
Performance Investigation and Repeatability Assessment of a Mobile Robotic System for 3D Mapping †






Abstract
:1. Introduction
- Case 1: the acquisition device installed on a mobile robot (referred in the following as robotic mode (R)).
- Case 2: the acquisition device attached to a telescopic pole and carried manually (referred to as handheld mode (H)).
- The method is validated by comparing the point clouds obtained in both Cases 1 and 2 with a ground truth based on a previously acquired TLS survey.
- The repeatability of the mapping is assessed by performing multiple scans and evaluating the consistency of the results.
- A new experimental setup for the laser scanner installed on the mobile robot is developed to improve the point of view of the sensor during the robotic mapping. The higher point of view provides advantages in cluttered environments, limiting occlusions and data gaps in the model caused, e.g., by furniture.
2. Materials and Methods
2.1. System Setup and Sensor Characteristics
2.2. Experimental Data Acquisition and Processing
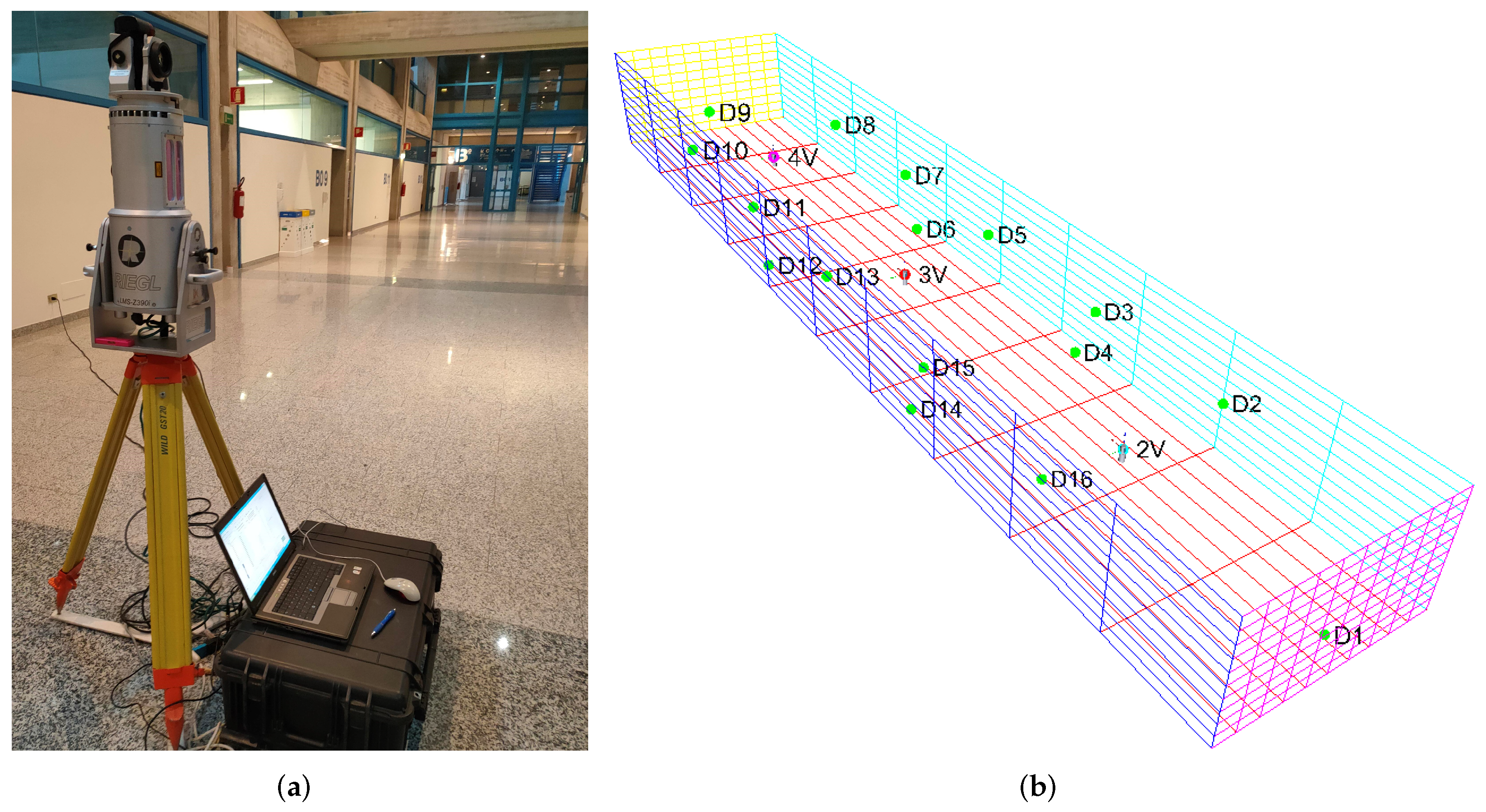
2.3. Ground-Truth Acquisition
3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gupta, T.; Li, H. Indoor mapping for smart cities—An affordable approach: Using Kinect sensor and ZED stereo camera. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation, Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- United Nations. The Sustainable Development Goals. 2015. Available online: https://sdgs.un.org/goals (accessed on 14 May 2021).
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D scan LiDAR: A literature review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Otero, R.; Lagüela, S.; Garrido, I.; Arias, P. Mobile indoor mapping technologies: A review. Autom. Constr. 2020, 120, 103399. [Google Scholar] [CrossRef]
- Nocerino, E.; Menna, F.; Remondino, F.; Toschi, I.; Rodríguez-Gonzálvez, P. Investigation of indoor and outdoor performance of two portable mobile mapping systems. In Proceedings of the Videometrics, Range Imaging, and Applications XIV, Munich, Germany, 25–29 June 2017. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Moosmann, F.; Stiller, C. Velodyne SLAM. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 393–398. [Google Scholar]
- Tucci, G.; Visintini, D.; Bonora, V.; Parisi, E.I. Examination of indoor mobile mapping systems in a diversified internal/external test field. Appl. Sci. 2018, 8, 401. [Google Scholar] [CrossRef] [Green Version]
- Di Filippo, A.; Sánchez-Aparicio, L.J.; Barba, S.; Martín-Jiménez, J.A.; Mora, R.; González Aguilera, D. Use of a wearable mobile laser system in seamless indoor 3D mapping of a complex historical site. Remote Sens. 2018, 10, 1897. [Google Scholar] [CrossRef] [Green Version]
- Di Stefano, F.; Torresani, A.; Farella, E.M.; Pierdicca, R.; Menna, F.; Remondino, F. 3D surveying of underground built heritage: Opportunities and challenges of mobile technologies. Sustainability 2021, 13, 13289. [Google Scholar] [CrossRef]
- Maset, E.; Cucchiaro, S.; Cazorzi, F.; Crosilla, F.; Fusiello, A.; Beinat, A. Investigating the performance of a handheld mobile mapping system in different outdoor scenarios. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B1-2021, 103–109. [Google Scholar] [CrossRef]
- Maset, E.; Scalera, L.; Zonta, D.; Alba, I.; Crosilla, F.; Fusiello, A. Procrustes analysis for the virtual trial assembly of large-size elements. Robot. Comput.-Integr. Manuf. 2020, 62, 101885. [Google Scholar] [CrossRef]
- Maset, E.; Magri, L.; Fusiello, A. Improving automatic reconstruction of interior walls from point cloud data. ISPRS Arch. 2019, XLII-2/W13, 849–855. [Google Scholar] [CrossRef] [Green Version]
- Cantoni, S.; Vassena, G. Fast indoor mapping to feed an indoor db for building and facility management. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 213–217. [Google Scholar] [CrossRef] [Green Version]
- Rausch, C.; Haas, C. Automated shape and pose updating of building information model elements from 3D point clouds. Autom. Constr. 2021, 124, 103561. [Google Scholar] [CrossRef]
- Yang, L.; Cheng, J.C.; Wang, Q. Semi-automated generation of parametric BIM for steel structures based on terrestrial laser scanning data. Autom. Constr. 2020, 112, 103037. [Google Scholar] [CrossRef]
- Comai, S.; Costa, S.; Ventura, S.M.; Vassena, G.; Tagliabue, L.; Simeone, D.; Bertuzzi, E.; Scurati, G.; Ferrise, F.; Ciribini, A. Indoor mobile mapping system and crowd simulation to support school reopening because of COVID-19: A case study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 44, 29–36. [Google Scholar] [CrossRef]
- Chen, J.; Cho, Y.K. Detection of damaged infrastructure on disaster sites using mobile robots. In Proceedings of the 16th International Conference on Ubiquitous Robots, Jeju, Korea, 24–27 June 2019; pp. 648–653. [Google Scholar]
- Zimroz, R.; Hutter, M.; Mistry, M.; Stefaniak, P.; Walas, K.; Wodecki, J. Why should inspection robots be used in deep underground mines? In Proceedings of the 27th International Symposium on Mine Planning and Equipment Selection—MPES 2018; Springer: Berlin/Heidelberg, Germany, 2019; pp. 497–507. [Google Scholar]
- Kim, P.; Park, J.; Cho, Y.K.; Kang, J. UAV-assisted autonomous mobile robot navigation for as-is 3D data collection and registration in cluttered environments. Autom. Constr. 2019, 106, 102918. [Google Scholar] [CrossRef]
- Shalal, N.; Low, T.; McCarthy, C.; Hancock, N. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion—Part A: Tree detection. Comput. Electron. Agric. 2015, 119, 254–266. [Google Scholar] [CrossRef]
- Ristorto, G.; Gallo, R.; Gasparetto, A.; Scalera, L.; Vidoni, R.; Mazzetto, F. A mobile laboratory for orchard health status monitoring in precision farming. Chem. Eng. Trans. 2017, 58, 661–666. [Google Scholar]
- Masuzawa, H.; Miura, J.; Oishi, S. Development of a mobile robot for harvest support in greenhouse horticulture—Person following and mapping. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 541–546. [Google Scholar]
- Weiss, U.; Biber, P. Plant detection and mapping for agricultural robots using a 3D LIDAR sensor. Robot. Auton. Syst. 2011, 59, 265–273. [Google Scholar] [CrossRef]
- Aguiar, A.S.; dos Santos, F.N.; Cunha, J.B.; Sobreira, H.; Sousa, A.J. Localization and mapping for robots in agriculture and forestry: A survey. Robotics 2020, 9, 97. [Google Scholar] [CrossRef]
- Borrmann, D.; Hess, R.; Eck, D.; Houshiar, H.; Nüchter, A.; Schilling, K. Evaluation of methods for robotic mapping of cultural heritage sites. IFAC-PapersOnLine 2015, 48, 105–110. [Google Scholar] [CrossRef]
- Calisi, D.; Cottefoglie, F.; D’Agostini, L.; Giannone, F.; Nenci, F.; Salonia, P.; Zaratti, M.; Ziparo, V.A. Robotics and virtual reality for cultural heritage digitalization and fruition. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 503–508. [Google Scholar] [CrossRef] [Green Version]
- Biber, P.; Andreasson, H.; Duckett, T.; Schilling, A. 3D modeling of indoor environments by a mobile robot with a laser scanner and panoramic camera. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 4, pp. 3430–3435. [Google Scholar]
- Kurazume, R.; Oshima, S.; Nagakura, S.; Jeong, Y.; Iwashita, Y. Automatic large-scale three dimensional modeling using cooperative multiple robots. Comput. Vis. Image Underst. 2017, 157, 25–42. [Google Scholar] [CrossRef] [Green Version]
- Adán, A.; Quintana, B.; Prieto, S.A. Autonomous mobile scanning systems for the digitization of buildings: A review. Remote Sens. 2019, 11, 306. [Google Scholar] [CrossRef] [Green Version]
- Ramezani, M.; Wang, Y.; Camurri, M.; Wisth, D.; Mattamala, M.; Fallon, M. The newer College Dataset: Handheld LiDAR, inertial and vision with ground truth. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NA, USA, 25–29 October 2020; pp. 4353–4360. [Google Scholar]
- Kim, P.; Chen, J.; Cho, Y.K. SLAM-driven robotic mapping and registration of 3D point clouds. Autom. Constr. 2018, 89, 38–48. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhu, J.; Lin, Z.; Li, Z.; Guo, R. 3D mapping of outdoor environments by scan matching and motion averaging. Neurocomputing 2020, 372, 17–32. [Google Scholar] [CrossRef]
- Bartlett, J.; Frost, C. Reliability, repeatability and reproducibility: Analysis of measurement errors in continuous variables. Ultrasound Obstet. Gynecol. 2008, 31, 466–475. [Google Scholar] [CrossRef]
- De Marco, J.; Maset, E.; Cucchiaro, S.; Beinat, A.; Cazorzi, F. Assessing repeatability and reproducibility of Structure-from-Motion Photogrammetry for 3D terrain mapping of riverbeds. Remote Sens. 2021, 13, 2572. [Google Scholar] [CrossRef]
- Maset, E.; Scalera, L.; Beinat, A.; Cazorzi, F.; Crosilla, F.; Fusiello, A.; Gasparetto, A. Preliminary comparison between handheld and mobile robotic mapping systems. In International Workshop IFToMM for Sustainable Development Goals; Springer: Berlin/Heidelberg, Germany, 2021; pp. 290–298. [Google Scholar]
- Gexcel srl. HERON Lite. 2022. Available online: https://gexcel.it/en/solutions/heron-portable-3d-mapping-system (accessed on 12 January 2022).
- Velodyne Lidar. Puck LITE. 2022. Available online: https://velodynelidar.com/products/puck-lite (accessed on 2 February 2022).
- Xsens. MTi. 2022. Available online: https://www.xsens.com/mti-product-selector (accessed on 2 February 2022).
- NEOBOTIX GmbH. NEOBOTIX MP-500. 2022. Available online: https://docs.neobotix.de/display/MP500 (accessed on 12 January 2022).
- Gexcel srl. HERON Desktop. 2022. Available online: https://gexcel.it/it/software/heron-desktop (accessed on 2 February 2022).
- Besl, P.; McKay, N. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Burgard, W. A tutorial on graph-based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- MicroSurvey. STAR*NET. 2022. Available online: https://www.microsurvey.com/products/starnet (accessed on 2 February 2022).
- RIEGL. RiSCAN PRO. 2022. Available online: http://www.riegl.com/products/software-packages/riscan-pro (accessed on 2 February 2022).
- Gexcel srl. JRC 3D Reconstructor. 2022. Available online: https://gexcel.it/en/software/reconstructor (accessed on 2 February 2022).
- CloudCompare. 2022. Available online: https://www.danielgm.net/cc/ (accessed on 2 February 2022).
- Lagüela, S.; Dorado, I.; Gesto, M.; Arias, P.; González-Aguilera, D.; Lorenzo, H. Behavior analysis of novel wearable indoor mapping system based on 3d-slam. Sensors 2018, 18, 766. [Google Scholar] [CrossRef] [Green Version]
- Sammartano, G.; Spanò, A. Point clouds by SLAM-based mobile mapping systems: Accuracy and geometric content validation in multisensor survey and stand-alone acquisition. Appl. Geomat. 2018, 10, 317–339. [Google Scholar] [CrossRef]
- Potthast, C.; Sukhatme, G.S. A probabilistic framework for next best view estimation in a cluttered environment. J. Vis. Commun. Image Represent. 2014, 25, 148–164. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Characteristic | R-1 | R-2 | R-3 | H-1 | H-2 | H-3 |
|---|---|---|---|---|---|---|
| Acquisition time | 1624 | 1651 | 16’23 | 537 | 552 | 513 |
| Trajectory length (m) | 403 | 399 | 402 | 407 | 401 | 402 |
| Points number (×) | 133.6 | 132.3 | 128.6 | 65.3 | 62.9 | 58.7 |
| C2C | R-1 | R-2 | R-3 | H-1 | H-2 | H-3 |
|---|---|---|---|---|---|---|
| Mean (cm) | 2.3 | 2.2 | 2.2 | 2.0 | 2.0 | 2.1 |
| Std. dev. (cm) | 2.5 | 2.8 | 2.9 | 2.7 | 2.7 | 3.0 |
| C2C | R-1 vs. R-2 | R-1 vs. R-3 | R-2 vs. R-3 | H-1 vs. H-2 | H-1 vs. H-3 | H-2 vs. H-3 |
|---|---|---|---|---|---|---|
| Mean (cm) | 0.7 | 0.7 | 0.7 | 0.9 | 0.9 | 0.9 |
| Std. dev. (cm) | 0.4 | 0.5 | 0.6 | 0.6 | 0.8 | 0.6 |
| Density | R-1 | R-2 | R-3 | H-1 | H-2 | H-3 |
|---|---|---|---|---|---|---|
| Mean (pts/m) | 20,300 | 21,043 | 21,000 | 16,643 | 19,255 | 16,762 |
| Std. dev. (pts/m) | 6267 | 6989 | 7685 | 8724 | 9694 | 8916 |
| Plane | R-1 | R-2 | R-3 | H-1 | H-2 | H-3 | TLS |
|---|---|---|---|---|---|---|---|
| Wall #1 (cm) | 1.9 | 2.1 | 2.2 | 3.0 | 2.7 | 2.6 | 0.3 |
| Wall #2 (cm) | 1.6 | 1.6 | 1.8 | 2.3 | 2.3 | 2.0 | 0.6 |
| Floor (cm) | 1.4 | 1.4 | 1.4 | 1.2 | 1.1 | 1.2 | 0.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maset, E.; Scalera, L.; Beinat, A.; Visintini, D.; Gasparetto, A. Performance Investigation and Repeatability Assessment of a Mobile Robotic System for 3D Mapping. Robotics 2022, 11, 54. https://doi.org/10.3390/robotics11030054
Maset E, Scalera L, Beinat A, Visintini D, Gasparetto A. Performance Investigation and Repeatability Assessment of a Mobile Robotic System for 3D Mapping. Robotics. 2022; 11(3):54. https://doi.org/10.3390/robotics11030054
Chicago/Turabian StyleMaset, Eleonora, Lorenzo Scalera, Alberto Beinat, Domenico Visintini, and Alessandro Gasparetto. 2022. "Performance Investigation and Repeatability Assessment of a Mobile Robotic System for 3D Mapping" Robotics 11, no. 3: 54. https://doi.org/10.3390/robotics11030054
APA StyleMaset, E., Scalera, L., Beinat, A., Visintini, D., & Gasparetto, A. (2022). Performance Investigation and Repeatability Assessment of a Mobile Robotic System for 3D Mapping. Robotics, 11(3), 54. https://doi.org/10.3390/robotics11030054