1. Introduction
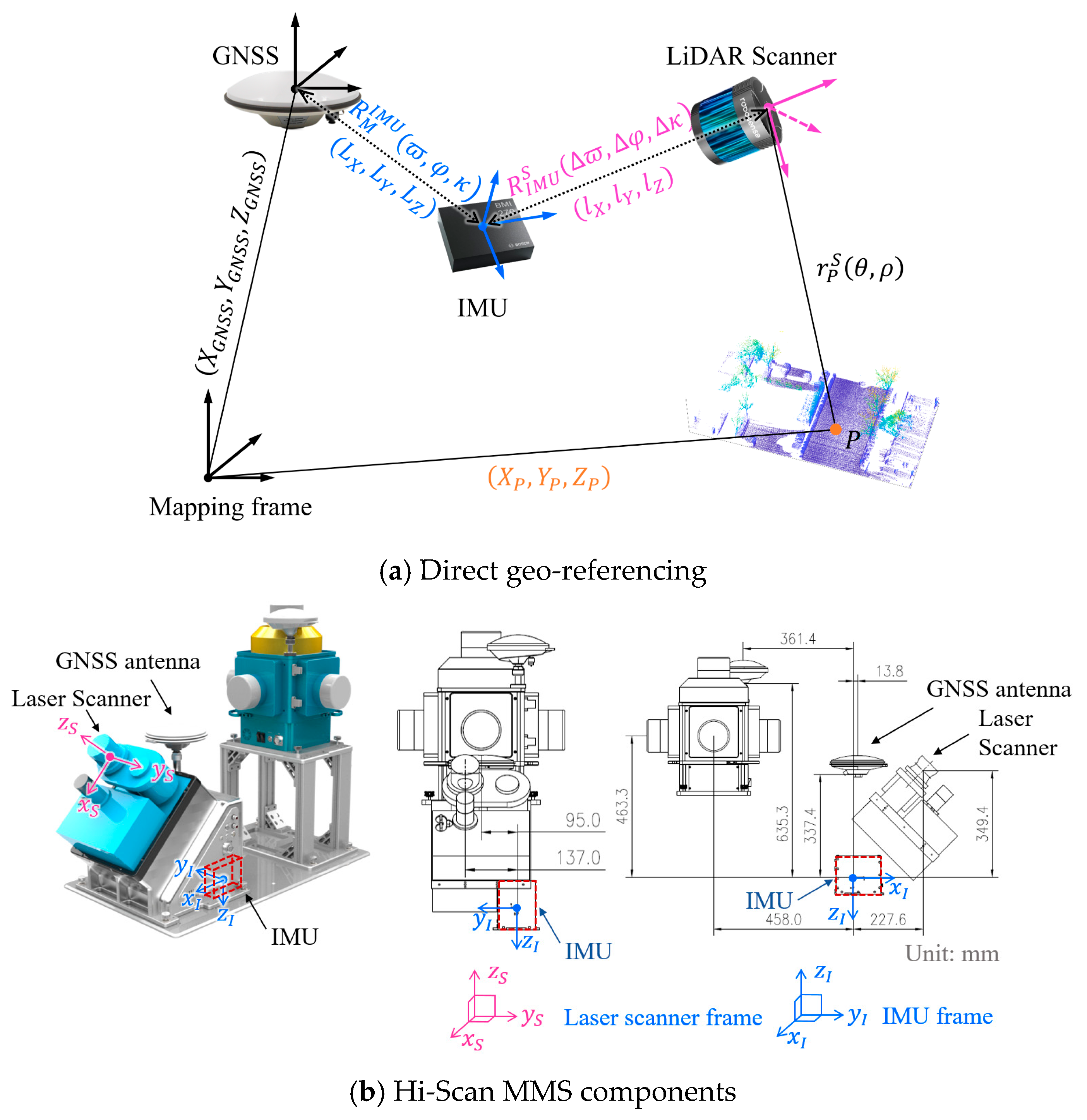
Mobile light detection and ranging (LiDAR) systems, also known as Mobile Mapping Systems (MMSs), are an emerging survey technology that enable quick and accurate depiction of real-world three-dimensional (3D) road environments in the form of dense point clouds. The LiDAR comprises the Global Navigation Satellite System (GNSS), Inertial Measurement Unit (IMU), and laser scanning system. Due to their realistic representation of real-life objects, mobile laser scanning (MLS) data provide an ideal virtual environment for various computerized estimations, in which dangerous and cumbersome field measurements, such as sight distance [
1], can be avoided. Moreover, rich information, such as intensity, scan angle, and trajectory of the inspection vehicle, is included in MLS data, which aids the recognition and segmentation of different objects. Given these remarkable advantages, MLS data have received ever-increasing attention from transportation researchers over the past years [
2].
Existing MLS data-based studies in road engineering can be generally categorized into three types: road-geometry feature extraction, road-surface condition assessment, and road-asset inventory [
3,
4,
5]. Though the specific objective of each category is different, the general concept of using MLS data is similar: that is, to automatically extract certain road information whose measurement is costly, time-consuming, and labor-intensive in the real-world.
Although MLS data have great potential in this area, its quality may be susceptible to missing point regions (MPR) [
6,
7]. As shown in
Figure 1, the beams emitted from the laser scanner may be obstructed by obstacles (either static or mobile) and thus creating MPR [
6]. These missing regions may cause severe information loss and data gaps. For instance, if road lamps completely fall within an MPR, they cannot be detected by algorithms, which causes an adverse effect on the inventory accuracy of road features. When objects are partially inside the MPR, the missing point issue may also increase the difficulty of object detection and segmentation [
7]. In some cases when the mobile obstacle is small or travels reversely in the direction of the measuring vehicle, the generated MPR may not cause substantial data gap (see the area marked in red in
Figure 1).
Whether an MPR causes non-negligible data gaps depends on its features (e.g., location, area, orientation). These features are associated with the obstacle attributes (e.g., position, dimension, speed of mobile vehicles in the traffic) at the time of capturing the points. Stationary obstructions are constantly fixed at their positions, so their impacts on MPR generation are relatively predictable. However, the traffic condition around the inspection vehicle at the data collection stage is hard to control, especially in busy cities, making the distribution of MPR along the road corridor difficult to predict. Therefore, it is meaningful to detect MPR in MLS data, which is a prerequisite for checking whether the road information loss (RIL) in the dataset is substantial.
Generally, detection of MPR on roads in MLS data involves two main steps: delineating the road area and segmenting MPR therein. Road area defines the search range for MPR while segmentation emphasizes MPR identification. In spite of the few studies that directly focus on detecting MPR, much attention in the literature was given to road-surface (or ground) extraction and road-boundary identification from MLS point clouds, both of which are related to road-area delineation.
Road-surface extraction is commonly a prerequisite for effective detection and classification of on-road objects in MLS data [
3,
4]. According to the review by Che et al. [
3], existing methods of organizing MLS data for road-surface extraction can be generally categorized into three types: (1) rasterization, (2) 3D point, and (3) scanline methods.
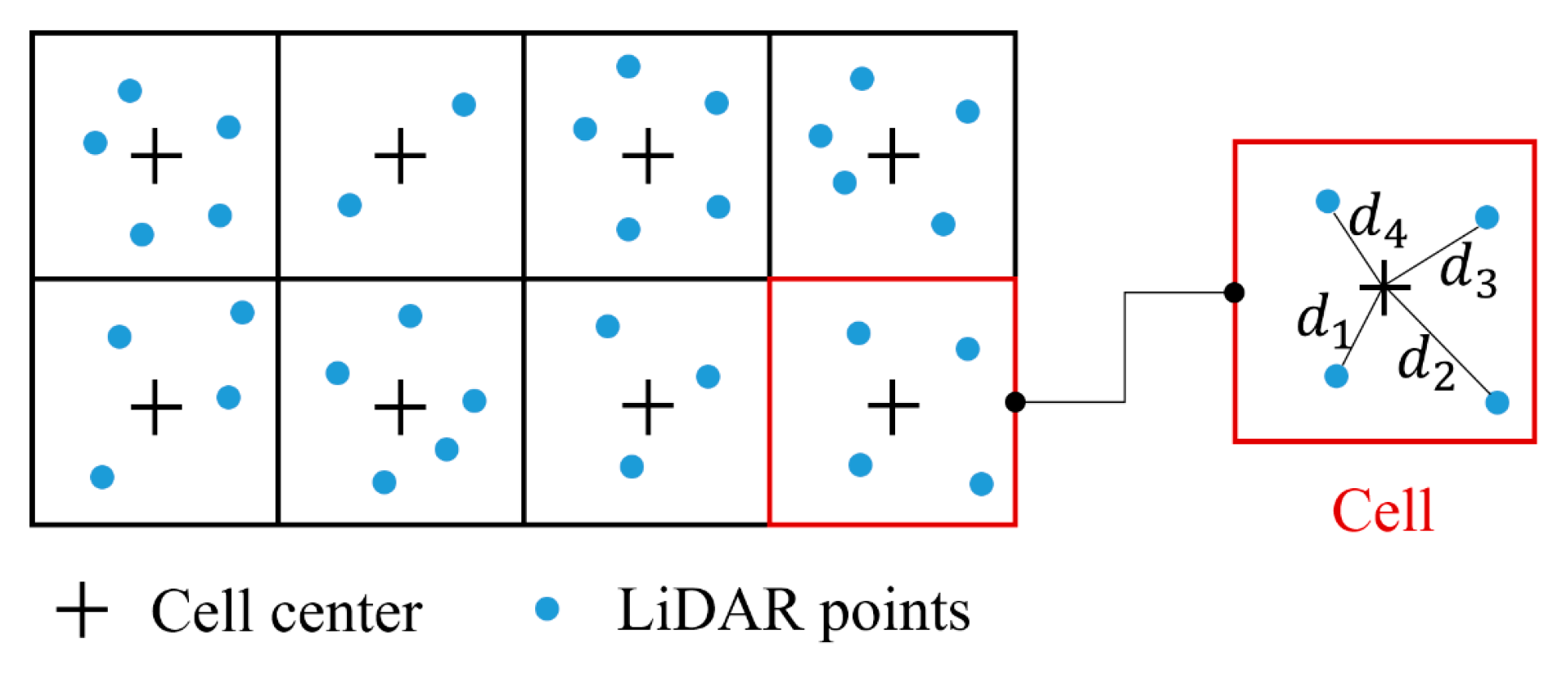
Rasterization methods organize point clouds onto an image with a user-defined pixel size. The quality of the generated image is closely associated with the pixel size. Large pixel size may cause several points to fall within the same pixel and thus causing a substantial loss of details, while small pixel results in intensive computations. In the case where several points fall within the same pixel, the pixel-value is commonly represented by four different parameters: (a) the maximum elevation, (b) the minimum elevation, (c) the elevation difference, and (d) the number of points inside the pixel [
8]. Assuming a planar segment as the road surface, rasterization methods use certain pixel-value difference as a threshold to segment surface from the generated image [
9,
10,
11].
Compared with rasterization methods, the 3D point-based approaches can preserve the 3D nature of MLS point clouds. Nevertheless, due to the large volume of MLS data and the complexity of 3D calculations, 3D point-based methods are usually computationally intensive [
3]. There exist various 3D point-based methods for ground filtering: (a) grid cell-based methods which partition points into grid cells and find points representing road surface in each cell [
12,
13,
14], (b) triangulated irregular networks (TIN)-based methods which construct TIN from MLS points and use the features related to triangle elements to segment road surface [
15,
16], and (c) density-based approaches which calculate the number of neighboring points around each point within certain range and use a specific density value as a threshold to distinguish non-ground from ground points [
17].
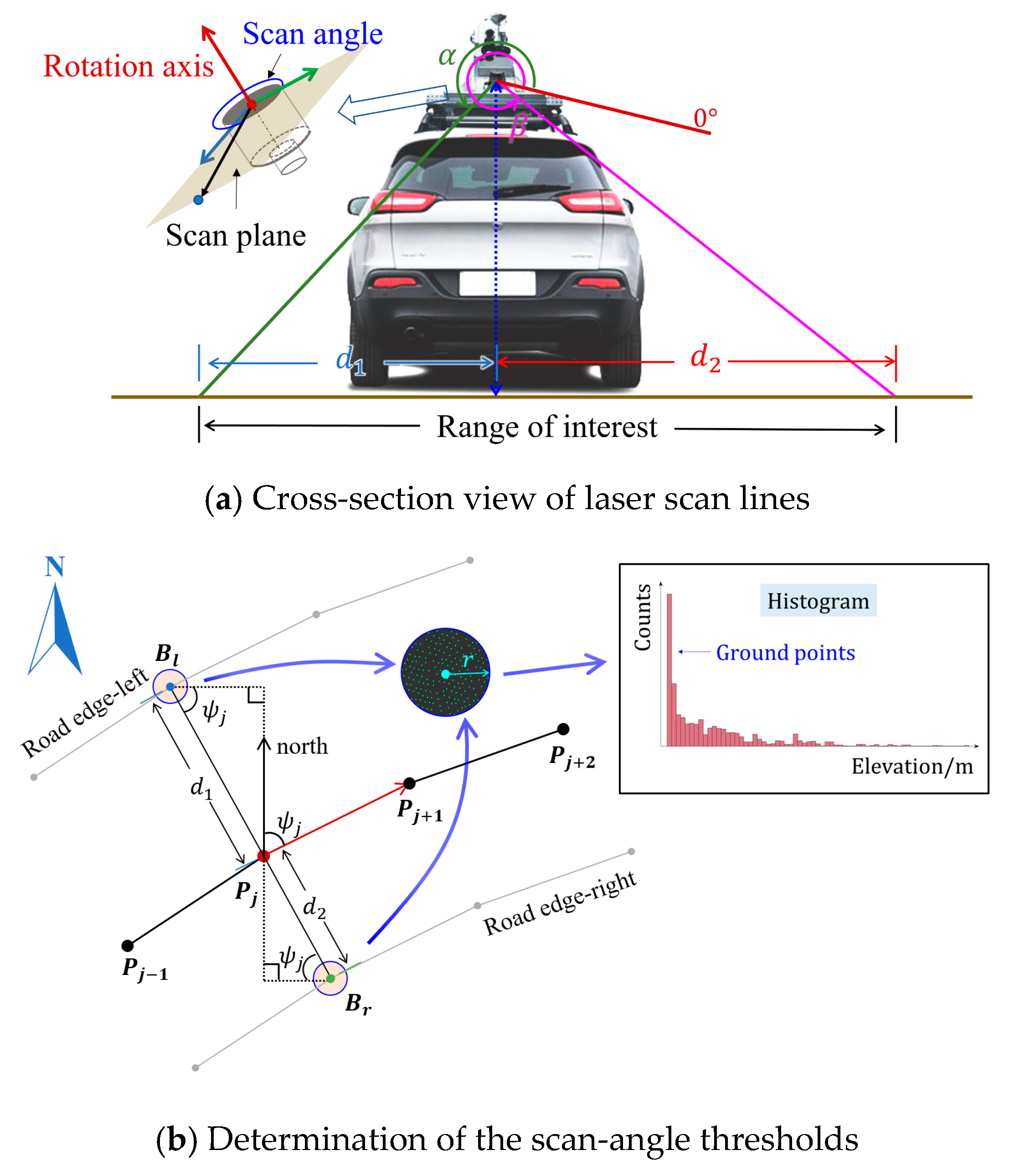
Both rasterization and 3D point-based methods partition MLS data into several vertical profiles. Unlike the preceding methods, the scanline methods first extract scanline profiles using the GPS time registered at the data collection stage. Then, in the scanning profile the road surface can be efficiently extracted using the scan angle and the height thresholds [
18,
19,
20]. Some studies slice the cross-section profiles that are perpendicular to the vehicle path in MLS data and then extract the road surface using similar rules to the scanline methods [
21,
22].
However, extracting the road surface points may not contribute to accurate MPR detection.
Figure 2 presents an example of a road surface extracted from highly noisy MLS data. As noted, due to the existence of MPR, it is a challenging task to recover the shape of the road corridor from the extracted road surface. In this case, the delineated road area would not be accurate.
Compared with ground filtering, more effort has been devoted in the literature to road boundary identification in MLS data [
23,
24,
25,
26,
27,
28]. However, the methods of organizing MLS data for identifying road boundaries are still similar to those of filtering ground points [
3]. Besides, most existing methods for road boundary detection assume that road edges are higher than the road surface, which may fail in situations where road curbs are unavailable [
12].
There are three main issues with respect to road area delineation using detected road boundaries in MLS data. First, as mentioned by Ma et al. [
4], the existence of vehicle noises may degrade the performance of existing methods for road edge/curb identification. Second, the missing point regions in MLS data may cause substantial discontinuity in the identified road edges [
6], which increases the difficulty in accurately delineating the road area. Third, some roadside features (e.g., road lamps) are located outside the road edges. In this case, only detecting MPR within the road boundaries cannot help determine whether such road features are missing in MLS data. Although the state-of-the-art methods may accurately extract road surface or detect road edges from MLS data, the severe MPR issue can make it challenging for those approaches to accurately delineate an ideal road area for MPR detection.
Despite the scarcity of studies that shed light on how to segment MPR from MLS data, some studies have recognized the MPR issue and proposed methods to automatically fill holes in the MLS point clouds. Hernández and Marcotegui [
9] treated holes of an image as sets of pixels whose minima are not connected to the image border. Then, they removed all minima which are not connected to the border using the morphological reconstruction by erosion. The algorithm operated on the entire image and did not segment any specific MPR. In addition, the hole-filling algorithm may omit some large MPR according to their test results [
9]. Doria and Radke [
29] combined concepts from patch-based image inpainting and gradient–domain image editing to fill hole-structures in LiDAR data. However, their method was only tested for some typical scenes and did not involve detection of MPR.
Currently, a method for automatic detection and estimation of MPR in MLS data is still lacking. To fill the gap, this study aims to propose a post-processing pipeline for automated detection and measurement of MPR within the road area in MLS point cloud. Detection refers to the identification of MPR in the dataset, while measurement refers to quantitatively estimating the morphological features of MPR. Both processes are indispensable to assessing the extent of RIL in MLS data.
The following parts are structured as follows:
Section 2 presents the material and method section which describes the MLS datasets used in this study and the MMS for collecting the data.
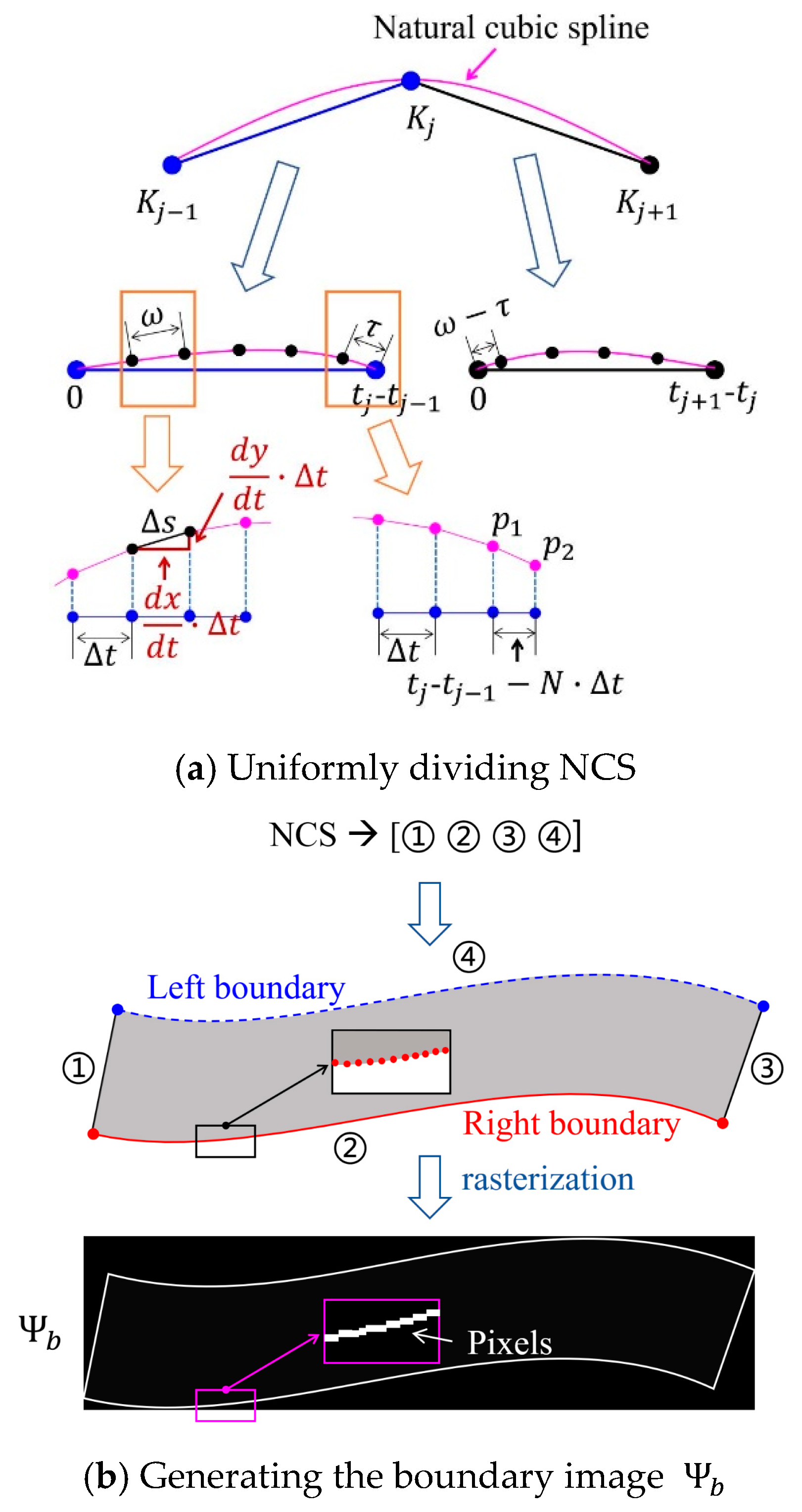
Section 3 presents the algorithm description section which elaborates on the method developed for detecting MPR in MLS point cloud.
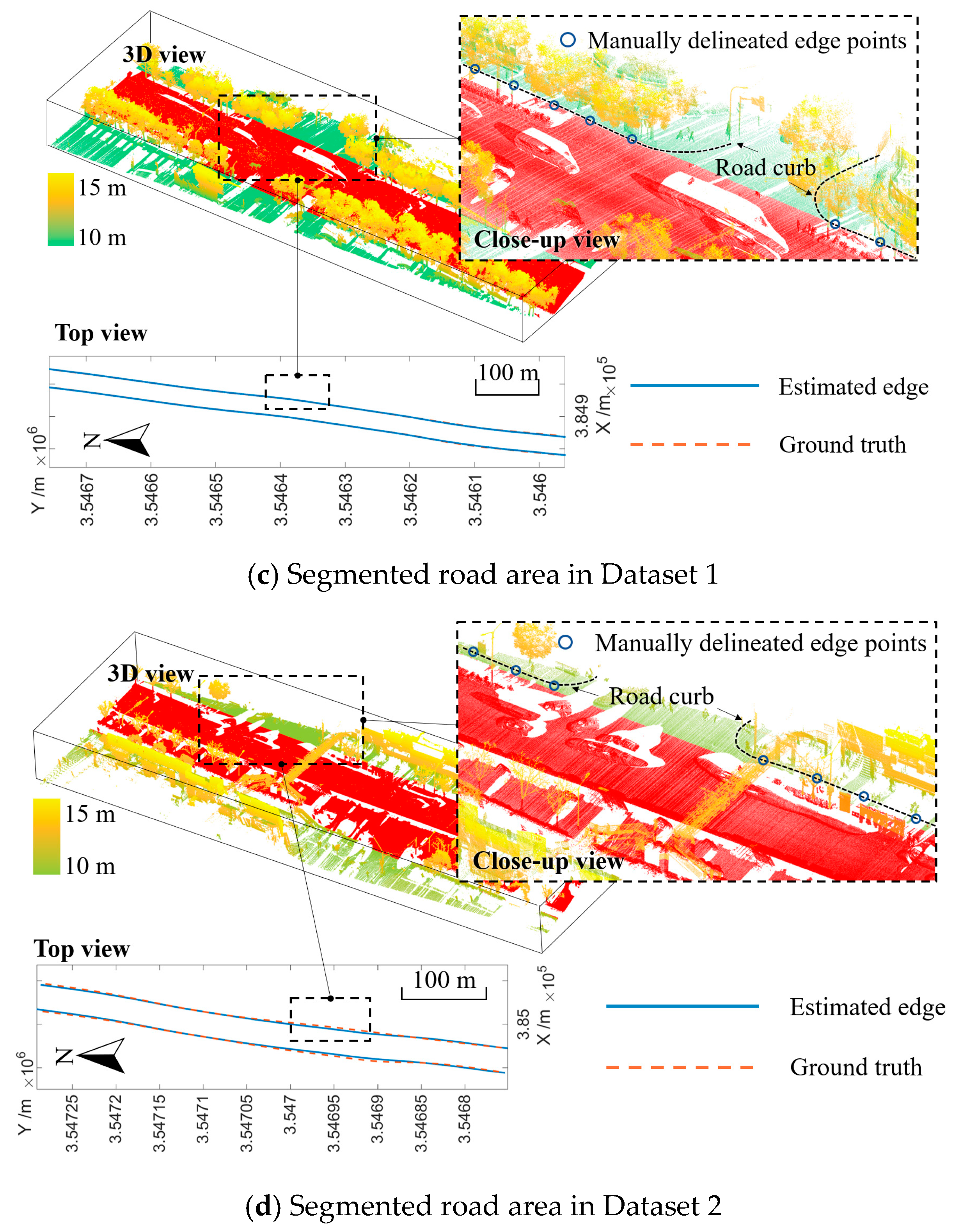
Section 4 presents an application where the developed method was used to detect MPR in two MLS datasets. Finally,
Section 5 presents our conclusions and the study limitations.
5. Concluding Remarks
This paper has proposed a solution for automated detection and measurement of road’s missing point regions in mobile laser scanning data. The effectiveness of the method was demonstrated using tests on two MLS datasets. The results show that the method can identify and locate MPR correctly within ROI. In addition, five properties of MPR were quantitatively measured and developed into graphics using the proposed approach, which helps better understand morphological features of MPR and paves the way for future investigation into how MPR features are related to the RIL issue. The ANOVA tests suggest that there is an optimal ε-value regarding detection of MPR in MLS data using the proposed approach.
Some issues remain to be addressed in future research. The developed approach relies on vehicle trajectory data. In this study, the measuring vehicle traces the road axis carefully by remaining in the same lane during data collection, but there is a possibility that the vehicle must shift to another lane for turning or passing maneuvers. In these cases, the extracted ROI may not be exactly the road area. Further research to estimate the adverse effect of using vehicle path as a substitute for the road axis is needed. Also, the proposed method extracted the road area from the MLS point cloud using the scan-angle thresholds, while in some MMS, more than one laser scanners are used (e.g., Trimble MX-9), which may degrade the accuracy of the extracted road area. A more robust method for delineating the road area in MLS data for MPR detections is expected to be developed in the future.
As previously mentioned, the detection of MPR in MLS data is a first step for investigating the relationship between MPR properties and RIL. Although the RIL issue can be estimated by determining whether important road features fall inside MPR in some contexts, when the road furniture data are missing or road information concerned is a parameter (e.g., road curve radius), such an estimation is impracticable. Therefore, it is meaningful to find the specific parameters that can serve as effective indicators of RIL in future research. This would help to directly determine from MPR parameters whether RIL is significant.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















