Estimation of Indoor Location Through Magnetic Field Data: An Approach Based On Convolutional Neural Networks

 ,
,  , ,
, , 
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Magnetic Field Sensors
2.2. Data Pre-Processing
2.2.1. Magnitude of Magnetic Field Data
2.2.2. Normalization
2.2.3. Energy Grouping
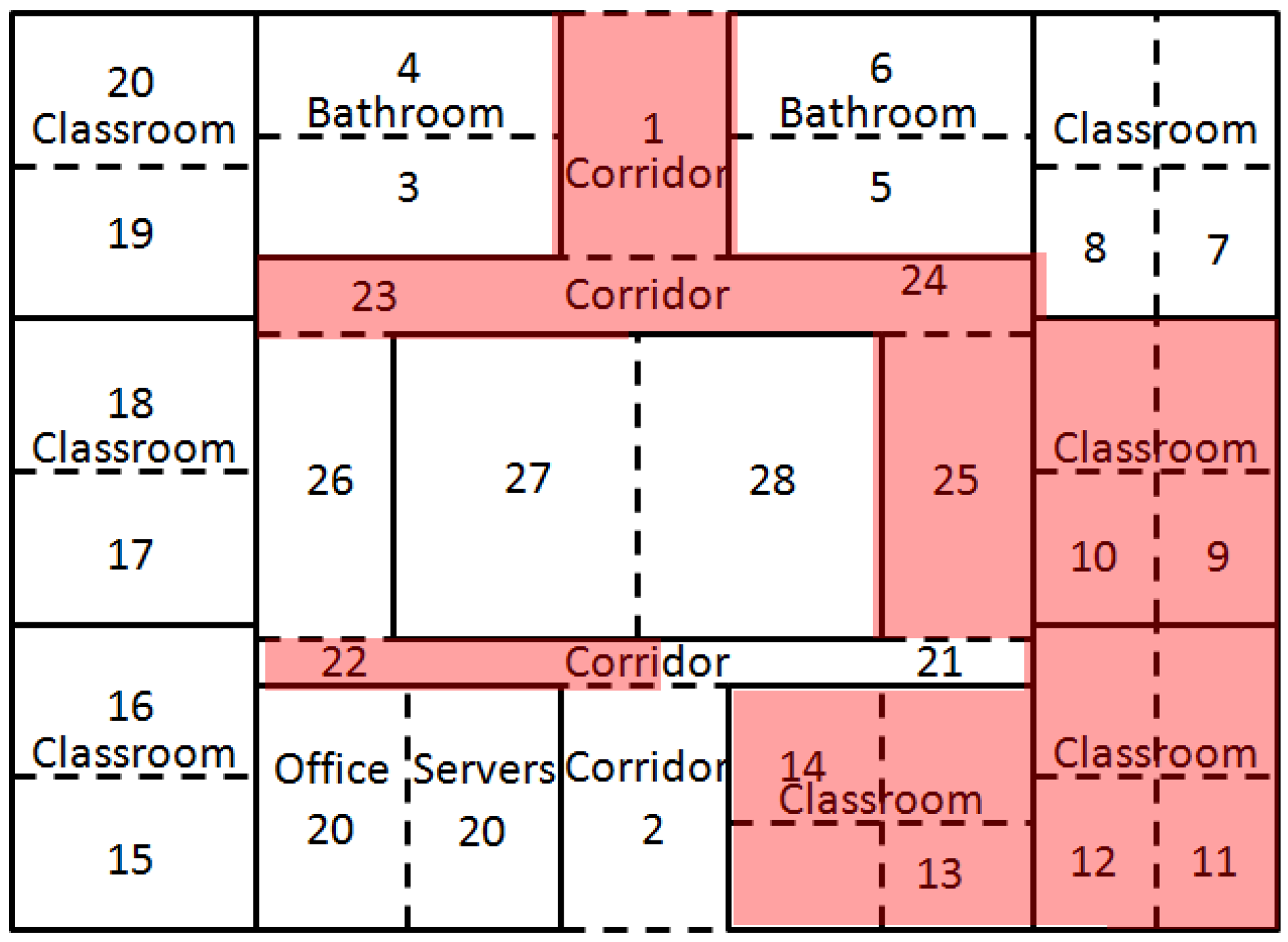
2.3. Data set Description
2.4. Convolutional Neural Network
Model Training
2.5. Model Validation
3. Experiments and Results
- In general, the boxes that represent the energy measurements do not show symmetry, since is not in the center.
- The boxes show similar interquartile difference, which adds complexity to the development, as mentioned in Section 2.3, by having some similar measurements between rooms.
- The average measurements for the regions are not similar between rooms.
- There are no outliers, which demonstrates consistency and reliability in measurements.
4. Discussion and Conclusions
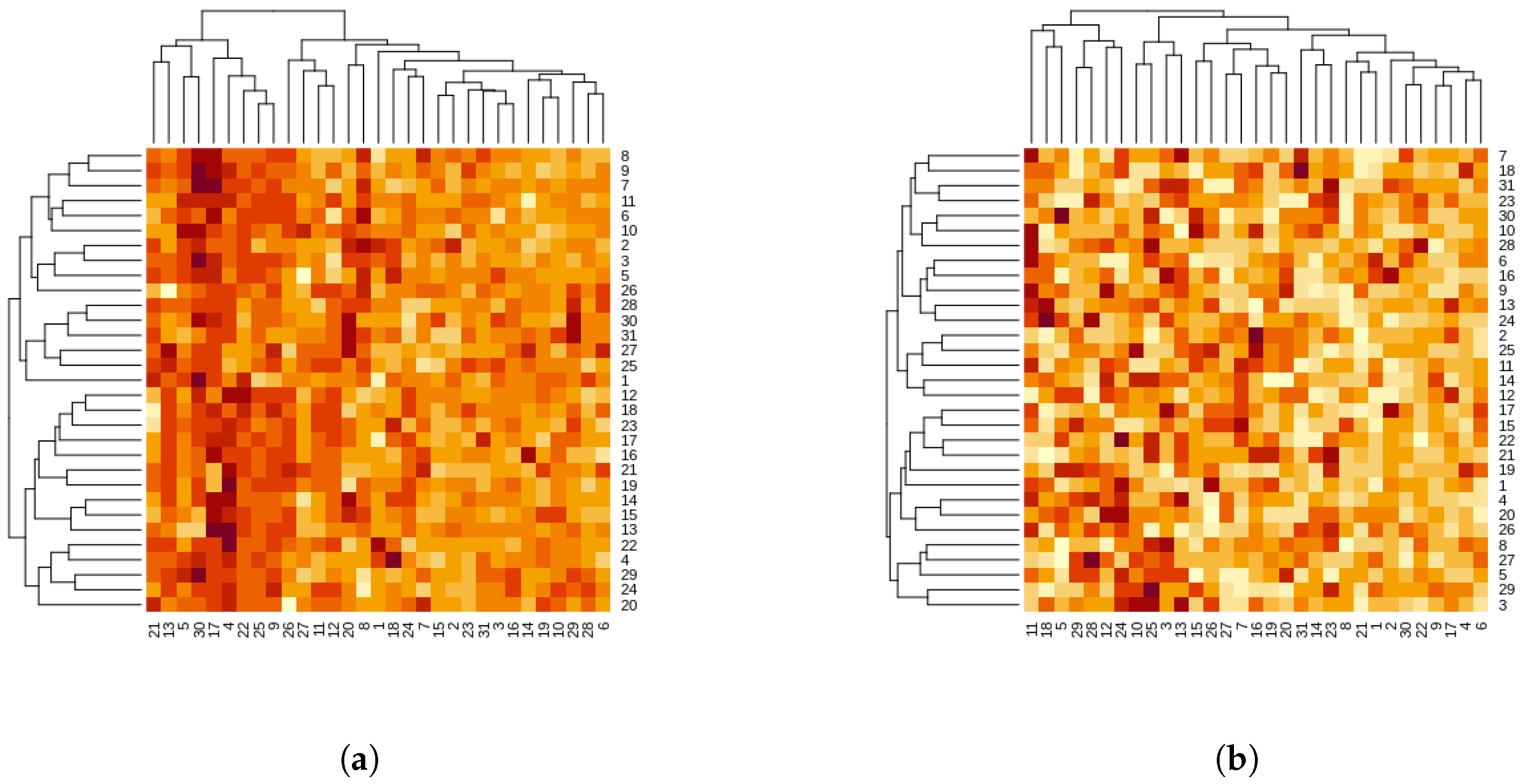
- Magnetic field fingerprints can be viewed as bi-dimensional data: Even when magnetic field data is viewed as a unique data point, a collection of points of a room can be treated as a bi-dimensional data heatmap that allows us to develop an ILS with bi-dimensional techniques. In this proposal, these bi-dimensional representations are viewed as a spectral evolution after applying an FFT, as presented in the results section, which means that spectral information and their properties are present due to the above, it means that a partial fingerprint has enough information that can identify the room.
- CNN can be used to work with magnetic data: Currently, CNN has been widely used for the development of classification models in the field of image processing. However, the application presented in this work, with the magnetic field data seen as a bi-dimensional heatmap, has been shown to have the potential to be used as input for the training of a CNN in order to develop an ILS. According to the results obtained, the classification of indoor locations based on the modeling of magnetic field data allows us to obtain statistically significant accuracy. However, CNN could be improved in several ways, for instance, changing the loss function could lead to upgrading the performance of the CNN for this specific scenario, additionally a deeper NN can increase the AUC for complex buildings. Nevertheless, these last modifications needs a special study to be sure of the avoidance of the over fitting problem.
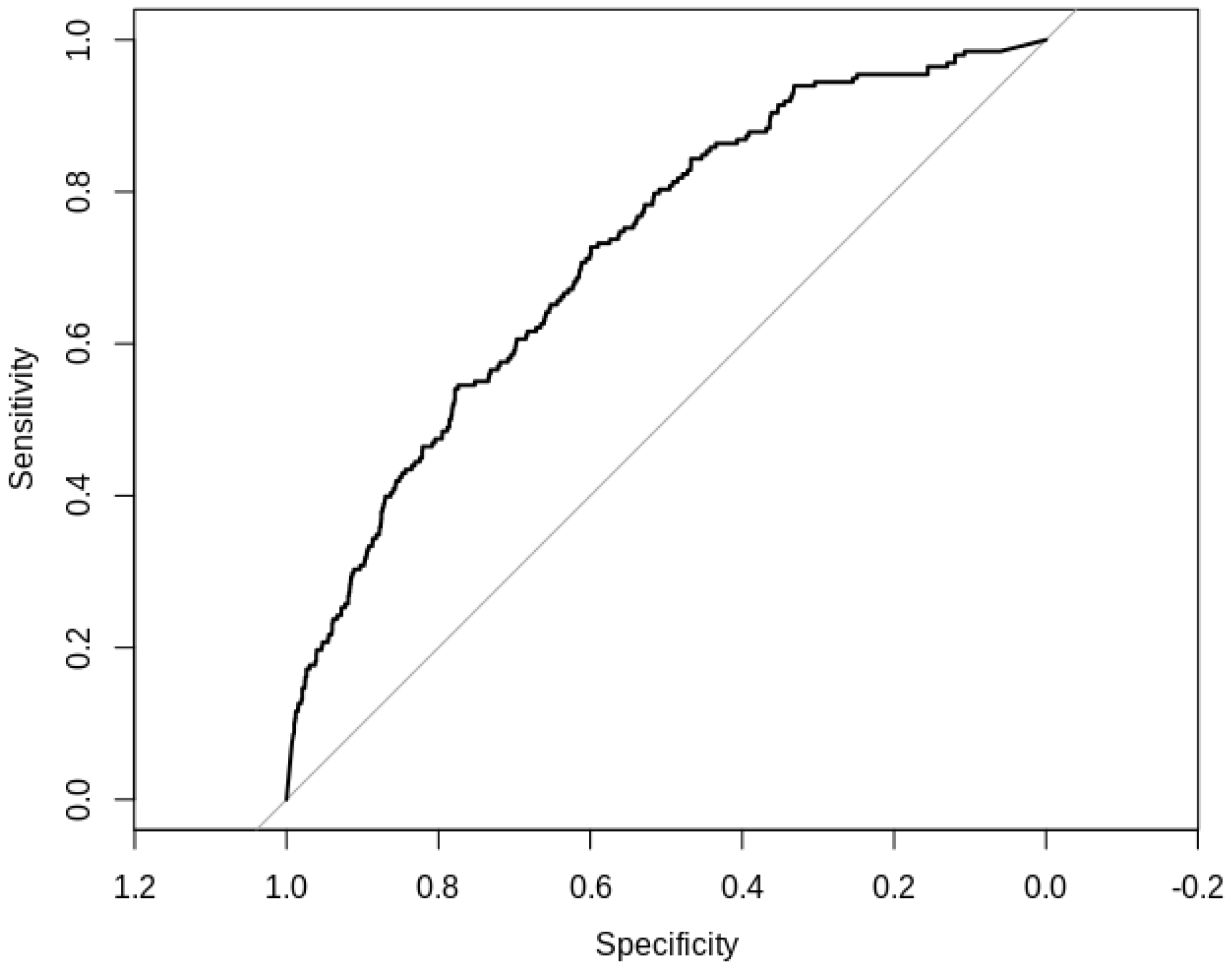
- Magnetic field data present enough information to develop an ILS: Several approaches include magnetic field as a second data source to complement another type of signal. However viewed as a bi-dimensional data source, magnetic field has enough information to develop an ILS, achieving almost 75% of AUC. Nevertheless, the reduction of AUC in the blind set could reflect a overfitting problem that must be studied.
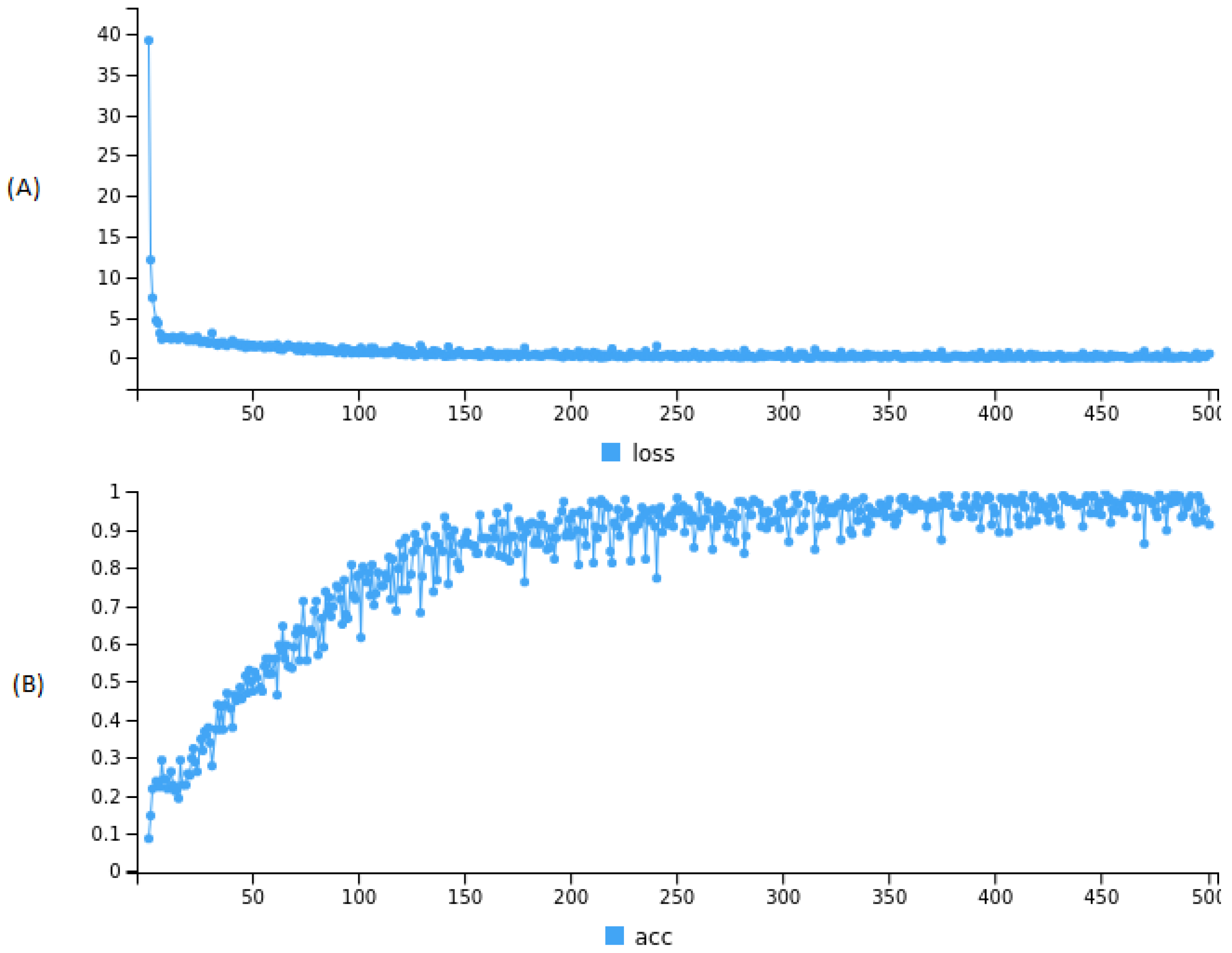
- Deeper Networks and longer training improve the fitness of the CNN: Accuracy of the CNN increase along the 500 epochs proposed in this work, meaning a better ILS complemented with the reduction of the loss metric.
5. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Grönroos, S.; Peltonen, L.M.; Soloviev, V.; Lilius, J.; Salanterä, S. Indoor positioning system for movement path analysis in healthcare institutions. Finn. J. eHealth eWelf. 2017, 9, 112–120. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Cheng, D.; Pei, T.; Shu, H.; Ge, X.; Ma, T.; Du, Y.; Ou, Y.; Wang, M.; Xu, L. Inferring gender and age of customers in shopping malls via indoor positioning data. In Environment and Planning B: Urban Analytics and City Science; Sage Publications: London, UK, 2019; p. 2399808319841910. [Google Scholar]
- Ionescu, L.; Belu, N.; Rachieru, N.; Mazăre, A.; Anghel, D. Monitoring of manufacturing processes in the automotive industry using indoor location system. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2016; Volume 145, p. 022020. [Google Scholar]
- Galván-Tejada, C.E.; García-Vázquez, J.P.; Brena, R.F. Natural or generated signals for indoor location systems? An evaluation in terms of sensitivity and specificity. In Proceedings of the IEEE 2014 International Conference on Electronics, Communications and Computers (CONIELECOMP), Cholula, Mexico, 26–28 February 2014; pp. 166–171. [Google Scholar]
- Afuosi, M.B.; Zoghi, M.R. Indoor Positioning Based on Improved Weighted KNN for Energy Management in Smart Buildings. Energy Build. 2020, 212, 109754. [Google Scholar] [CrossRef]
- Cui, W.; Liu, Q.; Zhang, L.; Wang, H.; Lu, X.; Li, J. A robust mobile robot indoor positioning system based on Wi-Fi. Int. J. Adv. Robot. Syst. 2020, 17, 1729881419896660. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID indoor positioning algorithm based on Bayesian probability and K-nearest neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth indoor positioning based on RSSI and Kalman filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the 1st IEEE International Conference on Pervasive Computing and Communications, (PerCom 2003), Fort Worth, TX, USA, 23–16 March 2003; pp. 407–415. [Google Scholar]
- King, T.; Lemelson, H.; Farber, A.; Effelsberg, W. Bluepos: Positioning with bluetooth. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 55–60. [Google Scholar]
- Tilch, S.; Mautz, R. CLIPS—A camera and laser-based indoor positioning system. J. Locat. Based Servi. 2013, 7, 3–22. [Google Scholar] [CrossRef]
- IndoorAtlas, L. Ambient Magnetic Field-Based Indoor Location Technology: Bringing the Compass to the Next Level; IndoorAtlas Ltd.: Mountain View, CA, USA, 2012. [Google Scholar]
- Priyantha, N.B. The cricket indoor location system. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Majeed, K.; Hranilovic, S. Performance Bounds on Passive Indoor Positioning using Visible Light. J. Lightw. Technol. 2020, 38, 2190–2200. [Google Scholar] [CrossRef]
- Guan, W.; Chen, S.; Wen, S.; Hou, W.; Tan, Z.; Cen, R. Indoor Localization System of ROS mobile robot based on Visible Light Communication. arXiv 2020, arXiv:eess.SP/2001.01888. [Google Scholar]
- Chang, C.H.; Lin, C.Y.; Wang, R.G.; Chou, C.C. Applying Deep Learning and Building Information Modeling to Indoor Positioning Based on Sound. In Computing in Civil Engineering 2019: Visualization, Information Modeling, and Simulation; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 193–199. [Google Scholar]
- Tung, Y.C.; Shin, K.G. Echotag: Accurate infrastructure-free indoor location tagging with smartphones. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 525–536. [Google Scholar]
- Galván-Tejada, C.E.; García-Vázquez, J.P.; Brena, R.F. Magnetic field feature extraction and selection for indoor location estimation. Sensors 2014, 14, 11001–11015. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the IEEE 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Shao, W.; Zhao, F.; Wang, C.; Luo, H.; Muhammad Zahid, T.; Wang, Q.; Li, D. Location fingerprint extraction for magnetic field magnitude based indoor positioning. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]
- Shen, G.J.; Zhao, C.; Zhao, F. Indoor Location-Finding Using Magnetic Field Anomalies. U.S. Patent 9,326,103, 26 April 2016. [Google Scholar]
- Ashraf, I.; Hur, S.; Park, S.; Park, Y. DeepLocate: Smartphone Based Indoor Localization with a Deep Neural Network Ensemble Classifier. Sensors 2020, 20, 133. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farfade, S.S.; Saberian, M.J.; Li, L.J. Multi-view face detection using deep convolutional neural networks. In Proceedings of the 5th ACM on International Conference on Multimedia Retrieval, Shanghai, China, 23–16 June 2015; pp. 643–650. [Google Scholar]
- Chen, J.; Ou, Q.; Chi, Z.; Fu, H. Smile detection in the wild with deep convolutional neural networks. Mach. Vis. Appl. 2017, 28, 173–183. [Google Scholar] [CrossRef]
- Khan, K.; Attique, M.; Khan, R.U.; Syed, I.; Chung, T.S. A Multi-Task Framework for Facial Attributes Classification through End-to-End Face Parsing and Deep Convolutional Neural Networks. Sensors 2020, 20, 328. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-homayani, F.; Mahoor, M. Improved indoor geomagnetic field fingerprinting for smartwatch localization using deep learning. In Proceedings of the 2018 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Ashraf, I.; Hur, S.; Park, Y. Application of Deep Convolutional Neural Networks and Smartphone Sensors for Indoor Localization. Appl. Sci. 2019, 9, 2337. [Google Scholar] [CrossRef] [Green Version]
- Bergland, G. A guided tour of the fast Fourier transform. IEEE Spectr. 1969, 6, 41–52. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019. [Google Scholar]
- Ganapathi, I.I.; Prakash, S.; Dave, I.R.; Bakshi, S. Unconstrained ear detection using ensemble-based convolutional neural network model. In Concurrency and Computation: Practice and Experience; Wiley: Hoboken, NJ, USA, 2020; p. e5197. [Google Scholar]
- Pratt, S.; Ochoa, A.; Yadav, M.; Sheta, A.; Eldefrawy, M. Handwritten Digits Recognition Using Convolution Neural Networks. J. Comput. Sci. Coll. 2019, 34, 40. [Google Scholar]
- Hai, J.; Qiao, K.; Chen, J.; Tan, H.; Xu, J.; Zeng, L.; Shi, D.; Yan, B. Fully convolutional densenet with multiscale context for automated breast tumor segmentation. J. Healthc. Eng. 2019, 2019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmidt-Hieber, J. Nonparametric regression using deep neural networks with ReLU activation function. arXiv 2017, arXiv:1708.06633. [Google Scholar]
- Kouretas, I.; Paliouras, V. Simplified Hardware Implementation of the Softmax Activation Function. In Proceedings of the IEEE 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019; pp. 1–4. [Google Scholar]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor localization using pervasive magnetic field and opportunistic WiFi sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Keras. 2015. Available online: https://keras.io (accessed on 10 October 2019).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Room Number | Room Type | Number of Raw Fingerprints |
|---|---|---|
| 1 | Center wide corridor | 40 |
| 9 | Partial classroom | 37 |
| 10 | Partial classroom | 36 |
| 11 | Partial classroom | 42 |
| 12 | Partial classroom | 37 |
| 13 | Partial classroom | 39 |
| 14 | Partial classroom | 42 |
| 22 | Lower narrow corridor | 42 |
| 23 | Upper narrow corridor | 36 |
| 24 | Upper narrow corridor | 37 |
| 25 | Right wide corridor | 38 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galván-Tejada, C.E.; Zanella-Calzada, L.A.; García-Domínguez, A.; Magallanes-Quintanar, R.; Luna-García, H.; Celaya-Padilla, J.M.; Galván-Tejada, J.I.; Vélez-Rodríguez, A.; Gamboa-Rosales, H. Estimation of Indoor Location Through Magnetic Field Data: An Approach Based On Convolutional Neural Networks. ISPRS Int. J. Geo-Inf. 2020, 9, 226. https://doi.org/10.3390/ijgi9040226
Galván-Tejada CE, Zanella-Calzada LA, García-Domínguez A, Magallanes-Quintanar R, Luna-García H, Celaya-Padilla JM, Galván-Tejada JI, Vélez-Rodríguez A, Gamboa-Rosales H. Estimation of Indoor Location Through Magnetic Field Data: An Approach Based On Convolutional Neural Networks. ISPRS International Journal of Geo-Information. 2020; 9(4):226. https://doi.org/10.3390/ijgi9040226
Chicago/Turabian StyleGalván-Tejada, Carlos E., Laura A. Zanella-Calzada, Antonio García-Domínguez, Rafael Magallanes-Quintanar, Huizilopoztli Luna-García, Jose M. Celaya-Padilla, Jorge I. Galván-Tejada, Alberto Vélez-Rodríguez, and Hamurabi Gamboa-Rosales. 2020. "Estimation of Indoor Location Through Magnetic Field Data: An Approach Based On Convolutional Neural Networks" ISPRS International Journal of Geo-Information 9, no. 4: 226. https://doi.org/10.3390/ijgi9040226
APA StyleGalván-Tejada, C. E., Zanella-Calzada, L. A., García-Domínguez, A., Magallanes-Quintanar, R., Luna-García, H., Celaya-Padilla, J. M., Galván-Tejada, J. I., Vélez-Rodríguez, A., & Gamboa-Rosales, H. (2020). Estimation of Indoor Location Through Magnetic Field Data: An Approach Based On Convolutional Neural Networks. ISPRS International Journal of Geo-Information, 9(4), 226. https://doi.org/10.3390/ijgi9040226