



Genetic Programming to Optimize 3D Trajectories


Abstract
1. Introduction
1.1. Background and Problem Definition
1.2. Literature Review
1.2.1. Trajectory Optimization Algorithms
1.2.2. 3D Trajectory Optimization
1.3. Research Gap
1.4. Research Questions
- RQ1. Can functions encoding curves be effectively evolved to solve a minimization problem?
- RQ2. How does the geometry processing method affect optimization speed?
2. Materials and Methods
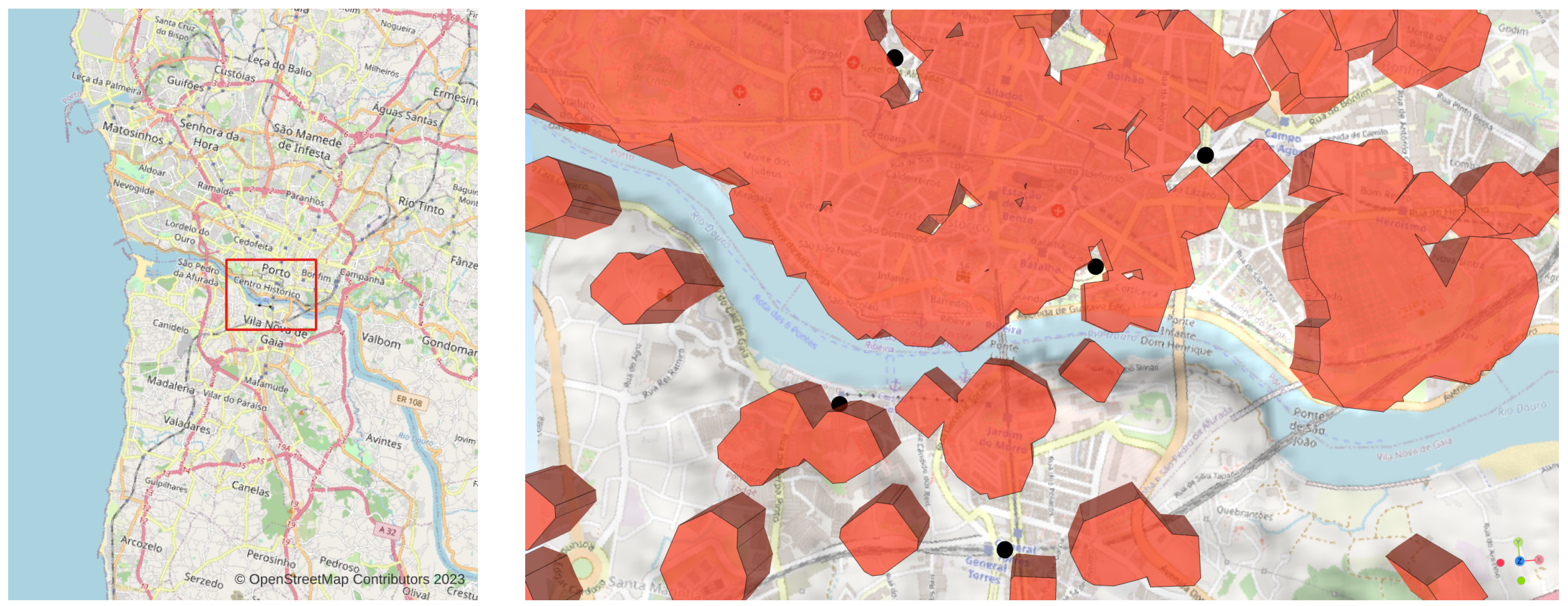
2.1. Study Area and Data Preparation
2.2. Research Methods
2.2.1. Evolutionary Computation Framework
2.2.2. GP Optimization Workflow
3. Results
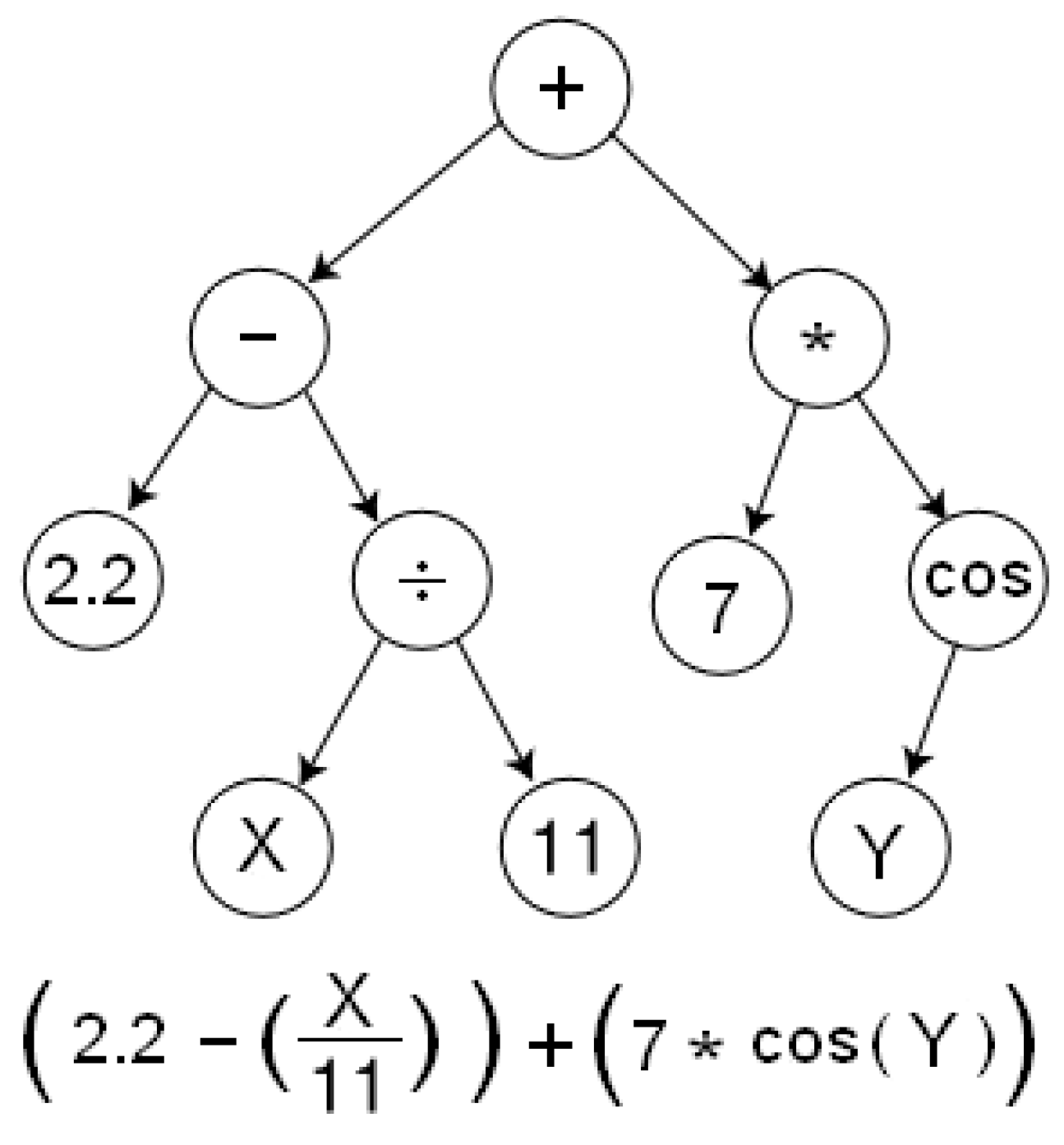
3.1. RQ1—Function Tree Representation
3.2. RQ2—Geometry Processing Method
3.2.1. Initialization and Convergence
3.2.2. Variation and Selection
3.2.3. Elitism
3.2.4. Quantifying Validity
4. Discussion
4.1. RQ1—Function Tree Representation
4.2. RQ2—Geometry Processing Method
4.3. Applicability and Scalability
4.4. Comparison with Similar Methods
4.5. Limitations and Potential Solutions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Background Concepts
- t: trajectory duration,
- : initial condition,
- : initial trajectory for finite interval t,
- : input trajectory for finite interval t,
- : long term cost of following trajectory,
- : minimum and maximum trajectory height limits,
- d: minimum distance of trajectory to obstacles.
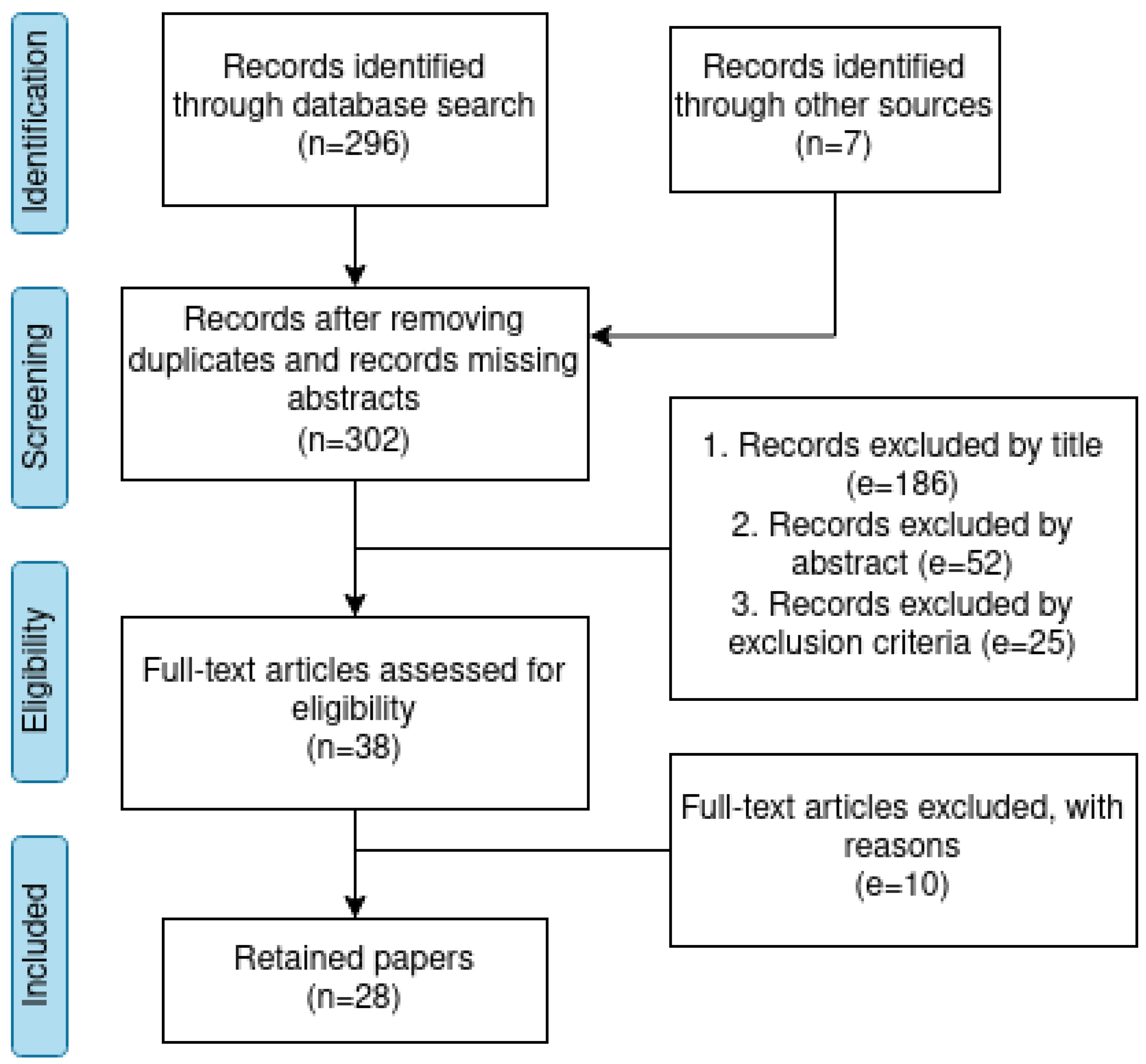
Appendix B. PRISMA Literature Review Methods

Appendix C. Comparison with Related Literature

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Performance Metrics | Overhead | Advantages | Disadvantages | |
|---|---|---|---|---|---|
| Zhang and Duan [18] | Population-based meta-heuristic: Adapted pigeon-inspired optimization and path smoothing. | Composite metric including length, power consumption and constraint violation. | Problem size dependent. Not specified. | Applicable to moving no-fly areas. | Long and exponentially increasing with increasing number of nodes in solution representation. |
| Zhang et al. [20] | Network solving heuristic: Multistep search, Adapted A* algorithm. | Detection probability, travel distance. | Problem size dependent, observed: 6.13–18.48 s. | Applicable to dynamic environments. | Continuous 3D space is discretized into finite search space, problem size dependent computation time. |
| Hildemann and Verstegen [9] | Population-based meta-heuristic: Adapted NSGA 2 and path smoothing. | Travel time, noise emission, energy consumption. | Problem size dependent, observed: 2–20 h. | Applicable to highly constrained air space. | Long and exponentially increasing with increasing number of nodes in solution representation. |
| Hai-yan et al. [17] | Population-based meta-heuristic: Particle Swarm Optimization with improved K-means clustering. | Terrain obstacle avoidance, detection probability, maneuverability constraints. | Sufficiently efficient for pre-route planning in actual combat. | Applicable to multiple alternative route planning. | Rudimentary and inexact terrain obstacles. Performance only demonstrated with two alternative routes. |
| Yang et al. [19] | Population-based meta-heuristic: Genetic programming using binary trees to encode movement increments. | Problem size dependent. Not specified. | Travel distance and threat avoidance. | Improvement over GA applied to the same problem. | Minimal exploitation of the third dimension. |
Appendix D. Genetic Programming Parameters
| Parameter | Type | Default | Description |
|---|---|---|---|
| pop_size | int | 1000 | Population size |
| max_height | int | 17 | Size limit per individual, by number of levels |
| max_length | int | 80 | Size limit per individual, by length |
| init_min | int | 1 | Minimum length of new individuals |
| init_max | int | 2 | Maximum length of new individuals |
| mut_min | int | 1 | Minimum length of new mutations |
| mut_max | int | 3 | Maximum length of new mutations |
| ngen | int | 250 | Number of generations |
| patience | int | 100 | Number of generations to wait for improvements |
| cxpb | float | 0.5 | Probability of mating two individuals |
| mutpb | float | 0.1 | Probability of mutating an individual |
| start | float | 0 | Starting point on reference axis |
| end | float | 1 | Ending point on reference axis |
| nsegs | int | 100 | Number of line segments in the 3D path |
| hof_size | int | 10 | Number of elite individuals to preserve |
| elitism | Bool | True | Whether to implement elitism |
| dbl_tourn | Bool | False | Whether to use two-stage tournament selection |
| tournsize | int | 3 | Number of individuals per tournament |
| parsimony_size | float | 1.7 | Weight of individual size in double tournament, |
| in the range | |||
| fitness_first | Bool | Whether to consider fitness first during double | |
| tournament selection, as opposed to size first | |||
| adaptive_mode | Bool | True | Whether to quantify intersections |
- g: number of generations;
- n: number of vertices in the output trajectory;
- m: number of barrier geometries;
- k: average number of vertices in each barrier geometry;
- i: number of iterations in the optimization;
- f: complexity of the intersection test.
Appendix E. GP Optimization Workflow

- Translate to origin;
- Normalize;
- Rotate about origin;
- Scale to geographic size;
- Translate to destination.
References
- Garip, Z.; Karayel, D.; Erhan Çimen, M. A study on path planning optimization of mobile robots based on hybrid algorithm. Concurr. Comput. Pract. Exp. 2022, 34, e6721. [Google Scholar] [CrossRef]
- Pezer, D. Efficiency of tool path optimization using genetic algorithm in relation to the optimization achieved with the CAM software. Procedia Eng. 2016, 149, 374–379. [Google Scholar] [CrossRef]
- Baker, B.M.; Ayechew, M. A genetic algorithm for the vehicle routing problem. Comput. Oper. Res. 2003, 30, 787–800. [Google Scholar] [CrossRef]
- Kim, H.; Kim, S.H.; Jeon, M.; Kim, J.; Song, S.; Paik, K.J. A study on path optimization method of an unmanned surface vehicle under environmental loads using genetic algorithm. Ocean. Eng. 2017, 142, 616–624. [Google Scholar] [CrossRef]
- Meng, H.; Xin, G. UAV route planning based on the genetic simulated annealing algorithm. In Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010; pp. 788–793. [Google Scholar]
- Wang, H.; Lyu, W.; Yao, P.; Liang, X.; Liu, C. Three-dimensional path planning for unmanned aerial vehicle based on interfered fluid dynamical system. Chin. J. Aeronaut. 2015, 28, 229–239. [Google Scholar] [CrossRef]
- An, P. Path Optimization Method of Autonomous Intelligent Obstacle Avoidance for Multi-joint Submarine Robot. J. Coast. Res. 2018, 82, 288–293. [Google Scholar] [CrossRef]
- Balicki, J. Multicriterion genetic programming for trajectory planning of underwater vehicle. IJCSNS 2006, 6, 1. [Google Scholar]
- Hildemann, M.; Verstegen, J.A. 3D-flight route optimization for air-taxis in urban areas with Evolutionary Algorithms and GIS. J. Air Transp. Manag. 2023, 107, 102356. [Google Scholar] [CrossRef]
- Hu, X.B.; Wu, S.F.; Jiang, J. On-line free-flight path optimization based on improved genetic algorithms. Eng. Appl. Artif. Intell. 2004, 17, 897–907. [Google Scholar] [CrossRef]
- Behzadi, S.; Alesheikh, A.A. A Pseudo Genetic Algorithm for solving best path problem. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 3, 253–256. [Google Scholar]
- Villarrubia, G.; De Paz, J.F.; Chamoso, P.; De la Prieta, F. Artificial neural networks used in optimization problems. Neurocomputing 2018, 272, 10–16. [Google Scholar] [CrossRef]
- Mokhtari, S.A. FOPID Control of Quadrotor Based on Neural Networks Optimization and Path Planning Through Machine Learning and PSO Algorithm. Int. J. Aeronaut. Space Sci. 2022, 23, 567–582. [Google Scholar] [CrossRef]
- Oultiligh, A.; Ayad, H.; Elkari, A.; Mjahed, M. Path Planning Using Particle Swarm Optimization and Fuzzy Logic. In Proceedings of the International Conference on Artificial Intelligence & Industrial Applications, Meknes, Morocco, 19–20 March 2020; Springer: Berlin, Germany, 2020; pp. 239–251. [Google Scholar]
- Qie, H.; Shi, D.; Shen, T.; Xu, X.; Li, Y.; Wang, L. Joint optimization of multi-UAV target assignment and path planning based on multi-agent reinforcement learning. IEEE Access 2019, 7, 146264–146272. [Google Scholar] [CrossRef]
- Sandurkar, S.; Chen, W. GAPRUS—Genetic algorithms based pipe routing using tessellated objects. Comput. Ind. 1999, 38, 209–223. [Google Scholar] [CrossRef]
- Hai-yan, Y.; Shuai-wen, Z.; Cheng, H. Multiple route planning algorithm based on improved K-means clustering and particle swarm optimization. In Proceedings of the 2018 Tenth International Conference on Advanced Computational Intelligence (ICACI), Xiamen, China, 29–31 March 2018; pp. 260–265. [Google Scholar]
- Zhang, B.; Duan, H. Three-dimensional path planning for uninhabited combat aerial vehicle based on predator-prey pigeon-inspired optimization in dynamic environment. IEEE/ACM Trans. Comput. Biol. Bioinform. 2015, 14, 97–107. [Google Scholar] [CrossRef]
- Yang, X.; Cai, M.; Li, J. Path planning for unmanned aerial vehicles based on genetic programming. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 717–722. [Google Scholar]
- Zhang, Z.; Wu, J.; Dai, J.; He, C. A Novel Real-Time Penetration Path Planning Algorithm for Stealth UAV in 3D Complex Dynamic Environment. IEEE Access 2020, 8, 122757–122771. [Google Scholar] [CrossRef]
- Ma, J.; Liu, Y.; Zang, S.; Wang, L. Robot path planning based on genetic algorithm fused with continuous Bezier optimization. Comput. Intell. Neurosci. 2020, 2020, 9813040. [Google Scholar] [CrossRef] [PubMed]
- Sundaran, K. Genetic algorithm based optimization technique for route planning of wheeled mobile robot. In Proceedings of the 2018 Fourth International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), Chennai, India, 27–28 February 2018; pp. 1–5. [Google Scholar]
- Hildemann, M.J. 3D Flight Route Optimization for Air-Taxis in Urban Areas with Evolutionary Algorithms. Ph.D. Thesis, University of Münster, Münster, Germany, 2020. [Google Scholar]
- Cakir, M. 2D path planning of UAVs with genetic algorithm in a constrained environment. In Proceedings of the 2015 6th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO), Istanbul, Turkey, 27–29 May 2015; pp. 1–5. [Google Scholar]
- Hanshar, F.T.; Ombuki-Berman, B.M. Dynamic vehicle routing using genetic algorithms. Appl. Intell. 2007, 27, 89–99. [Google Scholar] [CrossRef]
- Mane, S.B.; Vhanale, S. Genetic algorithm approach for obstacle avoidance and path optimization of mobile robot. In Computing, Communication and Signal Processing; Springer: Berlin, Germany, 2019; pp. 649–659. [Google Scholar]
- Jing, Y.; Luo, C.; Liu, G. Multiobjective path optimization for autonomous land levelling operations based on an improved MOEA/D-ACO. Comput. Electron. Agric. 2022, 197, 106995. [Google Scholar] [CrossRef]
- Illman, P.E. The Pilot’s Handbook of Aeronautical Knowledge. 2023. Available online: https://www.faa.gov/regulations_policies/handbooks_manuals/aviation/phak (accessed on 19 August 2024).
- OpenStreetMap Contributors. Planet Dump Retrieved from https://planet.osm.org. 2017. Available online: https://www.openstreetmap.org (accessed on 19 August 2024).
- NYC, O.D. Open Data of New York City. 2018. Available online: https://opendata.cityofnewyork.us/ (accessed on 19 August 2024).
- Ntakolia, C.; Platanitis, K.S.; Kladis, G.P.; Skliros, C.; Zagorianos, A.D. A Genetic Algorithm enhanced with Fuzzy-Logic for multi-objective Unmanned Aircraft Vehicle path planning missions. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 114–123. [Google Scholar] [CrossRef]
- Fortin, F.A.; De Rainville, F.M.; Gardner, M.A.; Parizeau, M.; Gagné, C. DEAP: Evolutionary Algorithms Made Easy. J. Mach. Learn. Res. 2012, 13, 2171–2175. [Google Scholar]
- Poli, R.; Langdon, W.B.; McPhee, N.F.; Koza, J.R. A Field Guide to Genetic Programming; Lulu Enterprises: Morrisville, NC, USA, 2008. [Google Scholar]
- Koza, J. On the programming of computers by means of natural selection. In Genetic Programming; Bradford Books: London, UK, 1992. [Google Scholar]
- Kotze, A. andre-kotze/gp-trajec: GP-Trajec 3D. 2023. Available online: https://zenodo.org/records/7824962 (accessed on 19 August 2024).
- Whigham, P.A.; Dick, G. Implicitly controlling bloat in genetic programming. IEEE Trans. Evol. Comput. 2009, 14, 173–190. [Google Scholar] [CrossRef]
- Poli, R.; McPhee, N.F.; Vanneschi, L. Analysis of the Effects of Elitism on Bloat in Linear and Tree-based Genetic Programming. In Genetic Programming Theory and Practice VI; Springer: Berlin, Germany, 2008; pp. 1–20. [Google Scholar]
- Real, L.C.V.; Silva, B.; Meliksetian, D.S.; Sacchi, K. Large-scale 3D geospatial processing made possible. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019; pp. 199–208. [Google Scholar]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Tedrake, R. Underactuated Robotics. Course Notes for MIT 6.832. 2023. Available online: https://underactuated.csail.mit.edu/ (accessed on 19 August 2024).
- Marcucci, T.; Petersen, M.; von Wrangel, D.; Tedrake, R. Motion planning around obstacles with convex optimization. arXiv 2022, arXiv:2205.04422. [Google Scholar] [CrossRef] [PubMed]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Alves, N.; Ferreira, M.A.S.; Colombini, E.L.; Da Silva Simoes, A. An Evolutionary Algorithm for Quadcopter Trajectory Optimization in Aerial Challenges. In Proceedings of the 2020 Latin American Robotics Symposium (LARS), 2020 Brazilian Symposium on Robotics (SBR) and 2020 Workshop on Robotics in Education (WRE), Natal, Brazil, 9–13 November 2020. [Google Scholar]
- Neeraj; Kumar, A. Efficient hierarchical hybrids parallel genetic algorithm for shortest path routing. In Proceedings of the 2014 5th International Conference-Confluence the Next Generation Information Technology Summit (Confluence), Noida, India, 25–26 September 2014; pp. 257–261. [Google Scholar]
- Rath, A.K.; Parhi, D.R.; Das, H.C.; Kumar, P.B.; Muni, M.K.; Salony, K. Path optimization for navigation of a humanoid robot using hybridized fuzzy-genetic algorithm. Int. J. Intell. Unmanned Syst. 2019, 7, 112–119. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Syst. Rev. 2021, 10, 1–11. [Google Scholar] [CrossRef] [PubMed]
- García, A.E.; González, H.E.; Schupke, D. Hybrid Route Optimisation for Maximum Air to Ground Channel Quality. J. Intell. Robot. Syst. Theory Appl. 2022, 105, 31. [Google Scholar] [CrossRef]
- Balogun, A.L.; Matori, A.N.; Hamid-Mosaku, A.I.; Umar Lawal, D.; Ahmed Chandio, I. Fuzzy MCDM-based GIS model for subsea oil pipeline route optimization: An integrated approach. Mar. Georesources Geotechnol. 2017, 35, 961–969. [Google Scholar] [CrossRef]
- Pérez-Cutiño, M.A.; Rodríguez, F.; Pascual, L.D.; Díaz-Báñez, J.M. Ornithopter Trajectory Optimization with Neural Networks and Random Forest. J. Intell. Robot. Syst. Theory Appl. 2022, 105, 17. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Brintaki, A.N. Coordinated UAV path planning using differential evolution. In Proceedings of the 2005 IEEE International Symposium on Mediterrean Conference on Control and Automation Intelligent Control, Limassol, Cyprus, 27–29 June 2005; pp. 549–556. [Google Scholar]
- Poli, R.; McPhee, N.F.; Vanneschi, L. Elitism reduces bloat in genetic programming. In Proceedings of the 10th Annual Conference on Genetic and Evolutionary Computation, Atlanta, GA, USA, 12–16 July 2008; pp. 1343–1344. [Google Scholar]
- Luke, S.; Panait, L. Fighting bloat with nonparametric parsimony pressure. In Proceedings of the International Conference on Parallel Problem Solving from Nature, Granada, Spain, 7–11 September 2002; Springer: Berlin, Germany, 2002; pp. 411–421. [Google Scholar]
- Mansur, V.; Reddy, S.; Sujatha, R.; Sujatha, R. Deploying Complementary filter to avert gimbal lock in drones using Quaternion angles. In Proceedings of the 2020 IEEE International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 2–4 October 2020; pp. 751–756. [Google Scholar]
- Huynh, D.Q. Metrics for 3D rotations: Comparison and analysis. J. Math. Imaging Vis. 2009, 35, 155–164. [Google Scholar] [CrossRef]













| Strategy | Generations | Duration (seconds) |
|---|---|---|
| GA [23] | 15 | 16,440 |
| GP (this paper) | 15 | 11.7 |
| Scenario | dem | ngen | end | pop_size | cxpb | mutpb | hof_size | Optimum | Duration (s) |
|---|---|---|---|---|---|---|---|---|---|
| Clove Lakes i to e | no | 400 | 44 | 1000 | 0.5 | 0.02 | 20 | 4555.25 | 10.09 |
| Clove Lakes i to e | no | 400 | 85 | 1000 | 0.5 | 0.1 | 20 | 4505.02 | 25.74 |
| Clove Lakes i to e | no | 400 | 400 | 1000 | 0.5 | 0.5 | 20 | 4445.51 | 321.29 |
| Clove Lakes i to e | no | 400 | 57 | 1000 | 0.1 | 0.1 | 20 | 4746.49 | 6.21 |
| Clove Lakes i to e | no | 400 | 134 | 1000 | 0.9 | 0.1 | 20 | 4488.21 | 89.27 |
| Cunningham Park | no | 1000 | 52 | 100 | 0.5 | 0.1 | 2 | 15,502.89 | 29.33 |
| Cunningham Park | no | 1000 | 646 | 1000 | 0.5 | 0.1 | 20 | 12,346.46 | 478.06 |
| Cunningham Park | no | 1000 | 905 | 10,000 | 0.5 | 0.1 | 200 | 6768.44 | 736.87 |
| Cunningham Park | no | 1000 | 332 | 100 | 0.75 | 0.25 | 10 | 12,507.67 | 442.04 |
| Cunningham Park | no | 1000 | 650 | 1000 | 0.75 | 0.25 | 100 | 12,749.04 | 790.16 |
| Cunningham Park | no | 1000 | 1000 | 10,000 | 0.75 | 0.25 | 1000 | 12,453.76 | 620.23 |
| Porto G to R | no | 250 | 76 | 500 | 0.9 | 0.5 | 10 | 1222.9 | 27.77 |
| Porto G to R | yes | 250 | 250 | 500 | 0.9 | 0.5 | 10 | 1197.17 | 739.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotze, A.; Hildemann, M.J.; Santos, V.; Granell, C. Genetic Programming to Optimize 3D Trajectories. ISPRS Int. J. Geo-Inf. 2024, 13, 295. https://doi.org/10.3390/ijgi13080295
Kotze A, Hildemann MJ, Santos V, Granell C. Genetic Programming to Optimize 3D Trajectories. ISPRS International Journal of Geo-Information. 2024; 13(8):295. https://doi.org/10.3390/ijgi13080295
Chicago/Turabian StyleKotze, André, Moritz Jan Hildemann, Vítor Santos, and Carlos Granell. 2024. "Genetic Programming to Optimize 3D Trajectories" ISPRS International Journal of Geo-Information 13, no. 8: 295. https://doi.org/10.3390/ijgi13080295
APA StyleKotze, A., Hildemann, M. J., Santos, V., & Granell, C. (2024). Genetic Programming to Optimize 3D Trajectories. ISPRS International Journal of Geo-Information, 13(8), 295. https://doi.org/10.3390/ijgi13080295