Dexterous Manipulation of Unknown Objects Using Virtual Contact Points



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Sequentially removing one (or more) finger contact and placing it on another point on the object surface, which is called “finger gaiting”. In this case the grasp changes in a discontinuous way (e.g., References [11,21,22,23]) and sometimes is called as “in-hand regrasping,” expression that is not frequently used in the previous case.
2. Problem Statement
3. Proposed Manipulation Strategy
| Algorithm 1: Manipulation algorithm |
 |
4. Experimental Validation
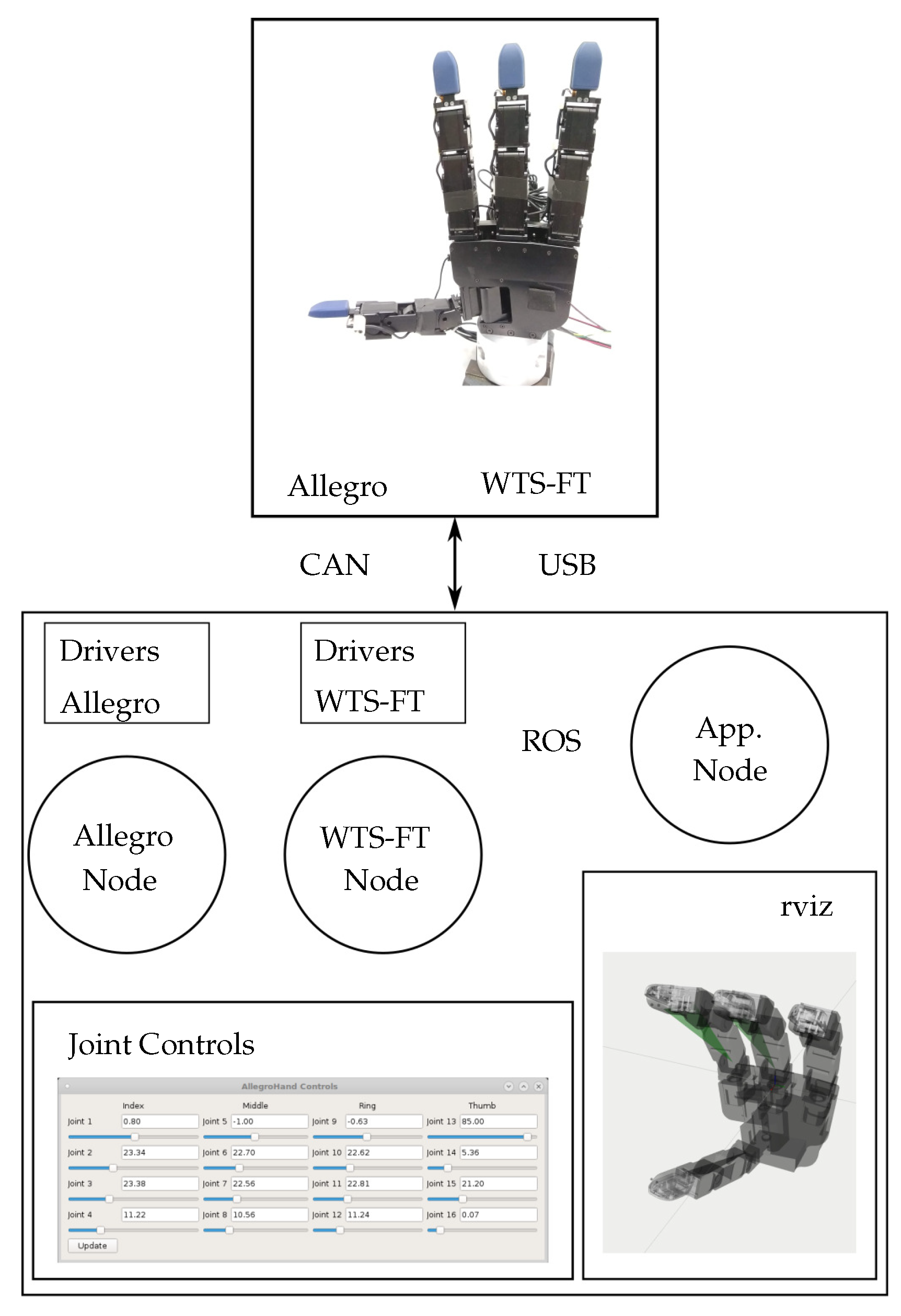
4.1. Hardware Set-up
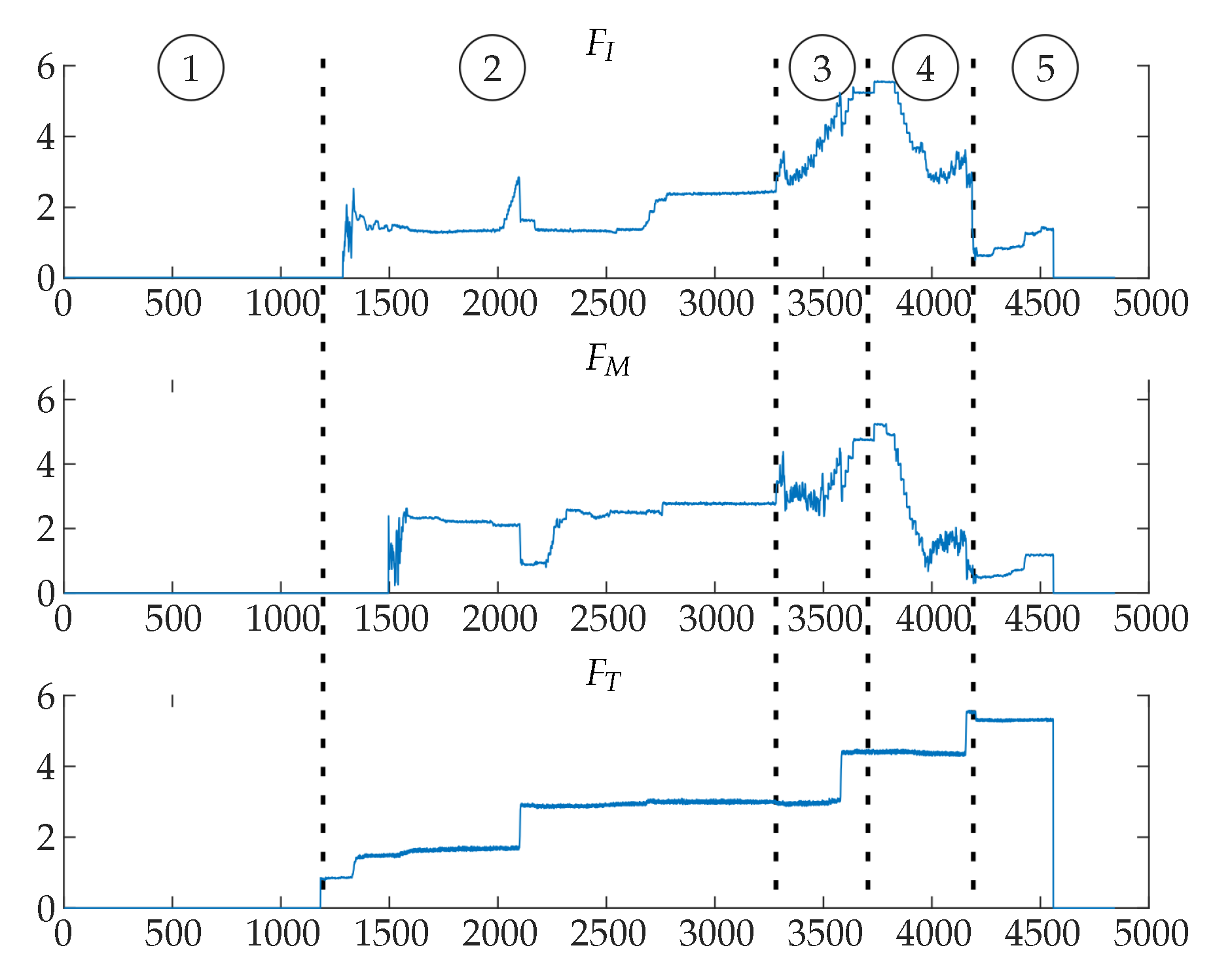
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Okamura, A.M.; Smaby, N.; Cutkosky, M.R. An overview of dexterous manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 255–262. [Google Scholar] [CrossRef]
- Bicchi, A. Hands for Dextrous Manipulation and Powerful Grasping: A Difficult Road Towards Simplicity. IEEE Trans. Robot. Autom. 2000, 16, 652–662. [Google Scholar] [CrossRef]
- Butterfass, J.; Fischer, M.; Grebenstein, M.; Haidacher, S.; Hirzinger, G. Design and experiences with DLR hand II. In Proceedings of the World Automation Congress, Seville, Spain, 28 June–1 July 2004; Volume 15, pp. 105–110. [Google Scholar]
- Grosch, P.; Suárez, R. Dexterous Robotic Hand MA-I, Sofware and Hardware Architecture. In Proceedings of the Intelligent Manipulation and Grasping International Conference, IMG’04, Genoa, Italy, 1–2 July 2004; pp. 91–96. [Google Scholar]
- Shadow Robot Company. Shadow Dexterous Hand. 2015. Available online: http://www.shadowrobot.com (accessed on 10 July 2019).
- SCHUNK GmbH & Co. KG. Shunck Dexterous Hand—SDH2. 2011. Available online: http://www.schunk.com (accessed on 10 July 2019).
- Bridgwater, L.; Ihrke, C.A.; Diftler, M.; Abdallah, M.; Radford, N.; Rogers, J.; Yayathi, S.; Askew, R.S.; Linn, D.M. The Robonaut 2 hand—designed to do work with tools. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3425–3430. [Google Scholar] [CrossRef]
- Sadun, A.S.; Jalani, J.; Jamil, F. Grasping analysis for a 3-Finger Adaptive Robot Gripper. In Proceedings of the IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Ipoh, Malaysia, 25–27 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Allegro Robotic Hand—Wonik Robotics. 2018. Available online: http://wonikrobotics.com/Allegro-Hand.htm (accessed on 10 July 2019).
- Shimoga, K.B. Robot grasp synthesis algorithms: A survey. Int. J. Robot. Res. 1996, 15, 230–266. [Google Scholar] [CrossRef]
- Han, L.; Trinkle, J.C. Dextrous manipulation by rolling and finger gaiting. In Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 20–20 May 1998; Volume 1, pp. 730–735. [Google Scholar] [CrossRef]
- Dafle, N.C.; Rodriguez, A.; Paolini, R.; Tang, B.; Srinivasa, S.S.; Erdmann, M.; Mason, M.T.; Lundberg, I.; Staab, H.; Fuhlbrigge, T. Extrinsic dexterity: In-hand manipulation with external forces. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 1578–1585. [Google Scholar] [CrossRef]
- Funabashi, S.; Schmitz, A.; Sato, T.; Somlor, S.; Sugano, S. Robust in-hand manipulation of variously sized and shaped objects. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 257–263. [Google Scholar] [CrossRef]
- Liarokapis, M.; Dollar, A.M. Deriving dexterous, in-hand manipulation primitives for adaptive robot hands. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 1951–1958. [Google Scholar] [CrossRef]
- Ho, V.A.; Nagatani, T.; Noda, A.; Hirai, S. What can be inferred from a tactile arrayed sensor in autonomous in-hand manipulation? In Proceedings of the IEEE International Conference on Automation Science and Engineering, Seoul, Korea, 20–24 August 2012; pp. 461–468. [Google Scholar] [CrossRef]
- Shi, J.; Woodruff, J.Z.; Umbanhowar, P.B.; Lynch, K.M. Dynamic In-Hand Sliding Manipulation. IEEE Trans. Robot. 2017, 33, 778–795. [Google Scholar] [CrossRef]
- Bicchi, A.; Marigo, A.; Prattichizzo, D. Dexterity through rolling: Manipulation of unknown objects. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 2, pp. 1583–1588. [Google Scholar] [CrossRef]
- Montaño, A.; Suárez, R. Unknown object manipulation based on tactile information. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 5642–5647. [Google Scholar] [CrossRef]
- Van Hoof, H.; Hermans, T.; Neumann, G.; Peters, J. Learning robot in-hand manipulation with tactile features. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 121–127. [Google Scholar] [CrossRef]
- Shaw-Cortez, W.; Oetomo, D.; Manzie, C.; Choong, P. Tactile-Based Blind Grasping: A Discrete-Time Object Manipulation Controller for Robotic Hands. IEEE Robot. Autom. Lett. 2018, 3, 1064–1071. [Google Scholar] [CrossRef]
- Hong, J.; Lafferriere, G.; Mishra, B.; Tan, X. Fine manipulation with multifinger hands. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 1568–1573. [Google Scholar] [CrossRef]
- Goodwine, B.; Burdick, J.W. Stratified motion planning with application to robotic finger gaiting. IFAC Proc. Vol. 1999, 32, 201–206. [Google Scholar] [CrossRef]
- Goodwine, B.; Burdick, J.W. Motion planning for kinematic stratified systems with application to quasi-static legged locomotion and finger gaiting. IEEE Trans. Robot. Autom. 2002, 18, 209–222. [Google Scholar] [CrossRef] [Green Version]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Nadon, F.; Valencia, A.; Payeur, P. Multi-Modal Sensing and Robotic Manipulation of Non-Rigid Objects: A Survey. Robotics 2018, 7, 74. [Google Scholar] [CrossRef]
- Montaño, A.; Suárez, R. Object Shape Reconstruction Based on the Object Manipulation. In Proceedings of the 16th International Conference on Advanced Robotics (ICAR 2013), Montevideo, Uruguay, 25–29 November 2013. [Google Scholar] [CrossRef]
- Chebotar, Y.; Kroemer, O.; Peters, J. Learning robot tactile sensing for object manipulation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3368–3375. [Google Scholar] [CrossRef]
- Kaboli, M.; De La Rosa, A.T.; Walker, R.; Cheng, G. In-hand object recognition via texture properties with robotic hands, artificial skin, and novel tactile descriptors. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 1155–1160. [Google Scholar] [CrossRef]
- Funabashi, S.; Morikuni, S.; Geier, A.; Schmitz, A.; Ogasa, S.; Tomo, T.P.; Somlor, S.; Sugano, S. Object Recognition Through Active Sensing Using a Multi-Fingered Robot Hand with 3D Tactile Sensors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 2589–2595. [Google Scholar] [CrossRef]
- Montaño, A.; Suárez, R. Manipulation of Unknown Objects to Improve the Grasp Quality Using Tactile Information. Sensors 2018, 18, 1412. [Google Scholar] [CrossRef] [PubMed]
- Shirafuji, S.; Hosoda, K. Detection and prevention of slip using sensors with different properties embedded in elastic artificial skin on the basis of previous experience. Robot. Auton. Syst. 2014, 62, 46–52. [Google Scholar] [CrossRef]
- Su, Z.; Hausman, K.; Chebotar, Y.; Molchanov, A.; Loeb, G.E.; Sukhatme, G.S.; Schaal, S. Force estimation and slip detection/classification for grip control using a biomimetic tactile sensor. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 297–303. [Google Scholar] [CrossRef]
- Kaboli, M.; Yao, K.; Cheng, G. Tactile-based manipulation of deformable objects with dynamic center of mass. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Cancun, Mexico, 15–17 November 2016. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Rojas, N.; Lepora, N.F. Model-Free Precise in-Hand Manipulation with a 3D-Printed Tactile Gripper. IEEE Robot. Autom. Lett. 2017, 2, 2056–2063. [Google Scholar] [CrossRef] [Green Version]
- Palli, G.; Pirozzi, S. A Tactile-Based Wire Manipulation System for Manufacturing Applications. Robotics 2019, 8, 46. [Google Scholar] [CrossRef]
- Felip, J.; Bernabé, J.; Morales, A. Contact-based blind grasping of unknown objects. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, 29 November–1 December 2012; pp. 396–401. [Google Scholar] [CrossRef]
- Li, Q.; Haschke, R.; Ritter, H. A visuo-tactile control framework for manipulation and exploration of unknown objects. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 610–615. [Google Scholar] [CrossRef]
- Agriomallos, I.; Doltsinis, S.; Mitsioni, I.; Doulgeri, Z. Slippage Detection Generalizing to Grasping of Unknown Objects Using Machine Learning With Novel Features. IEEE Robot. Autom. Lett. 2018, 3, 942–948. [Google Scholar] [CrossRef]
- Steffen, J.; Haschke, R.; Ritter, H. Experience-based and tactile-driven dynamic grasp control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2938–2943. [Google Scholar] [CrossRef]
- Montaño, A.; Suárez, R. Manipulación diestra de objetos desconocidos usando puntos de contacto virtuales. In Proceedings of the Jornadas Nacionales de Robótica (Spanish National Robotics Conference) (JNR19), Alicante, Spain, 13–14 June 2019; pp. 221–228. [Google Scholar]
- Montaño, A.; Suárez, R. Model-free in-hand manipulation based on the commanded virtual contact points. In Proceedings of the 24nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2019), Zaragoza, Spain, 10–13 September 2019; pp. 586–592. [Google Scholar]
- Bicchi, A. On the Closure Properties of Robotic Grasping. Int. J. Robot. Res. 1995, 14, 319–334. [Google Scholar] [CrossRef]
- Rosales, C.; Suárez, R.; Gabiccini, M.; Bicchi, A. On the synthesis of feasible and prehensile robotic grasps. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 550–556. [Google Scholar] [CrossRef]
- Feix, T.; Romero, J.; Schmiedmayer, H.; Dollar, A.M.; Kragic, D. The GRASP Taxonomy of Human Grasp Types. IEEE Trans.-Hum.-Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- WTS-FT—Weiss Robotics GmbH & Co. KG. 2018. Available online: https://www.weiss-robotics.com/ (accessed on 10 July 2019).
- Salisbury, J.K.; Roth, B. Kinematic and Force Analysis of Articulated Mechanical Hands. J. Mech. Transm. Autom. Des. 1983, 105, 35. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation— Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]




















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montaño, A.; Suárez, R. Dexterous Manipulation of Unknown Objects Using Virtual Contact Points. Robotics 2019, 8, 86. https://doi.org/10.3390/robotics8040086
Montaño A, Suárez R. Dexterous Manipulation of Unknown Objects Using Virtual Contact Points. Robotics. 2019; 8(4):86. https://doi.org/10.3390/robotics8040086
Chicago/Turabian StyleMontaño, Andrés, and Raúl Suárez. 2019. "Dexterous Manipulation of Unknown Objects Using Virtual Contact Points" Robotics 8, no. 4: 86. https://doi.org/10.3390/robotics8040086
APA StyleMontaño, A., & Suárez, R. (2019). Dexterous Manipulation of Unknown Objects Using Virtual Contact Points. Robotics, 8(4), 86. https://doi.org/10.3390/robotics8040086