Embracing Crowdsensing: An Enhanced Mobile Sensing Solution for Road Anomaly Detection

 ,
,  , and
, and
Abstract
1. Introduction
1.1. Related Studies
1.2. Knowledge Gaps
- Existing detection methods have apparent limitations. Threshold-based methods need extensive empirical studies to obtain high-reliable thresholds. However, these thresholds mostly need to be adjusted and even re-tested when applied in different locations, which, in turn, significantly limits the repeatability of threshold-based methods. Machine learning methods usually require an extensive model training process based on a vast amount of labeled data, which is laborious and time-consuming. Utilizing wavelet transform (WT) can be more efficient to analyze mobile sensed data; however, integrating WT into road anomaly detection is still at a preliminary stage. To date, only a few studies reported on the utilization of discrete WT. The implementation of continuous wavelet transform (CWT) is still underexplored.
- Pothole size estimation is lacking. Most existing studies focus only on identifying and locating potholes; however, few studies investigate how to estimate potholes’ size using mobile sensed data. The damages caused by potholes vary by their sizes. Patching a pothole can cost about $35 to $50 U.S. dollars. Therefore, accurate and timely pothole size estimation is of great importance, which can help local governments allocate budget to fix hazardous potholes wisely.
- Prior crowdsourcing solutions are too simple to synthesize public contributed results efficiently. How to leverage crowd sensed data to achieve a better road anomaly detection is still an underexplored question. Currently, only a few studies have attempted to address this question with some simple crowdsensing strategies (e.g., average the crowd sensed data). However, these studies cannot effectively integrate public contributions to optimize the detection result.
1.3. Solution and New Contributions
- Implement a new method. To the best of our knowledge, this study marks the first attempt to test the performance of CWT in road anomaly detection.
- Provide a solution for pothole size estimation. Pothole size estimation plays an important role in road surface management; however, it has not been considered in prior studies. This study uses an innovative wavelet-based approach to extract size information for road surface anomalies, which is a new solution to an existing problem.
- Put forward an enhanced mobile sensing approach. There are some drawbacks associated with the crowd sensed data, such as data inaccuracy and redundancy. This study is among the first to investigate how to optimize road anomaly detection results by spatially clustering different driving tests’ detection results. Implement a new method. To the best of our knowledge, this study marks the first attempt to test the performance of CWT in road anomaly detection.
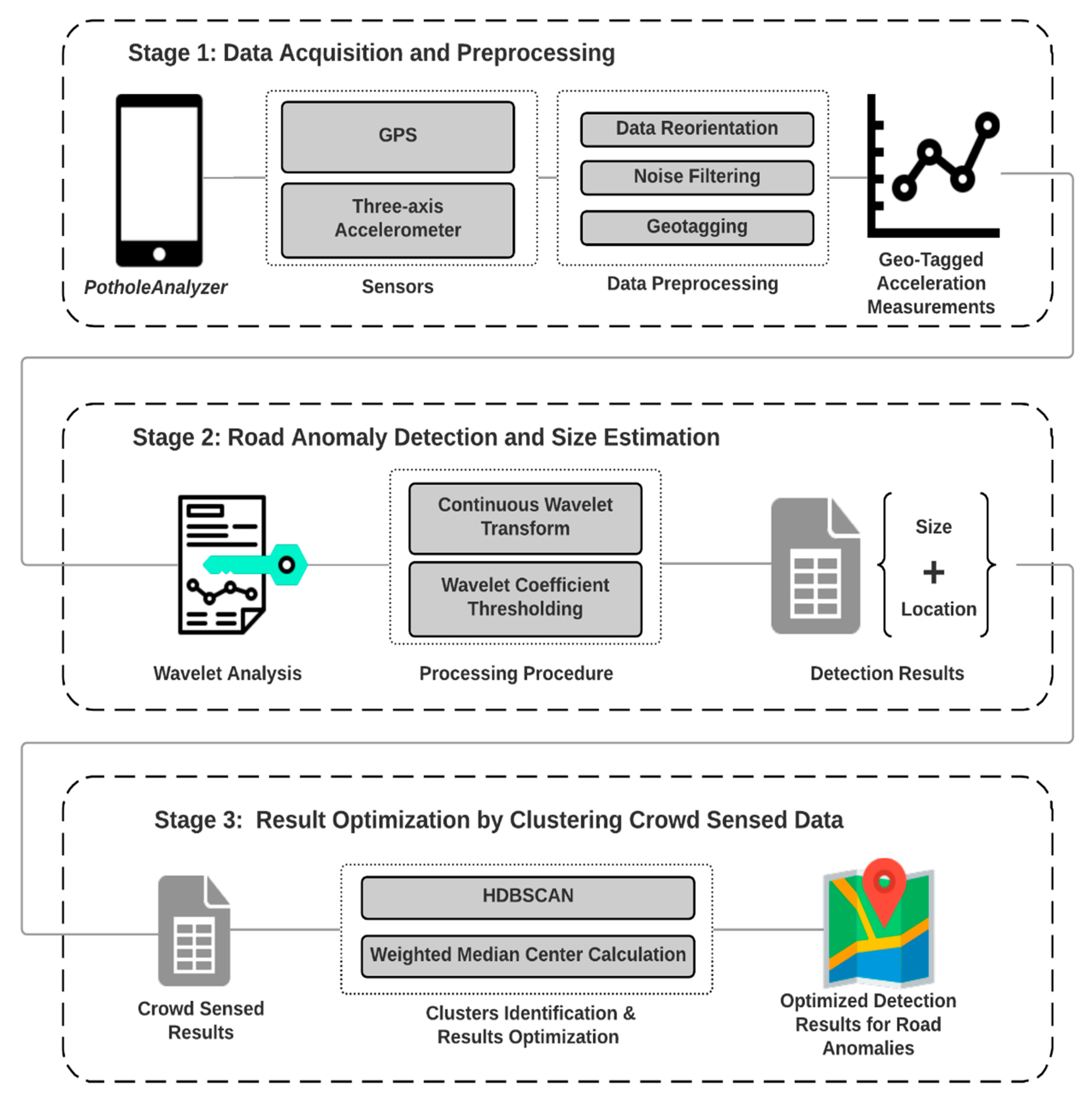
2. Methods
2.1. Data Acquisition and Preprocessing
2.1.1. Mobile Sensor Data Collection
2.1.2. Data Reorientation
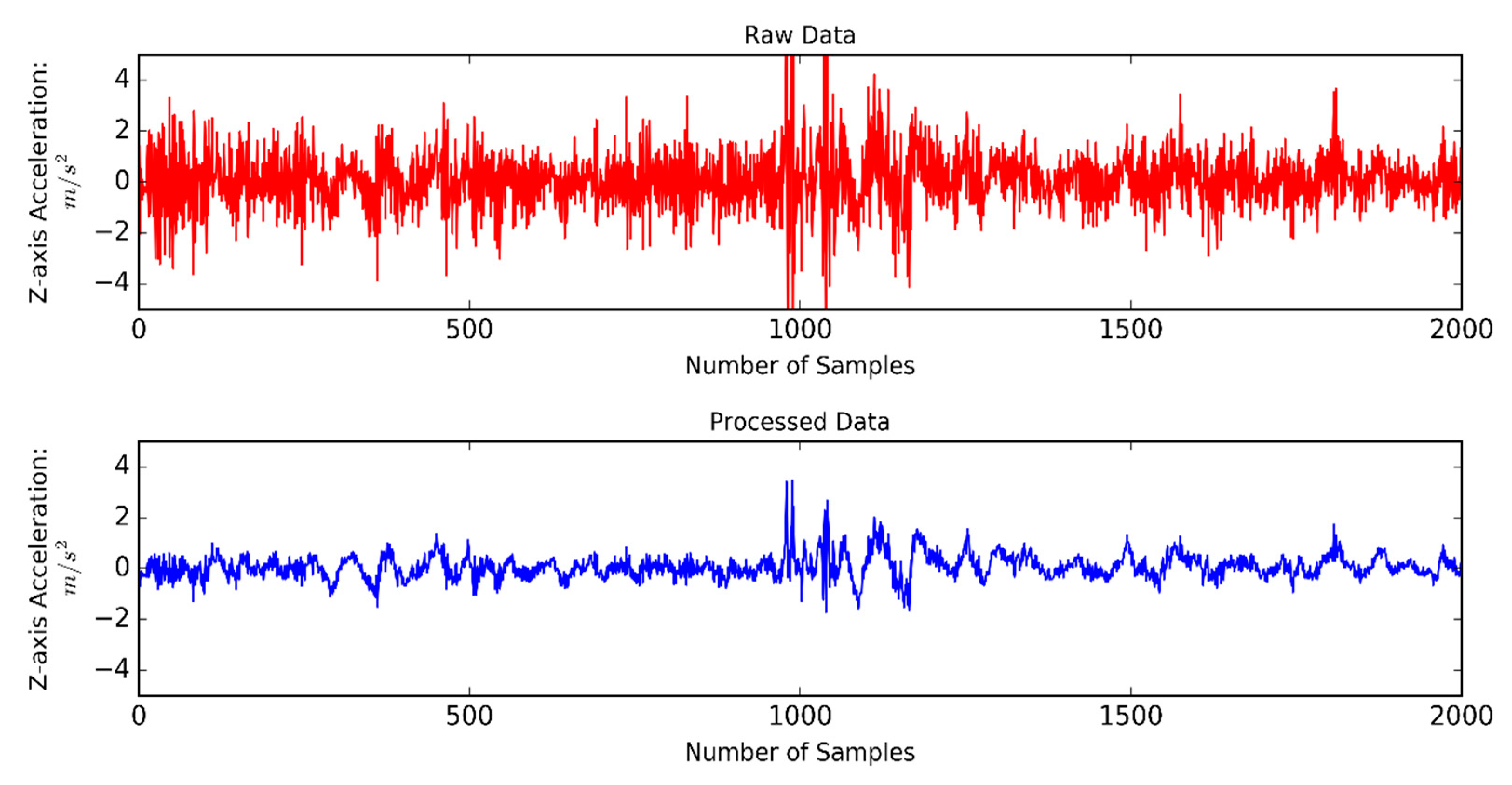
2.1.3. Data Smoothing
2.1.4. Geotagging
2.2. Road Anomaly Detection and Size Estimation
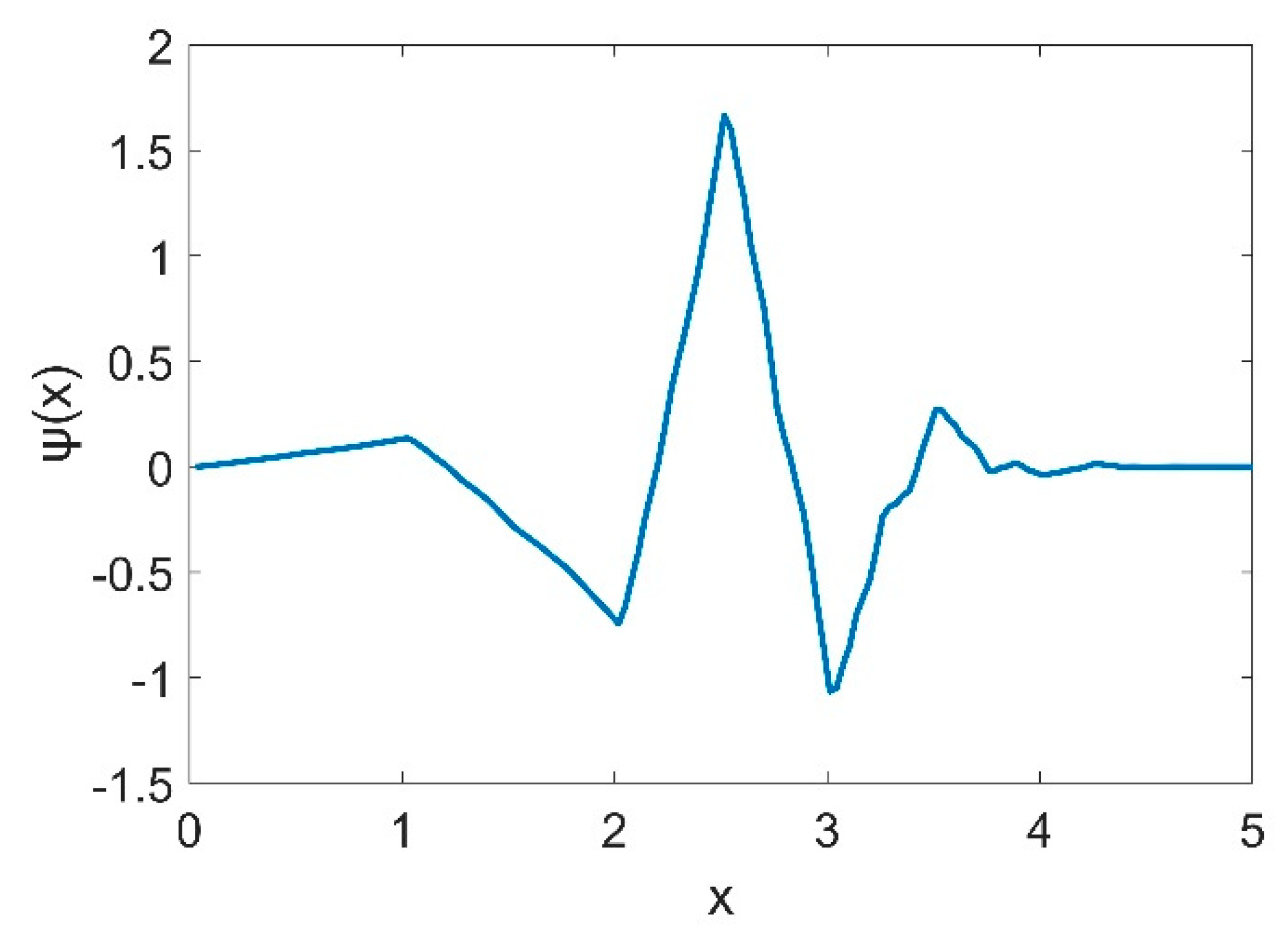
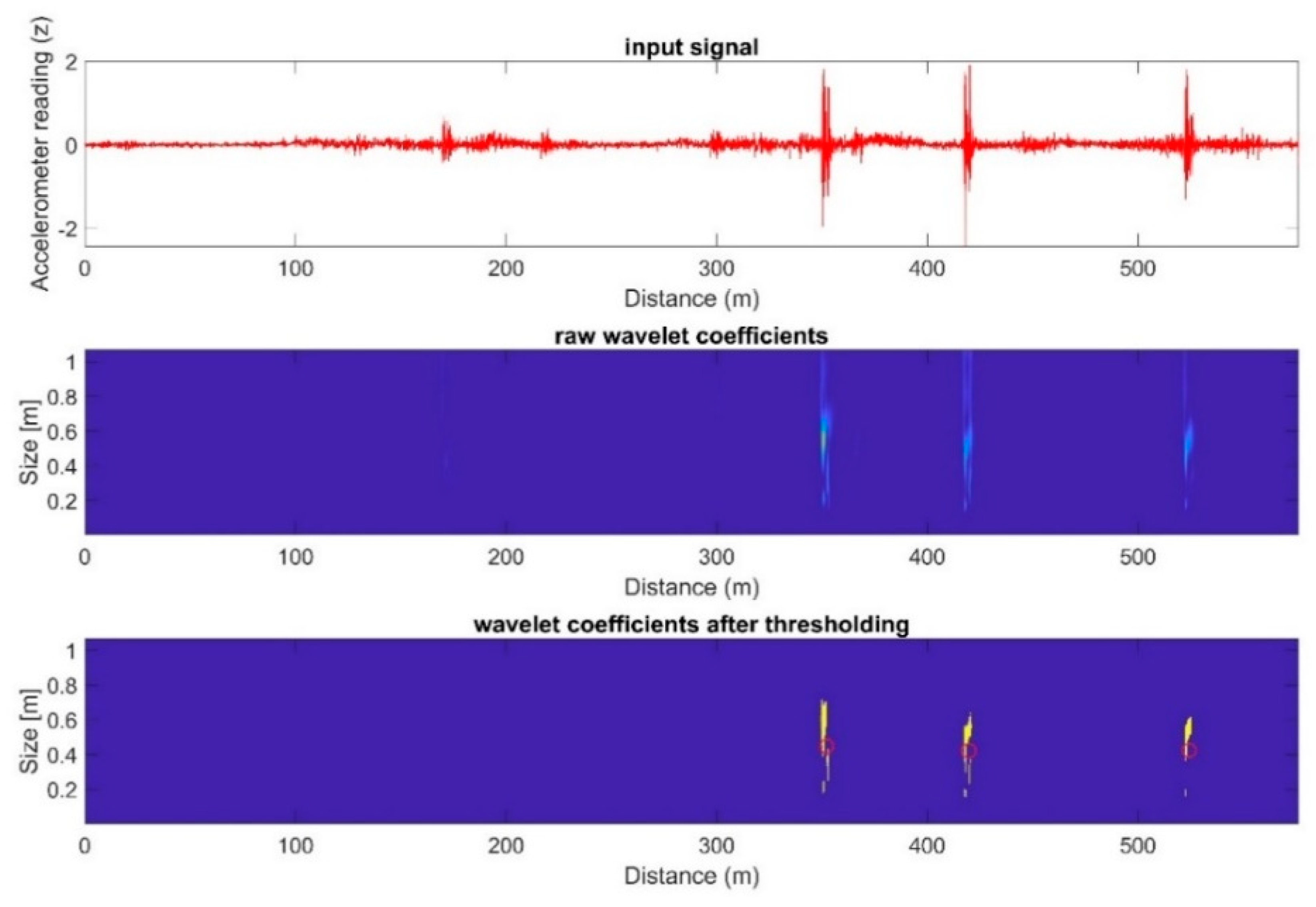
2.2.1. Continuous Wavelet Transform
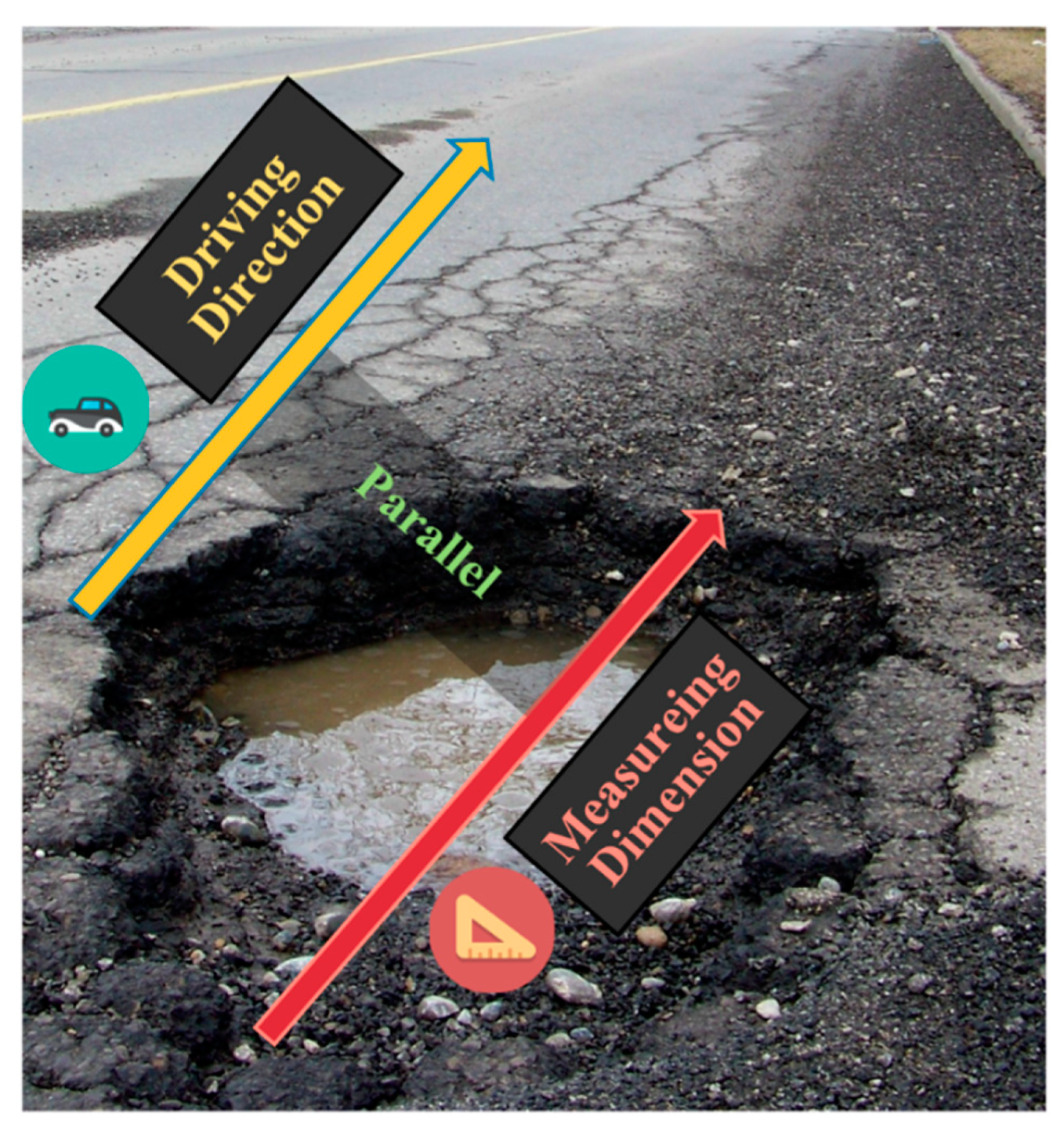
2.2.2. Pothole Size Estimation
- Convert the unitless wavelet scales to physical scales in meters using the algorithm provided by MATLAB Wavelet Toolbox [32].
- Multiply the scale axis by a scaling factor, which relates the converted wavelet scales to the sizes of target. This scaling factor is determined by field experiments at a test site and is kept as a constant unless the data acquisition platform is changed (in this study, we get a value of 0.3 for generic vehicles including sedan and SUV).
- Clean the wavelet coefficient images by thresholding (only keep values that are greater than N times of overall average, and in this case, we use N = 18).
- Apply 2-D Gaussian filter to remove noise and combine detections that correspond to the same pothole. Then the center of each highlighted zone is considered as the center of a detected pothole.
- Get the size estimation for each detected pothole (highlighted zones on the wavelet coefficient image).
2.3. Result Optimiztion by Clustering Crowd Sensed Data
2.3.1. Density-Based Clustering
- Core point—a point which has at least Cmin neighbors—points within the d distance to the tested point are counted as its neighbors.
- Border point—a point which is counted as a neighbor to core points but does not have its own neighbors (the distance is insufficient, less than Cmin).
- Noise point—a point which is neither a core point nor a border point.
- Choose a random sample point from the dataset as a starting point (p).
- Identify the neighbors of p using a customized search distance.
- If p was a core point, it would be marked as visited, a cluster would be formed with the core point and all its connected points. Connected points include p’s neighbors and all reachable points (within a d radius) of its neighbors.
- If p was not a core point, DBSCAN would retrieve an unvisited point from the dataset as a new starting point and repeat the process.
- The process will end when all points are marked as visited or all points are assigned to a cluster.
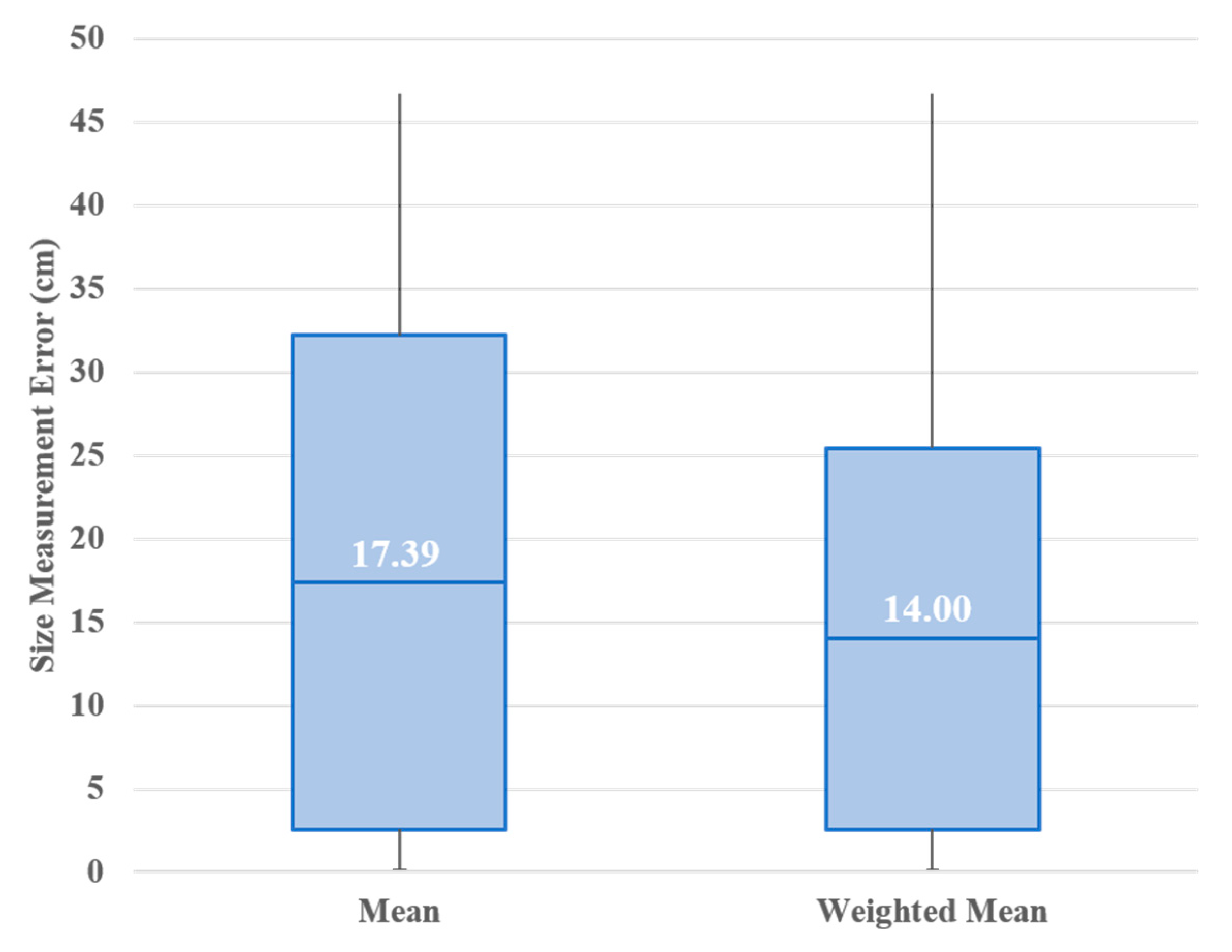
2.3.2. Weighting Schemes
3. Experiments and Results
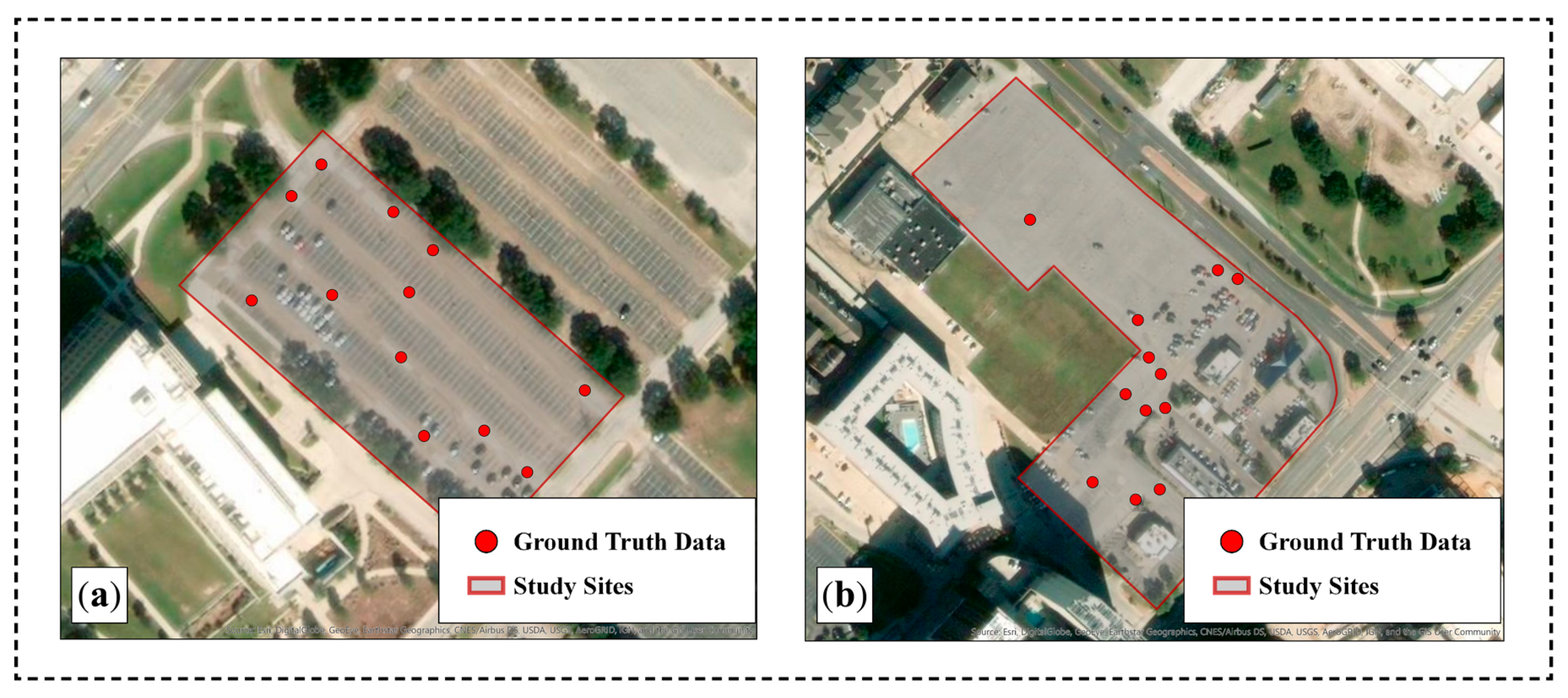
3.1. Experiment Settings
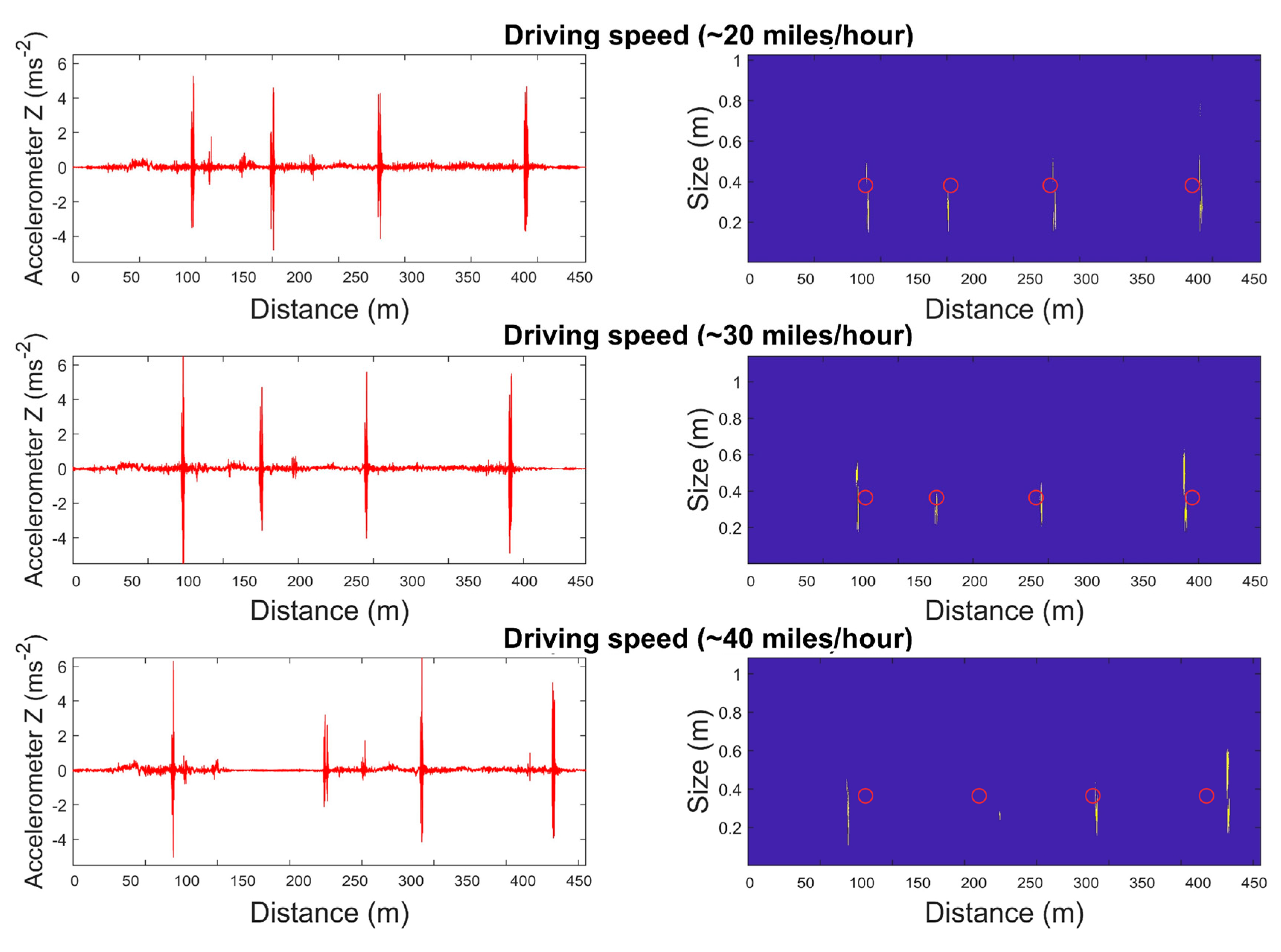
3.2. Wavelet Analysis Results
3.3. Optimized Detection Results by Mining Crowd Sensed Data
3.4. Result Evaluation
- Method 1: Z-axis accelerometer measurements exceeding 0.4g m/s2 are counted as road anomalies.
- Method 2: An improved threshold-based detection method integrated with a simple crowdsensing strategy—anomalies need to be reported by more than three users before finally confirmed. The location for the confirmed anomaly is calculated by averaging all the contributed points.
- Accuracy: Correctly detected anomalies (NCDA)/Total detected anomalies.
- Coverage Rate: Detected ground truth points (NDGT)/Total ground truth points.
- Detection Redundancy: (NCDA - NDGT)/(NCDA)
4. Discussion and Conclusions
- Propose a new anomaly size estimation solution. In this study, we only estimate the driving-dimensional size of road anomalies. In fact, the depth of potholes is also a critical factor for assessing pothole damages. In future work, we will attempt to measure the depth of road anomalies through analyzing the amplitude of mobile sensed abnormal vibration signals.
- Improve the performance of crowdsensing solution. Using spatial clustering methods can efficiently eliminate low-quality contributed data points and optimize detection results. However, the density-based clustering method may mis-cluster two neighboring potholes into the same group, which could influence the detection accuracy. In future work, we will test different spatial clustering methods, compare their performances, and further form a formalized crowdsensing strategy to synthesize crowd sensed data with further improved accuracy.
- Put forward a real-time road anomaly detection system. Drivers can sense road surface using smartphones at real-time. With a certain number of reliable data contributors, we can potentially update road detection results on a daily, or even hourly basis. In future work, we will attempt to recruit vehicles from local governments (e.g., garbage truck, police vehicles) to put forward a real-time road anomaly monitoring system, which could continuously monitor road surface conditions with high accuracy.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bruce, V. Why America Has So Many Potholes. Available online: http://content.time.com/time/magazine/article/0,9171,159579,00.html (accessed on 5 August 2019).
- Bellis, R.; Osborne, B.; Davis, S.L. Repair Priorities 2019; Transportation for America: Washington, DC, USA, 2019. [Google Scholar]
- AAA POTHOLE DAMAGE COSTS U.S. DRIVERS $3 BILLION ANNUALLY. Available online: https://www.oregon.aaa.com/2016/02/pothole-damage-costs-u-s-drivers-3-billion-annually/ (accessed on 5 August 2019).
- The Pothole Facts. Available online: https://www.pothole.info/the-facts/ (accessed on 5 August 2019).
- Sattar, S.; Li, S.; Chapman, M. Road surface monitoring using smartphone sensors: A review. Sensors 2018, 18, 3845. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Goldberg, D.W.; Chu, T.; Ma, A. Enhancing driving safety: Discovering individualized hazardous driving scenes using GIS and mobile sensing. Trans. GIS 2019, 23, 538–557. [Google Scholar] [CrossRef]
- Xu, W.; Chen, R.; Chu, T.; Kuang, L.; Yang, Y.; Li, X.; Liu, J.; Chen, Y. A context detection approach using GPS module and emerging sensors in smartphone platform. In Proceedings of the 2014 Ubiquitous Positioning Indoor Navigation and Location Based Service, Corpus Christ, TX, USA, 20–21 November 2014. [Google Scholar]
- Chen, R.; Chu, T.; Liu, J.; Chen, Y.; Chen, L.; Xu, W.; Li, X.; Hyyppa, J.; Tang, J. Development of a contextual thinking engine in mobile devices. In Proceedings of the 2014 IEEE Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christ, TX, USA, 20–21 November 2014; pp. 90–96. [Google Scholar]
- Guo, B.; Chen, C.; Zhang, D.; Yu, Z.; Chin, A. Mobile crowd sensing and computing: When participatory sensing meets participatory social media. IEEE Commun. Mag. 2016, 54, 131–137. [Google Scholar] [CrossRef]
- Guo, B.; Yu, Z.; Zhou, X.; Zhang, D. From participatory sensing to Mobile Crowd Sensing. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communication Workshops, PERCOM WORKSHOPS 2014, Budapest, Hungary, 24–28 March 2014. [Google Scholar]
- Panichpapiboon, S.; Leakkaw, P. Traffic Density Estimation: A Mobile Sensing Approach. IEEE Commun. Mag. 2017, 55, 126–131. [Google Scholar] [CrossRef]
- Guo, B.; Chen, C.; Yu, Z.; Zhang, D.; Zhou, X. Building human-machine intelligence in mobile crowd sensing. IT Prof. 2015, 17, 46–52. [Google Scholar] [CrossRef]
- Zappatore, M.; Longo, A.; Bochicchio, M.A. Using mobile crowd sensing for noise monitoring in smart cities. In Proceedings of the 2016 International Multidisciplinary Conference on Computer and Energy Science, Split, Croatia, 13–15 July 2016. [Google Scholar]
- Astarita, V.; Caruso, M.V.; Danieli, G.; Festa, D.C.; Giofrè, V.P.; Iuele, T.; Vaiana, R. A Mobile Application for Road Surface Quality Control: UNIquALroad. Procedia-Soc. Behav. Sci. 2012, 54, 1135–1144. [Google Scholar] [CrossRef]
- Li, X.; Goldberg, D.W. Toward a mobile crowdsensing system for road surface assessment. Comput. Environ. Urban Syst. 2018, 69, 51–62. [Google Scholar] [CrossRef]
- Li, X.; Chen, R.; Chu, T. A crowdsourcing solution for road surface roughness detection using smartphones. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS 2014, Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using Android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems and Workshops, DCOSS’11, Barcelona, Spain, 27–29 June 2011. [Google Scholar]
- Rishiwal, V.; Khan, H. Automatic pothole and speed breaker detection using android system. In Proceedings of the 2016 39th International Convention on Information and Communication Technology, Electronics and Microelectronics, MIPRO 2016—Proceedings, Opatija, Croatia, 30 May–3 June 2016. [Google Scholar]
- Zang, K.; Shen, J.; Huang, H.; Wan, M.; Shi, J. Assessing and mapping of road surface roughness based on GPS and accelerometer sensors on bicycle-mounted smartphones. Sensors 2018, 18, 914. [Google Scholar] [CrossRef] [PubMed]
- Kalim, F.; Jeong, J.; Ilyas, M.U. CRATER: A Crowd Sensing Application to Estimate Road Conditions. IEEE Access 2016, 4, 8317–8326. [Google Scholar] [CrossRef]
- Celaya-Padilla, J.M.; Galván-Tejada, C.E.; López-Monteagudo, F.E.; Alonso-González, O.; Moreno-Báez, A.; Martínez-Torteya, A.; Galván-Tejada, J.I.; Arceo-Olague, J.G.; Luna-García, H.; Gamboa-Rosales, H. Speed bump detection using accelerometric features: A genetic algorithm approach. Sensors 2018, 18, 443. [Google Scholar] [CrossRef] [PubMed]
- Silva, N.; Shah, V.; Soares, J.; Rodrigues, H. Road anomalies detection system evaluation. Sensors 2018, 18, 1984. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.; Fwa, T.F.; Zhe, Z. Wavelet Analysis and Interpretation of Road Roughness. J. Transp. Eng. 2005, 131, 120–130. [Google Scholar] [CrossRef]
- Bello-Salau, H.; Aibinu, A.M.; Onumanyi, A.J.; Onwuka, E.N.; Dukiya, J.J.; Ohize, H. New road anomaly detection and characterization algorithm for autonomous vehicles. Appl. Comput. Inform. 2018. [Google Scholar] [CrossRef]
- Silveira Rodrigues, R.; Pasin, M.; Kozakevicius, A.; Monego, V. Pothole Detection in Asphalt: An Automated Approach to Threshold Computation Based on the Haar Wavelet Transform. In Proceedings of the 2019 IEEE 43rd Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019; pp. 306–315. [Google Scholar]
- Sabir, N.; Memon, A.A.; Shaikh, F.K. Threshold Based Efficient Road Monitoring System Using Crowdsourcing Approach. Wirel. Pers. Commun. 2019, 106, 2407–2425. [Google Scholar] [CrossRef]
- Motion Sensors. Available online: https://developer.android.com/guide/topics/sensors/sensors_motion (accessed on 5 August 2019).
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, Washington, DC, USA, 5–7 October 2011. [Google Scholar]
- Sayers, M.W.; Gillespie, T.D.; Queiroz, C.A.V. The International Road Roughness Experiment—Establishing Correlation and a Calibration Standard for Measurements; The World Bank: Washington, DC, USA, 1986; ISBN 0821305891. [Google Scholar]
- Hayhoe, G. Spectral Characteristics of Longitudinal Highway Profiles as Related to Ride Quality. In Vehicle, Tire, Pavement Interface; ASTM International: West Conshohocken, PA, USA, 2009; pp. 32–53. [Google Scholar]
- Daubechies, I. Ten Lectures on Wavelets; Siam: Philadelphia, PA, USA, 1992. [Google Scholar]
- Misiti, M.; Misiti, Y.; Oppenheim, G.; Poggi, J.-M. MathWorks Wavelet Toolbox User’s Guide; MathWorks Inc.: Natick, MA, USA, 2015. [Google Scholar]
- Esri How Density-Based Clustering Works. Available online: https://pro.arcgis.com/en/pro-app/tool-reference/spatial-statistics/how-density-based-clustering-works.htm (accessed on 31 July 2019).
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996. [Google Scholar]
- Campello, R.J.G.B.; Moulavi, D.; Sander, J. Density-based clustering based on hierarchical density estimates. In Proceedings of the 17th Pacific-Asia Conference on Knowledge Discovery and Data Mining, Gold Coast, Australia, 14–17 April 2013. [Google Scholar]
- How HDBSCAN Works. Available online: https://hdbscan.readthedocs.io/en/latest/how_hdbscan_works.html (accessed on 5 August 2019).
- Lee, J.; Wong, D.W.S. Point Descriptors. In Statistical Analysis with ArcView GIS; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2001; pp. 33–58. ISBN 0471348740. [Google Scholar]
- Massaro, E.; Ahn, C.; Ratti, C.; Santi, P.; Stahlmann, R.; Lamprecht, A.; Roehder, M.; Huber, M. The Car as an Ambient Sensing Platform. Proc. IEEE 2017, 105, 3–7. [Google Scholar] [CrossRef]
- Fugiglando, U.; Massaro, E.; Santi, P.; Milardo, S.; Abida, K.; Stahlmann, R.; Netter, F.; Ratti, C. Driving Behavior Analysis through CAN Bus Data in an Uncontrolled Environment. IEEE Trans. Intell. Transp. Syst. 2019, 20, 737–748. [Google Scholar] [CrossRef]
- Schwarz, B. Lidar: Mapping the world in 3D. Nat. Photonics 2010, 4, 429. [Google Scholar] [CrossRef]
- Wang, H.; Wang, B.; Liu, B.; Meng, X.; Yang, G. Pedestrian recognition and tracking using 3D LiDAR for autonomous vehicle. Rob. Auton. Syst. 2017, 88, 71–78. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment Settings | Lot 1 | Lot2 |
|---|---|---|
| Data acquisition time | 02/24/2019 2:10 pm | 06/01/2019 11:10 am |
| Road anomalies | 12 potholes | 8 potholes and 4 bumps |
| Vehicles models | 2009 Toyota Corolla and 2009 Toyota RVA4 | 2009 Toyota Corolla and 2009 Toyota RVA4 |
| Phone models and apps | Moto X Pure: PotholeAnalyzor | Moto X Pure: PotholeAnalyzor |
| iPhone 8: CrowdSense | iPhone 8: CrowdSense | |
| Sensors sampling rates | Accelerometer: 100Hz | Accelerometer: 100Hz |
| GPS: 1Hz | GPS: 1Hz | |
| Driving tests | 2 drivers. | 2 drivers. |
| Driver 1: test 3 times using Moto X Pure. | Driver 1: test 3 times using Moto X Pure. | |
| Driver 2: test 2 times using iPhone 8. | Driver 2: test 2 times using iPhone 8. | |
| Ground Truth Acquisition | Manually collected with GARMIN GPSMAP 78 and ruler. | Manually collected with GARMIN GPSMAP 78 and ruler. |
| Criteria | Evaluation Indices | Method 1 | Method 2 | Our Method |
|---|---|---|---|---|
| Detection Efficiency | Accuracy | 43.90% | 64.71% | 94.44% |
| Coverage Rate | 66.67% | 70.83% | 70.83% | |
| Detection Redundancy | 11.11% | 22.22% | 00.00% | |
| Positioning Accuracy (meter) | Min | 0.60 | 0.73 | 0.58 |
| Mean | 3.47 | 4.07 | 3.29 | |
| Max | 9.88 | 7.27 | 6.21 | |
| STEDV | 2.58 | 2.41 | 1.56 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Huo, D.; Goldberg, D.W.; Chu, T.; Yin, Z.; Hammond, T. Embracing Crowdsensing: An Enhanced Mobile Sensing Solution for Road Anomaly Detection. ISPRS Int. J. Geo-Inf. 2019, 8, 412. https://doi.org/10.3390/ijgi8090412
Li X, Huo D, Goldberg DW, Chu T, Yin Z, Hammond T. Embracing Crowdsensing: An Enhanced Mobile Sensing Solution for Road Anomaly Detection. ISPRS International Journal of Geo-Information. 2019; 8(9):412. https://doi.org/10.3390/ijgi8090412
Chicago/Turabian StyleLi, Xiao, Da Huo, Daniel W. Goldberg, Tianxing Chu, Zhengcong Yin, and Tracy Hammond. 2019. "Embracing Crowdsensing: An Enhanced Mobile Sensing Solution for Road Anomaly Detection" ISPRS International Journal of Geo-Information 8, no. 9: 412. https://doi.org/10.3390/ijgi8090412
APA StyleLi, X., Huo, D., Goldberg, D. W., Chu, T., Yin, Z., & Hammond, T. (2019). Embracing Crowdsensing: An Enhanced Mobile Sensing Solution for Road Anomaly Detection. ISPRS International Journal of Geo-Information, 8(9), 412. https://doi.org/10.3390/ijgi8090412