
An Automatic Derivation Method for Creation of Complex Map Symbols in a Topographic Map

Abstract
:1. Introduction
2. Definition of Four Derivation Modes
2.1. Feature-Point Mode
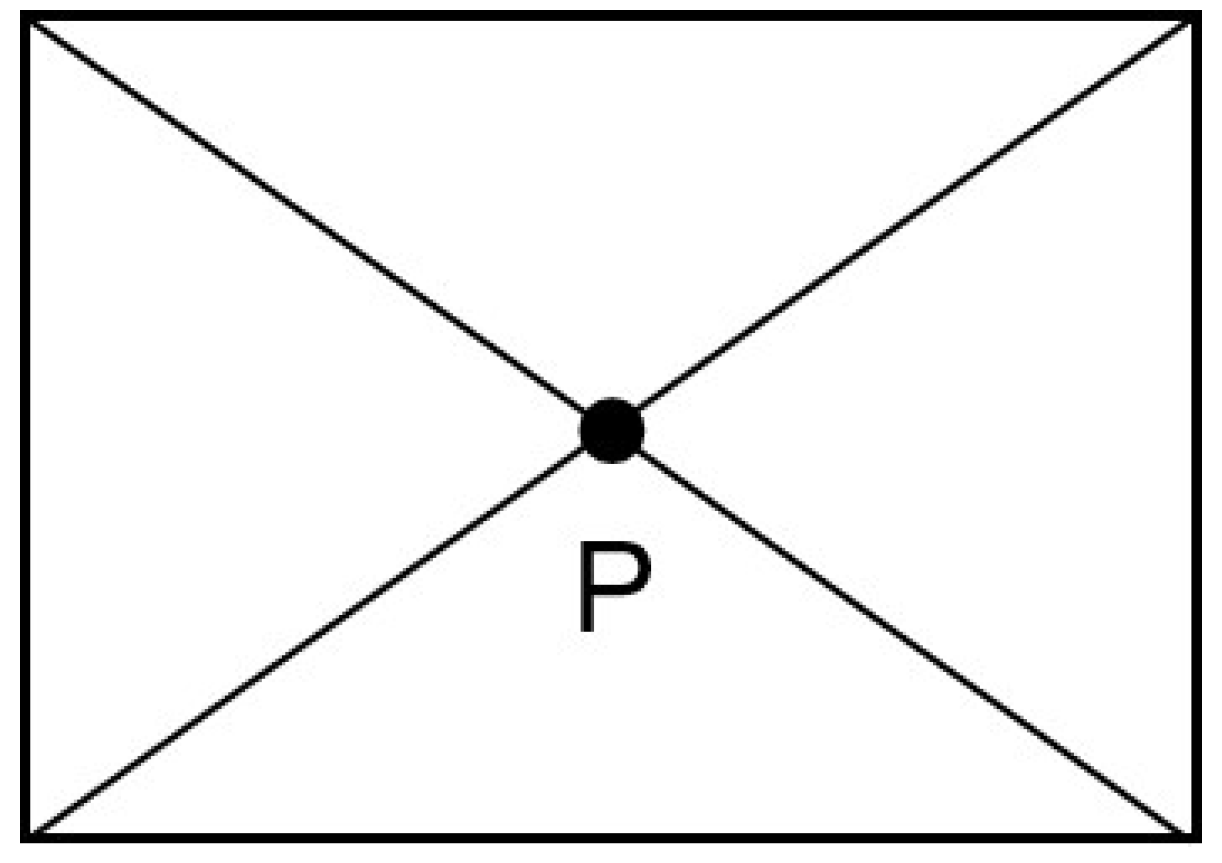
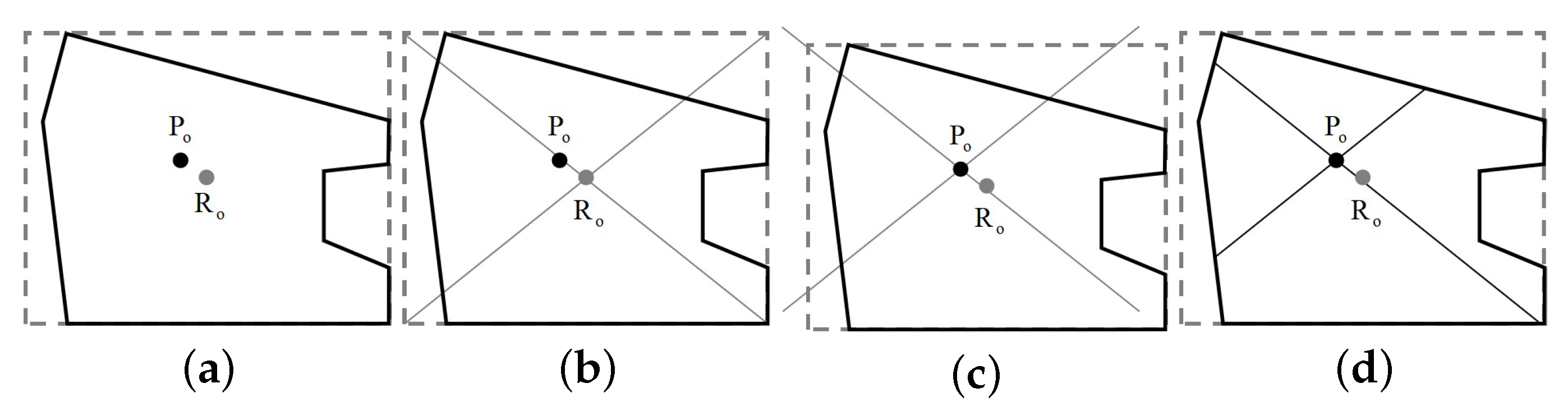
2.2. Centroid Mode
2.3. Feature-Line Mode
2.4. Parallel-Line Mode
3. Derivation Methodology
3.1. Technology Route
3.2. Derivation of Map Symbols Based on the Four Modes
3.2.1. Feature-Point Mode Derivation
- (1)
- The workflow for feature points extraction involves the following steps.
- (1)
- Neighborhood selection. The selection range is , is the upper range limit of the candidate angle, and is the upper and lower floatable range value of the upper range limit; for example, the angle threshold is set to 90, is preset to 20, then the node corresponding to angle in the range is selected as the feature point.
- (2)
- Neighborhood inversion. The selection range is ; for example, is preset to 20, then the nodes corresponding to the angle in the range cannot be selected as feature points.
- (2)
- Feature points processing and complex symbol derivation.
- (1)
- Secondary filtering of feature points.
- (2)
- Feature points densification.
3.2.2. Centroid Mode Derivation
- (1)
- Convex area entity derived from centroid mode.
- (2)
- Concave area entity derived from centroid mode.
3.2.3. Feature-Line Mode Derivation
- (1)
- Feature-line identification.
- (2)
- Symbol derivation based on feature lines.
3.2.4. Parallel-Line Mode Derivation
- (1)
- Determining base edge.
- (2)
- Deriving parallel lines
- (1)
- Less than bending rate.
- (2)
- Greater than bending rate.
3.2.5. Combination Mode Derivation
- (1)
- Disintegration idea.
- (2)
- Derivation steps.
4. Experiments and Analyses
4.1. Experimental Environment
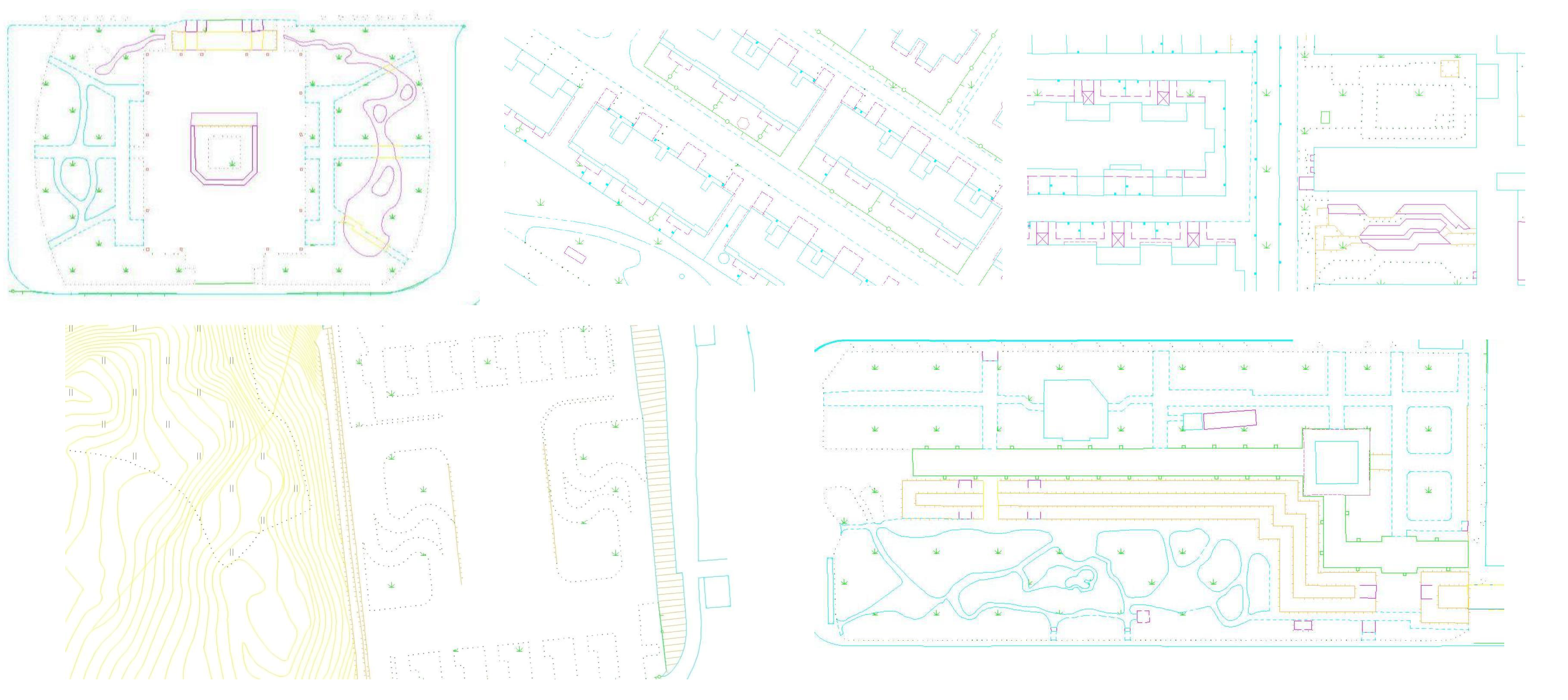
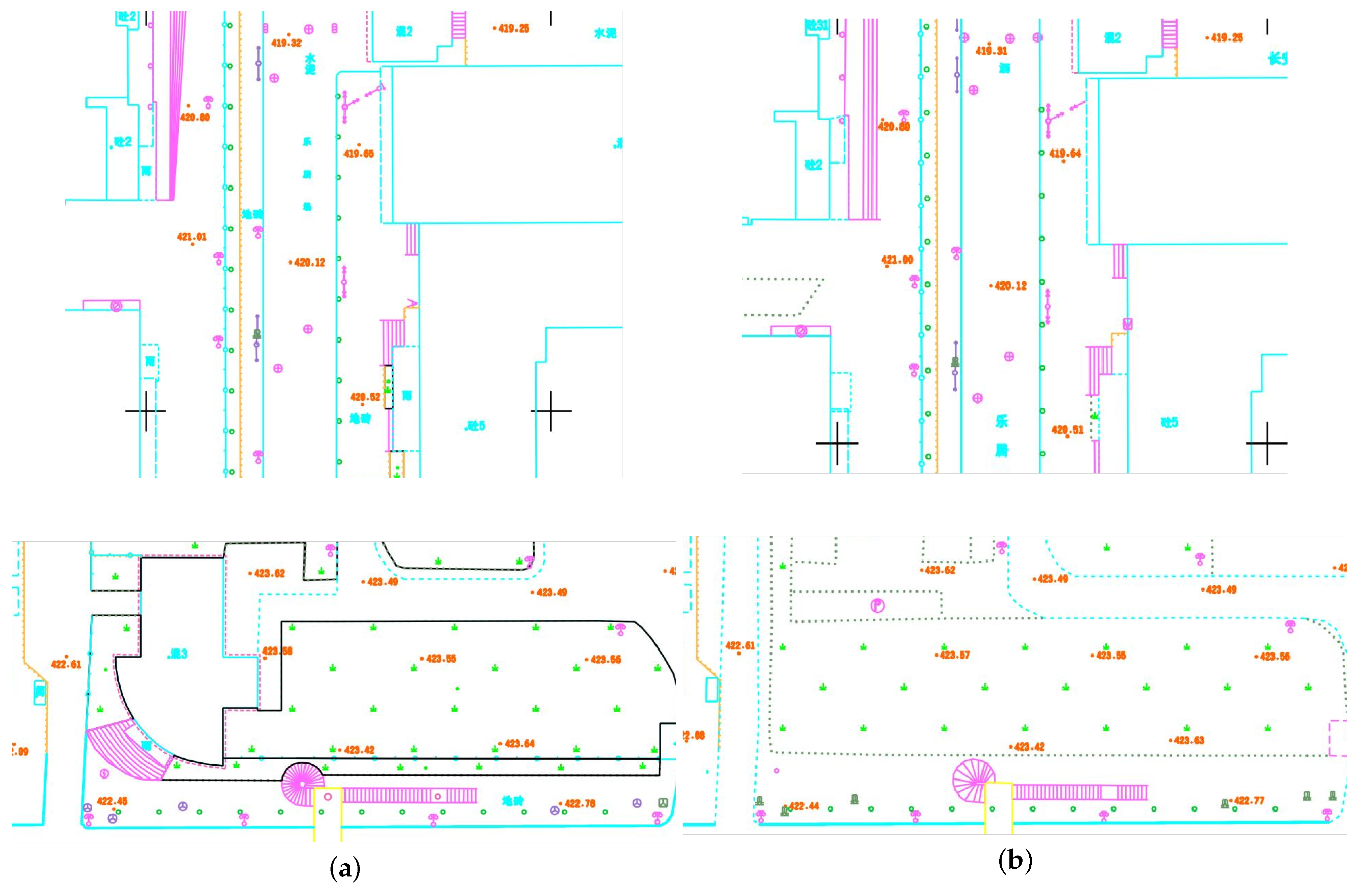
4.2. Automatic Cartography
5. Discussion
6. Conclusions
- (1)
- The experimental data include 171 map symbols; approximately 40% of the symbols are complex map symbols that are difficult to derive during creation, while the proposed method can create them easily and quickly. Correspondingly, the remaining 60% of map symbols are easy to create. Approximately 65% of the map area can be reasonably drawn by the line type, and these map symbols mainly are buildings and roads;
- (2)
- Through the comparison of the traditional methods, the speed of creating map symbols is more efficient, at approximately 10 times faster.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sluter, C.R.; Camboim, S.P.; Iescheck, A.L.; Pereira, L.B.; Castro, M.C.; Yamada, M.M.; Araújo, V.S. A Proposal for topographic map symbols for large-scale maps of urban areas in Brazil. Cartogr. J. 2018, 55, 362–377. [Google Scholar] [CrossRef]
- Medyńska-Gulij, B.; Żuchowski, T.J. An analysis of drawing techniques used on European topographic maps in the eighteenth Century. Cartogr. J. 2018, 55, 309–325. [Google Scholar] [CrossRef]
- Fu, Z.; Zhu, J.; Cai, J. Research on symbol and code of large scale topographic maps. Bull. Surv. Mapp. 2002, 11, 37–39. [Google Scholar] [CrossRef]
- Emilova, M.; Kotseva, E.; Salcheva, I. Stages and regulations of creating of a digital large-scale topographic map in scale 1:5000 and 1:10000. In Proceedings of the 4th International Conference on Cartography and GIS, Albena, Bulgaria, 18–22 June 2012; p. 39. [Google Scholar]
- Bartoněk, D.; Andělová, P. Method for cartographic symbols creation in connection with map series digitization. ISPRS Int. J.-Geo-Inf. 2022, 11, 105. [Google Scholar] [CrossRef]
- Divjak, A.K.; Pribičević, B.; Đapo, A. Comparative analysis of taxonomy, standardisation and availability of cartographic symbol sets for Crisis Mapping. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, XLII-3/W8, 241–248. [Google Scholar] [CrossRef] [Green Version]
- Klettner, S. Affective communication of map symbols: A semantic differential analysis. ISPRS Int. J.-Geo-Inf. 2020, 9, 289. [Google Scholar] [CrossRef]
- GB/T 20257.1-2017; Cartographic Symbols for National Fundamental Scale Maps—Part 1:Specifications for Cartographic Symbols 1:500 1:1000 1:2000 Topographic Maps. General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China and Standardization and administration of China: Beijing, China, 2017.
- Gindis, E.J.; Kaebisch, R.C. Chapter 1—AutoCAD fundamentals—Part I. In Up and Running with AutoCAD 2023; Gindis, E.J., Kaebisch, R.C., Eds.; Academic Press: Cambridge, MA, USA, 2023; pp. 3–39. [Google Scholar] [CrossRef]
- Wu, M.; Zhu, A.; Zheng, P.; Cui, L.; Zhang, X. An improved map-symbol model to facilitate sharing of heterogeneous qualitative map symbols. Cartogr. Geogr. Inf. Sci. 2017, 44, 62–75. [Google Scholar] [CrossRef]
- Xu, J.Y.; Yang, M.Y. The design and production of map symbol database based on ArcGIS. Adv. Mater. Res. 2012, 378–379, 405–408. Available online: https://www.scientific.net/AMR.378-379.405 (accessed on 7 December 2022).
- Wu, C.; Liu, J.; Liu, J.; Li, Z. Research on National 1:50000 Topographic Cartography Data Organization. In Proceedings of the International Conference on Geospatial Databases and Location Services of the Fourth Committee of the International Society for Photogrammetry and Remote Sensing, Suzhou, China, 14–16 May 2014; pp. 81–87. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Xiao, Q.; Wen, B.; Yang, C. Research and realization of orienteering map system based on Microstation. Eng. Surv. Mapp. 2017, 26, 55–60. [Google Scholar] [CrossRef]
- Zhang, X. Making topographic map symbols based on EPS2012. Intell. City 2022, 8, 18–21. [Google Scholar] [CrossRef]
- Xu, X.; Li, L.; Li, H.; Gao, D. Research on symbolization of urban topographic features in ArcGIS. In Proceedings of the International Symposium on Spatial Analysis, Spatial-Temporal Data Modeling, and Data Mining, Wuhan, China, 13–14 October 2009; Liu, Y., Tang, X., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2009; Volume 7492, p. 749214. [Google Scholar] [CrossRef]
- Macgeorge, G. Start automating AutoCAD today with basic VBA. Inside AutoCAD 2006, 14, 8–11. [Google Scholar]
- Sun, C.M.; Xu, Y.X. Development of topographic maps symbols library. In Proceedings of the 4th International Conference on Civil Engineering, Architecture and Building Materials (CEABM), Haikou, China, 16–17 July 2014; Volume 580–583, pp. 2782–2785. Available online: https://www.scientific.net/AMM.580-583.2782 (accessed on 7 December 2022).
- Chen, T.; Ai, T. Automatic Extraction of Skeleton and Center of Area Feature. Geomat. Inf. Sci. Wuhan Univ. 2004, 29, 443–446, +455. [Google Scholar] [CrossRef]
- Brahmia, Z.; Hamrouni, H.; Bouaziz, R. XML data manipulation in conventional and temporal XML databases: A survey. Comput. Sci. Rev. 2020, 36, 100231. [Google Scholar] [CrossRef]
- Zhu, G.; Guo, L.; Yin, G.; Xu, Y. Map Design and Cartography, 2nd ed.; Wuhan University Press Co., Ltd.: Wuhan, China, 2010. [Google Scholar]
- Kent, A.J.; Vujakovic, P.; Papay, G.; Board, C.; Cartwright, W. The Routledge Handbook of Mapping and Cartography, 1st ed.; Routledge: Oxfordshire, UK, 2017. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Entity Name | Symbolic Expression | Disintegration Idea |
|---|---|---|---|
| 1 | Parallel Bridge |  |  |
| 2 | Illumination Light |  |  |
| 3 | Crossing Bridge |  | 
|
| Method | Advantage | Disadvantage |
|---|---|---|
| Software editing | The drawing process is highly controllable and flexible | A large amount of manual creations |
| Secondary development | Semi-automatic | Specified manually yet |
| Proposed method | Fully automatic derivation | cartographers cannot intervene in the drawing process |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Yin, Y.; Fang, D.; Zheng, F. An Automatic Derivation Method for Creation of Complex Map Symbols in a Topographic Map. ISPRS Int. J. Geo-Inf. 2023, 12, 103. https://doi.org/10.3390/ijgi12030103
Yang J, Yin Y, Fang D, Zheng F. An Automatic Derivation Method for Creation of Complex Map Symbols in a Topographic Map. ISPRS International Journal of Geo-Information. 2023; 12(3):103. https://doi.org/10.3390/ijgi12030103
Chicago/Turabian StyleYang, Jiannan, Yong Yin, Dengmao Fang, and Fengjiao Zheng. 2023. "An Automatic Derivation Method for Creation of Complex Map Symbols in a Topographic Map" ISPRS International Journal of Geo-Information 12, no. 3: 103. https://doi.org/10.3390/ijgi12030103