
Point Cluster Analysis Using a 3D Voronoi Diagram with Applications in Point Cloud Segmentation


Abstract
:1. Introduction and Literature Review
2. Three-Dimensional Voronoi-Based Analysis
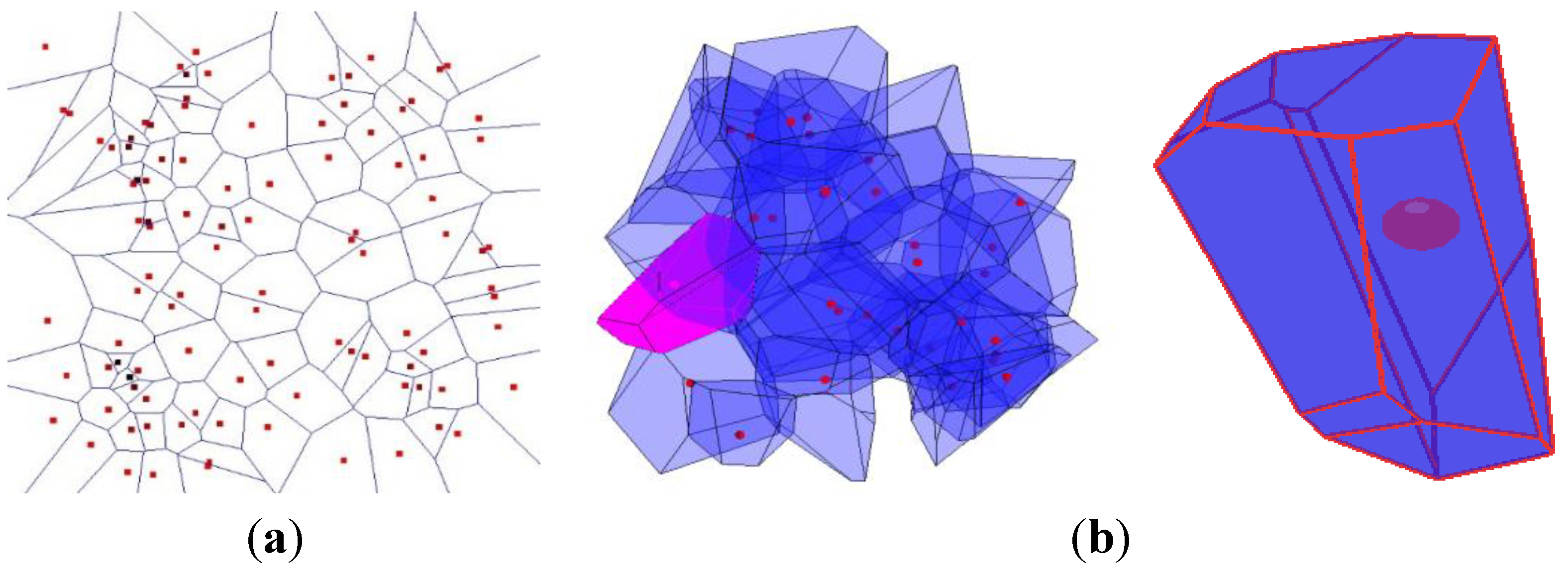
2.1. Definition and Description of 3D Voronoi Diagram


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Note |
|---|---|---|
| Particle | The generating point | 3D coordinate |
| ID | Identifier of the Voronoi cell | Integral number |
| Facet # | The number of facets of the given Voronoi cell | Degree that indicates the number of spatial neighbors |
| Surface area | Surface area of the given Voronoi cell | Related to tension and density |
| Volume | Volume of the given Voronoi cell | Related to tension and density |
| 1-order neighbors | Direct neighbors of the given cell | The cells share facets with the given cell |
| Depth | Depth of N-order neighbors of the given cell | Globe depth of multiple order neighbors in 3D Voronoi diagram or within a cluster |

2.2. Spatial Neighborhood Relationships of 3D Voronoi Cells

| n-order | Particle ID | Number of Neighbors |
|---|---|---|
| 1 | 94,88,46,23,16,45,72,4,50,61 | 10 |
| 2 | 7,92,84,68,82,80,30,8,93,57,18,81,90,9,12,19,59,13,98,79,75,3,99,41,2,44,65,97,55,91,62,32,87 | 34 |
| 3 | 70,67,52,64,11,53,36,0,96,73,21,27,5,40,95,39,25,35,34,17,14,56,49,51,28,38,31,10,6,24,78,76,85,63,1,89,69,29,77,20 | 40 |
| 4 | 26,37,42,58,74,22,60,71,83,43,66,15,48,86,54,47 | 10 |
2.3. Measurements in the Voronoi Method
Importance Value
Spatial Neighborhood Relationship
Particle Statistics
Depth of the Cluster
3. Point Cluster Analysis Using the 3D Voronoi Diagram and Applications in Point Cloud Segmentation
3.1. Method Procedures
- (1)
- Construct the 3D Voronoi diagram of a 3D point cloud;
- (2)
- Compute the parameters of each 3D Voronoi cell and its neighbor cells; and
- (3)
- Cluster 3D points with a given number of clusters by hierarchical cluster and Voronoi parameters (Section 3.2).
3.2. Random Point Cluster Analysis Based on 3D Voronoi Diagrams




3.3. Applications in Point Cloud Segmentation of 3D Models


| Number of Clusters | Number of 3D Points | Max. Depth of Cluster | Body Components |
|---|---|---|---|
| 1 | 2483 | 12 | Body |
| 2 | 1234 | 12 | Half front body |
| 1249 | 11 | Half rear body | |
| 3 | 683 | 10 | Head and neck |
| 566 | 10 | Front leg | |
| 1234 | 12 | Half rear body | |
| 4 | 683 | 10 | Head and neck |
| 566 | 10 | Front leg | |
| 226 | 8 | Rear feet | |
| 1008 | 9 | Half rear body | |
| 5 | 279 | 8 | Withers |
| 566 | 9 | Front leg | |
| 226 | 8 | Rear feet | |
| 1008 | 9 | Half rear body | |
| 404 | 8 | Head | |
| 6 | 279 | 8 | Withers |
| 566 | 9 | Front leg | |
| 226 | 8 | Rear feet | |
| 676 | 9 | Crupper | |
| 332 | 9 | Horseback | |
| 404 | 8 | Head | |
| 8 | 279 | 8 | Withers |
| 169 | 8 | Front feet | |
| 226 | 8 | Rear feet | |
| 397 | 9 | Front leg | |
| 676 | 9 | Crupper | |
| 160 | 8 | Horseback | |
| 172 | 8 | Belly | |
| 404 | 8 | Head |
| 3D Model (# Point) | Cluster Number (Parts of 3D Models) | ||||
|---|---|---|---|---|---|
| 2 | 3 | 4 | 5 | 6 | |
| Fish 2366 |  |  |  |  |  |
| Armadillo 2742 |  |  |  |  |  |
| Deer 3033 |  |  |  |  |  |
| Camel 2443 |  |  |  |  |  |
| Elephant 2775 |  |  |  |  |  |
| Hand 1055 |  |  |  |  |  |
3.4. Discussion
4. Conclusion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Panko, E.; Flin, P. Application of the Voronoi tessellation technique for galaxy cluster search in the Münster Red Sky Survey. Proc. Int. Astron. Union Colloq. 2004, 2004, 245–247. [Google Scholar] [CrossRef]
- Ramella, M.; Boschin, W.; Fadda, D.; Nonino, M. Finding galaxy clusters using Voronoi tessellations. Astron. Astrophys. 2001, 368, 776–786. [Google Scholar] [CrossRef]
- Elyiv, A.; Melnyk, O.; Vavilova, I. High-order 3D Voronoi tessellation for identifying isolated galaxies, pairs and triplets. Mon. Not. R. Astron. Soc. 2009, 394, 1409–1418. [Google Scholar] [CrossRef]
- Dupuis, F.; Sadoc, J.F.; Mornon, J.P. Protein secondary structure assignment through Voronoi tessellation. Proteins. 2004, 55, 519–528. [Google Scholar] [CrossRef] [PubMed]
- Dupuis, F.; Sadoc, J.F.; Jullien, R.; Angelov, B.; Mornon, J.P. Voro3D: 3D Voronoi tessellations applied to protein structures. Bioinform. 2005, 21, 1715–1716. [Google Scholar] [CrossRef] [PubMed]
- Gatrell, A.C.; Bailey, T.C.; Diggle, P.J.; Rowlingson, B.S. Spatial point pattern analysis and its application in geographical epidemiology. T. I. Brit. Geogr. 1996, 21, 256–274. [Google Scholar] [CrossRef]
- Ledoux, H.; Gold, C.M. Modelling three-dimensional geoscientific Fields with the Voronoi diagram and its Dual. Int. J. Geogr. Inf. Sci. 2008, 22, 547–574. [Google Scholar] [CrossRef]
- Van der Putte, T.; Ledoux, H. Modelling three-dimensional geoscientific datasets with the discrete Voronoi Diagram. In Advances in 3D Geo-Information Sciences, Lecture Notes in Geoinformation and Cartography; Kolbe, T.H., Köning, G., Nagel, C., Eds.; Springer-Verlag: Berlin, Germany, 2011; pp. 227–242. [Google Scholar]
- Pellerin, J.; Caumon, G.; Julio, C.; Mejia-Herrera, P.; Botella, A. Elements for measuring the complexity of 3D structural models: Connectivity and geometry. Comput. Geosci. 2015, 76, 130–140. [Google Scholar] [CrossRef] [Green Version]
- Lopreore, C.L.; Bartol, T.M.; Coggan, J.S.; Keller, D.X.; Sosinsky, G.E.; Ellisman, M.H.; Sejnowski, T.J. Computational modeling of three-dimensional electrodiffusion in biological systems: application to the node of ranvier. Biophys. J. 2008, 95, 2624–2635. [Google Scholar] [CrossRef] [PubMed]
- Jiang, W.; Xu, K.; Cheng, Z.Q.; Martin, R.R.; Dang, G. Curve skeleton extraction by coupled graph contraction and surface clustering. Graph. Models. 2013, 75, 137–148. [Google Scholar] [CrossRef]
- Widder, E.A.; Johnsen, S. 3D Spatial point patterns of bioluminescent plankton: A map of the “minefield”. J. Plankton. Res. 2000, 22, 409–420. [Google Scholar] [CrossRef]
- Friedrich, E. The Voronoi Diagram in Structural Optimisation. Master’s thesis, University College London, 2008. [Google Scholar]
- Yan, H.W.; Weibel, R. An algorithm for point cluster generalization based on the Voronoi diagram. Comput Geosci 2008, 34, 939–954. [Google Scholar] [CrossRef]
- Mandal, D.A.; Treas, H.E. Parallel processing a three-dimensional free-Lagrange code: A case history. Int. J. High. Perform. C. 1989, 3, 92–99. [Google Scholar] [CrossRef]
- Ledoux, H. Modelling Three-Dimensional Fields in Geoscience with the Voronoi Diagram and its Dual. Ph.D. Thesis, University of Glamorgan, 2006. [Google Scholar]
- Dong, P. Lacunarity analysis of raster datasets and 1D, 2D and 3D point patterns. Comput Geosci. 2009, 35, 2100–2110. [Google Scholar] [CrossRef]
- Hashemi Beni, L.; Mostafavi, M.A.; Pouliot, J.; Gavrilova, M. Toward 3D spatial dynamic field simulation within GIS using kinetic Voronoi diagram and Delaunay tetrahedralization. Int. J. Geogr. Inf. Sci. 2011, 25, 25–50. [Google Scholar] [CrossRef]
- Wei, Y.; Cotin, S.; Allard, J.; Fang, L.; Pan, C.; Ma, S. Interactive blood-coil simulation in real-time during aneurysm embolization. Comput. Graph. 2011, 35, 422–430. [Google Scholar] [CrossRef] [Green Version]
- Rosenthal, P.; Linsen, L. Enclosing surfaces for point clusters using 3D discrete Voronoi Diagrams. Comput. Graph. Forum. 2009, 28, 999–1006. [Google Scholar] [CrossRef]
- Mongrain, J.; Larsen, J. Spatial point pattern analysis applied to bubble nucleation in silicate melts. Comput. Geosci. 2009, 35, 1917–1924. [Google Scholar] [CrossRef]
- Han, J.; Kamber, M.; Tung, A. Spatial clustering methods in data mining: A survey. Geogr. Data Min. Knowl. Discov. Taylor Fr. 2001, 188–217. [Google Scholar]
- Mamou, K.; Ghorbel, F. A simple and efficient approach for 3D mesh approximate convex decomposition. In IEEE International Conference on Image Processing, Cairo, Egypt, 7–10 November 2009; pp. 3501–3504.
- Yang, B.S.; Zhang, Y.F. Automated registration of dense terrestrial laser-scanning point clouds using curves. ISPRS. J. Photogramm. Remote Sens. 2014, 95, 109–121. [Google Scholar] [CrossRef]
- Shamir, A. A survey on mesh segmentation techniques. Comput. Graph. Forum. 2008, 27, 1539–1556. [Google Scholar] [CrossRef]
- Hu, R.Z.; Fan, L.B.; Liu, L.G. Co-segmentation of 3D shapes via subspace clustering. Comput. Graph. Forum. 2012, 31, 1703–1713. [Google Scholar] [CrossRef]
- Liu, Z.B.; Tang, S.C.; Bu, S.H.; Zhang, H. New evaluation metrics for mesh segmentation. Comput. Graph. 2013, 37, 553–564. [Google Scholar] [CrossRef]
- Liu, X.P.; Zhang, J.; Liu, R.S.; Li, B.; Wang, J.; Gao, J.J. Low-rank 3D mesh segmentation and labeling with structure guiding. Comput. Graph. 2015, 46, 99–109. [Google Scholar] [CrossRef]
- Boada, I.; Coll, N.; Madern, N.; Sellares, J.A. Approximations of 2D and 3D generalized Voronoi diagrams. Int. J. Comput. Math. 2008, 85, 1003–1022. [Google Scholar] [CrossRef]
- Okabe, A.; Boots, B.; Sugihara, K.; Chiu, S. Spatial Tessellations: Concepts and Applications of Voronoi Diagrams; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Ryu, J.; Kim, D.; Cho, Y.; Park, R.; Kim, D.S. Computation of molecular surface using Euclidean Voronoi Diagram. Comput. Des. Appl. 2005, 2, 439–448. [Google Scholar]
- Hsieh, H.; Tai, W. A simple GPU-based approach for 3D Voronoi diagram construction and visualization. Simul. Model. Pract. Th. 2005, 13, 681–692. [Google Scholar] [CrossRef]
- Costa, L.F. Voronoi and fractal complex networks and their characterization. Int. J. Mod. Phys. C 2004, 15, 175–183. [Google Scholar] [CrossRef]
- Borovkov, K.; Odell, D. Simulation studies of some Voronoi point processes. Acta. Appl. Math. 2007, 96, 87–97. [Google Scholar] [CrossRef]
- Pizarro, D.; Campusano, L.E.; Clowes, R.G.; Virgili, P. Clustering of 3D spatial points using a maximum likelihood estimator over Voronoi Tessellations: Study of the galaxy distribution in redshift space. In Proceedings of the 3rd International Symposium on Voronoi Diagrams in Science and Engineering (ISVD’06), IEEE Computer Society, Banff, AB, Canada, 2–5 July 2006; pp. 112–121.
- Grau, S.; Verges, E.; Tost, D.; Ayala, D. Exploration of porous structures with illustrative visualizations. Comput. Geosci. 2011, 34, 398–408. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ying, S.; Xu, G.; Li, C.; Mao, Z. Point Cluster Analysis Using a 3D Voronoi Diagram with Applications in Point Cloud Segmentation. ISPRS Int. J. Geo-Inf. 2015, 4, 1480-1499. https://doi.org/10.3390/ijgi4031480
Ying S, Xu G, Li C, Mao Z. Point Cluster Analysis Using a 3D Voronoi Diagram with Applications in Point Cloud Segmentation. ISPRS International Journal of Geo-Information. 2015; 4(3):1480-1499. https://doi.org/10.3390/ijgi4031480
Chicago/Turabian StyleYing, Shen, Guang Xu, Chengpeng Li, and Zhengyuan Mao. 2015. "Point Cluster Analysis Using a 3D Voronoi Diagram with Applications in Point Cloud Segmentation" ISPRS International Journal of Geo-Information 4, no. 3: 1480-1499. https://doi.org/10.3390/ijgi4031480
APA StyleYing, S., Xu, G., Li, C., & Mao, Z. (2015). Point Cluster Analysis Using a 3D Voronoi Diagram with Applications in Point Cloud Segmentation. ISPRS International Journal of Geo-Information, 4(3), 1480-1499. https://doi.org/10.3390/ijgi4031480