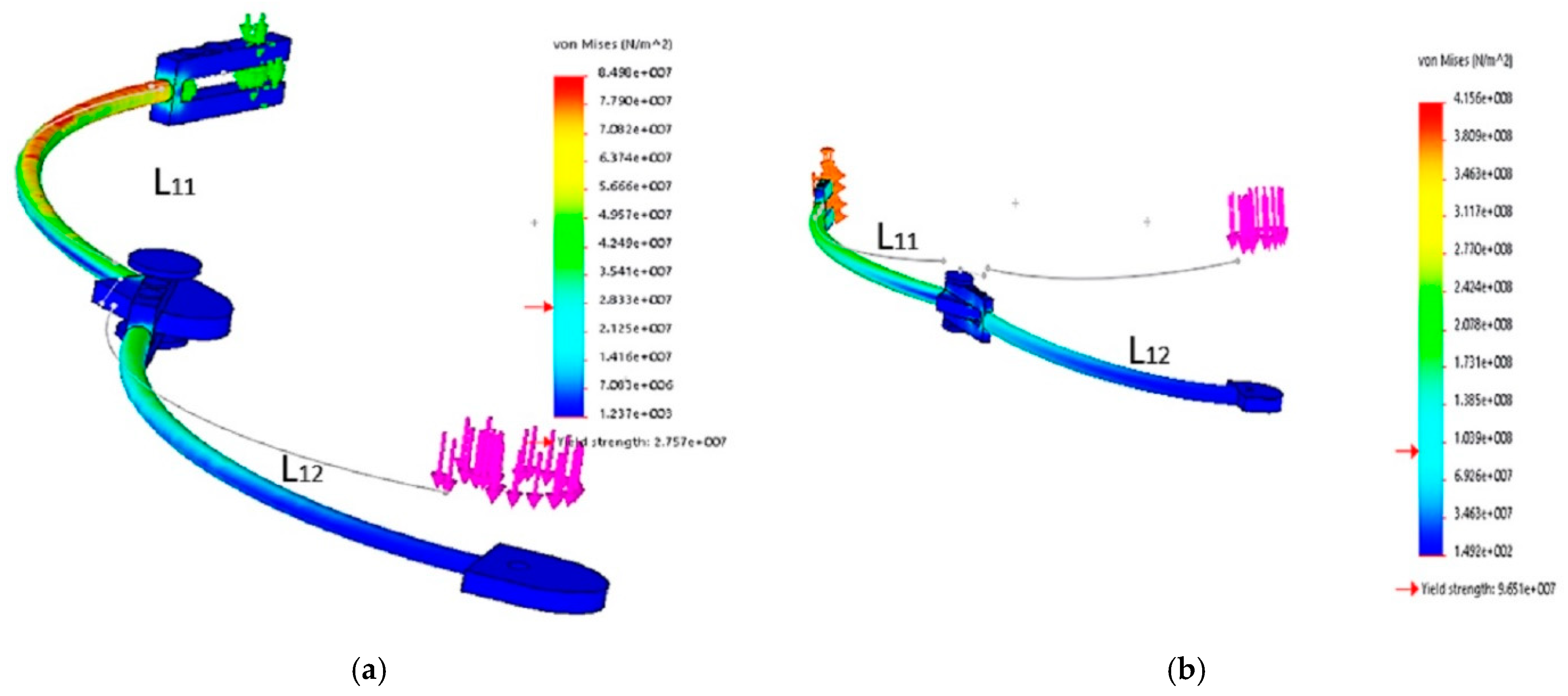
3. Performance Simulation
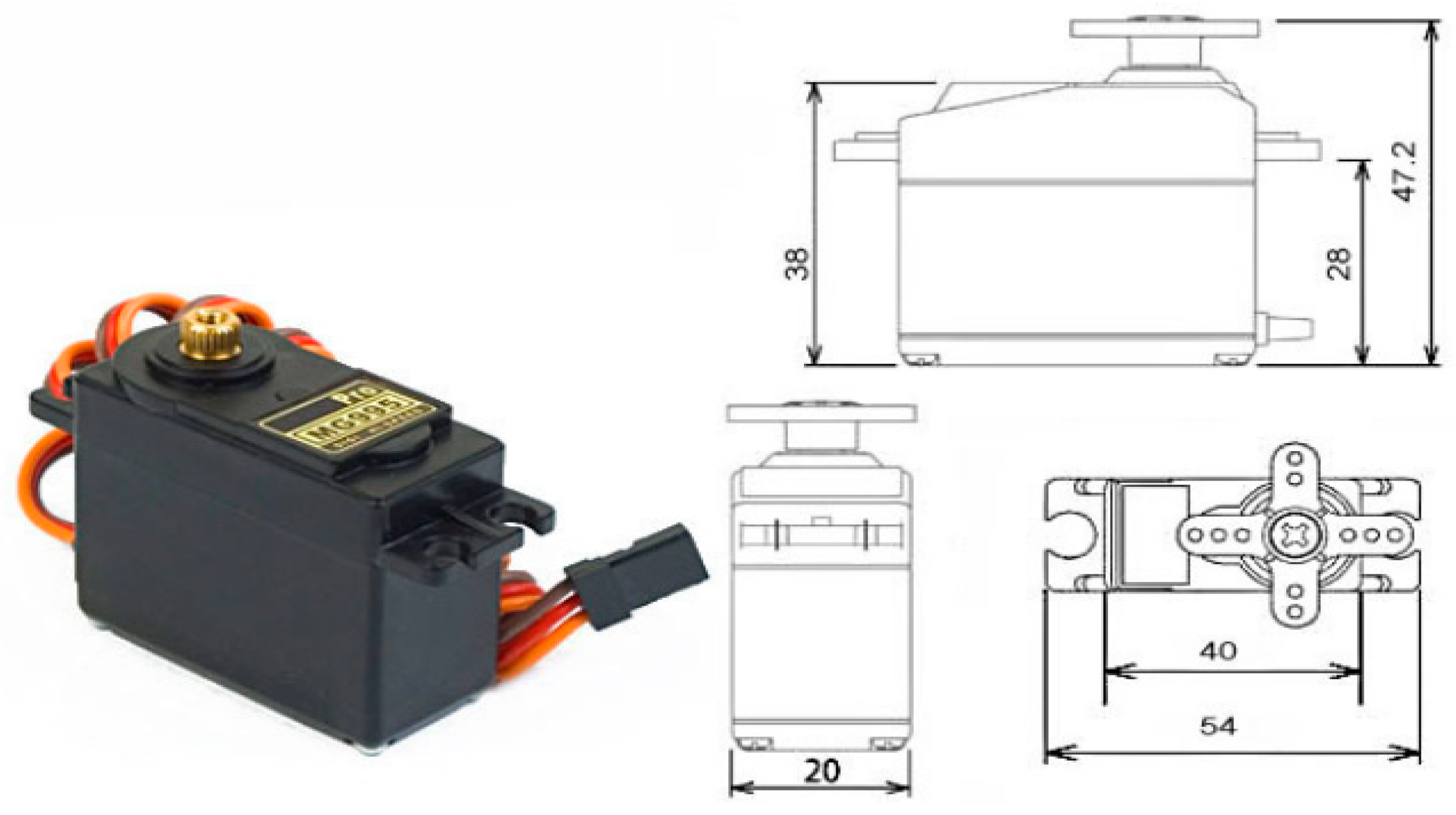
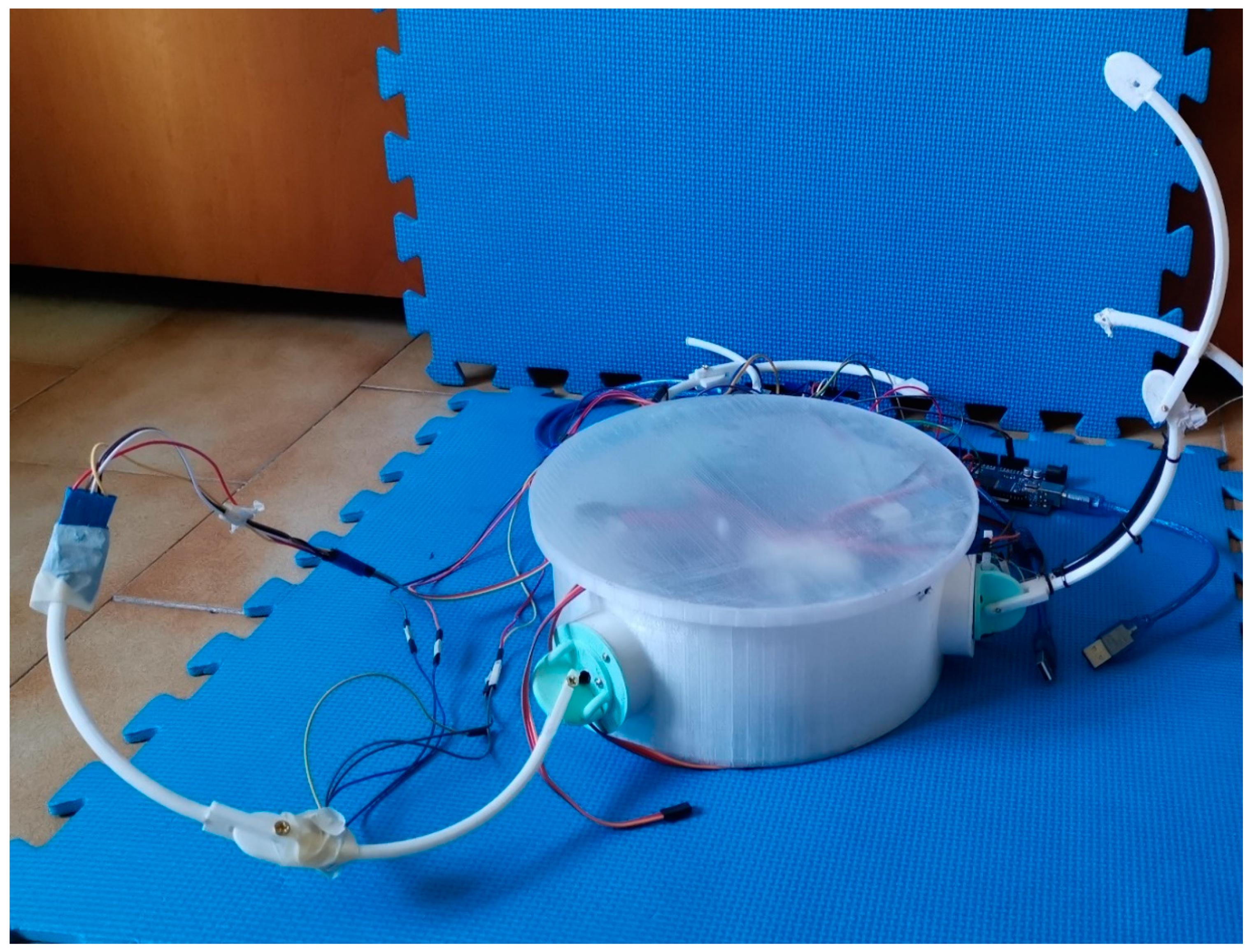
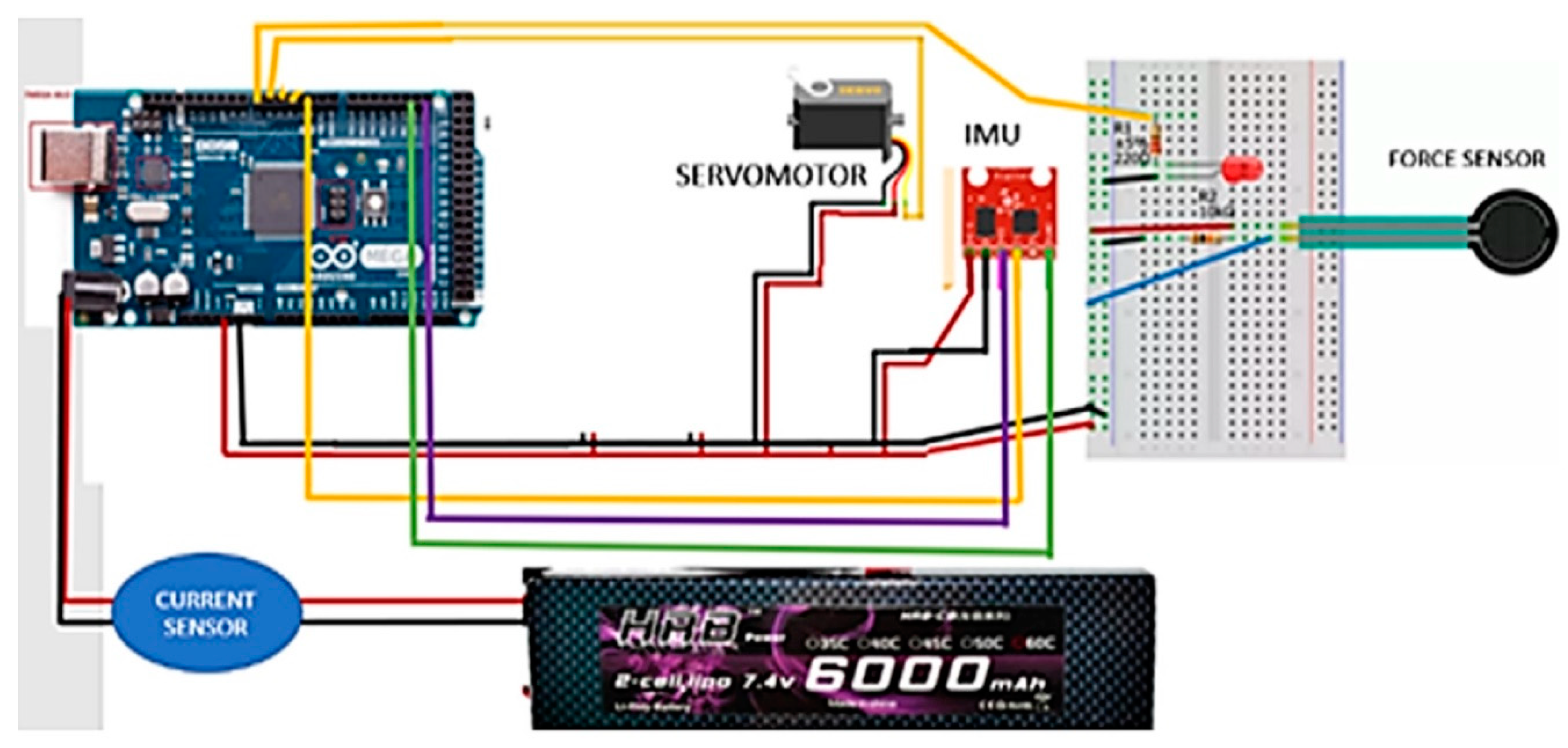
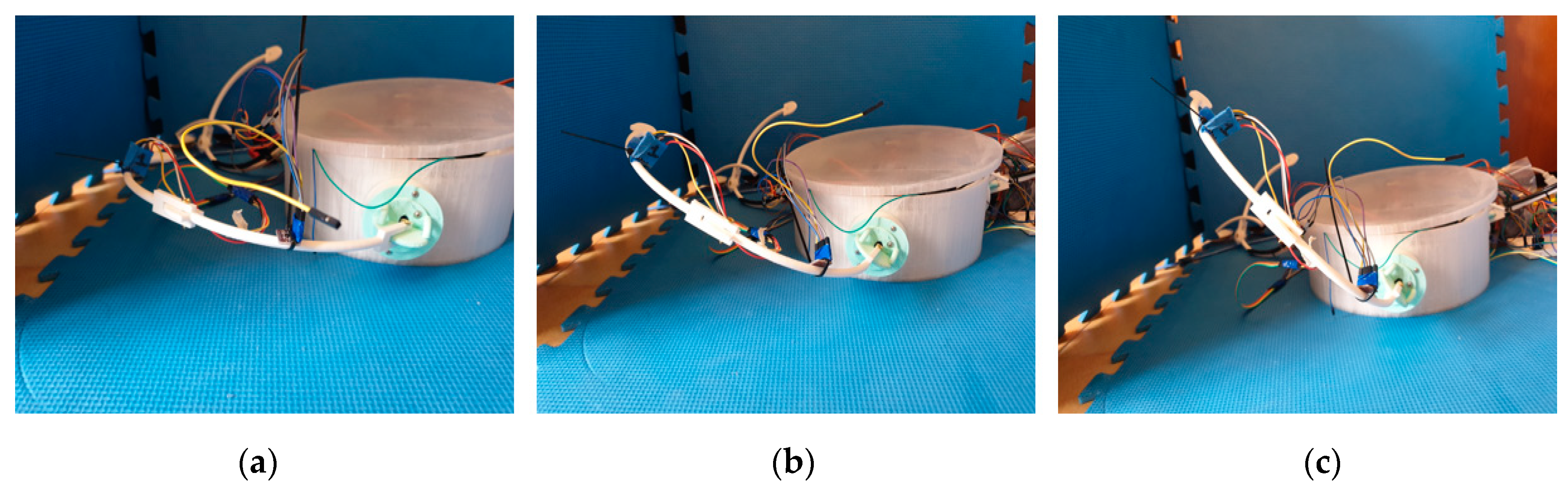
4. Prototype and Testing Modes
5. Experimental Results
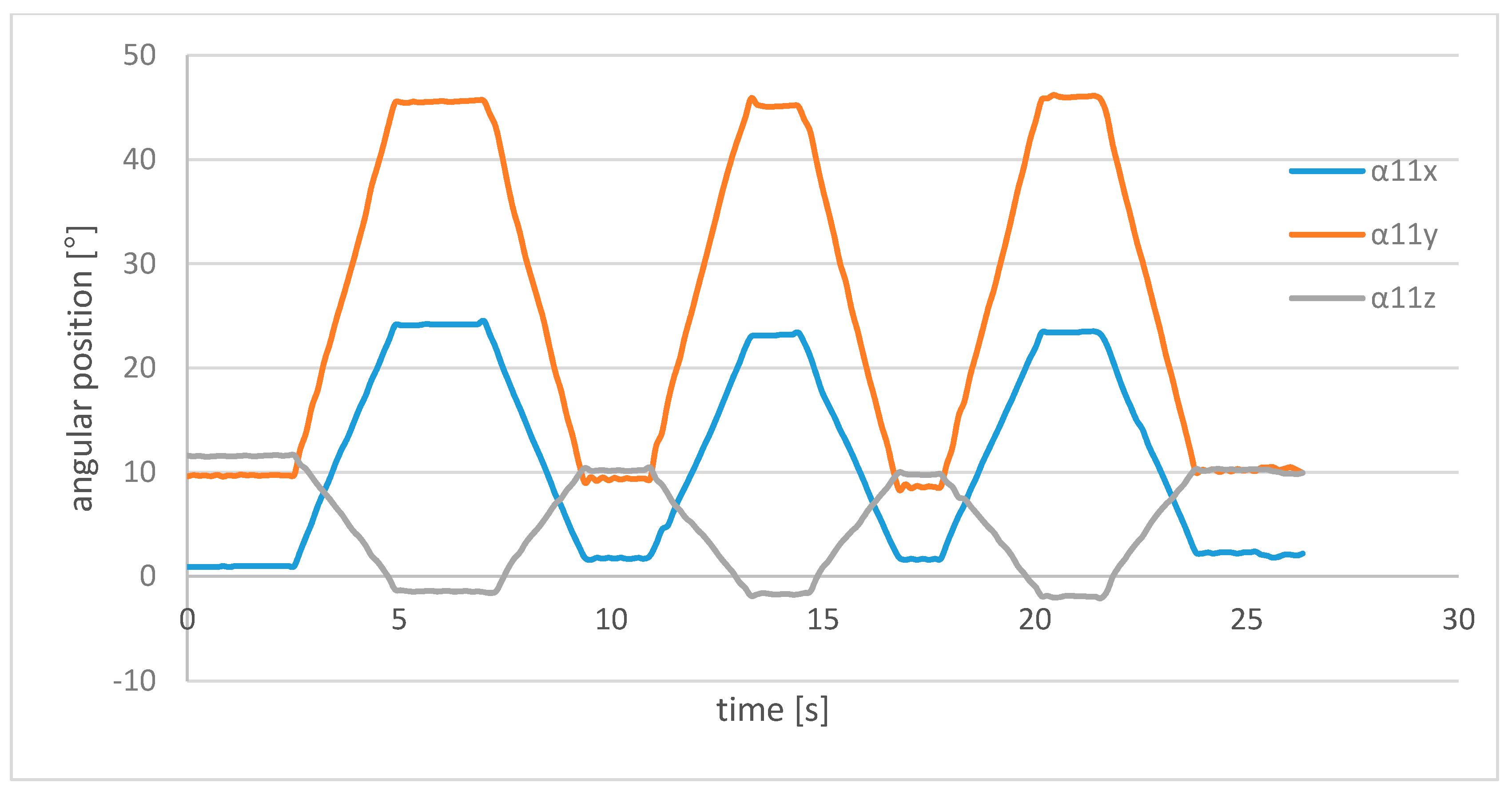
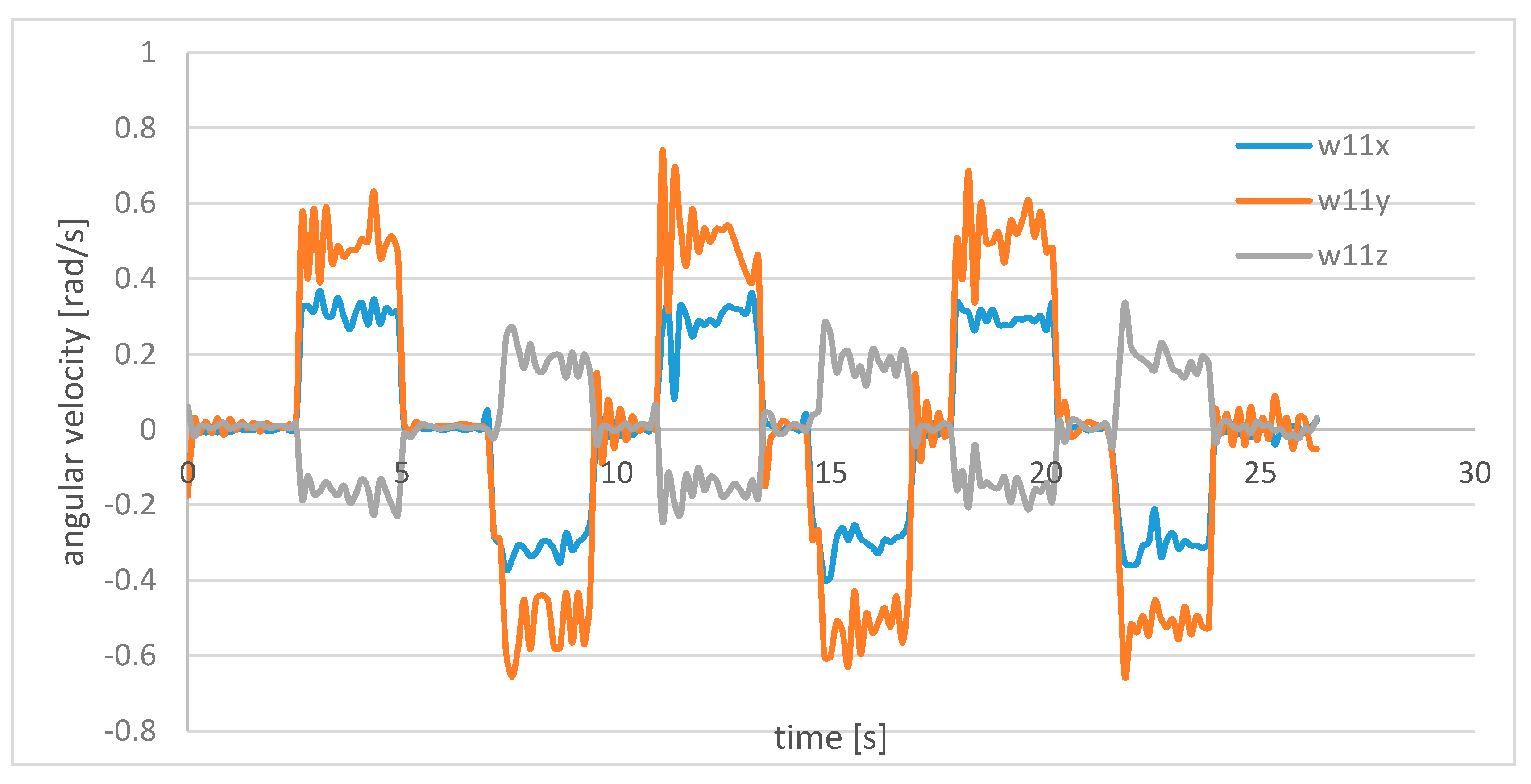
5.1. Experimental Test 1
5.2. Experimental Test 2
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Rembala, R.; Ower, C. Robotic assembly and maintenance of future space stations based on the ISS mission operations experience. Acta Astronaut. 2009, 65, 912–920. [Google Scholar] [CrossRef]
- Ceccarelli, M. Service Robots and Robotics: Design and Application; Chapter 1: Engineering Science Reference; IGI Global: Hershey, PA, USA, 2012; pp. 1–14. [Google Scholar]
- ESA. Analysis and Prediction, the European Space Agency. Available online: https://www.esa.int/Safety_Security/Space_Debris/Analysis_and_prediction (accessed on 25 September 2020).
- Shan, M.; Guo, J.; Gill, E. Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 2016, 80, 18–32. [Google Scholar] [CrossRef]
- Thronson, H.A.; Akin, D.; Grunsfeld, J.; Lester, D. The evolution and promise of robotic in space servicing. In Proceedings of the AIAA SPACE Conference & Exposition, Pasadena, CA, USA, 14–17 September 2009; pp. 1–6. [Google Scholar]
- IFR. International Federation of Robotics. Available online: https://ifr.org/ (accessed on 22 July 2020).
- ISO 8373:2012 Robots and Robotic Devices. Available online: https://www.iso.org/standard/55890.html (accessed on 22 July 2020).
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef] [Green Version]
- NASA. International Space Station. Available online: https://www.nasa.gov/mission_pages/station/main/index.html (accessed on 29 September 2020).
- Catchpole, J. The International Space Station: Building for the Future, Scientific Areas of Springer Praxis Books; Praxis: Chichester, UK, 2010. [Google Scholar]
- Devett, J.M. International Space Station and Its Role in the Future of Space Exploration. Ph.D. Thesis, Oklahoma State University, Stillwater, OK, USA, May 2018. [Google Scholar]
- Weber, B.; Balachandran, R.; Riecke, C.; Stulp, F.; Stelzer, M. Teleoperating Robots from the International Space Station: Microgravity Effects on Performance with Force Feedback. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 8144–8150. [Google Scholar]
- Kim, K.; Bruce, A.; Joyce, A.; Edward, A. NASA Glenn Research Center’s Materials International Space Station Experiments. In Proceedings of the International Symposium on SM/MPAC and SEED Experiments, Tsukuba, Japan, 10–11 March 2008. NASA/TM-2008-215482. [Google Scholar]
- Oda, M. Space robot experiments on NASDA’s ETS-VI1 satellite-preliminary overview of the experiment results. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 2, pp. 1390–1395. [Google Scholar]
- Wang, P.; Cai, Y. Space environment data field modeling and visualization. In Proceedings of the Eleventh International Conference on Graphics and Image Processing, Hangzhou, China, 12–14 October 2019; Volume 11373, pp. 636–643. [Google Scholar]
- Belanche, D.; Casaló, L.V.; Flavian, C.; Schepers, J. Service robot implementation: a theoretical framework and research agenda. Serv. Ind. J. 2020, 40, 203–225. [Google Scholar] [CrossRef] [Green Version]
- Neufeld, M.J. Spaceflight: A Concise History; MIT Press Essential Knowledge Series Book; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Yoshida, K.; Wilcox, B. Space Robots and Systems; Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1031–1063. [Google Scholar]
- Ceccarelli, M.; Li, H.; Carbone, G.; Huang, Q. Conceptual Kinematic Design and Performance Evaluation of a Chameleon-Like Service Robot for Space Stations. Int. J. Adv. Robot. Syst. 2015, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Borst, C.; Fischer, M.; Hirzinger, G. Grasp planning: How to choose a suitable task wrench space. In Proceedings of the IEEE International Conference on Robotics and Automation. Proceedings ICRA International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 319–325. [Google Scholar]
- Csorba, K.; Varga, D.; Tevesz, G.; Vajk, E.I. The RobonAUT Autonomous Mobile Robot Construction Contest? IFAC International Federation of Automatic Control: Budapest, Hungary, 2012; Volume 9, pp. 360–365. [Google Scholar]
- ESA. European Space Agency. Available online: https://www.esa.int/ (accessed on 9 January 2020).
- Burridge, R.; Graham, J.; Shillcutt, K.; Hirsh, R.; Kortenkamp, D. Experiments with an EVA Assistant Robot. In Proceedings of the Intemational Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS 2003), Nara, Japan, 19–23 May 2003. [Google Scholar]
- Leidner, D.; Schmaus, P.; Schmidt, F.; Bauer, A.S.; Pleintinger, B.; Bayer, R.; Krueger, T.; Schiele, A.; Lii, N. Global Remote Operation of Intelligent Space Robot Assistants. In Proceedings of the Thirty-Third AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 9863–9864. [Google Scholar]
- Wang, E. Japan Robot Chats with Astronaut on Space Station. Available online: https://phys.org/news/2013-12-japan-robot-chats-astronaut-space.html (accessed on 23 July 2020).
- Didot, F.; Dettmann, J.; Losito, N.S.; Torfs, D.; Colombina, G. JERICO: A demonstration of autonomous robotic servicing on the Mir space station. Robot. Auton. Syst. 1998, 23, 29–36. [Google Scholar] [CrossRef]
- Hirzinger, G.; Brunner, B.; Dietrich, J. ROTEX-the first remotely controlled robot in space. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 2002; Volume 3, pp. 2604–2611. [Google Scholar]
- Gibbs, G.; Sachdev, S. Canada and the International Space Station Program: Overview and Status. Acta Astronaut. 2002, 51, 591–600. [Google Scholar] [CrossRef]
- Li, H.; Ceccarelli, M.; Huang, M.Q.; Carbone, G. Problems and Requirements for a Chameleon-Like Service Robot in Space Station. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2011), Budapest, Hungary, 3–7 July 2011; pp. 463–468. [Google Scholar]
- Yoshida, K. Achievements in space robotics. IEEE Robot. Autom. Mag. 2009, 16, 20–28. [Google Scholar] [CrossRef]
- Sun, Z.; Li, H.; Jiang, Z.; Song, Z.; Mo, Y.; Ceccarelli, M. Prototype Design and Performance Tests of Beijing’s Astronaut Robot. Appl. Sci. 2018, 8, 1342. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Chen, Z.; Wang, X.; Liang, B. Overview and Prospect of Key Technologies of Teleoperation of Space Robot. Aerosp. Control Appl. 2014, 40, 1–9. [Google Scholar]
- Yoshida, K. ETS-VII Flight Experiments for Space Robot Dynamics and Control, Experimental Robotics VII, Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2002; Volume 271, pp. 209–218. [Google Scholar]
- Samani, F.; Ceccarelli, M. Design and performance simulation of TORVEastro three-link astronaut robot. IOP Conf. Ser. Mater. Sci. Eng. 2019, 659, 012010. [Google Scholar] [CrossRef]
- Samani, F.; Ceccarelli, M. Prototype Design and Testing of TORVEastro, Cable-Driven Astronaut Robot, Mechanisms and Machine Science, Advances in Service and Industrial Robotics; Springer: Cham, Switherlands, 2020; Volume 80, pp. 448–455. [Google Scholar]
- Chao, H.; Coopmans, C.; Di, L.; Chen, Y. A comparative evaluation of low-cost IMUs for unmanned autonomous systems. In Proceedings of the IEEE Conference on Multisensor Fusion and Integration, Salt Lake City, UT, USA, 5–7 September 2010; pp. 211–216. [Google Scholar]
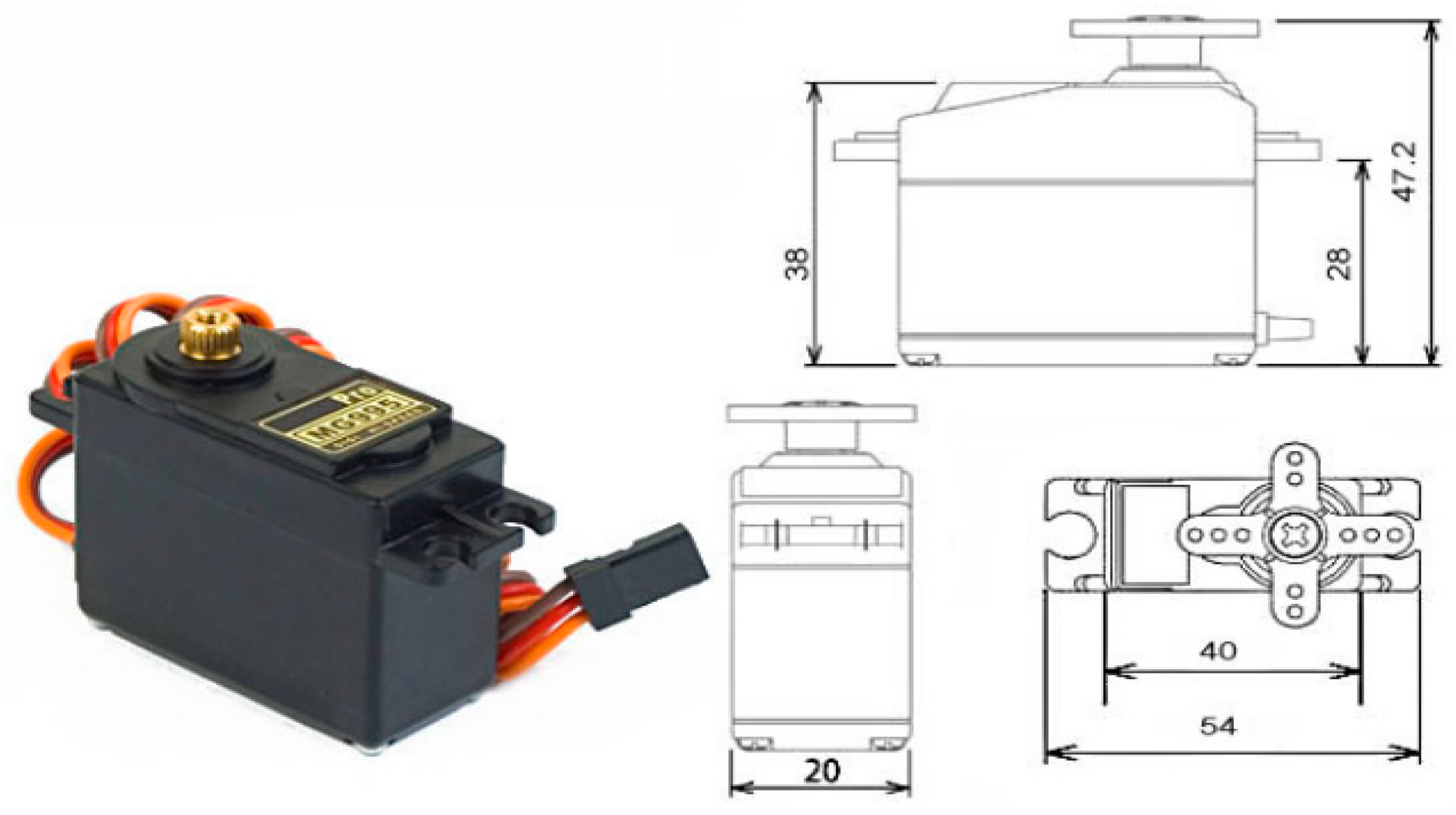
- TowerPro MG995 Servo. Available online: https://datasheetspdf.com/pdf/839879/ETC/MG995/1 (accessed on 27 July 2020).


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | L11 | L12 | Ref. Fig. | ||||
|---|---|---|---|---|---|---|---|
| axis | x | y | z | x | y | z | |
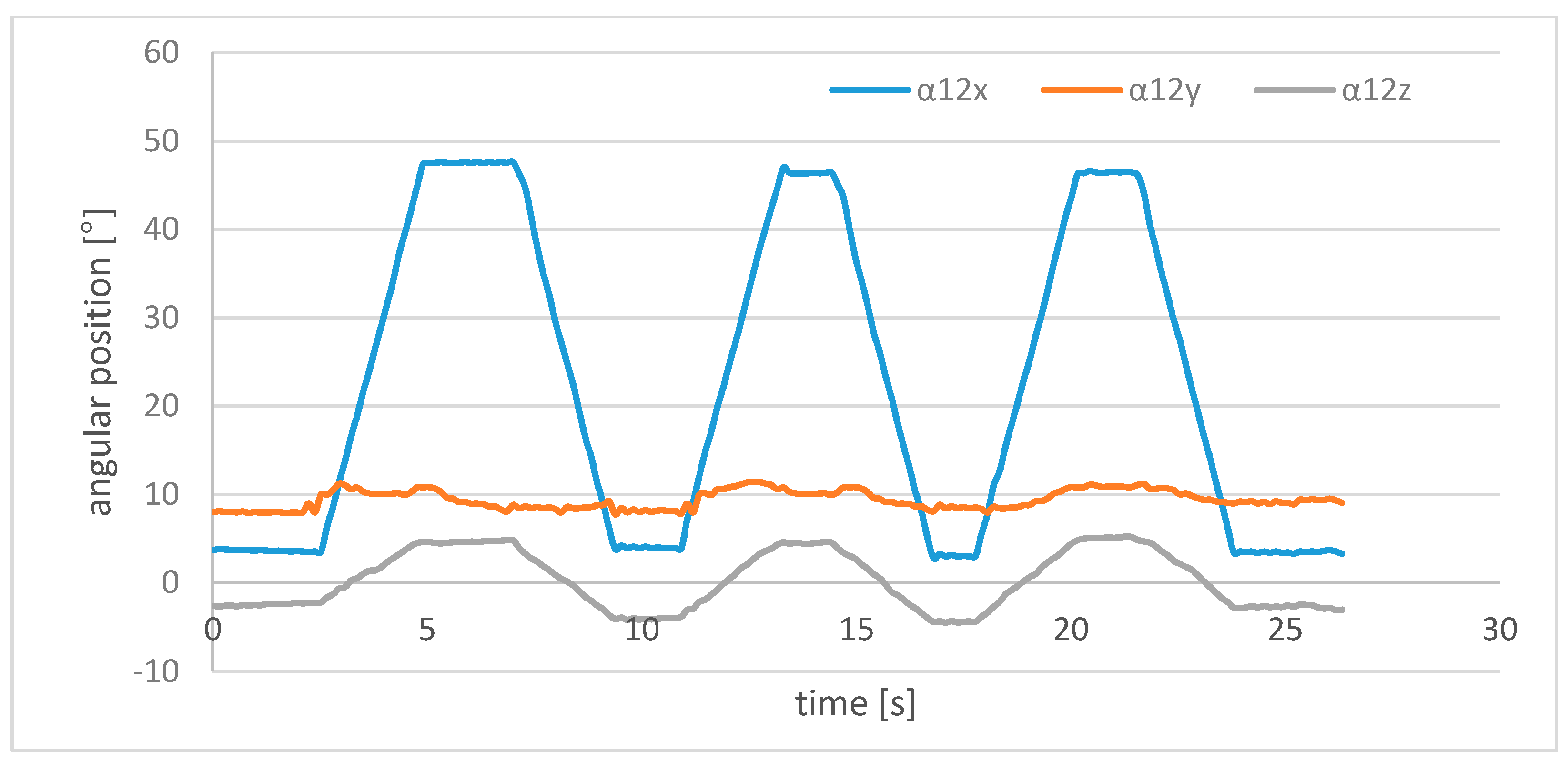
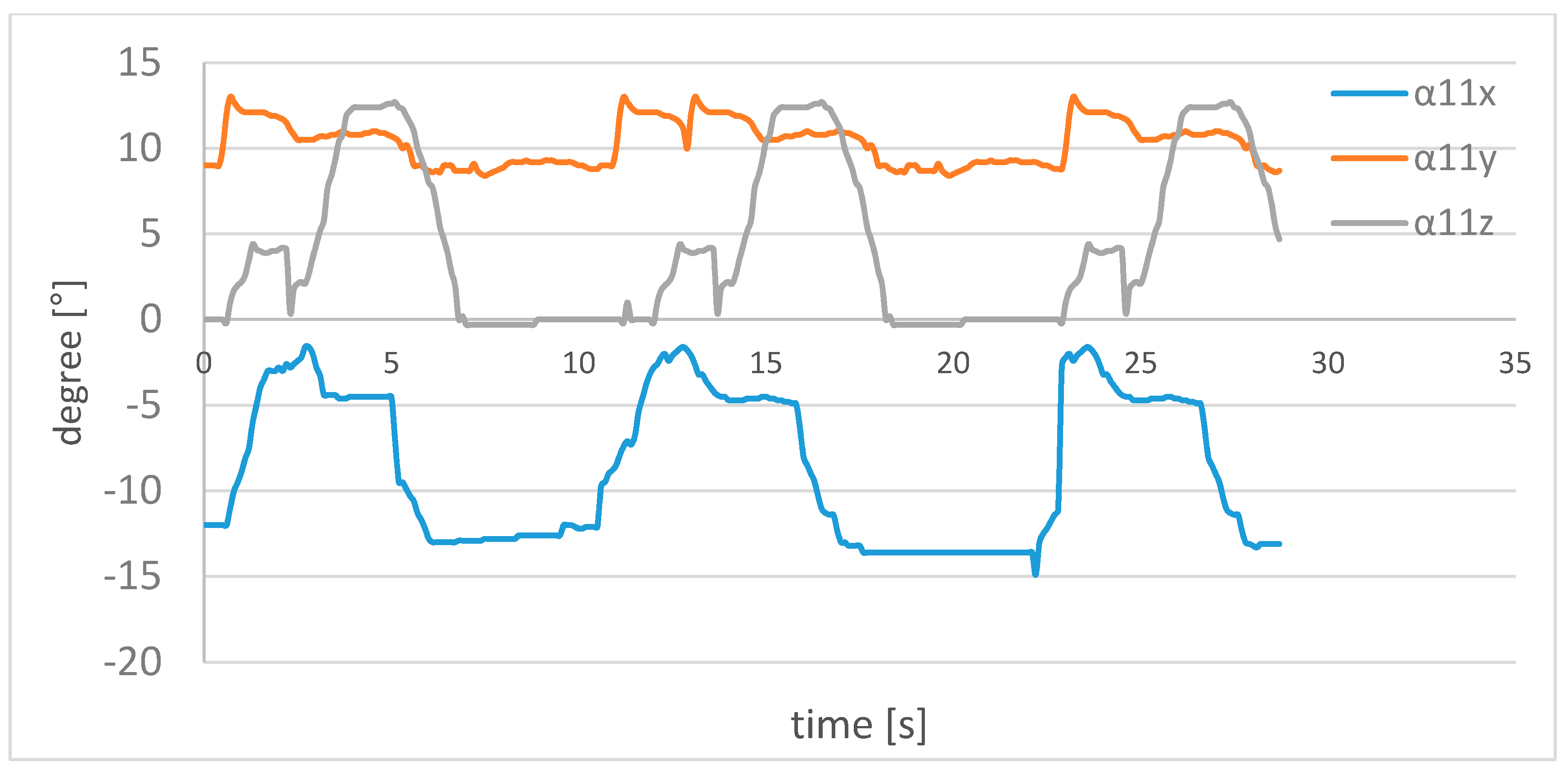
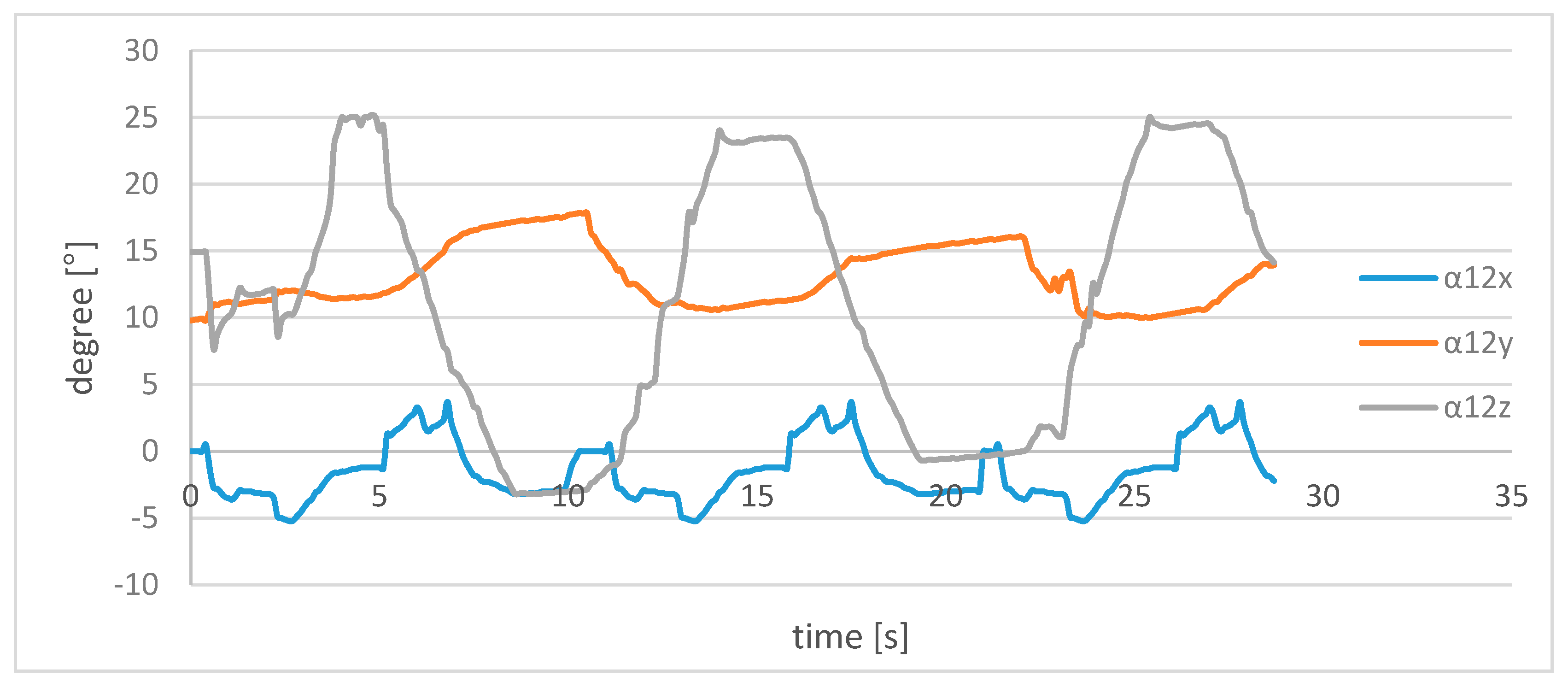
| α range [°] | 1; 25 | 10; 46 | −1; 12 | 4; 48 | 8; 11 | −4; 6 | 13,16 |
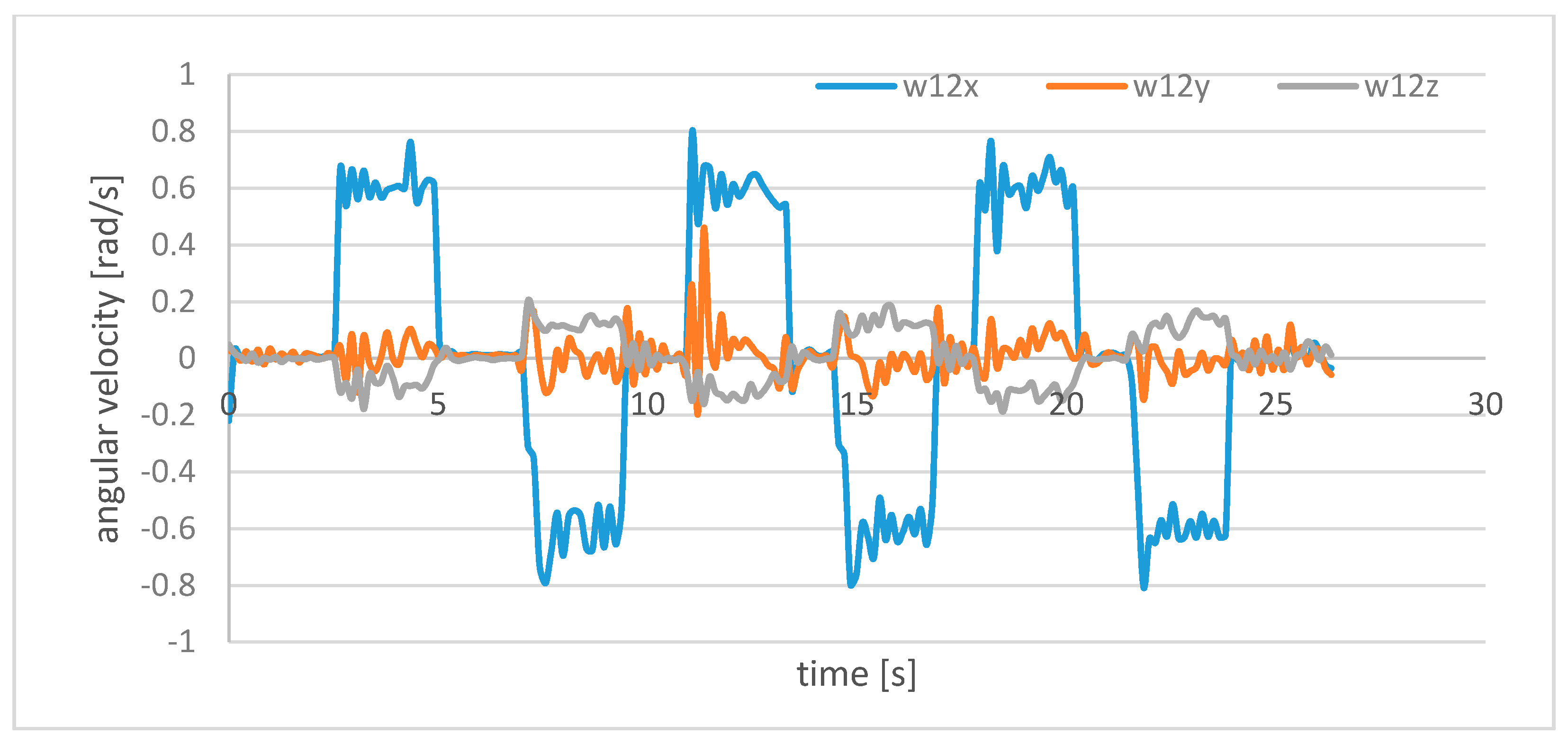
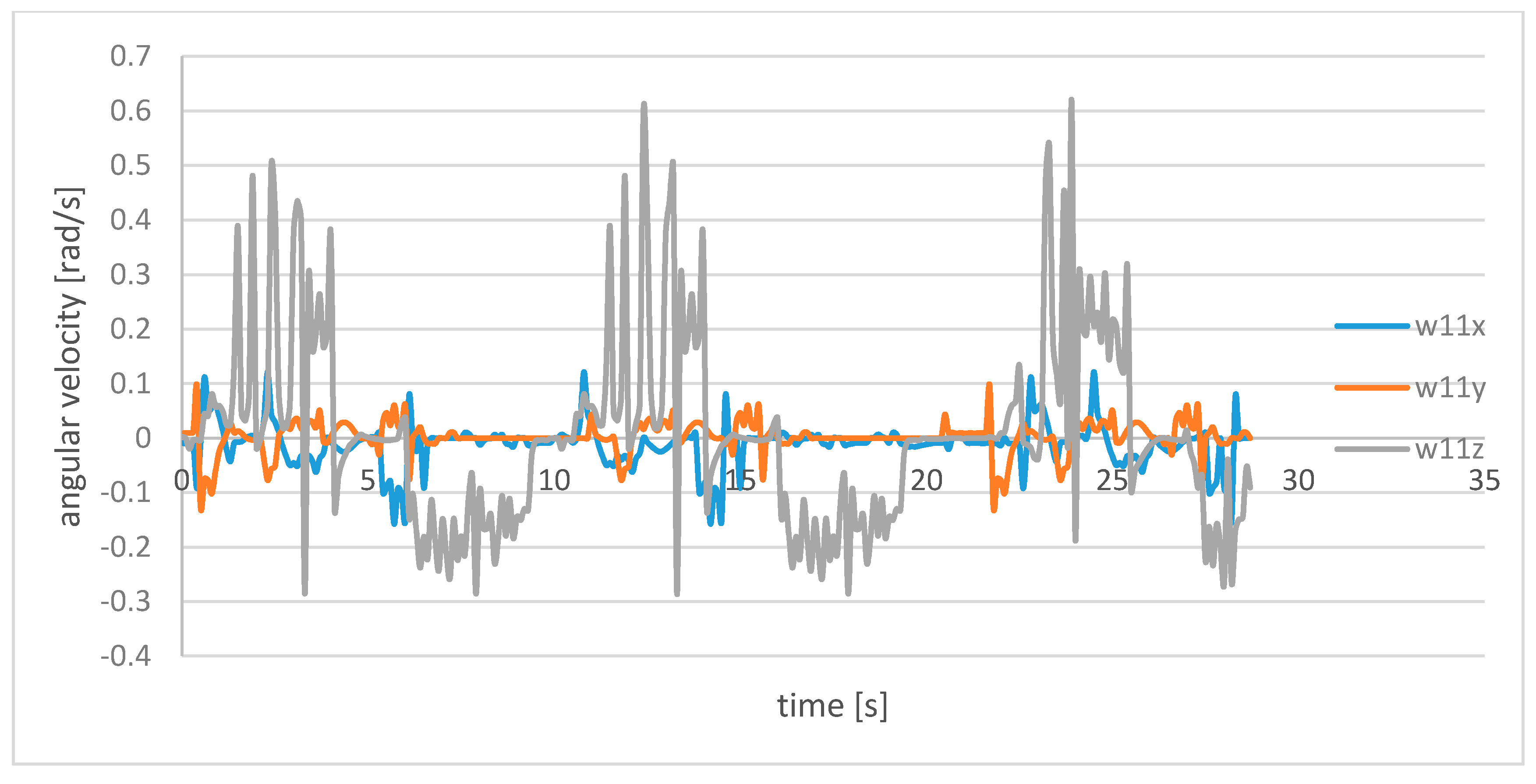
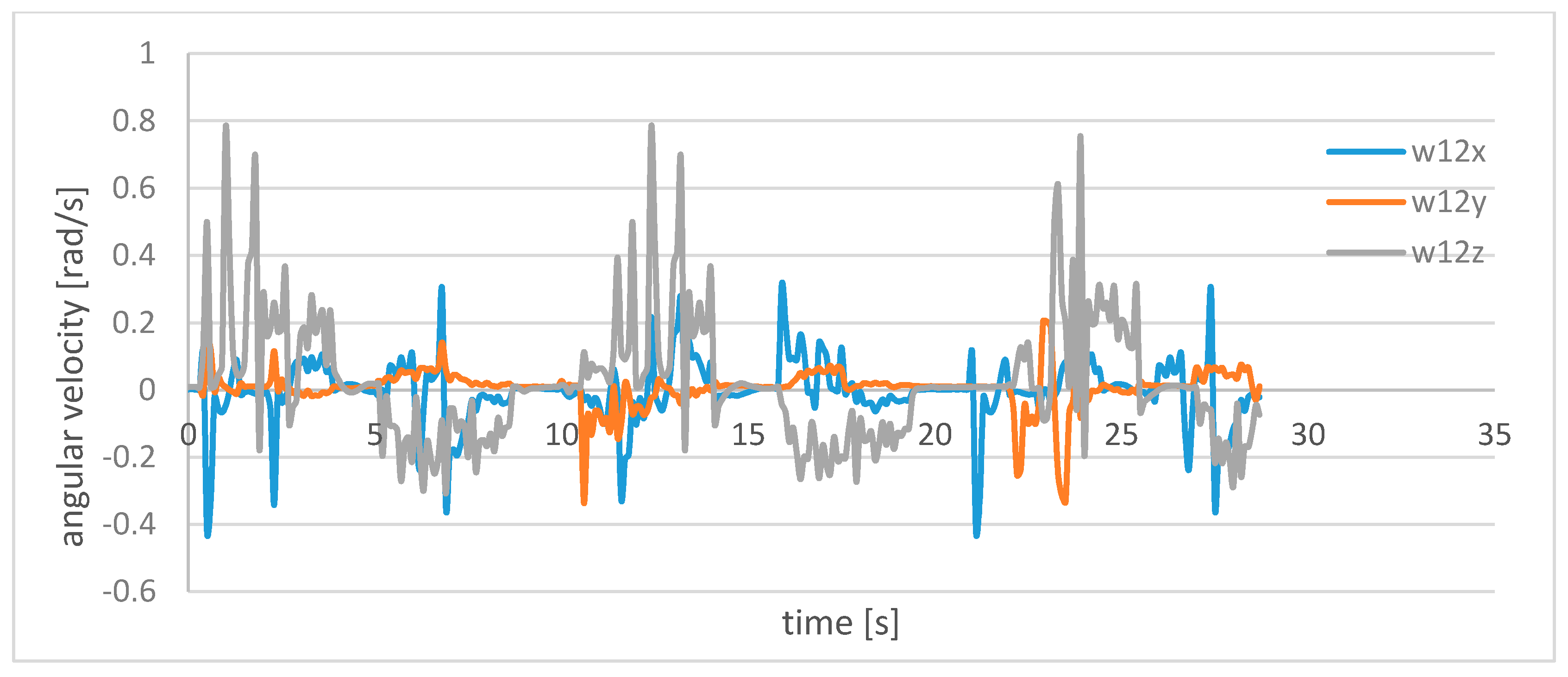
| w range [rad/s] | −0.4; 0.4 | −0.7; 0.8 | −0.2; 0.3 | −0.8; 0.8 | −0.2; 0.4 | −0.2; 0.2 | 14,17 |
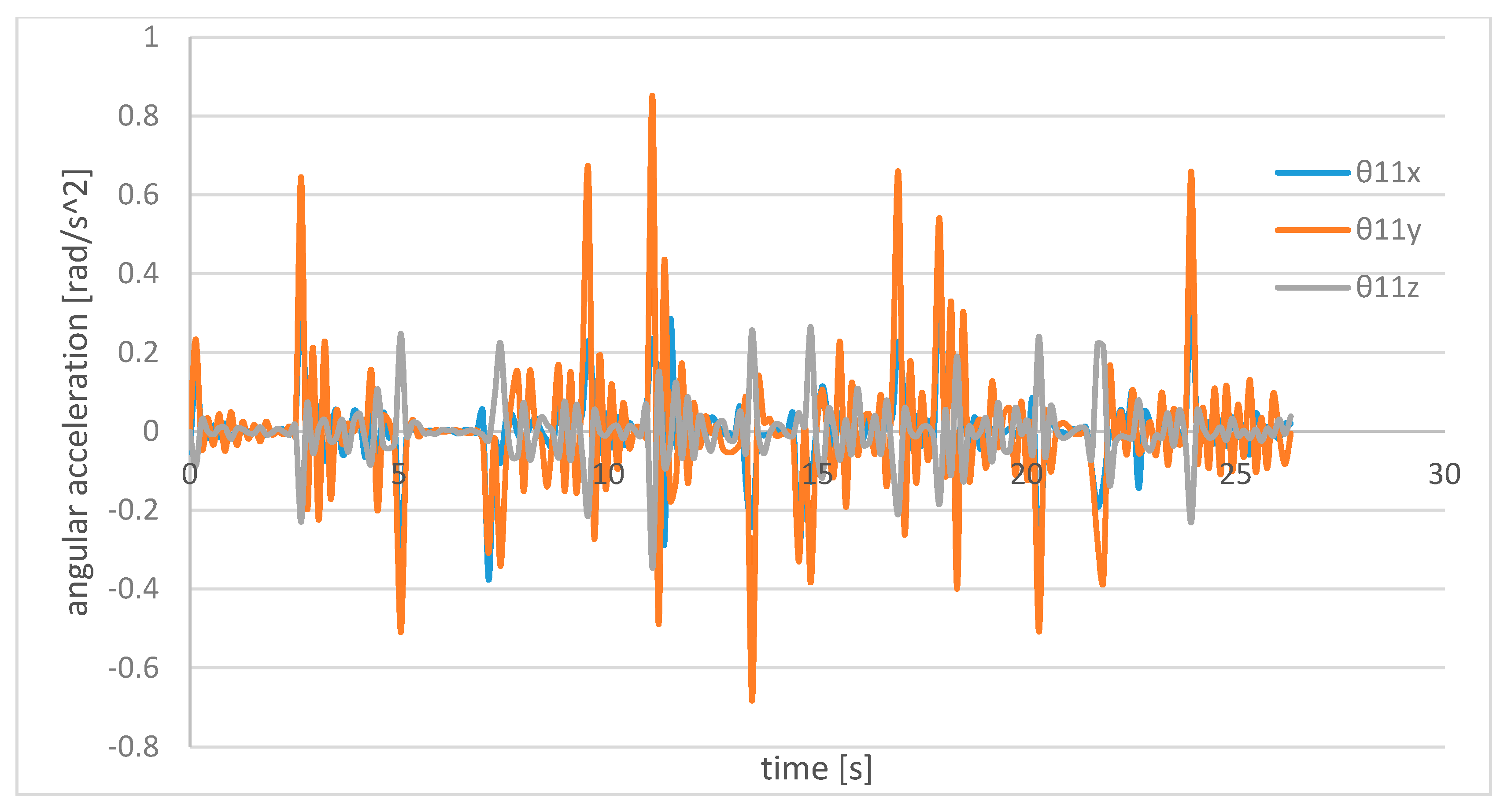
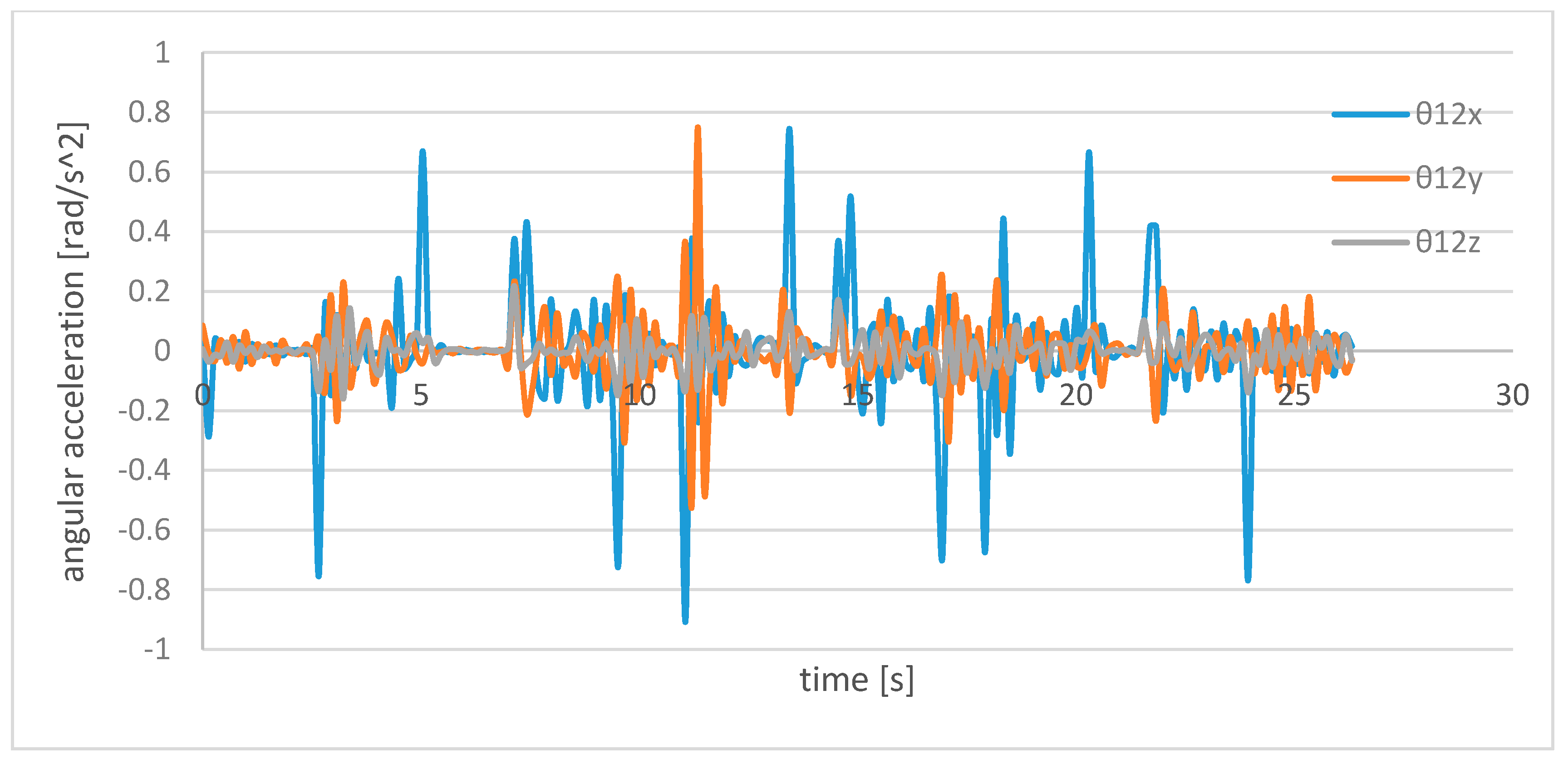
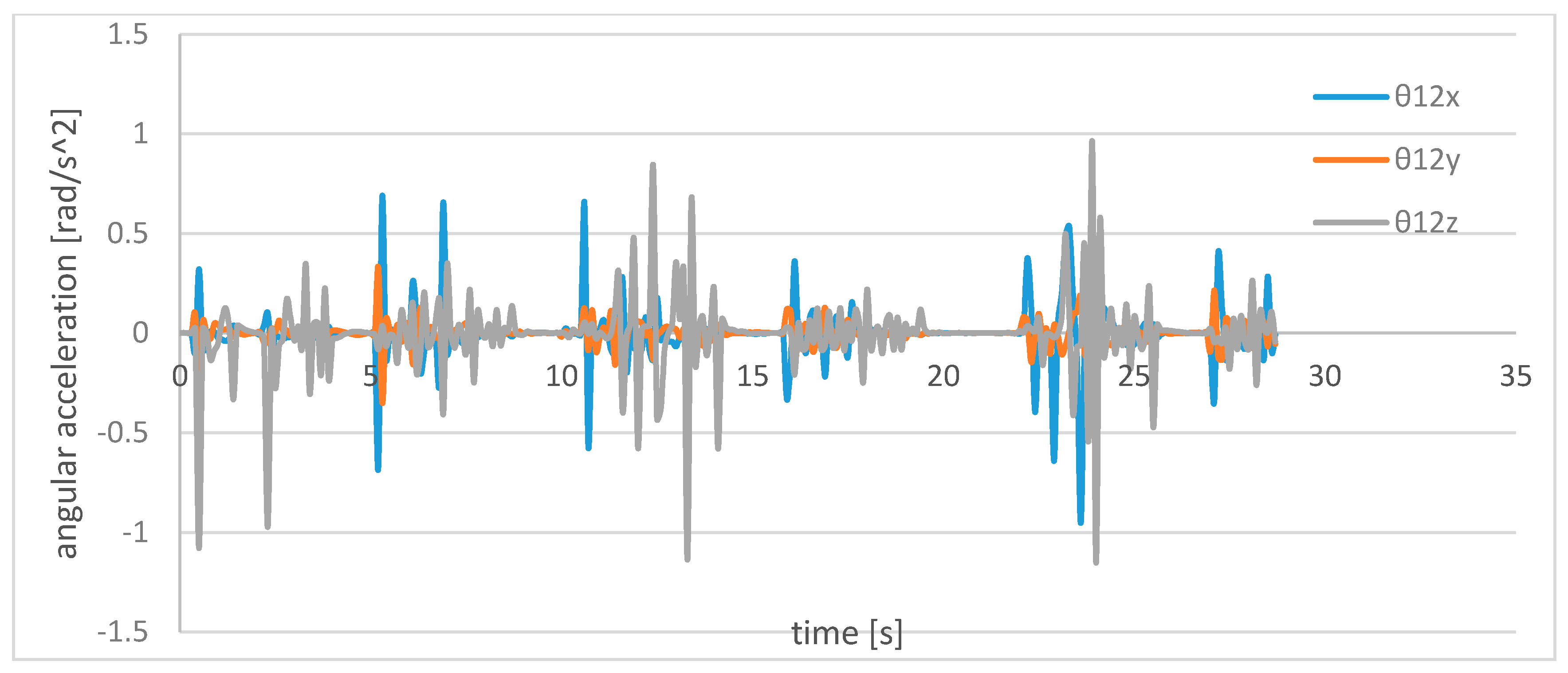
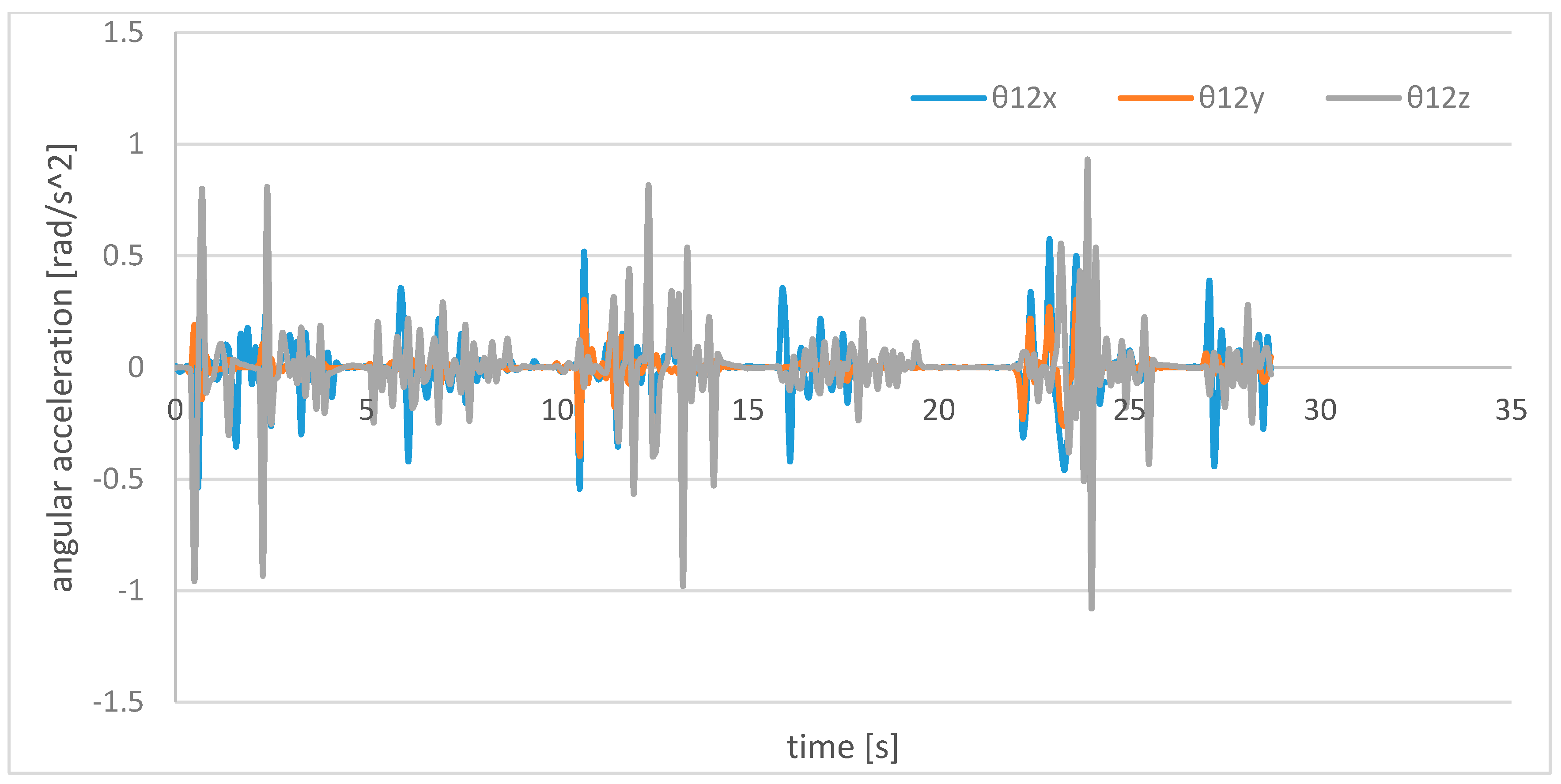
| θ range [rad/s^2] | −0.4; 0.3 | −0.7; 0.8 | −0.2; 0.2 | −0.8; 0.8 | −0.6; 0.8 | −0.2; 0.2 | 15,18 |
| Link | L11 | L12 | Ref. Fig. | ||||
|---|---|---|---|---|---|---|---|
| axis | x | y | z | x | y | z | |
| α range [°] | −15; −2 | 8; 14 | 0; 14 | −5; 4 | 10; 18 | −3; 25 | 21,24 |
| w range [rad/s] | −0.2; 0.2 | −0.1; 0.1 | −0.3; 0.6 | −0.4; 0.3 | −0.3; 0.4 | −0.3; 0.8 | 22,25 |
| θ range [rad/s^2] | −0.6; 0.6 | −0.3; 0.3 | −1.1; 1 | −0.5; 0.5 | −0.4; 0.3 | −1; 1 | 23,26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samani, F.; Ceccarelli, M. An Experimental Characterization of TORVEastro, Cable-Driven Astronaut Robot. Robotics 2021, 10, 21. https://doi.org/10.3390/robotics10010021
Samani F, Ceccarelli M. An Experimental Characterization of TORVEastro, Cable-Driven Astronaut Robot. Robotics. 2021; 10(1):21. https://doi.org/10.3390/robotics10010021
Chicago/Turabian StyleSamani, Francesco, and Marco Ceccarelli. 2021. "An Experimental Characterization of TORVEastro, Cable-Driven Astronaut Robot" Robotics 10, no. 1: 21. https://doi.org/10.3390/robotics10010021
APA StyleSamani, F., & Ceccarelli, M. (2021). An Experimental Characterization of TORVEastro, Cable-Driven Astronaut Robot. Robotics, 10(1), 21. https://doi.org/10.3390/robotics10010021