1. Introduction
With the development of location-based services, digital road maps are increasingly needed, making road network extraction (RNE) an active research topic. Especially in dense metropolitan cities, people frequently access navigation, route planning, and real-time traffic services, increasing the need for accurate and up-to-date digital road maps. Compared to the time-consuming and labor-intensive conventional map survey, various RNE methods were developed based on remote sensing (RS) images [
1,
2], GPS trajectory [
3,
4], and light detection and ranging (LiDAR) point-cloud data [
5], since the 1970s. These semi-automatic and automatic algorithms not only lower the cost but also shorten the time of producing and updating road maps. However, due to the inherent drawbacks of the input data, automatically generating high-quality road maps remains challenging [
1,
3].
Among the existing methods, extracting road networks from RS images is rather mature, and various methods were developed, such as classification-based [
6], mathematic morphology [
7], road tracking [
8,
9,
10], and active contour [
11]. However, these methods are susceptible to the occlusion and shadow in RS images, therefore discontinuous road segments are easy to appear. At present, semi-automatic methods, which require human input, generally perform better than automatic methods.
Road extraction from GPS trajectory data started in 1990; since then, it underwent two stages—map augmentation and map generation. Map augmentation requires an existing map as prior information; conversely, map generation constructs a road map with a topological structure from an empty map. Based on the widely deployed GPS sensors, algorithms can use the collective mobility pattern behind trajectory data to extract semantic information, such as turning restrictions and obtaining GPS trajectory data [
12], which is much cheaper compared to RS images or LiDAR data. Given the volume of GPS trajectory data, most of these methods are automatic.
Existing GPS trajectory-based methods can be roughly categorized as follows—clustering-based [
13,
14,
15], kernel density estimation (KDE) [
16,
17,
18], and incremental track insertion [
19,
20]. These methods face challenges caused by (1) high GPS noise, (2) low frequency, and (3) multi-level disparity problems, which are ubiquitous among easily accessed GPS trajectory data. However, high-quality trajectory data are hard to obtain and covers fewer roads.
To overcome these issues, some methods adopt an intersection-first approach in constructing road maps [
14,
18]. As intersections are defined as the convergence of three or more road branches, they possess many features that can be detected with a designed algorithm. Detected intersections can serve as valuable information for identifying the road segments connecting them. There has been a recent surge in road intersection detection methods [
18,
21], which provide a better foundation for this approach. However, few GPS trajectory data-based methods can fully use known intersections, whereas RS-images-based road tracking is mostly driven by points like intersection-centers falling within the region of the road surface.
Therefore, we propose a GPS trajectory data-based road-tracking algorithm, including an active contour-based road centerline refinement algorithm, to extract smoothed and interconnected road centerlines from low-frequency trajectories. By adopting an automatic seeding technique, this map generation method is automatic and thus capable of handling massive trajectory data. The major contributions of our method include.
(1) We enrich the intersection-first approach in extracting road network from GPS trajectory data, making road tracking an available tool to process low-frequency trajectories, which can make better use of known intersections.
(2) We propose a template-matching-based seeding algorithm to automatically provide starting points for the road-tracking algorithm, using the density information of GPS points. To overcome the disparity problem between the heat zone of intersection region and road branches, a circular sampling approach is introduced.
(3) We propose a template-matching-based road direction extraction algorithm to perform correction when tracking road centerlines, which adapts the road-tracking algorithm to GPS trajectory data. To avoid the high GPS noise problem, the real-time correction is simple but robust.
(4) We propose an active contour-based road centerline refinement algorithm to conduct further correction of extracted road centerlines. We include road orientation restrictions in the active contour model to make better use of intersections. The extended post-processing stage makes use of geometric properties of roads, providing a general solution to zig-zag roads.
Our paper is organized as follows.
Section 2 reviews the related work on extracting road networks from GPS trajectory data and RS images.
Section 3 describes the proposed method for tracking road centerlines.
Section 4 presents a set of experimental results and analyses. Finally,
Section 5 discusses the conclusions.
2. Related Work
Since the input data are heterogenous, road network extraction methods based on GPS trajectory data are very different from methods based on RS images. Typically, the output road map is represented by a simple graph , where is a set of nodes representing the terminal points of roads, and is a set of edges denoting roads.
First, we introduce the GPS trajectory data-based method. As its input, GPS trajectory data consist of positions of a group of mobile targets across a span of time, sometimes including speed and heading direction. Existing GPS trajectory-based methods can be roughly divided into three categories—(1) clustering-based, (2) KDE, and (3) incremental track insertion.
Clustering-based methods first extract the basic node or edge elements of a road map using a clustering algorithm such as K-means. Then, the road map is constructed by connecting these extracted elements. Edelkamp and Schrödl [
13] first extracted a set of seed points spread along the road centerlines, by employing the K-means algorithm to cluster the input GPS points. Then, the adjacent extracted points are connected, based on the connectivity of the trajectories. Karagiorgou [
14] first extracted road intersections by employing an agglomerate clustering algorithm to the turn-points, which were defined as where the heading direction changed dramatically. Chen [
15] first extracted road segments by employing a graph-based clustering algorithm to a sampling set of input points; then, the intersections were detected by training a support vector machine (SVM) classifier based on their proposed
traj-SIFT feature. In conclusion, clustering-based methods generally use the trajectory motion information and therefore suffer more loss from low frequencies.
KDE methods begin with transforming GPS points into a density map through a kernel density estimator, with Gaussian kernel. In most cases, this process occurs in conjunction with discretizing the plane space into the grid of pixels; therefore, image-processing algorithms can be applied to that density map regarding it as a gray-scale image. Biagioni and Eriksson [
16] applied an image thinning algorithm on a binarized density map to produce a set of road skeletons using various binary thresholds. These skeletons are merged into a gray-scale skeleton, where an edge’s confidence of being an actual road is represented by its gray scale. Wang [
17] proposed a Morse-theory-based road centerlines extraction method, which can capture both heavily- and sparsely-sampled roads with respect to local density. Both methods can produce road maps with different levels of coverage by tuning the parameters and adopting a post-processing approach to better remove the spurious roads. In conclusion, KDE methods are robust to low frequency, but tend to generate zig-zag roads and spurious roads, which requires an effective map refinement algorithm as post-processing.
Incremental track insertion methods construct road maps by incrementally inserting trajectories into an existing map with the help of a map-matching algorithm. Cao and Krumm [
18] first grouped similar input trajectories by simulating the physical attraction between them, then incrementally inserted every trajectory by checking whether its node should merge with an existing graph node. Ahmed and Wenk [
19] employed Fréchet distance, allowing a trajectory to be partially matched to the map. Different from the first two categories, incremental track insertion methods support online updating, but require high-quality input trajectory data.
Two of the main challenges in extracting road networks from GPS trajectory data are the low frequency and the multi-level disparity of trajectory data; both are ubiquitous among the feasible trajectory data. First, low sampling rate (average sampling interval over 20 s) greatly increases the uncertainty of trajectory data, posing a serious limitation to clustering-based and incremental track insertion methods. Second, the disparity impacts different levels of the extracted road network. At the road level, the staying points of trajectories lead to abnormal local heat zone and distorted road segments. At the network level, the sheer traffic volume difference between different roads makes algorithm tend to mistake roads being travelled by very few trajectories as spurious roads. Finding a global threshold to separate false clusters or roads from correct ones is infeasible.
To address these challenges, researchers are increasingly focusing on the intersection-first approach. Following this approach, road network extraction is divided into two steps—road intersection detection and intersection-based map construction. The difficulty in each step is reduced by adopting a divide-and-conquer strategy. Karagiorgou [
14] first proposed a turn-points clustering-based road intersection detection method; Deng [
21] introduced a local
statistic in clustering-based detection; Zhang [
18] proposed a KDE-based detection method, considering the intersection’s heat zone feature. The goal of intersection detection is to achieve both good coverage and precision, under the low-frequency input data.
However, in map construction, most of the existing GPS trajectory-data-based methods only use the intersection’s position; information such as orientations of its connected roads are neglected. Therefore, we combined suitable RS images-based road network extraction methods with this intersection-first approach to more effectively use the known intersections. Here, we focused on briefly introducing the road tracking and active contour methods; both accept a set of seed points as the input, and present roads with a similar parameter model.
Road tracking methods trace the road centerlines by repeating two key steps—prediction and correction. Until a stopping criterion is satisfied, the road tracker traces a single road starting from an initial seed point, which is provided manually or by an automatic seeding algorithm. At the prediction step, an algorithm predicts the next point most likely on the road centerline given the current state of the road tracker. At the correction step, the prediction is corrected by considering its nearby image information, then the state of the road tracker is also updated. Vosselman [
8] applied Kalman filter to model the tracking process as a linear dynamic system, and a least squares profile matching was chosen to provide measurement input to the Kalman filter at the correction step. Movaghati [
10] combined the extended Kalman filter (EKF) with a particle filter (PF) to find potential new road branches after the road tracker reached its stopping criterion. Road tracking methods are generally sensitive to initial seed points, and face challenge in overcoming intersections, abrupt changes in road direction, and obstructions during the tracing process.
Last, we introduce the active contour method—it defines an energy function on a deformable line, which recursively fits a deformable line to a contour or centerline of a road in the direction of minimal energy, starting from an initialization position. This model was first proposed by Kass [
22]; also known as snake, its energy function consists of both internal and image forces. Internal force (elasticity and stiffness) models the geometric features of a road, whereas image force (intensity gradient) represents certain features of interest in the image. Fua and Leclerc [
23] proposed the ribbon snakes model to include a width parameter in the image force. By tuning the ratio between internal force and image force, active contour methods can avoid the overfitting problem when extracting roads from an image, which often yields zig-zag roads. As a result, it can also be used as a geometric refinement algorithm for road networks, given background image information.
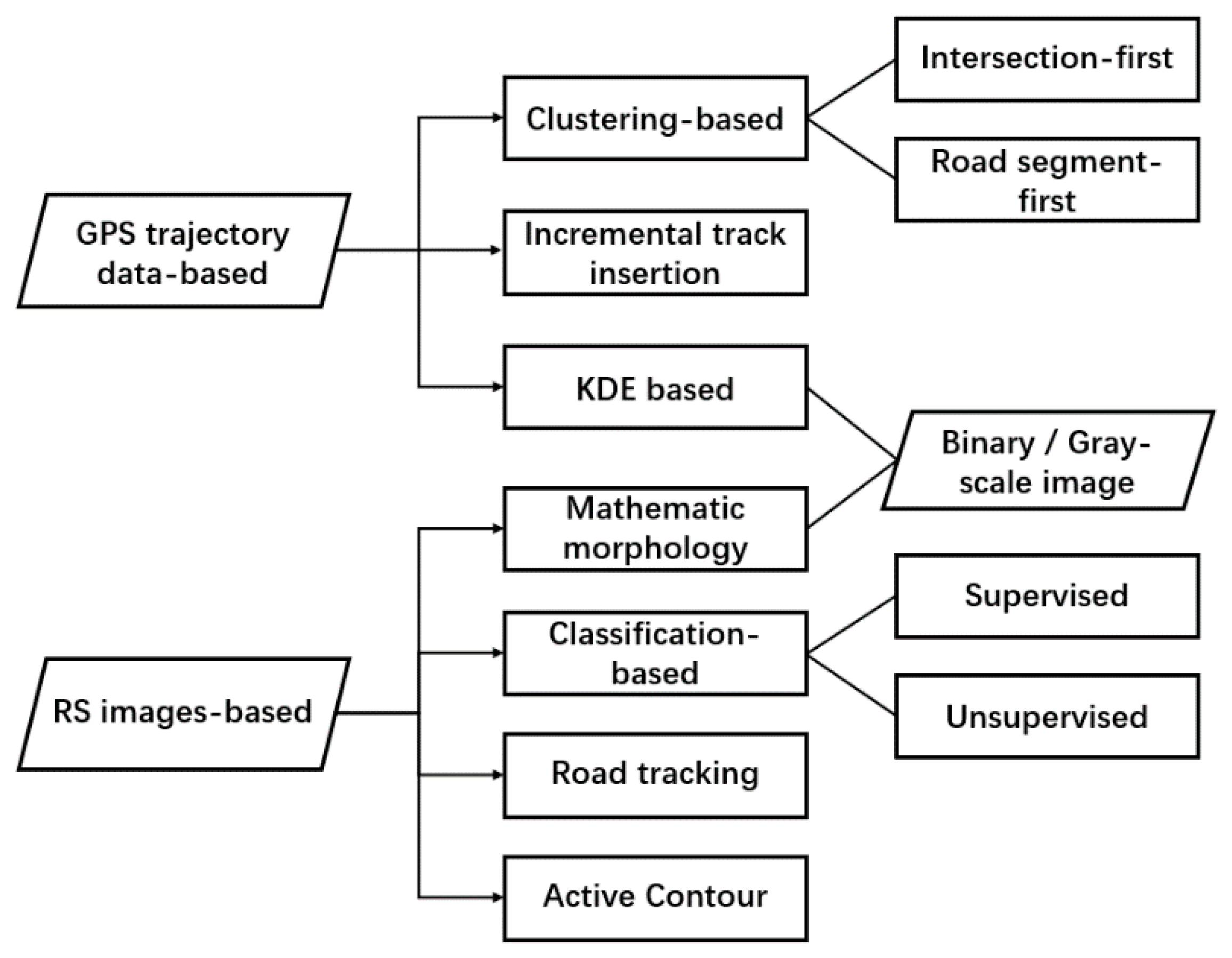
In conclusion,
Figure 1 outlines the rough categories of GPS trajectory-data-based and RS-images-based road network extraction methods. Road tracking methods can also benefit from adopting the intersection-first approach—if intersections and their connected road branches can be detected with high precision and high coverage, the difficulty of road tracking would be significantly reduced. However, due to GPS noise and multi-level disparity problems, the RS images-based methods cannot be directly applied to the density estimation map of GPS points.
Our method falls into the intersection-first approach category. Based on previous road intersection detection works, we present a combination of KDE and road tracking methods to overcome low-frequency and multi-level disparity of GPS trajectory data in road network extraction. First, we propose a density-based seeding algorithm and a road direction extraction algorithm, both based on template matching, to adapt road tracking to the density estimation map. We adopt a simple real-time correction in this tracking process to avoid tackling drastic GPS noise with limited local information. Then, we apply an active contour-based refinement algorithm to the extracted road network to recursively redo the correction, considering both the geometric information of an entire road and the density information. We emphasize that the impact of disparity is many-fold; by adopting a divide-and-conquer strategy, this problem can be easier solved at the local level.
3. Tracking Road Centerlines from Low-Frequency Trajectory Data
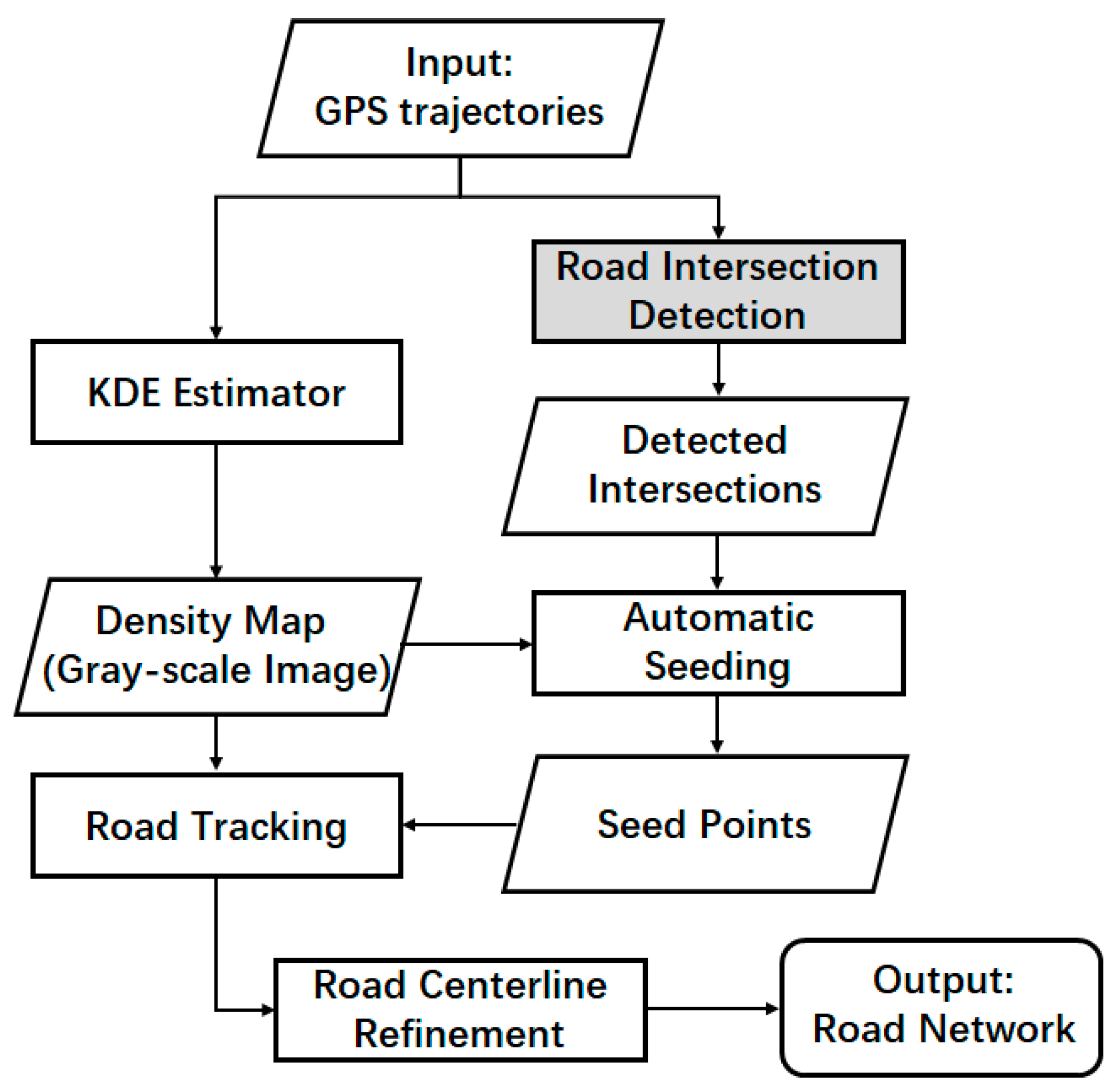
Our road network extraction method starts with a set of known intersection positions, which can be automatically provided by previous road intersection detection works [
18,
21] or can be input manually. The proposed method consists of three key steps for extracting road centerlines from low-frequency GPS trajectories—(1) generating seed points that exclusively define one end of a road; (2) tracking road centerlines with simple correction; and (3) refining road centerlines based on the active contour model. The workflow of our road centerline tracking method is shown in
Figure 2.
3.1. Automatic Seeding Based on Kernel Density Estimation Map
Seed points are the prerequisite of road-tracking algorithms. In our method, a seed point is defined as , where is the start point of road and is the orientation of road at that point (anti-clockwise, equals 0 when heading toward Earth’s true east). Every seed point is derived from an existing intersection, and exclusively defines one end of a road.
Given a known intersection’s center positio , the possibility of having a road branch with orientation is quantitively evaluated by matching the corresponding slice image with a set of ideal road template images. Least squares correlation matching is applied, along with a circular sampling approach, tackling the disparity problem of GPS trajectories. Based on the minimum-matching-distance criterion, multiple seed points can be drawn, and then be examined by the seeding algorithm. Here we use a point-based intersection model, which can cover a majority of intersections with cross-shape, T-shape, and Y-shape.
3.1.1. Density Estimation
Based on the well-known KDE algorithm [
24], the sparsely sampled GPS points can be transformed into a consecutive density function
on a rectangular domain
, which is the area of interest for road network extraction.
Since using a consecutive density function is calculation-intensive, a common practice is discretizing into a grid with a cell-length , and then only computing at the grid center points. Therefore, the density estimation result can be viewed as a gray-scale image , where stands for the density at grid .
Let
be the collection of all GPS points. First, a 2D histogram
is produced by counting the number of GPS points falling within each grid. Then, the density image
is computed as:
where
is the popular Gaussian kernel and has a bandwidth parameter
. Following a previous work [
16], we used
.
Notice that . It is faster to compute Equation (1) in two rounds of 1D convolution. Last, we discard the marginal information of , keeping as the central information. These improvements support using a smaller grid cell-length and conducting faster template-matching-based algorithms.
3.1.2. Template Matching
The previous section demonstrated a method to generate global density image from input GPS points. However, due to the GPS noise and the disparity problem [
16], automatic seeding requires focusing on the local density image (slice image) to apply pre-processing, such as median filters and image binarization.
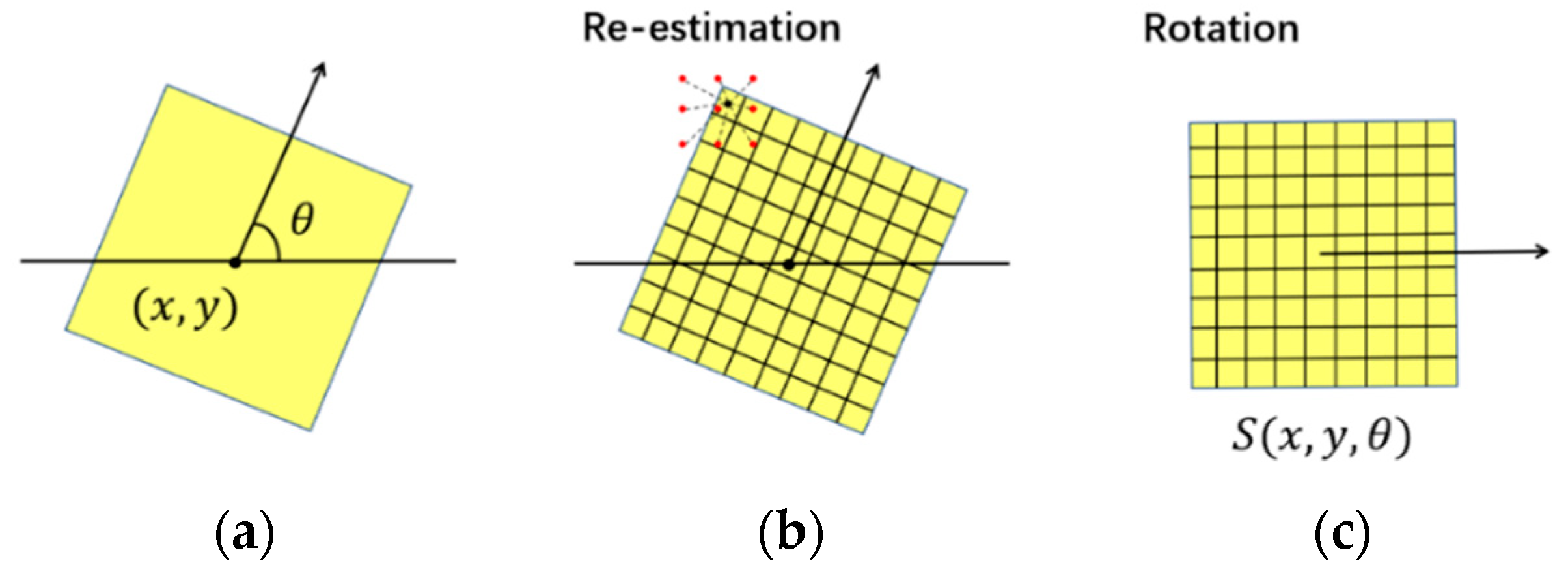
Given a position
,
Figure 3 shows how a slice image with orientation
is generated. Let
denote the slice image after rotation, for the convenience of matching with a set of fixed road template images. Its pixel value
stands for the density at the recalculated grid center
, which is computed as:
Then, density value
is re-estimated using Equation (1) and the nearby GPS points:
where
is the Gaussian kernel function.
is the image size satisfying
m, which means the slice image covers an area of 80
80 m.
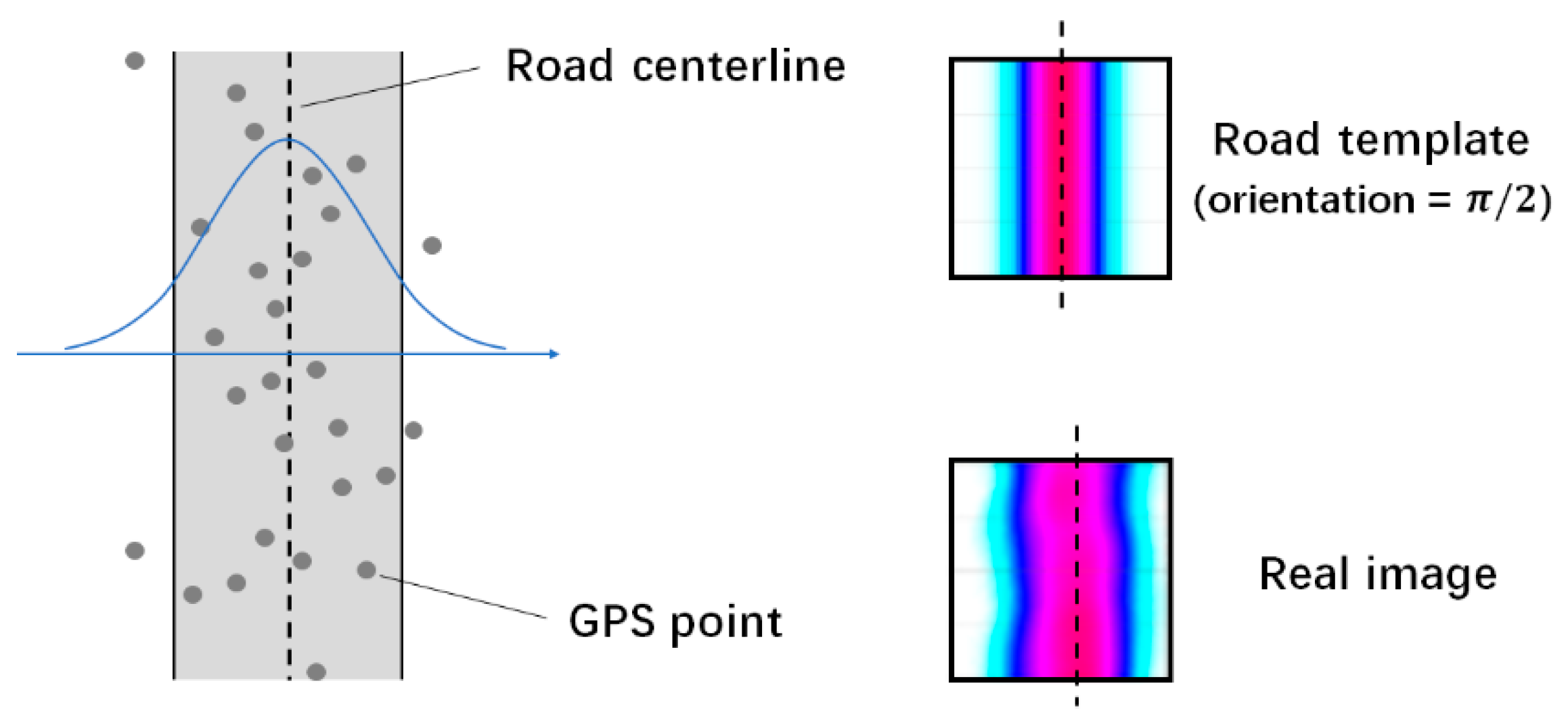
Next, we prepare a set of template images based on an ideal road model. A previous work [
25] showed that a Gaussian mixture model (GMM) can model the spread of GPS points within a road, reflecting the number of lanes and their corresponding traffic volume in reality. Here, we use single Gaussian model as a simplification, as shown in
Figure 4. Therefore, in a road template image, density of one pixel is solely determined by the distance between the pixel center and road centerline.
Let
denote a road template image with size
pixels, its pixel value
can be computed as:
where
is the orientation of road, and
is the bias parameter. The bandwidth
was determined by
to make the template image cover the entire density descending course. By shifting
pixels’ width perpendicular to its road orientation, we obtain
. The sizes of the slice image and template image were set to the same value throughout our method.
If the slice image was close enough to a template image, one road was detected in that slice image. When the slice image deviated from the road centerline, the road could still be detected from a broader template set
. Since a traffic volume difference might exist between different roads, we could not directly compare pixel value
with
. Therefore, we applied median filter and binarization to both images as pre-processing, before the matching.
Figure 5 shows that the median filter could effectively remove the GPS noise, then the traffic volume was normalized by binarization.
Last, the matching should be based on a distance measure between two images. We chose the squared distance for calculation convenience. Given an image
, let
denote the image after the above pre-processing. The matching distance between two images was defined as:
The smaller the matching distance, the more similar were the two images.
3.1.3. Seeding Based on Template Matching and Circular Sampling
After these preparations, we can now quantitively evaluate the possibility of a road connected to an intersection from arbitrary directions. The search was performed by circular sampling to avoid different road branches, overlapping within the intersection region.
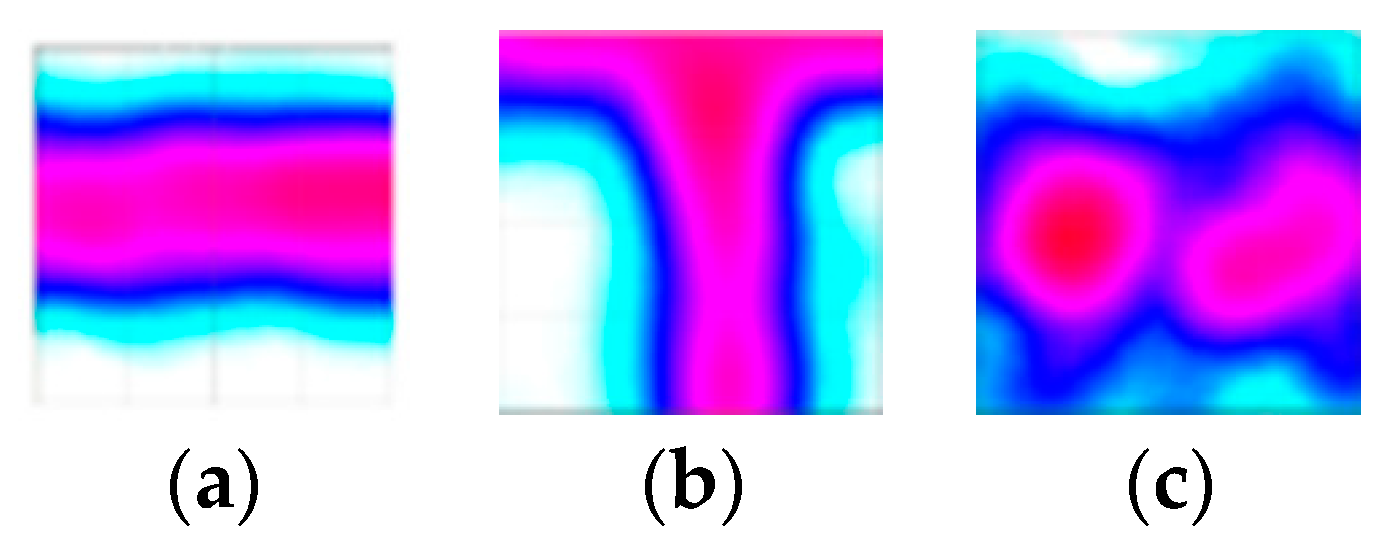
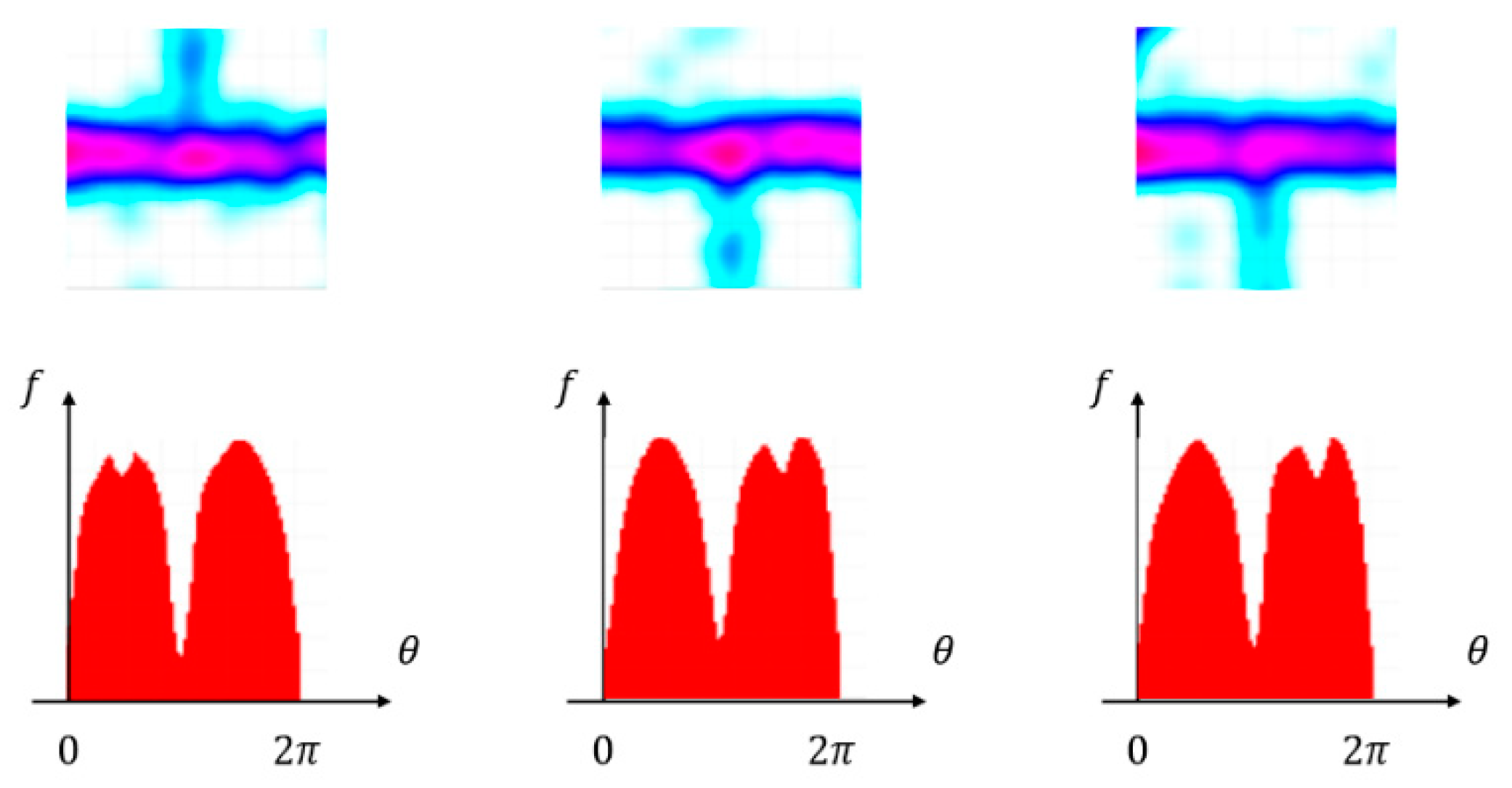
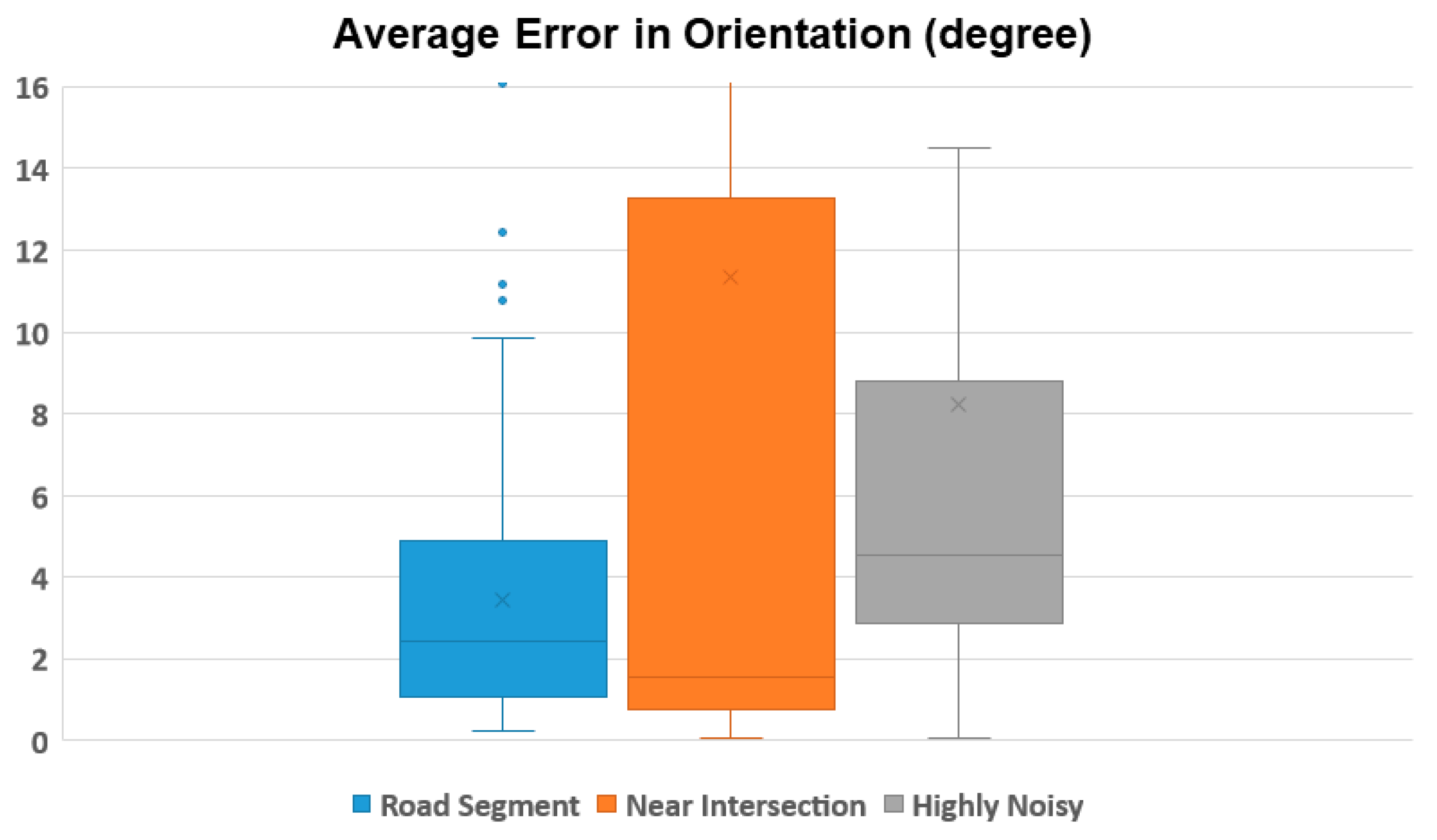
As shown in
Figure 6, we categorized the slice image into three classes—(1) road segment, (2) near intersection, and (3) highly noisy area. Experiments showed that the template-matching algorithm worked for road segments and highly noisy areas, but suffered a significant drop in accuracy for the areas near intersections. Detailed experimental results are provided in
Section 4.
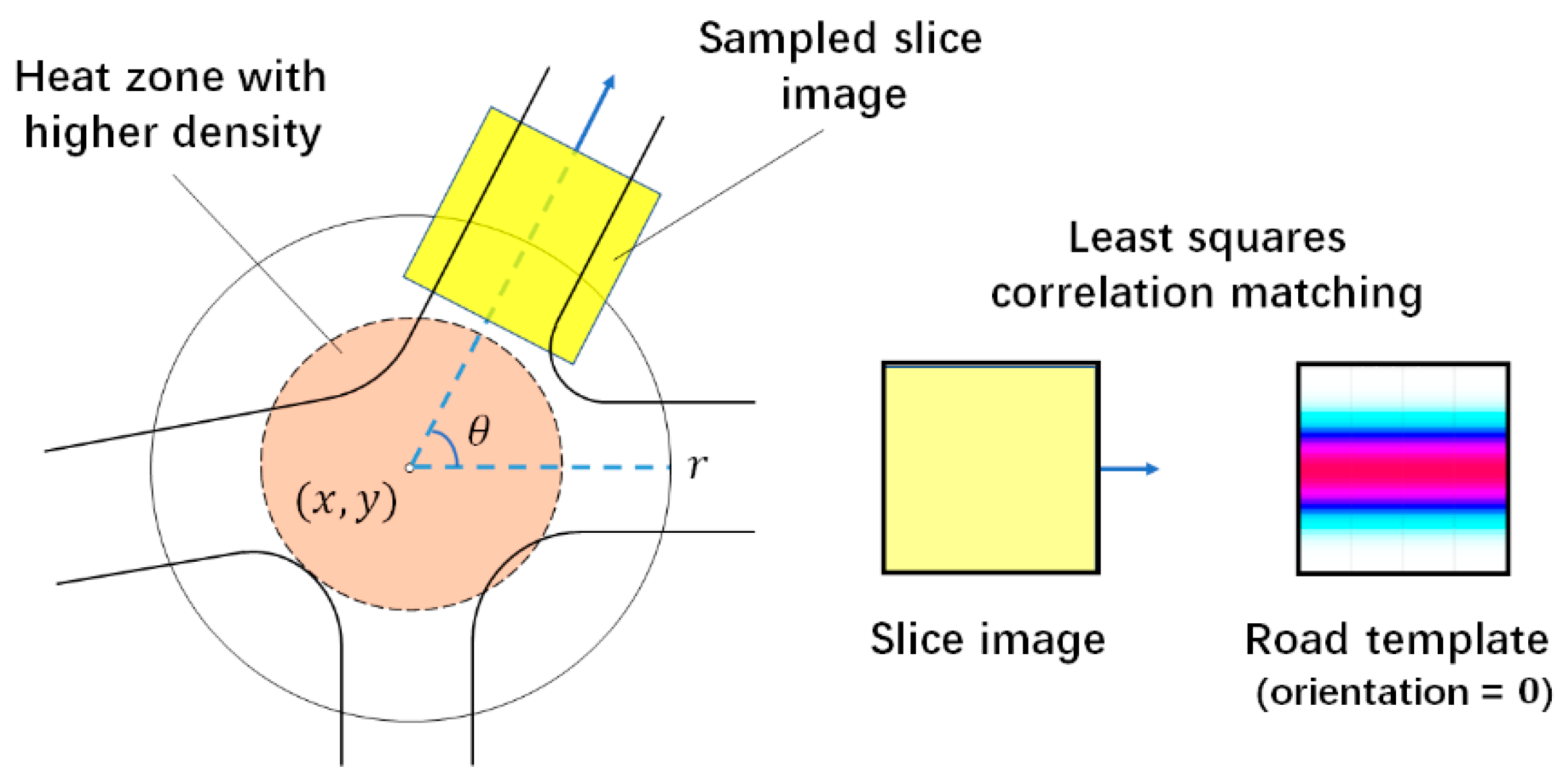
Therefore, we proposed a circular sampling-based seeding algorithm, as shown in
Figure 7, to avoid the drawback of the near-intersection areas. Given an intersection’s center position
, we used the slice image
to detect whether there exists a road branch with orientation
. By matching
with a set of template images, a matching distance function
with the orientation variable was defined as:
where
represents how far a deviation we accept from the road centerline; here, we set
. Radius
was set to 60 m through a series of experiments. Intuitively, smaller
represents a higher chance of having a road branch with orientation
.
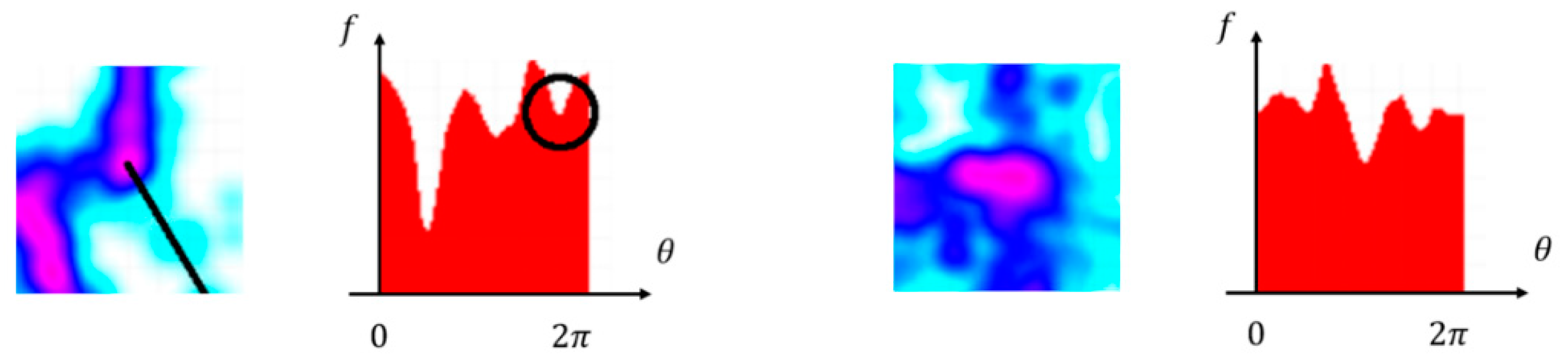
Figure 8 shows that each road branch corresponds to a local minimum of
. As a result, by finding all local minimum points
of
, the corresponding seed points
were generated. Since the number of intersections was limited, we adopted a simple enumerating solution in finding these local minimum points. We only computed
on a discretized set
an angle
that satisfied
would be selected by our seeding algorithm.
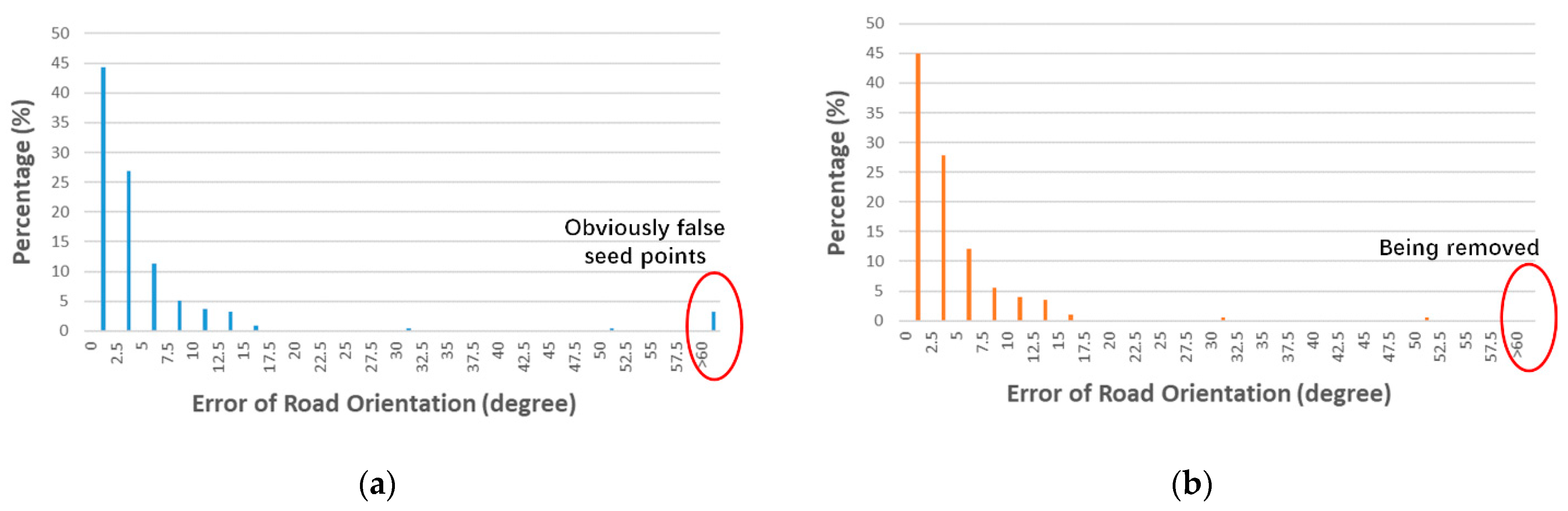
However, as shown in
Figure 9, the fluctuation of
caused by GPS noise led to many false seed points. By applying Gaussian smoothing on
, this problem could only be mitigated; therefore, we proposed density-based connectivity to verify the generated seed points. Given two planar points
, let
denote the connectivity between these points.
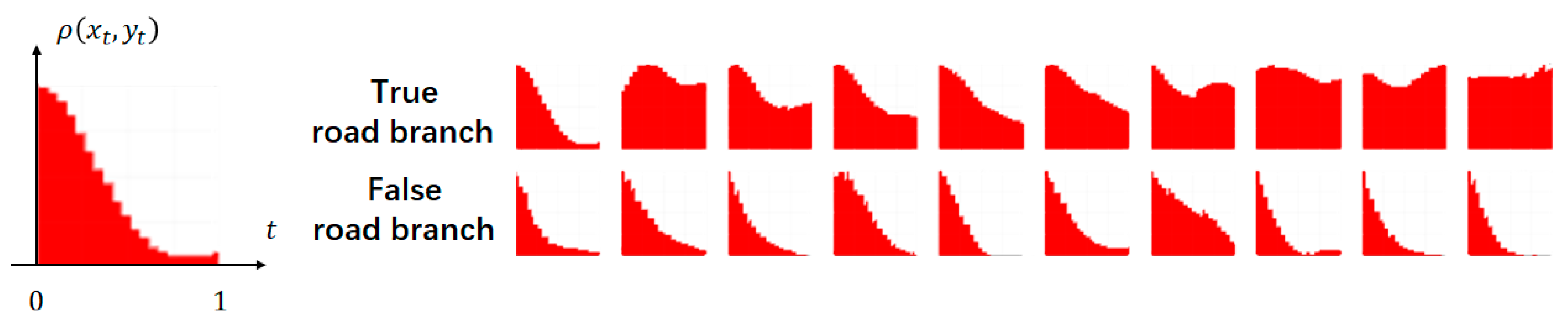
The proposed connectivity ranged from 0 to 1. Assuming
is the intersection’s center position, when
refers to a false road branch, the density value drops quickly along
, which results in low connectivity.
Figure 10 shows that true road branches tend to have larger integral area under curve
, therefore, a connectivity threshold can effectively separate the false road branches from the true ones.
Figure 10 also shows that, in most cases, the start point
has a much higher density value for traffic from different road branches overlapping at the intersection, which results in a lower
in general. Therefore, when verifying a seed point
by computing density-based connectivity, the segment falling within the intersection region should be truncated, as follows:
where
and
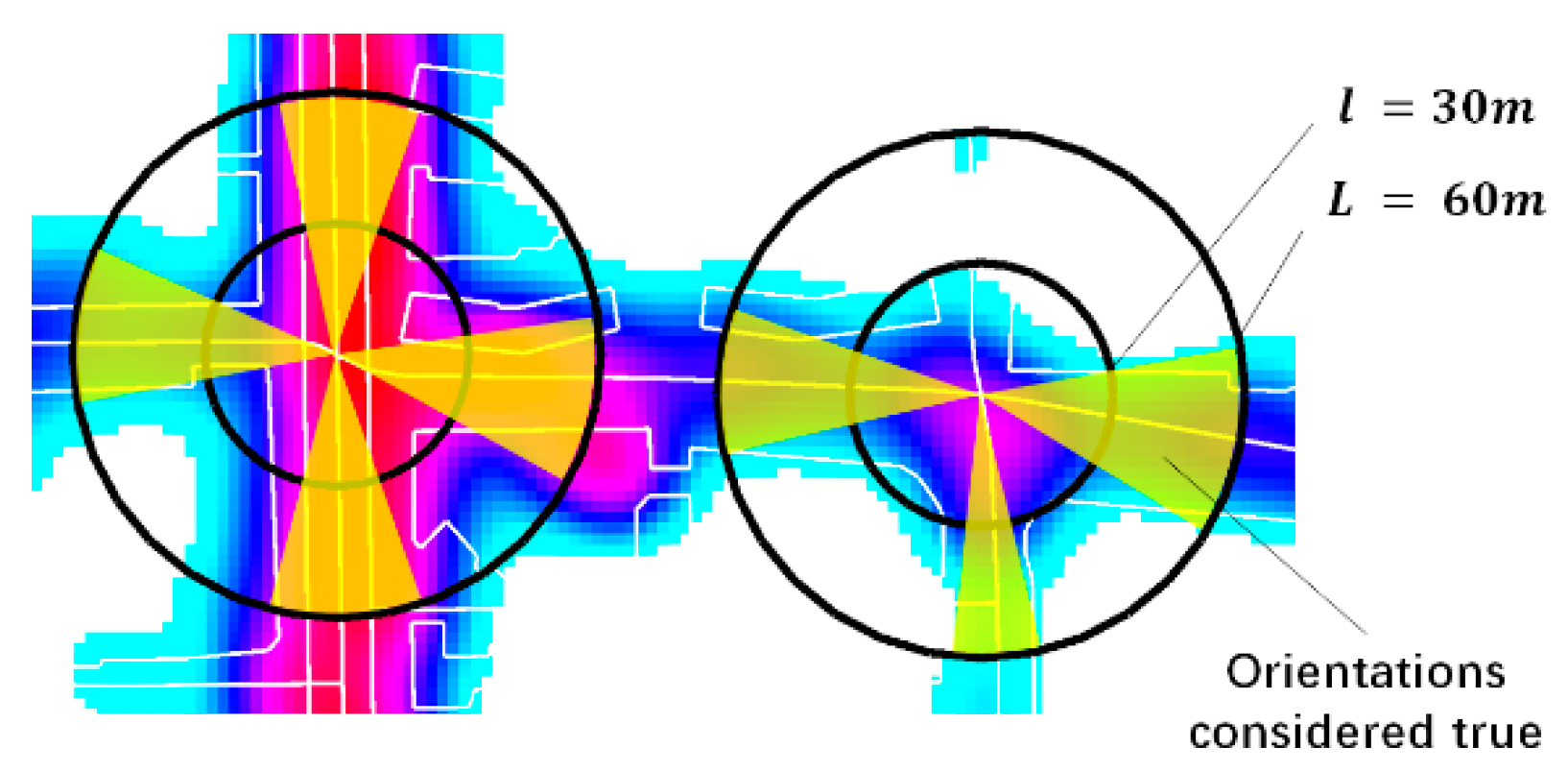
is a predefined connectivity threshold. We set
through a series of experiments. The other two parameters
m and
m were set through visualization, as shown in
Figure 11. Seed points that satisfied Equation (8) were considered true, and were fed to the road-tracking algorithm in the next step.
3.2. Tracking Road Centerlines Based on Kernel Density Estimation Map
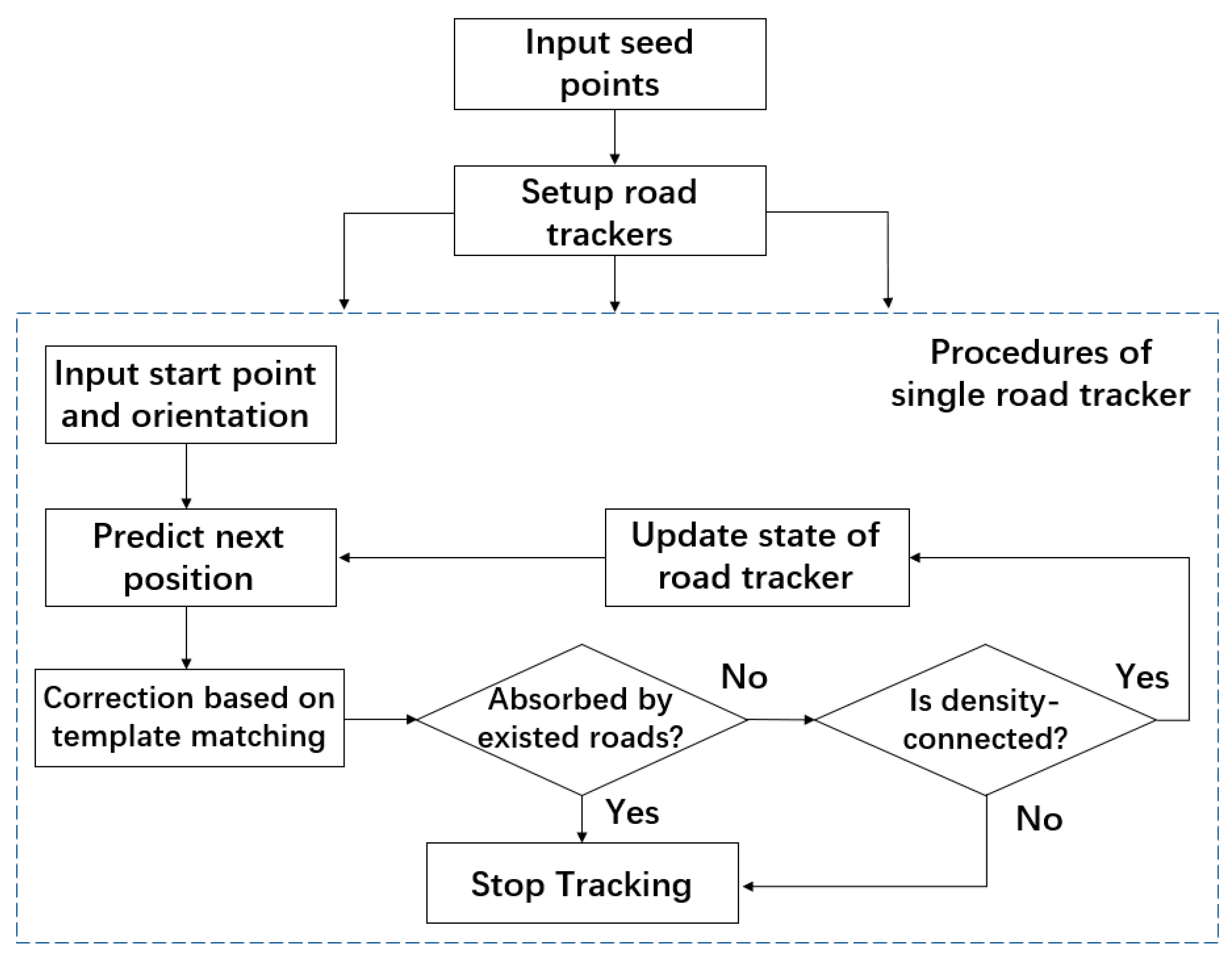
After the seeding algorithm generated a set of seed points from the density map, the tracking algorithm set up multiple road trackers to incrementally generate estimation curves of road centerlines. Each tracker corresponded to a single seed point . The estimation curves were further refined in the next post-processing course.
Here, we used a simple graph
to model the output road network, with known intersections as its initial vertex set
. For every road tracker, the prediction and correction two-step process was repeated—at the prediction step, the algorithm calculated the position of a new vertex based on the current state of the road tracker (using a predefined road model), and the successive positions formed the edges of the graph
. At the correction step, the algorithm measured the local density map around the newest position to refine the prediction and update the current state of the road tracker. As such, new edges were incrementally added to the shared graph
, until a stopping criterion was satisfied.
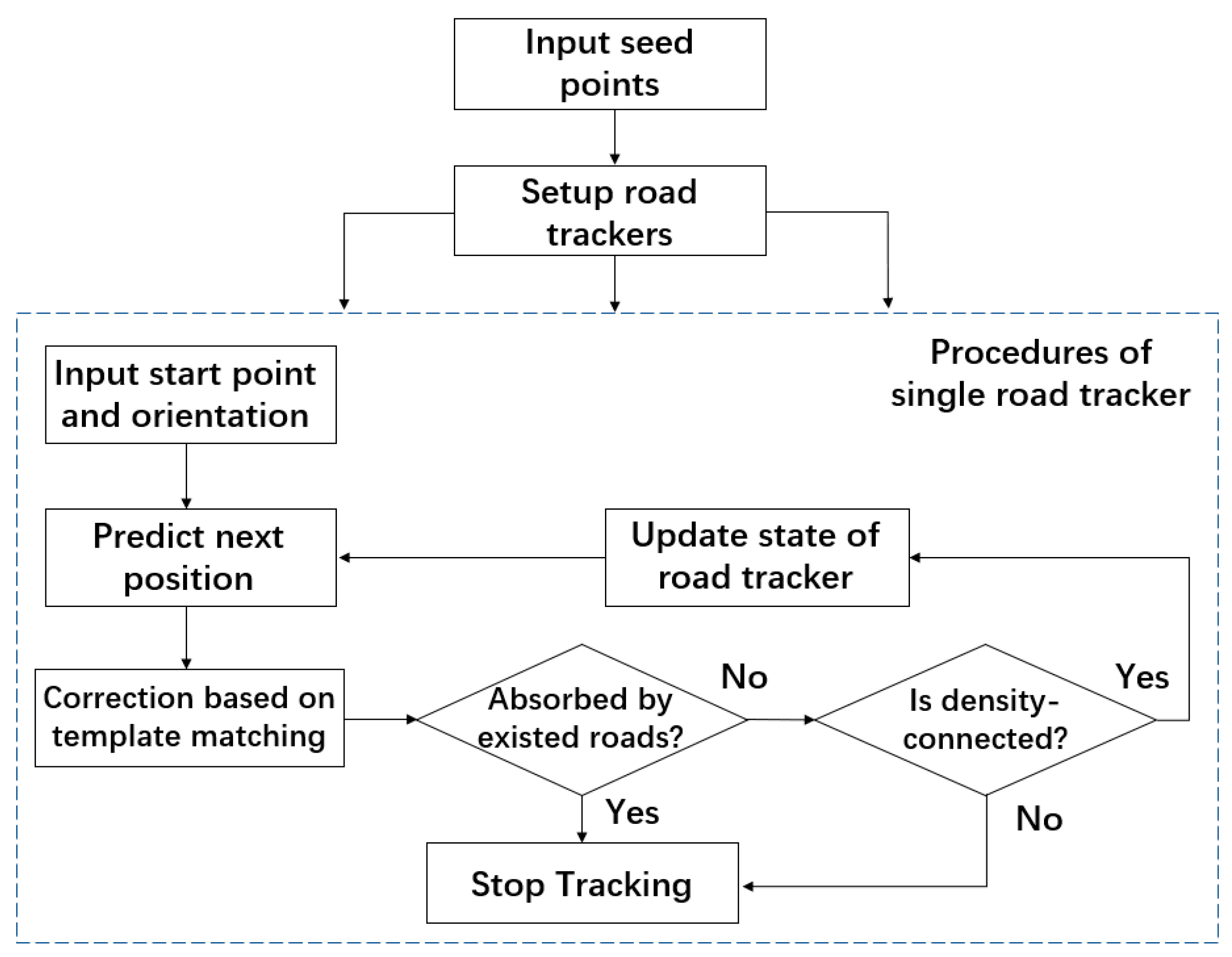
Figure 12 shows the flow chart of our road-tracking algorithm.
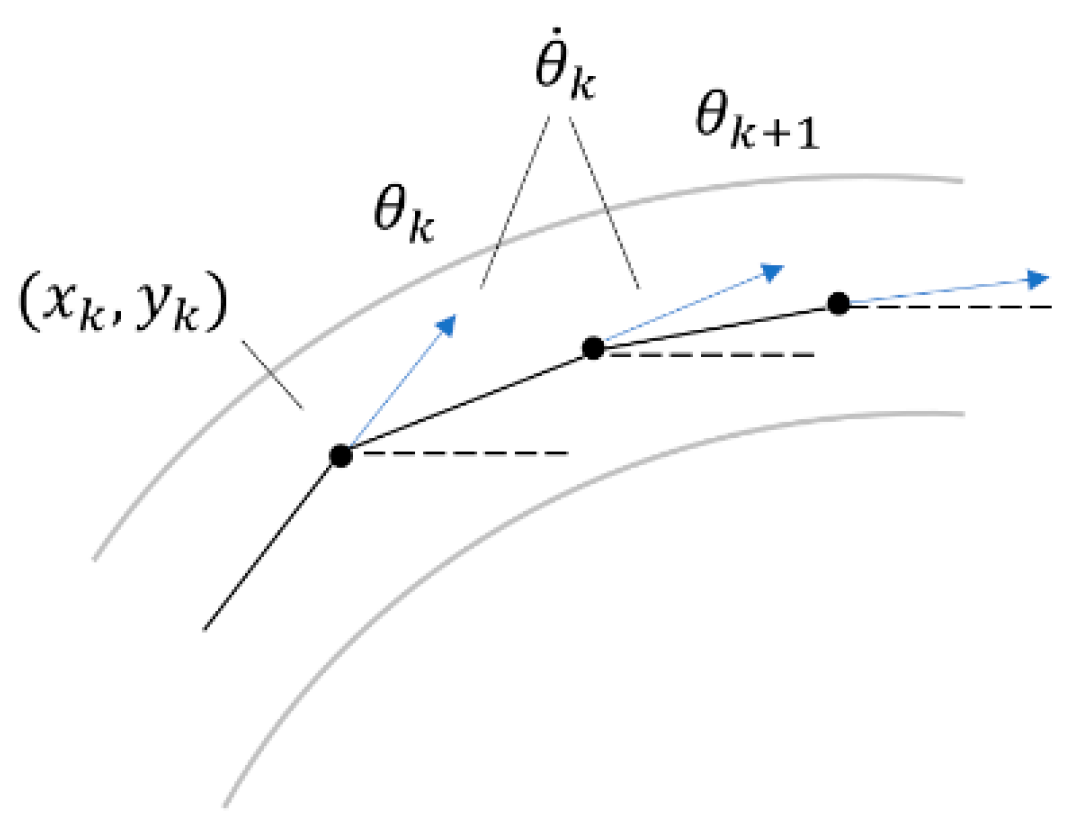
3.2.1. Road Model
We first introduced a road model that was used by previous methods [
10], which models one road as a series of states
. Here, attribute
represented the orientation of the road at position
,
represented the curvature of road at
, and
formed a polyline representing the road centerline.
Figure 13 shows that this definition of road state contained the necessary information to predict the most likely next point on the road centerline, along with other crucial road attributes.
Previous methods also modeled the tracking process as a stochastic process [
8,
10]. As a result, the prediction step could be written in an equation form:
where
is the tracking step length parameter and
represents the random variation in the road state between successive positions. The next step was measuring the local density map to support the correction step, which is referred to as another equation called the measurement equation:
where
represents the measurement noise. Assuming that both Equations (9) and (10) were linear and both
and
were Gaussian noise, the classical correction based on the Kalman filter could be derived [
8].
However, since precisely modeling and was infeasible for GPS trajectory data under complex urban environments, we adopted a simple correction in the tracking process by replacing and with a zero matrix. The underlying assumption was that roads have a fixed curvature except for a few turn-points.
3.2.2. Road Orientation Extraction Based on Template Matching
To support the correction step, we measured two attributes
from the local density map of the predicted state
, based on the template matching previously introduced in
Section 3.1.2. Attribute
represented the road orientation at the predicted point
, and
represented the grid deviation from the road centerline at a predicted point.
Since the tracking process required excessive measurements, we introduced another matching mode requiring far less computation. Recall that in
Section 3.1.3, generating a slice image
by redoing the density estimation placed a heavy computation burden on the seeding algorithm. Therefore, in this section, we only computed a slice image with fixed
, and let
denote the enlarged template image set, based on discretized orientations:
Using the same minimum-matching-distance criterion, the measurement result was obtained as:
where
belonged to the pre-generated set
. Here, we used
° and
, which could satisfy the simple correction needed.
Figure 14 demonstrates the difference between the two matching modes. By allowing the slice image to have an arbitrary orientation, the algorithm could use more local density information, but the computation cost was not equivalent to the gain.
3.2.3. Road Tracking Algorithm
In this section, we combined the road model and the measuring algorithm to present our road-tracking algorithm. Starting with the density map and a set of seed points, this algorithm incrementally built a road network with a topological structure. The tracking algorithm consisted of the following five steps:
(1) Initialization: For every seed point , create a road tracker with an initial state , and let distinguished seed positions be the initial vertex set of road network .
(2) Prediction: For every road tracker, based on the current state and Equation (9), compute the predicted state .
(3) Measurement: Based on the predicted state and Equation (12), obtain measurement result and from density map .
(4) Correction: Based on the measurement result and the following equation, compute the corrected state
:
where
is the grid cell length and
is the tracking step length.
(5) Stopping Criterion: Based on the current state
and corrected state
examine two stopping criteria with their positions
and
. First, examine the absorbing criterion using the extracted road network and the tracking step length:
If Equation (14) is satisfied, then
is absorbed by the closer vertex
or
of the road network, and a new edge from
to the absorb-vertex is added to the road network. Then, the corresponding road tracker stops. Otherwise, examine the density-connectivity criterion using Equation (7).
where
is the same connectivity threshold in Equation (8). If Equation (15) is satisfied, it is likely that the newly extracted road segment
crossed a road edge or ran into a dead end (zero density area). The corresponding road tracker stopped and the new edge was nullified in this situation. Otherwise, a new vertex and edge were added to the road network, and the road tracker continued tracking with the newest state
, by repeating steps (2) to (5).
The tracking step length played a key role in our road-tracking algorithm. Intuitively, when the step length was too large, the road tracker could not handle the dramatic change in road orientation well. Conversely, when the step length was too small, the road tracker would be trapped or distorted by the local heat zone of the density maps, such as the intersection regions. Here, we chose m through a series of experiments.
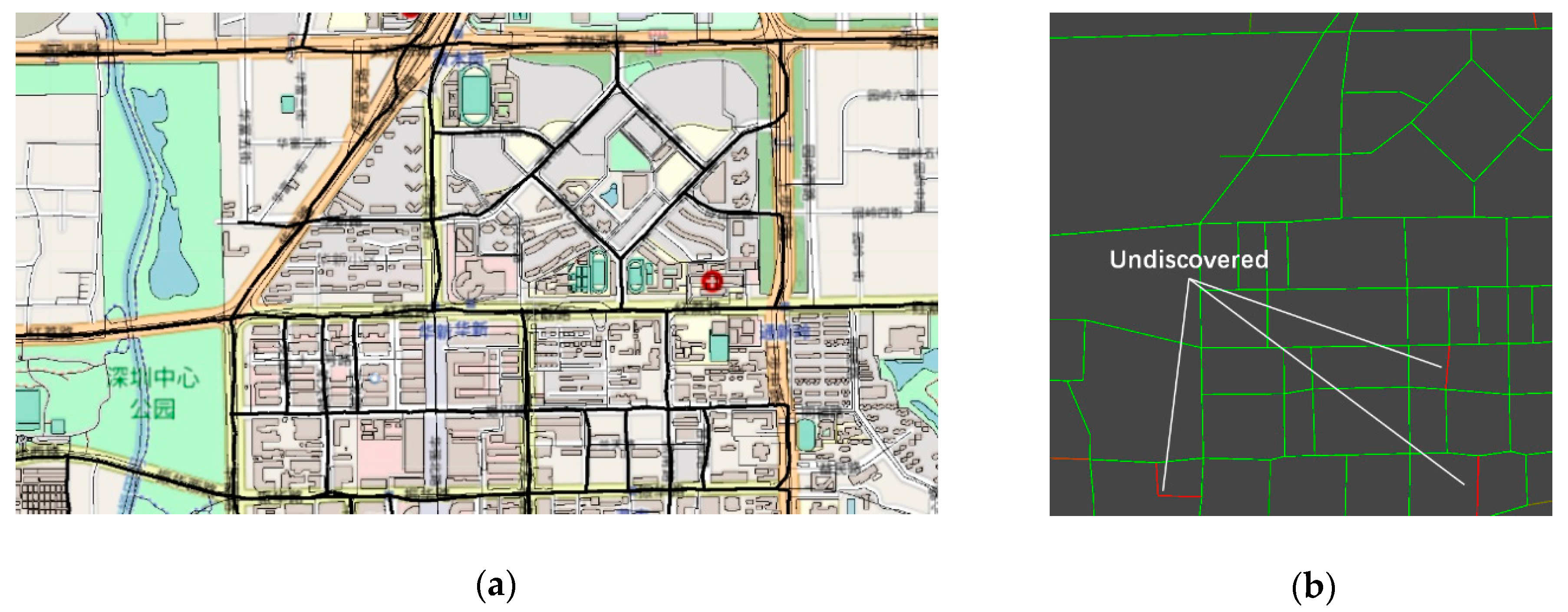
As shown in
Figure 15, after the input of ground-truth intersections, our road-tracking algorithm could generate continuous road centerlines interconnected to form a network, and achieved good coverage of existing roads (travelled by at least three trajectories). This provided a solid foundation for post-processing, to further enhance the quality of the road network.
In conclusion, the proposed template-matching-based road-orientation-extraction algorithm adapted the road-tracking algorithm for the GPS trajectory data. Although the correction step was simple, it considered 80 80 m area of local density information and was robust enough. A road-intersection-detection algorithm with high recall could help the road-tracking algorithm to avoid tackling the challenging intersection regions in advance.
3.3. Road Centerline Refinement Based on Active Contour
Due to the high GPS noise, most existing KDE-based road-network-extraction methods produced a number of zig-zag roads in the extraction result, as shown in
Figure 16. The proposed road tracking algorithm faced the same problem—due to the discretized output of the measurement algorithm, the extracted road centerlines often have fluctuating orientations on consecutive points, resulting in zig-zag roads, especially when the tracking step length is small.
Developing a density-aware road-centerline-refinement algorithm provided a general solution to this problem. We chose an active contour model for it defined an energy function on a deformable line, including a pair of structural internal force and external image force; therefore, it could balance between generating straight roads and over-fitting zig-zag roads. The refinement algorithm took a road centerline from a road-tracking algorithm as its input; based on a predefined energy function, the geometric refinement of the road centerline was done by minimizing its energy, yielding a smoothed road.
3.3.1. Active Contour Model
In this section, we introduce the definition of the original active contour model by Kass [
22], along with the minimization procedure, through variational calculus. Let
denote a deformable line in plane space, its energy function is defined as:
where
represents the internal energy, which controls the shape of curve
with its first-order term and second-order term;
represents the image energy when
is placed on a background image. Parameter
is also known as the elasticity parameter, where setting a larger
results in an optimal curve closer to the shortest path; and parameter
is also known as the stiffness parameter, where setting a smaller
allows the optimal curve to have a more drastic change in direction.
Based on Equation (16), the optimal curve was defined and obtained by minimizing the total energy. Kass proposed a numerical method using the Euler–Lagrange differential equation. If curve
extremized the functional
, then the following equation was satisfied:
Turning Equation (16) into discrete form yields an easier solution method, especially when
and
were not constant. Following Kass’ approach, two independent Euler–Lagrange equations could be drawn from Equation (17), and could be written in matrix form as:
where
and
represent the coordinates of nodes in the curve.
is a sparse coefficient matrix composed of
and
at these nodes.
=
and
=
are the derivatives of the image force.
Solving
from Equation (18) yields the optimal curve, which could be achieved by recursively computing the following equations, starting from the initial curve
:
where
is a step parameter and
is an
identity matrix. The inverse matrix of
could be computed by
decomposition. When the total energy change was less than a threshold, the curve
converged to a local minima.
3.3.2. Geometric Refinement of the Extracted Road Centerlines
Based on the active contour model, the geometric refinement of a road centerline could be defined as minimizing its energy, yielding a smoothed road. The refinement algorithm took its input from the road-tracking algorithm.
To solve the optimal road centerlines, first, we computed the coefficient matrix
. In our case, curve
was unclosed and had two fixed ends, resulting in the boundary conditions
and
. As
and
were fixed, we could only optimize the remaining points; therefore,
was an
pentadiagonal banded matrix:
where
by Kass’ approach [
22].
Following the common assumption made by road-tracking methods that road centerlines generally have low curvatures, we could assume that and were constant, except for a few turn-points. If is a turn-point, then is set to 0, and the th row of equals . The adaptive selection of turn-points is discussed later.
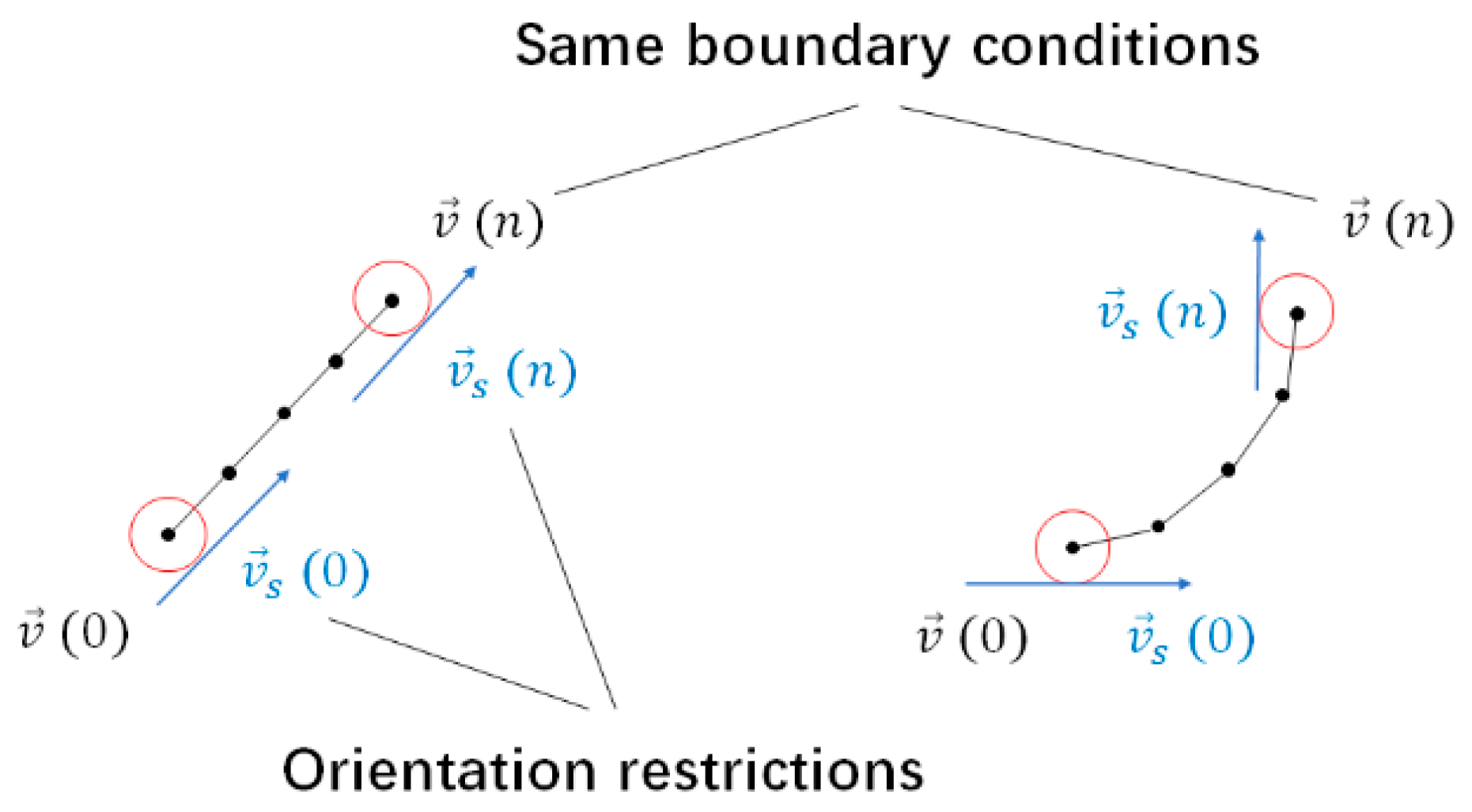
Next, we introduced orientation restrictions
and
to consider road orientations at both ends, as shown in
Figure 16. We included orientation restrictions in a matrix form
into Equation (18). Here
was satisfied, as we want orientation restrictions to only directly affect the first points of a road from two ends.
To determine
, since orientation restrictions were independent from image information (we could assume that the image force equaled to zero), the following equation held true for the optimization result:
Focusing on one side of the road, one could make a reasonable assumption that
also held true, where
was defined by prolonging the road in the opposite orientation. Based on these assumptions,
and
could now be solved using the first two rows of coefficient matrix
:
where
was computed by using the road orientation and tracking step length. By similarly computing
and
, yielded the complete restriction matrix
.
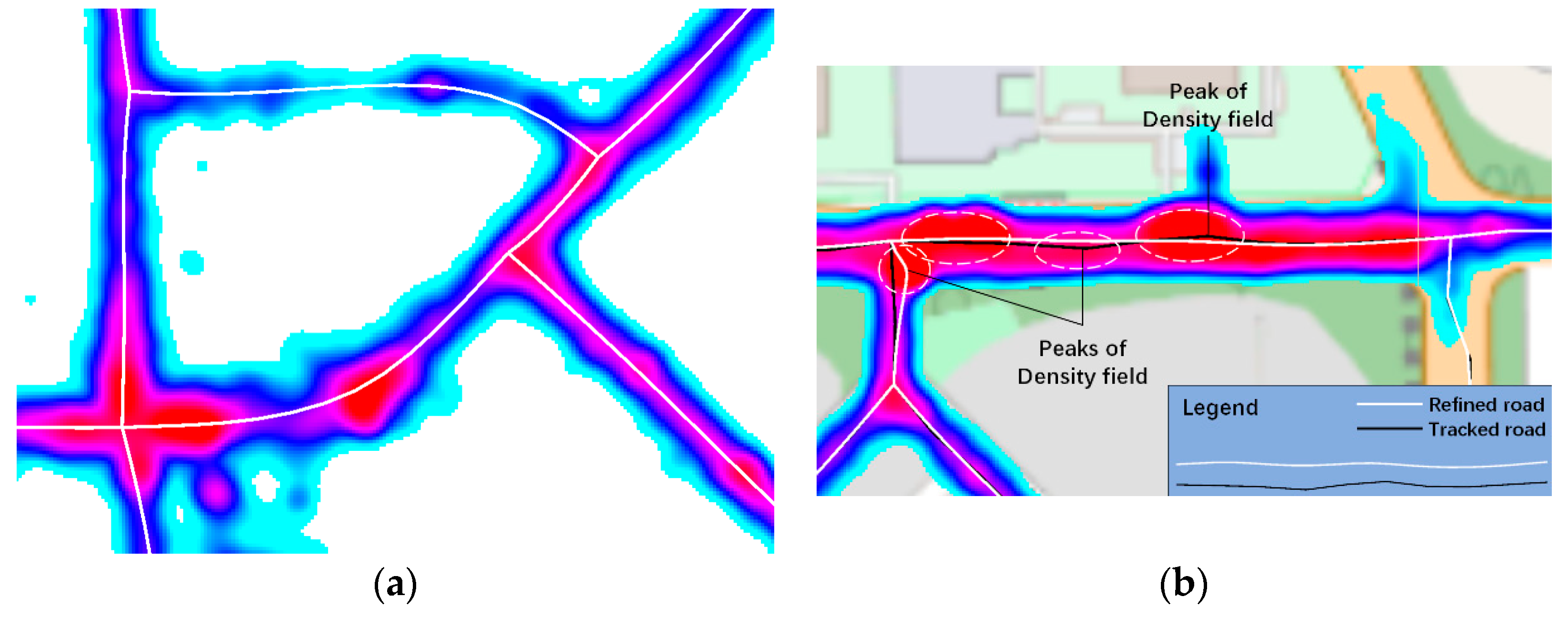
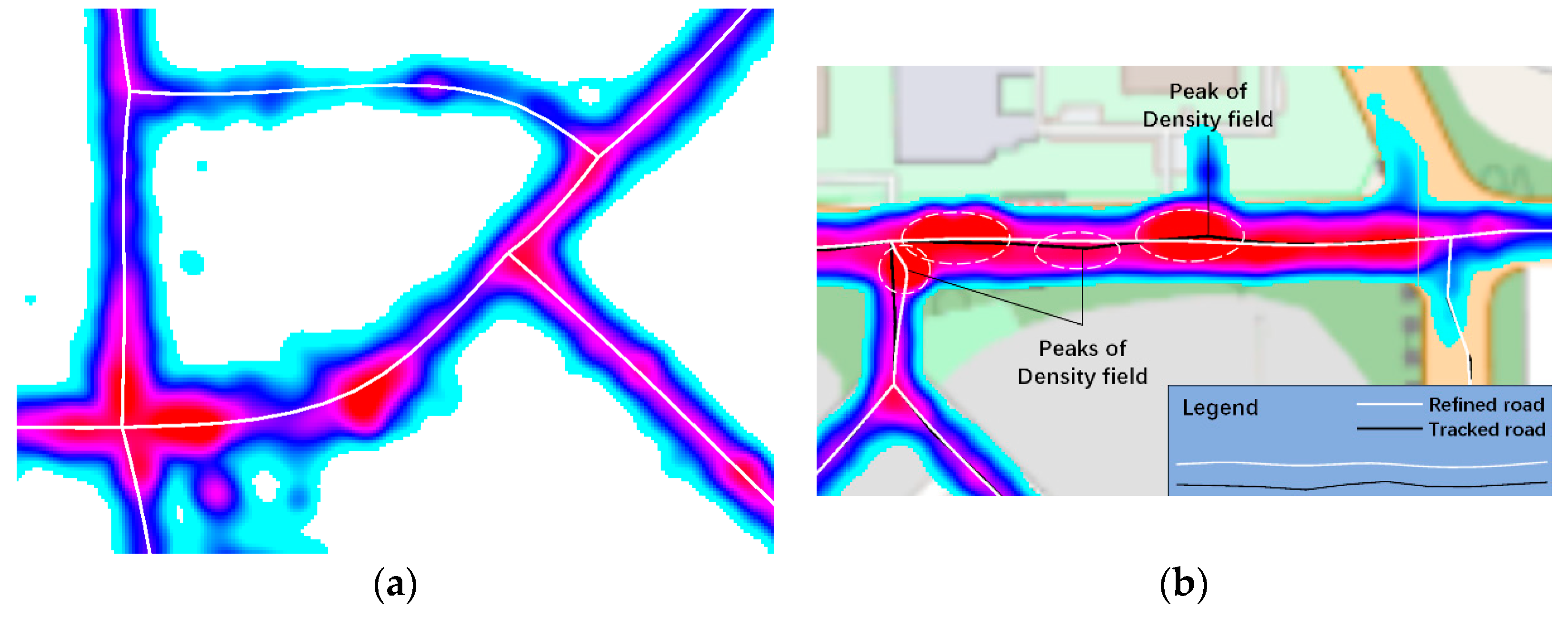
Previous works demonstrated that road centerlines could be viewed as mountain ridges of the density field [
17]; therefore, we define the image force as a negative density value
. However, due to the disparity problem, the image force varied largely from curve to curve, making it infeasible to apply a set of global parameters. Therefore, the image force must be normalized at the local level. Combining the orientation restrictions, Equation (18) was rewritten as:
where
is the normalization factor, which was computed using the density value along the curve
. The new equation could still be solved by Kass’ approach (see Equation (19)).
Last, we identified four tuning strategies through a series of experiments:
(1) Set a rather small ; therefore, the image force plays a priority role in refining road centerlines;
(2) Set a rather large ; here, we use ;
(3) Set a rather large step parameter ; here, we use ;
(4) Allow the curve to have multiple adaptively selected turn-points, where is satisfied.
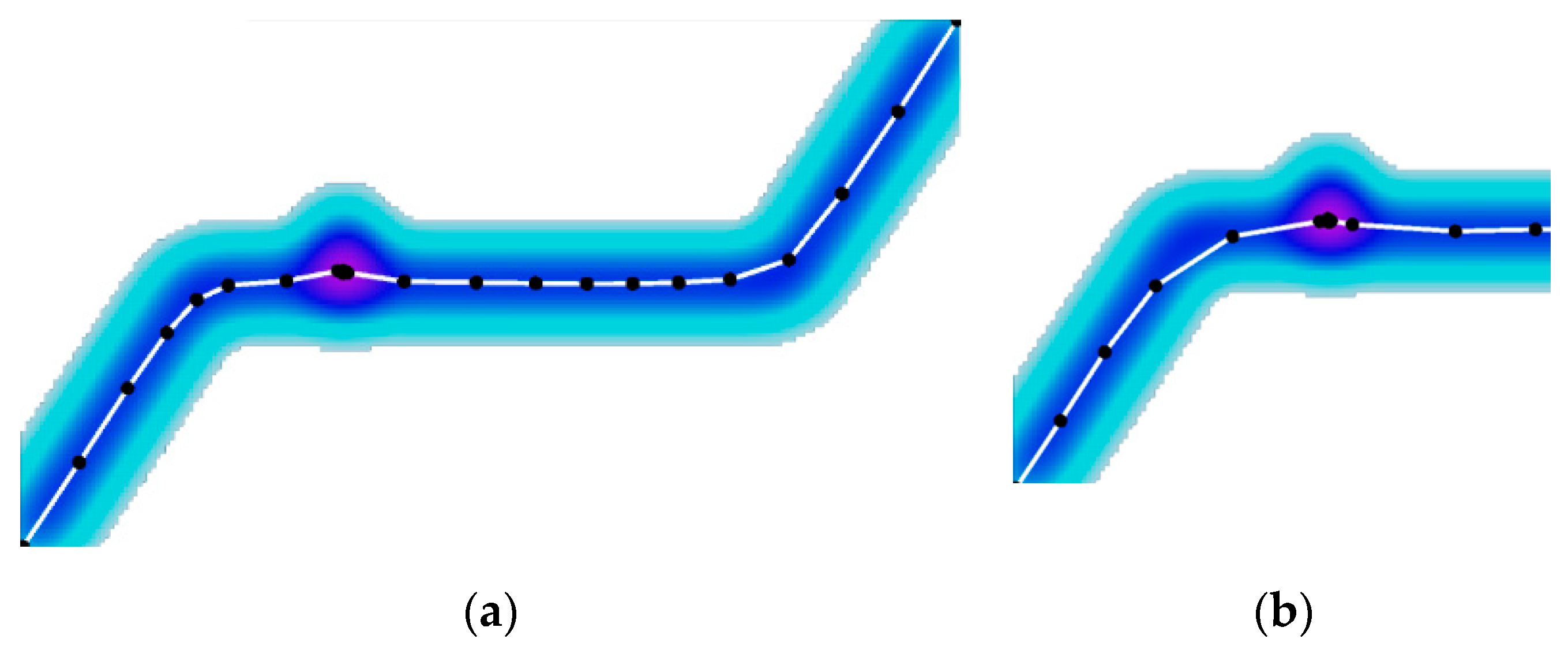
We briefly introduced these strategies. Since the input curve from the road-tracking algorithm was close enough to the real road centerline, a large step parameter could produce a robust iteration course. The impact of disparity was multi-level; local heat zones existed in the road due to the stay-points in the trajectories.
Figure 17 shows that these heat zones might distort an active contour, as the image force dragged its points into a density peak. Setting a larger
could mitigate this problem; however, it produced a new problem—if
and
were constant, the active contour could not accurately fit a road with drastic changes in orientation (
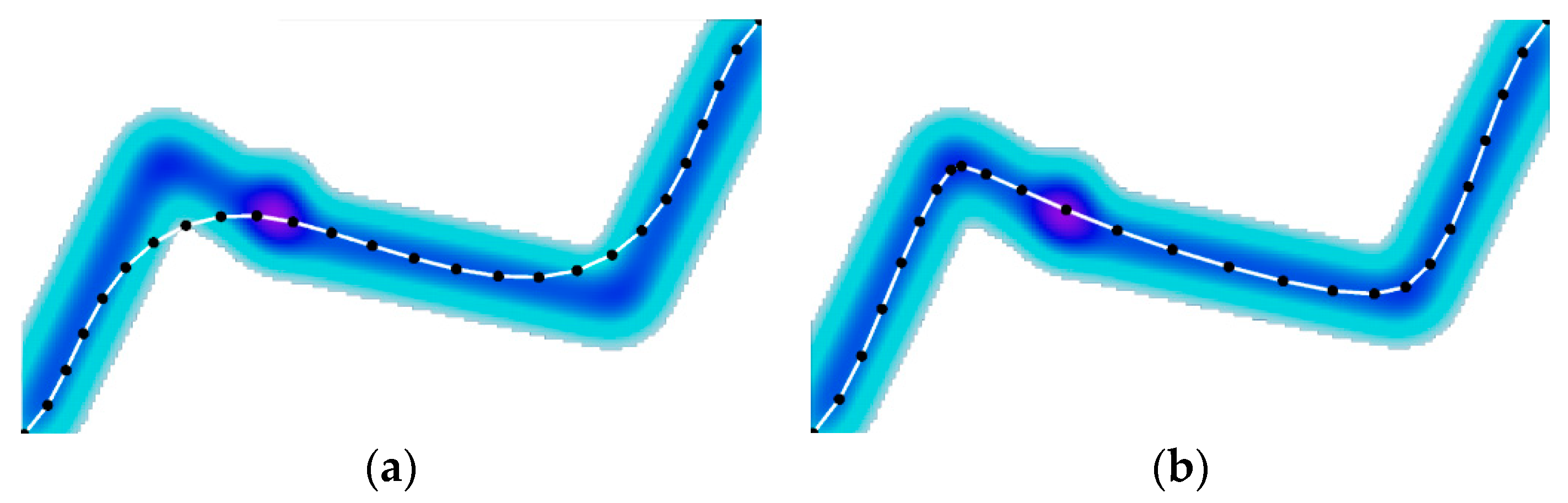
Figure 18a).
A previous work [
11] showed that introducing turn-points could solve this problem (
Figure 18b). At a turn-point,
was set to 0, allowing the optimal curve to drastically change in orientation. Turn-points could be adaptively selected by checking whether the orientation change
in the initial curve was larger than a given threshold (e.g.,
). Experiments showed that the adaptive turn-points could considerably improve the geometric refinement of road centerlines, which significantly reduced the zig-zag roads in the extracted road network.
5. Conclusions
In this paper, a low-frequency GPS trajectory data-based road network extraction method was proposed. The feasibility of GPS trajectory data provided a new means to automatically generating road maps. However, the prevalence of low sampling rate and multi-level disparity complicated the achievement of both high precision and high coverage in the generated map. Among various road-network-extraction methods, the intersection-first approach used the valuable information from road intersections in a divide-and-conquer manner, and it could be further benefited from the development of intersection-detection methods. Therefore, we followed this approach to propose a combined method that applied a road-tracking algorithm on the density map estimated by the KDE algorithm, where information of road intersections was represented as automatically generated seed points.
We found that the divide-and-conquer strategy was the key to tackling the multi-level disparity problem. By ruling out the near intersection region in advance, the template matching-based road-orientation-extraction algorithm performed better in general. The road-tracking algorithm could trace a road connecting two known intersections with more robustness. We pointed out that a recall-focus road-intersection-detection method could better suffice the need of road network extraction in this approach. By adopting an active contour-based road-centerline-refinement algorithm, our method yielded smoothed road centerlines than the traditional KDE-based methods. Compared to the previous GPS-trajectory-data-based road-network extraction methods, our method achieved a good balance between precision and recall using low-frequency trajectories. Moreover, the proposed road centerline refinement algorithm could serve as a general solution to zig-zag roads, considering both road structure and image information.
However, our method lacks the ability to refine the position of road intersections and to handle complicated intersection structures (e.g., highways and roundabouts). There also exists a small proportion of spurious roads due to false seed points, which requires an in-depth road-network-refinement method. Therefore, our future work will focus on applying the active contour for optimizing the position of a known intersection, and developing its ability to extract the precise boundary of city blocks from a density map, which is helpful in identifying the dead-end roads.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}