
Modular Multifunctional Composite Structure for CubeSat Applications: Embedded Battery Prototype Modal Analysis



Abstract
:1. Introduction
“The basic design of the satellite is comprised of a cube structure with a stack of circuit boards inside. Each face of the satellite will be covered with solar cells. The center of the satellite will have two rechargeable batteries. The batteries split the functions of the satellite into two parts. One half of the satellite contains the satellite computer, communications electronics, and attitude control system. The other half is available for a payload.”
2. Modular Multifunctional Approach Advantages
2.1. The Volumetric Efficiency
- The payload, whose subscript is “payl”;
- The spacecraft bus subsystems, whose subscripts are 1, 2, …, s.
2.2. The Amplitude of the Payload Design Space
- 1.
- If there is just one possible payload configuration, the amplitude of the relative design space is zero:According to the chosen payload design philosophy, this condition is undesired, because there is no choice in the payload design and only one kind of space mission can be realized;
- 2.
- f is a strictly increasing monotonic function of the number of configurations P. More precisely, f is assumed to be piecewise linear. This is due to the fact that configurations produced in different portions of the CubeSat volume produce different magnitudes of increments in design space amplitude. For example, an increment in the configurations produced in the internal volume of the CubeSat produces a certain increment of the design space amplitude. If the same increment in configurations is introduced in the tuna can volume [2] (p. 11), the relative increment in the design space amplitude must be inferior to the increment in the CubeSat internal volume, due to the fact that the area of the tuna can cross section is inferior to the area of the CubeSat internal cross-section. Moreover, the tuna can have a circular cross-section, while the CubeSat internal cross-section is square.
- 1.
- Different locations for the bus systems are considered. In the traditional solution, they are placed only in the internal volume of the satellite (except for small components like solar cells), while with a full smart tiles approach, they only occupy the external faces of the cube. Intermediate solutions are also considered, i.e., with part of the bus occupying the internal volume (for bulky components like reaction wheels) and part on the external faces (for thinner components like solar cells);
- 2.
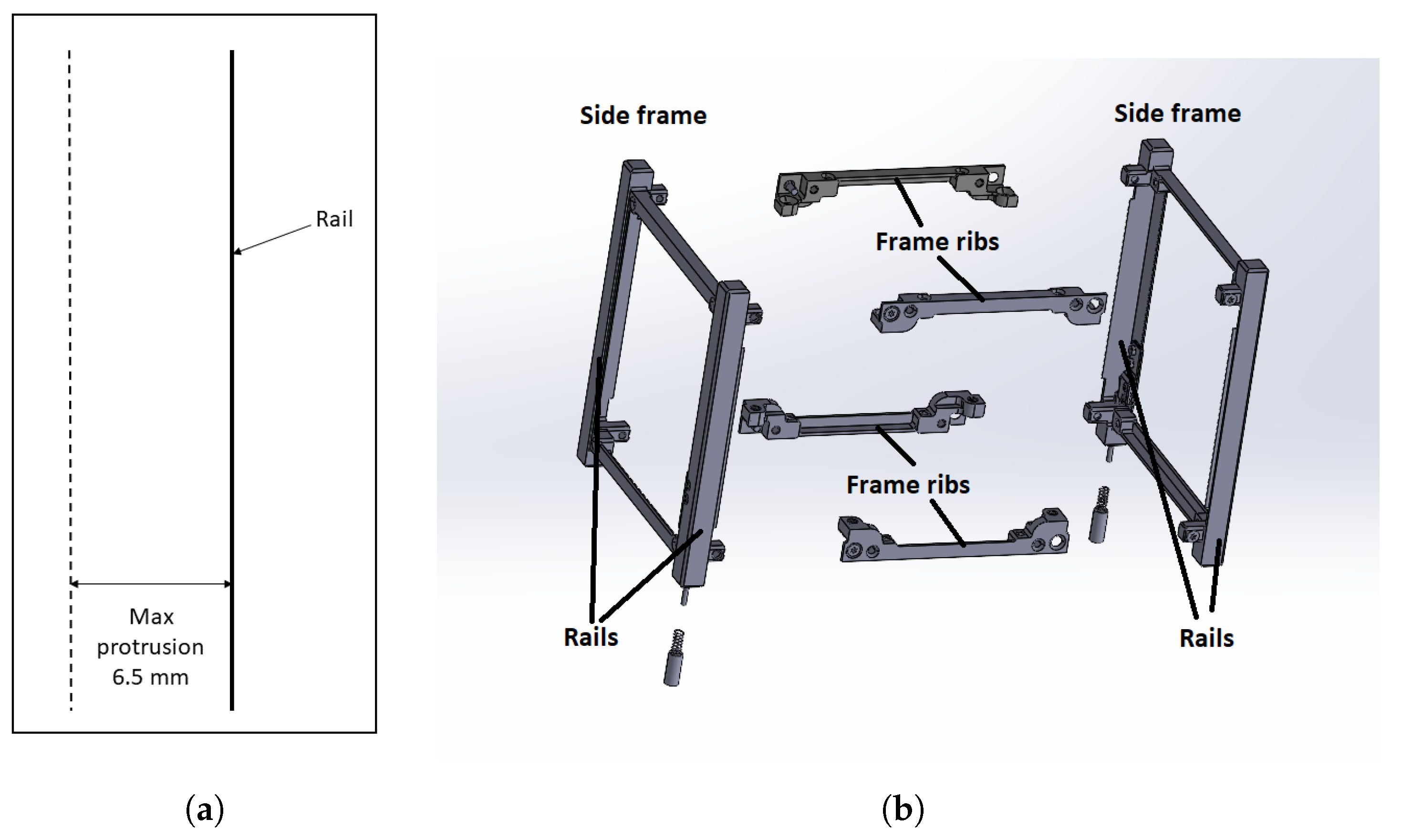
- The payload is hosted in the internal volume of the CubeSat only. This happens if the payload thickness is greater than 6.5 mm and cannot fit on the external faces (CubeSat mechanical requirement 3.2.3, [2] (p. 9)). Usually, the external faces are dedicated to the solar cells and to the electrical power system (EPS) and the payload is commonly located in the inside of the spacecraft. Possible reasons leading to choose an internal payload may be the payload delicacy or the protection from a thermal or radiation environment;
- 3.
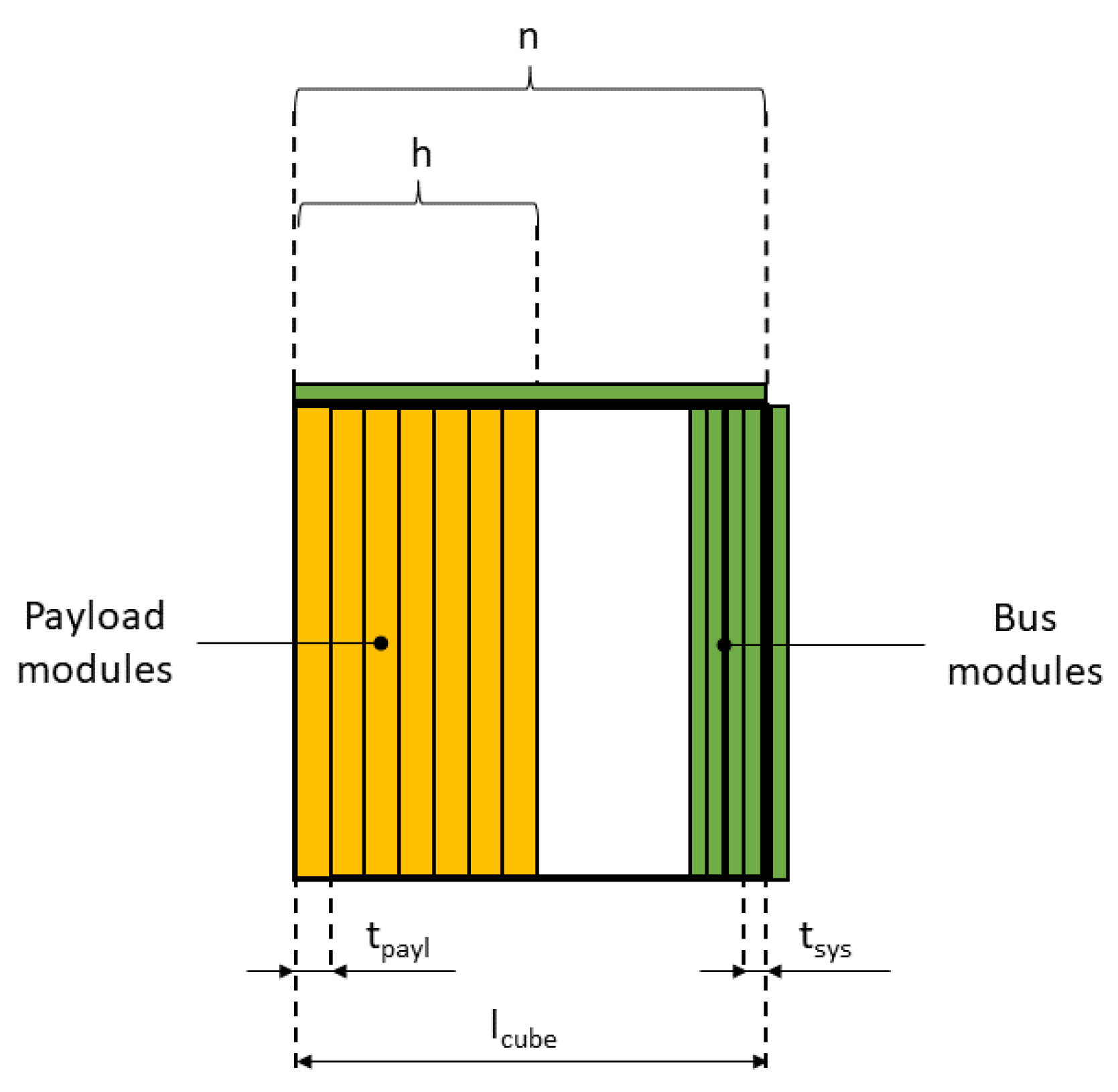
- The payload is composed of a set of modules with an equal, prismatic shape. The modules section is coincident with the cross-section of the internal volume of the CubeSat (in Figure 4, the payload modules are represented with the yellow boxes). This configuration is common for CubeSats payloads ([18] (p. 11), [19] (p. 4), [20] (p. 3)) and could represent a set of printed circuit boards (PCBs);
- 4.
- A set of n payload modules is available. Due to internal volume restrictions, only modules can fit in the payload bay;
- 5.
- The n payload modules are independent. This means that they can operate independently and do not need to be connected to fulfill a single payload function.
3. Embedded Battery Tile Design and Construction
3.1. Embedded Battery Tile Prototype Design
- Low level of structural integration. As mentioned in the introduction section, a low level of structural integration between the energy storage components and the structural components was selected. Functional separation is still present in the design at a component level, between the components that implement the energy storage function and the components that implement the structural function. The electrical power system components can be clearly identified and isolated from the structural components. Nevertheless, the whole battery tile assembly performs both the energy storage and the structural function. This is known in the literature as the first degree of structural integration [12] (pp. 3–4). Superior degrees of integration introduce an increasing component-level functional integration, up to the microscopic scale. Although these degrees of integration are not applicable with a low-cost design, they would allow a considerable mass and volume optimization. They could be considered for a very high performance, non-low-cost solutions;
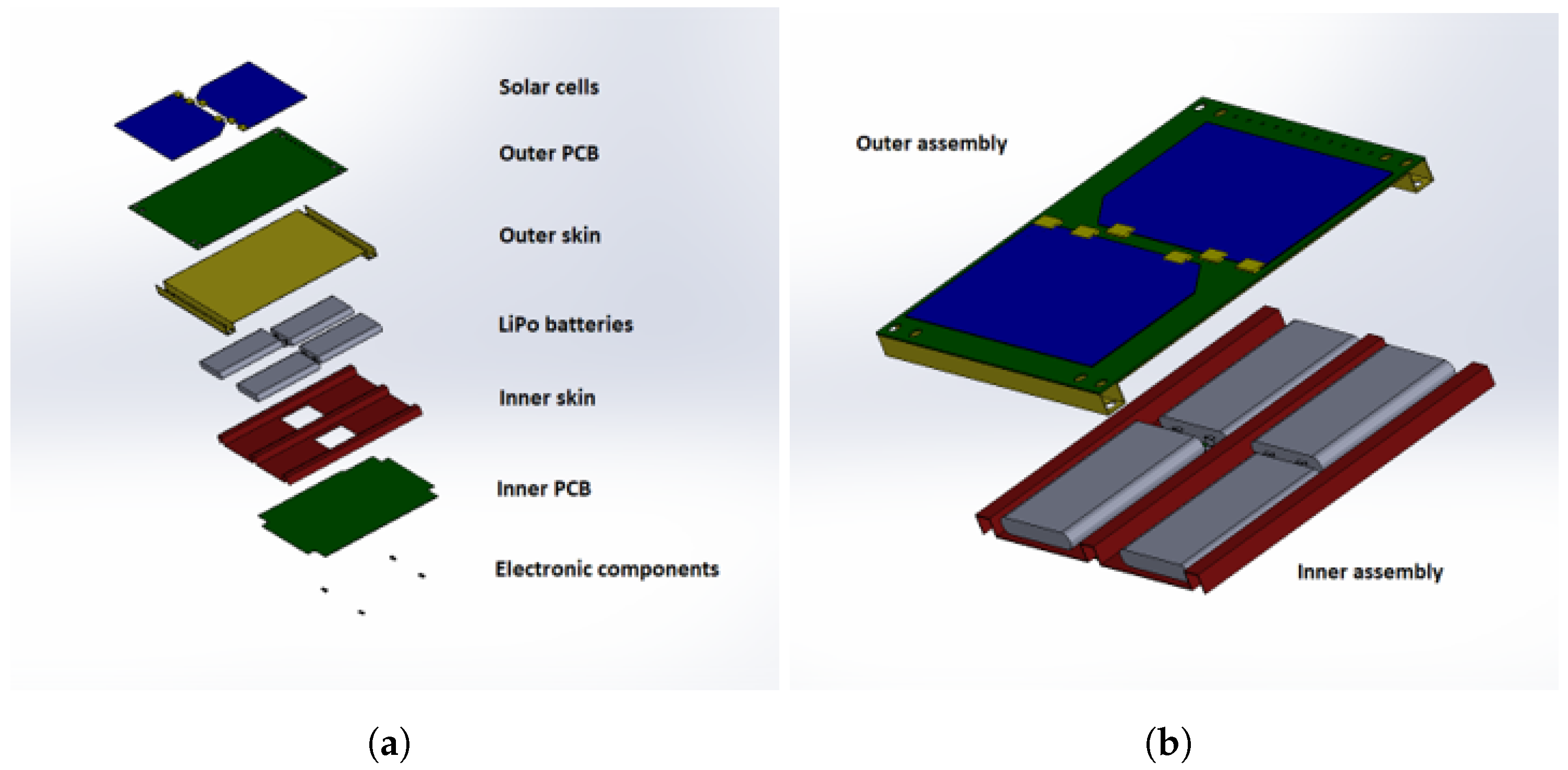
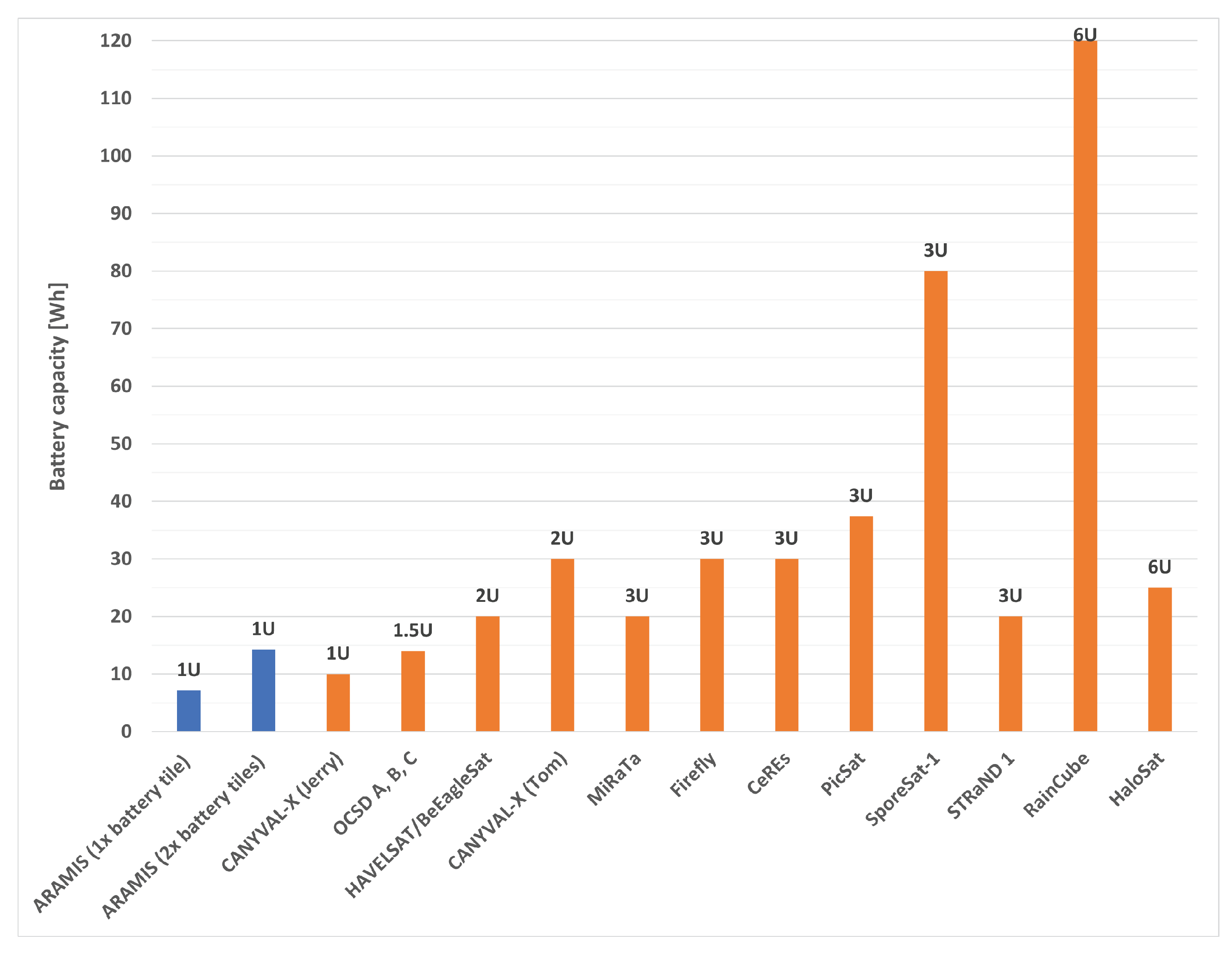
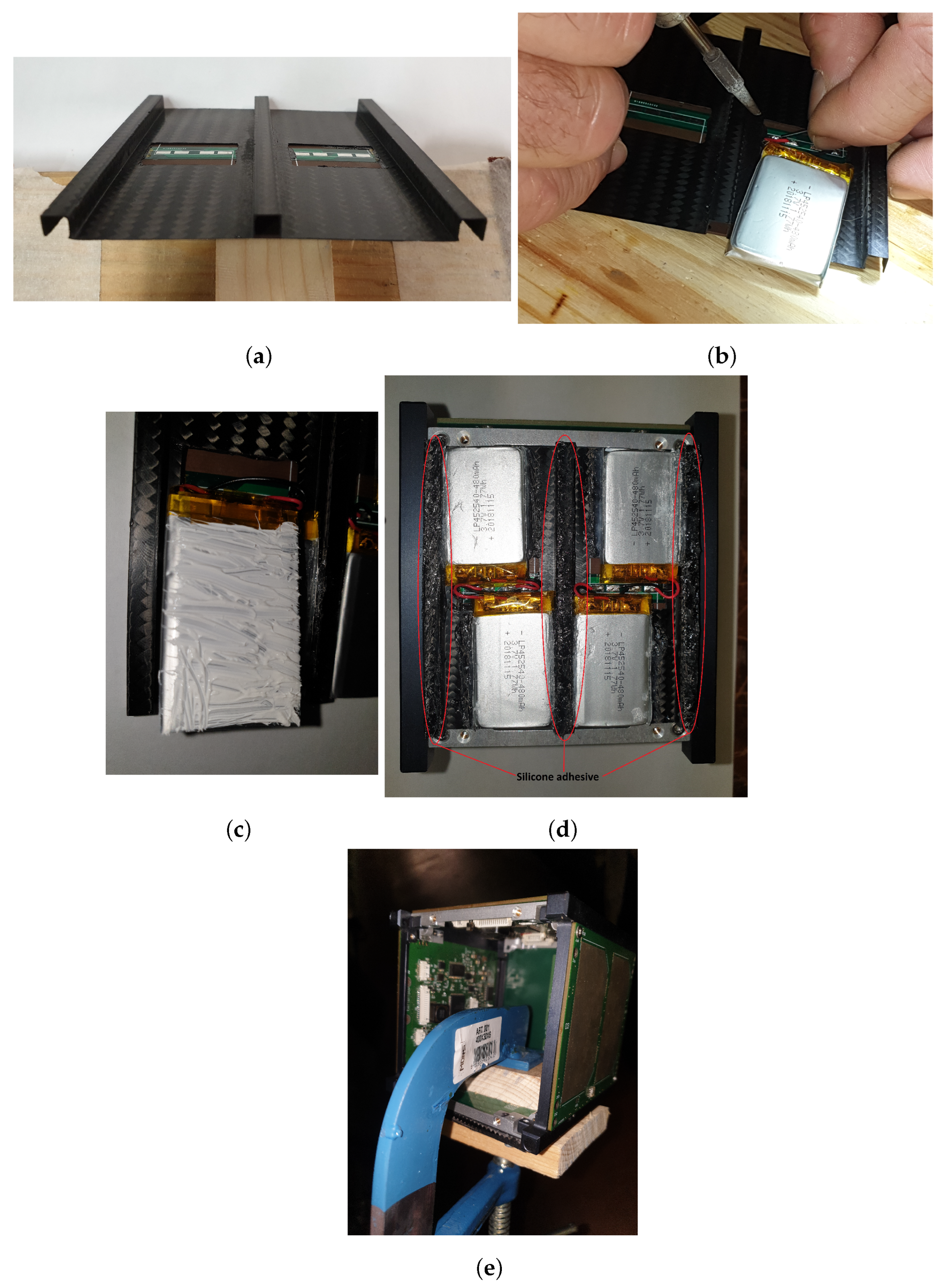
- Lithium polymer (LiPo) batteries. COTS Lithium Polymer batteries were selected based on their energy capacity and dimensions, considering the energy capacity of state-of-the-art CubeSats (Figure 7). The maximum protrusion of 6.5 mm was relevant in the selection of the battery model. LiPol LP452540 batteries were selected [23], with a nominal charge capacity of 480 mAh at 3.7 V, and thus a single battery capacity of 1.78 Wh. Four batteries were mounted on the embedded battery tile, with a total tile capacity of 7.12 Wh. This electrical energy capacity is slightly inferior to the typical capacity of state-of-the-art 1U CubeSats (Figure 7). However, since the smart tiles are modular, two or more embedded battery tiles can be mounted on the skeleton. With two battery tiles, the CubeSat capacity grows to 14.2 Wh, which is more than typical 1U satellites and comparable to the 1.5U typical capacity (14 Wh);
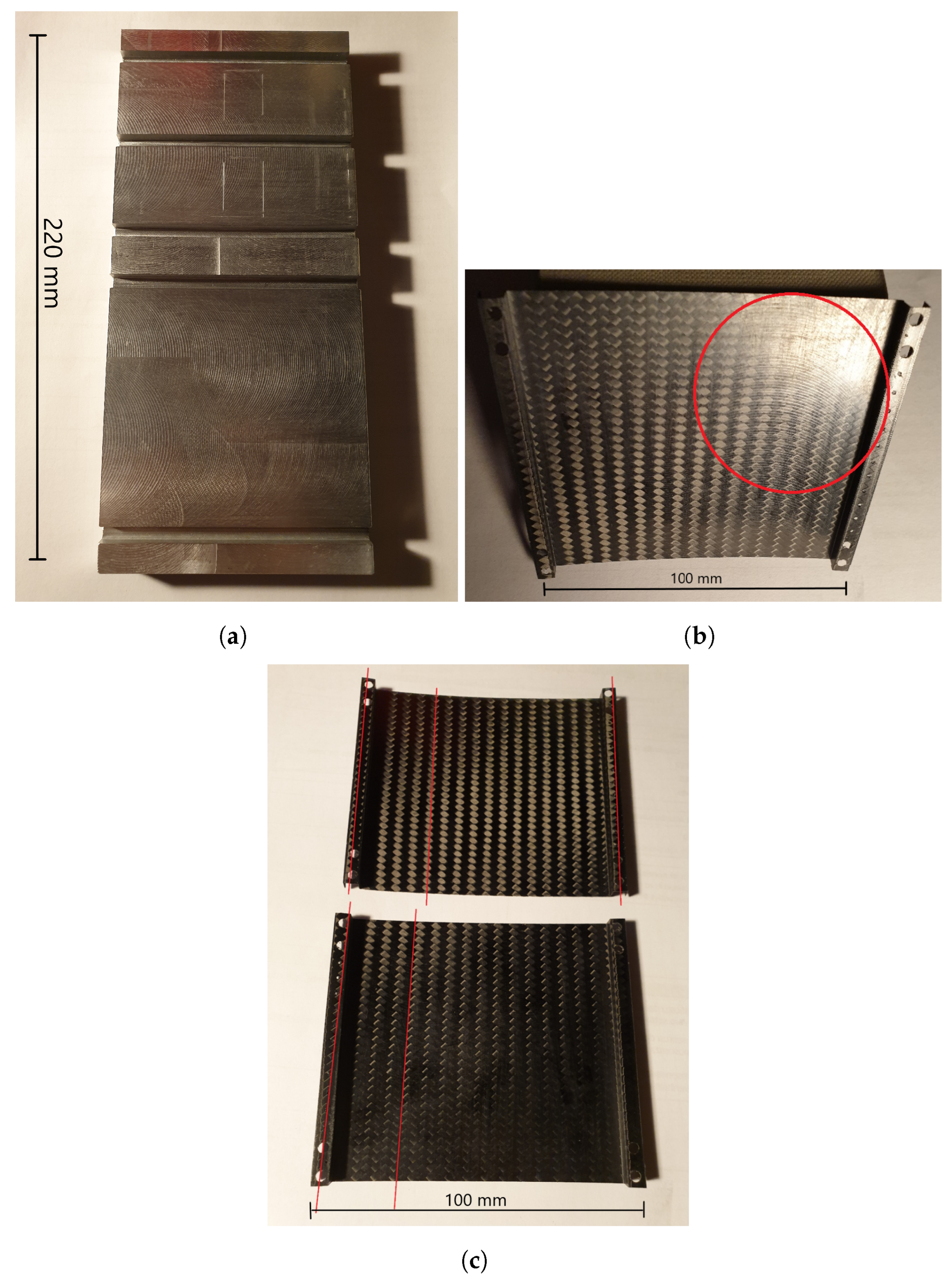
- Carbon fiber (CFRP) skins. Due to the aforementioned limitations on the total tile thickness, the two CFRP skins layup consists of a single layer of 2 × 2 twill-weave-woven carbon fabric. The layup sequence is . The CFRP material is a commercial prepreg material system and belongs to the family of the Toray/Huntsman T300/LY 564 [24,25]. Standard mold forming and autoclave curing procedures were adopted and are described below;
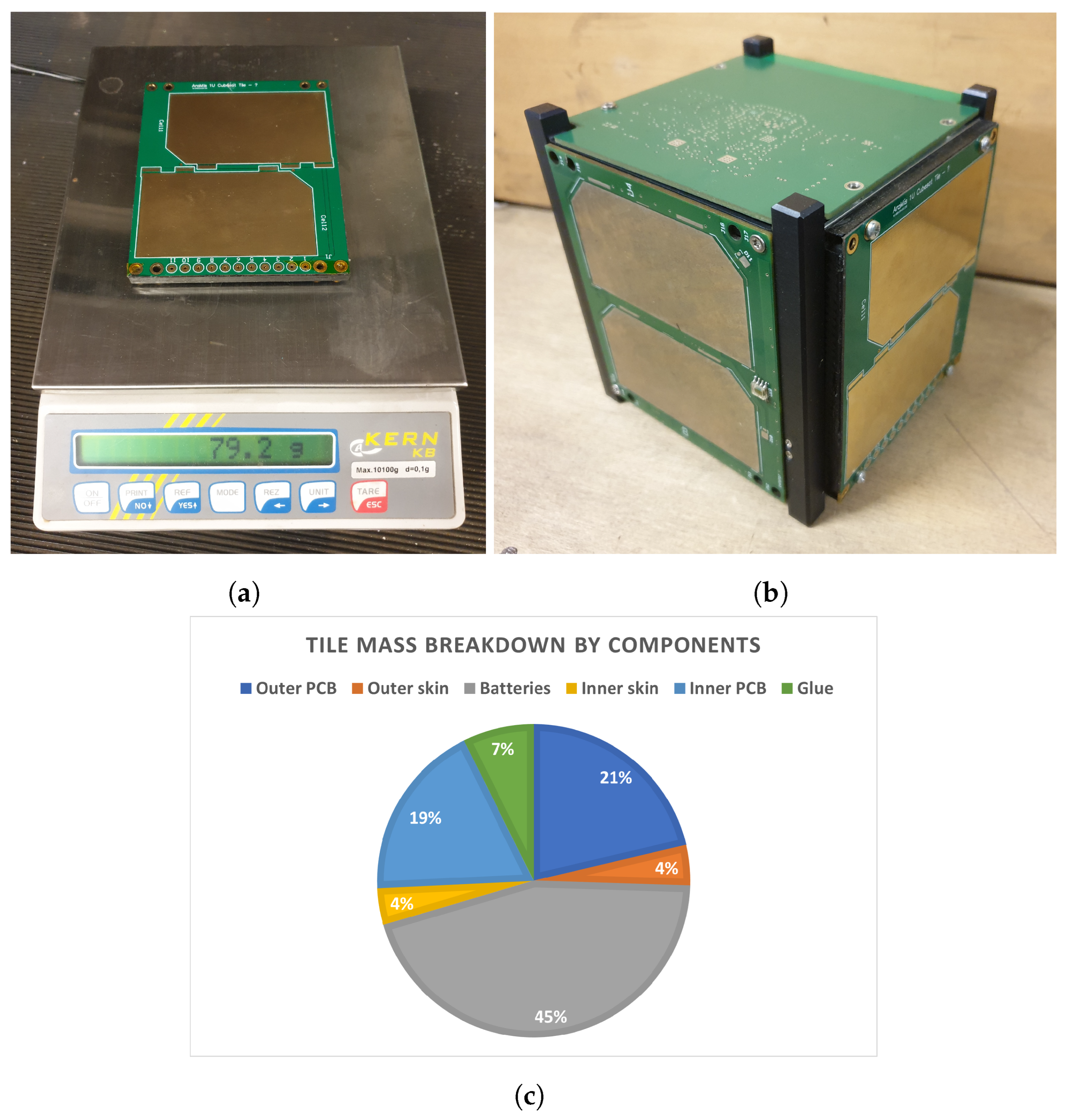
- Printed circuit boards (PCBs). The electrical power system circuitry is hosted on two COTS PCBs. The thickness of the inner PCB is 0.75 mm and the thickness of the outer PCB is 0.44 mm. From a structural point of view, the boards can be modeled as plates composed of continuous layers of copper and epoxy resin.
3.2. Embedded Battery Tile Prototype Construction
- One embedded battery tile and five PCB tiles ():
- Six embedded battery tiles ():
4. Embedded Battery Tile Modal Testing
4.1. Experimental Setup
4.2. Design of Experiment—Actuator Locations
4.3. Test Procedure
- 1.
- Correction of the mass density. The mass of each component has been measured and the density of the component in the numerical model was corrected to match the measured density. For the tile model, the mass of the epoxy and siliconic resin was neglected since the difference between the experimental mass and the numerical model mass (only due to the components) is below 10%;
- 2.
- Correction of mechanical properties—a linear modal analysis (SOL 103) was performed with the numerical models of the components. The modal analysis is conducted with free boundary conditions. The mechanical properties of the materials, i.e., aluminum, FR-4, copper, and CFRP were corrected to match the eigenfrequencies with the experimental data from the laser vibrometer, taking into account the correction of the mass density. For the complete tile model, the mechanical properties of the LiPo batteries were corrected to match with the experimental data;
- 3.
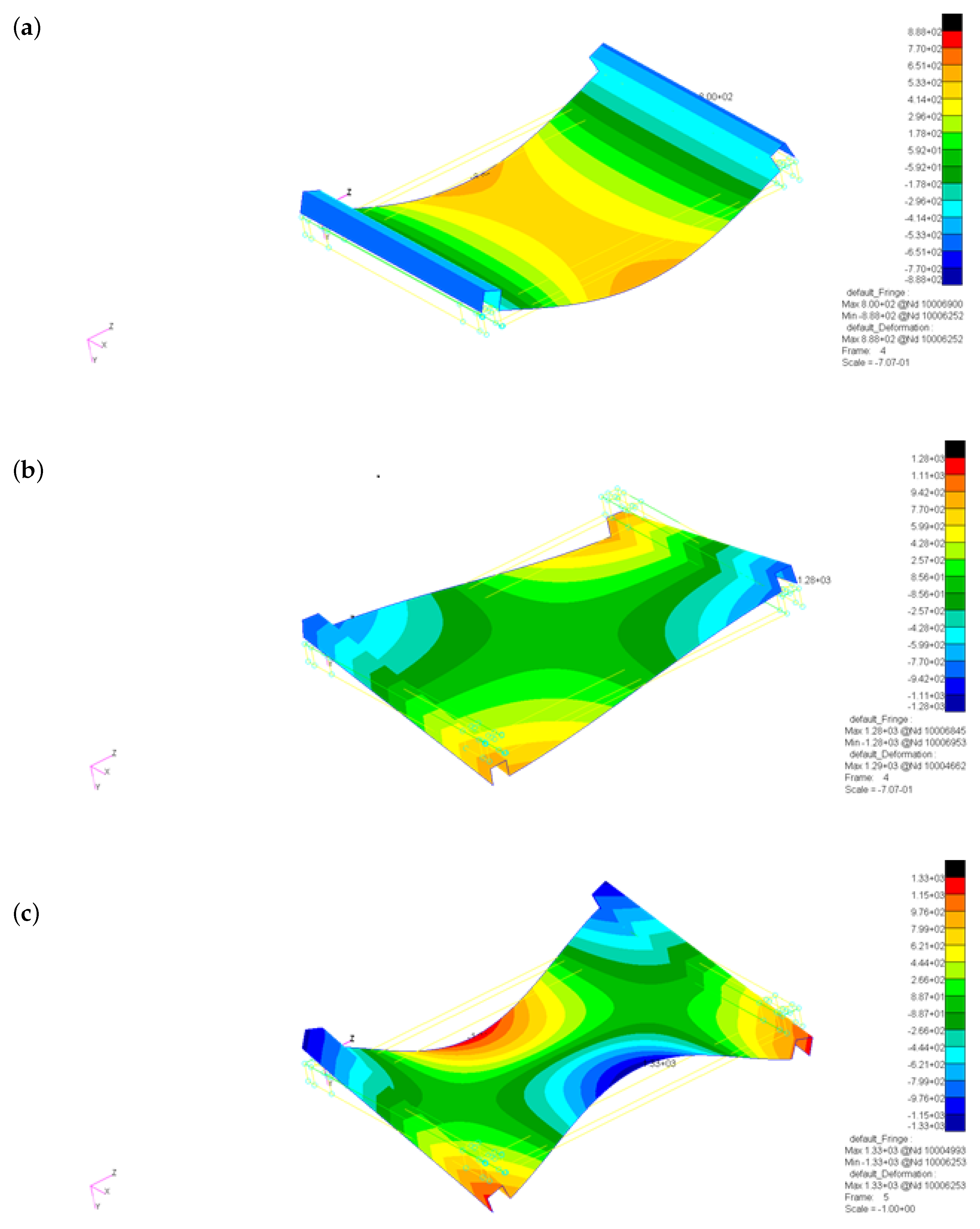
- Extraction of the experimental and numerical modes. For each component, the data from the relevant modes (at most the first five modes) were collected from the experimental and numerical results;
- 4.
- AutoMAC of experimental and numerical modes. To verify the correctness of the experimental measurements and of the numerical analyses, for each sample, an autoMAC was performed on the experimental modes and on the SOL 103 modes;
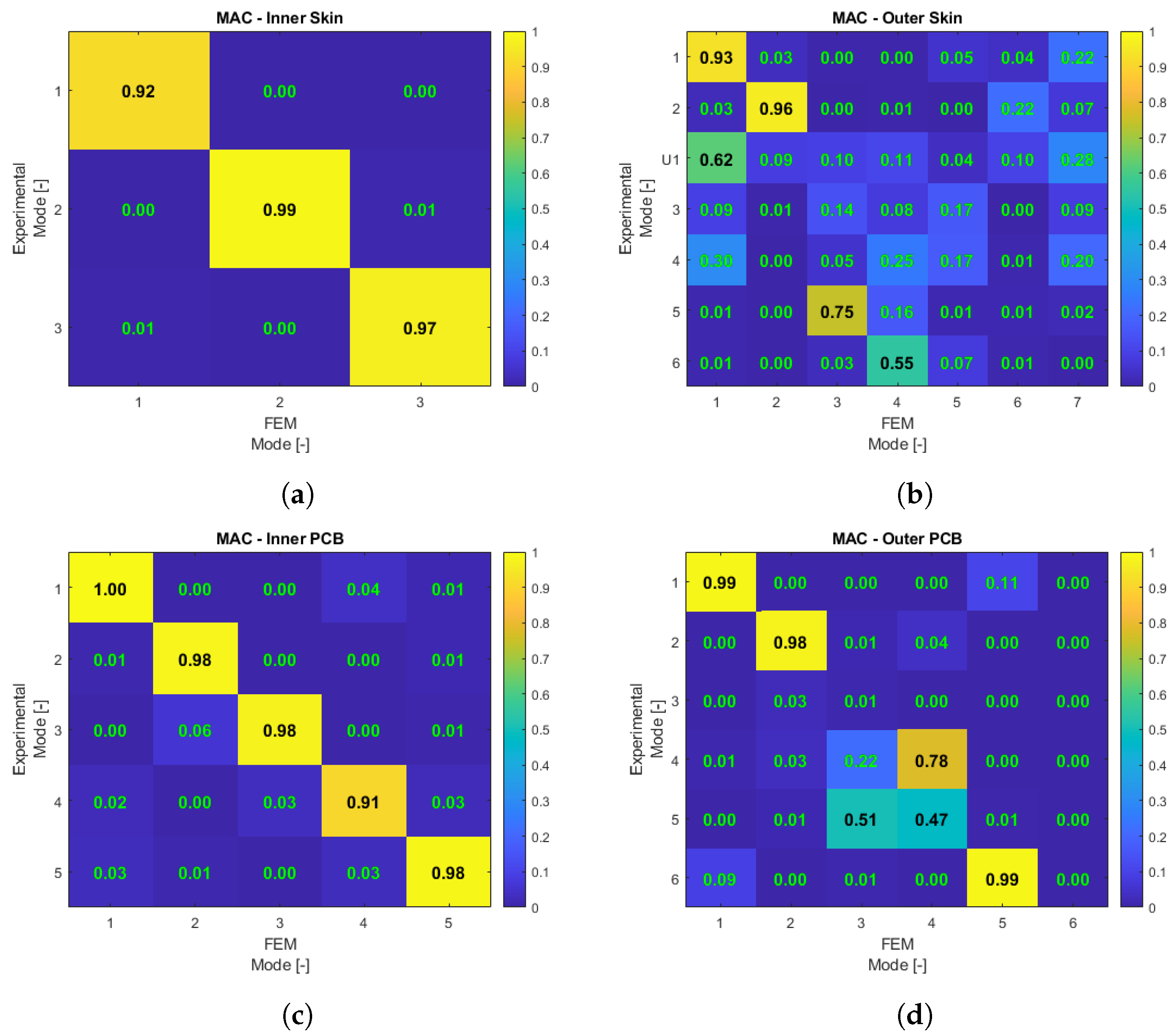
- 5.
- CrossMAC between experimental and numerical modes. Once the autoMAC step was completed, a crossMAC was performed between the experimental and the SOL 103 data [31];
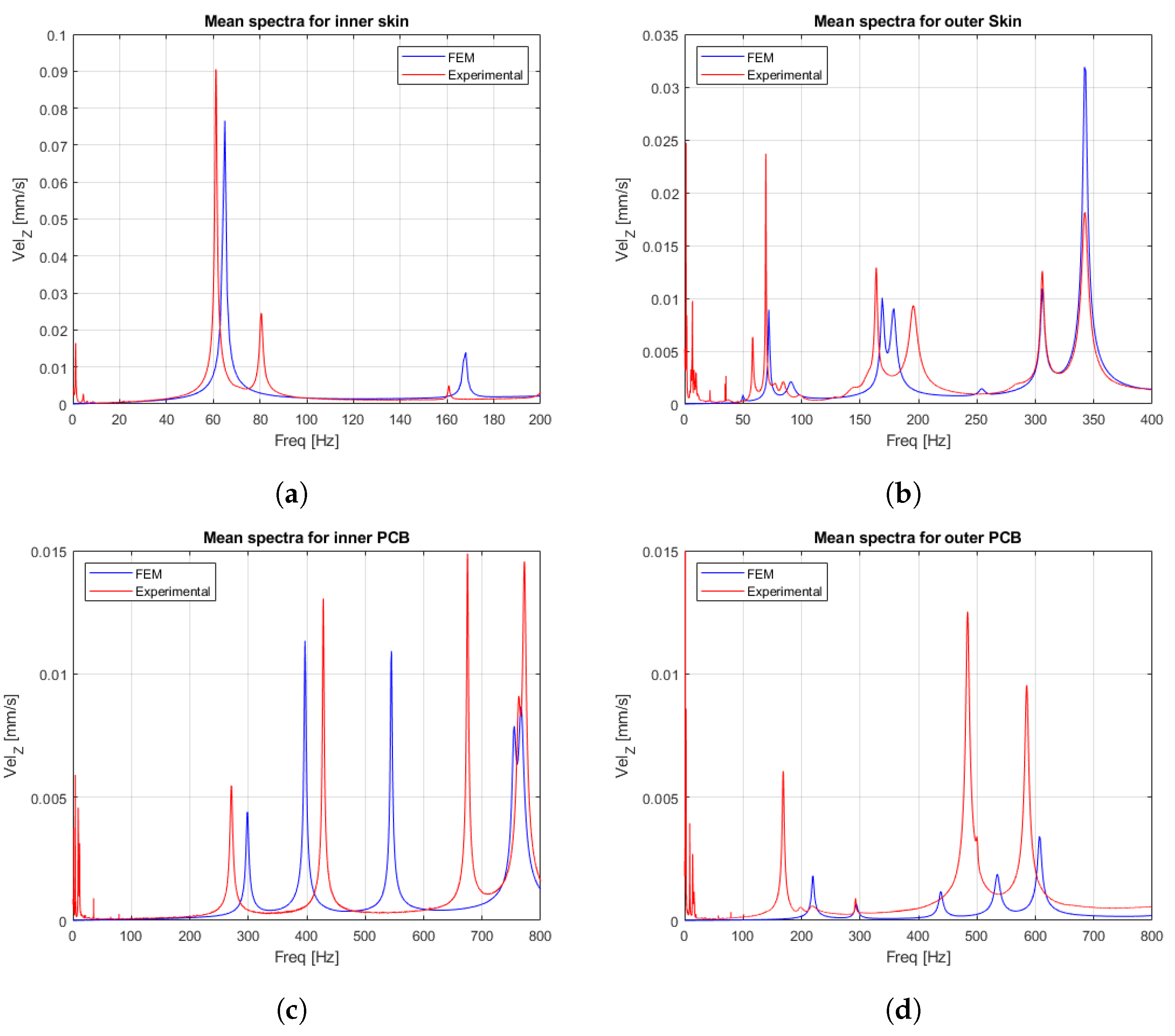
- 6.
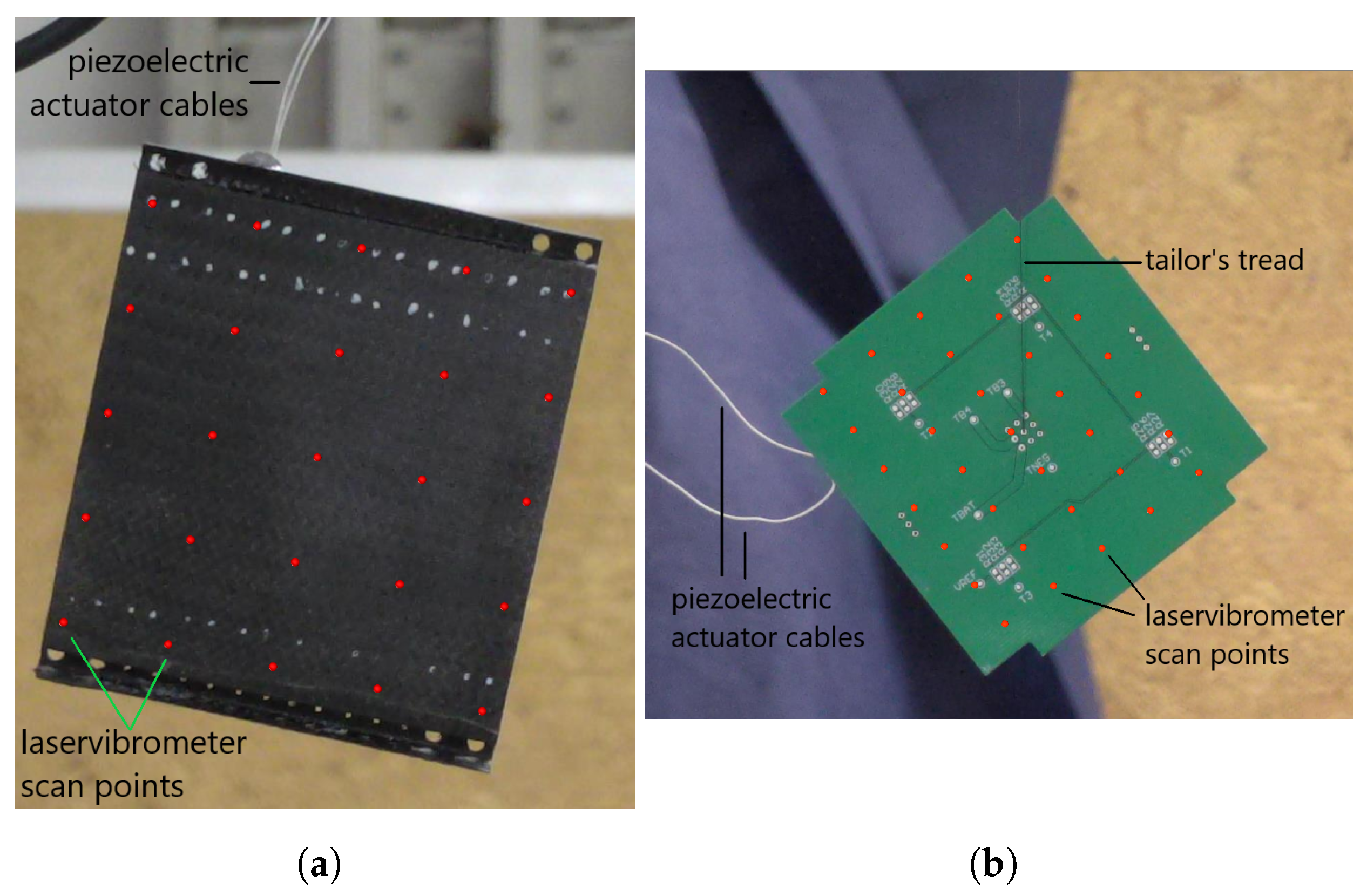
- Comparison between experimental and numerical frequency response spectra (SOL 111). Finally, a comparison between the experimental response spectra and the numerical spectra was performed. For the frequency response numerical analysis, the voltage input is the experimental voltage input given to the piezoelectric actuators. The numerical analysis considers the electrical cables of the piezoelectric actuator and not the tailor’s tread of the fixing system. The modal dampings of each target have been extracted from experimental data. The mean spectra are considered, i.e., the arithmetic averages of spectra at each measurement point.
4.4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nanosats Database. Available online: www.nanosats.eu (accessed on 4 March 2023).
- The CubeSat Program. Cubesat Design Specification Rev. 13. Technical Report. 2014. Available online: https://static1.squarespace.com/static/5418c831e4b0fa4ecac1bacd/t/56e9b62337013b6c063a655a/1458157095454/cds_rev13_final2.pdf (accessed on 4 March 2023).
- The CubeSat Program. 6U Cubsat Design Specification, Revision 1.0. Technical Report. 2018. Available online: https://static1.squarespace.com/static/5418c831e4b0fa4ecac1bacd/t/5b75dfcd70a6adbee5908fd9/1534451664215/6U_CDS_2018-06-07_rev_1.0.pdf (accessed on 4 March 2023).
- Heidt, H.; Puig-Suari, J.; Moore, A.; Nakasuka, S.; Twiggs, R. CubeSat: A new Generation of Picosatellite for Education and Industry Low-Cost Space Experimentation. In Proceedings of the 14th Annual/USU Conference on Small Satellites, Logan, UT, USA, 21–24 August 2000. [Google Scholar]
- Wang, X.; Zhang, S. Cost analysis for mass customized production of satellites based on modularity. IEEE Access 2021, 9, 13754–13760. [Google Scholar] [CrossRef]
- Areda, E.; Cordova-Alarcon, J.; Masui, H.; Cho, M. Development of Innovative CubeSat Platform for Mass Production. Appl. Sci. 2022, 12, 9087. [Google Scholar] [CrossRef]
- Kenyon, S.; Bridges, C.P.; Liddle, D.; Dyer, R.; Parsons, J.; Feltham, D.; Taylor, R.; Mellor, D.; Schofield, A.; Linehan, R. STRaND-1: Use of a $500 Smartphone as the Central Avionics of a Nanosatellite. In Proceedings of the 62nd International Astronautical Congress, Cape Town, South Africa, 7 October 2011; Available online: https://openresearch.surrey.ac.uk/esploro/outputs/99511792602346 (accessed on 1 July 2023).
- Koo, K.; Kim, H.; Dong-Geon Kim, D.; Kwon, S.; Oh, H. Lightweight Design for Active Small SAR S-STEP Satellite Using Multilayered High-Damping Carbon Fiber-Reinforced Plastic Patch. Aerospace 2023, 10, 774. [Google Scholar] [CrossRef]
- Ampatzoglou, A.; Baltopoulos, A.; Kotzakolios, A.; Kostopoulos, V. Qualification of Composite Structure for Cubesat Picosatellites as a Demonstration for Small Satellite Elements. IJASAR 2014, 1, 1–10. Available online: https://scidoc.org/articlepdfs/IJASAR/IJASAR-2470-4415-01-101.pdf (accessed on 1 July 2023).
- Asp, L.E.; Johansson, M.; Lindbergh, G.; Xu, J.; Zenkert, D. Structural battery composites: A review. Funct. Compos. Struct. 2019, 1, 042001. Available online: https://iopscience.iop.org/article/10.1088/2631-6331/ab5571/pdf (accessed on 4 March 2023). [CrossRef]
- Thomas, J.P.; Qidway, M.A.; Pogue, W.R., III; Rohatgi, A. Multifunctional structure-battery composites for marine systems. J. Compos. Mater. 2013, 47, 5–26. [Google Scholar] [CrossRef]
- Adam, T.J.; Liao, G.; Petersen, J.; Geier, S.; Finke, B.; Wierach, P.; Kwade, A.; Wiedemann, M. Multifunctional composites for future energy storage in aerospace structures. Energies 2018, 11, 335. [Google Scholar] [CrossRef]
- Hwang, J.T.; Young Lee, D.; Cutler, J.W.; Martins, J.R.R.A. Large-scale multidisciplinary optimization of a small satellite’s design and operation. J. Spacecr. Rockets 2014, 51, 1648–1663. [Google Scholar] [CrossRef]
- Speretta, S.; Reyneri, L.M.; Sansoé, C.; Tranchero, M.; Passerone, C.; Del Corso, D. Modular architecture for satellites. In Proceedings of the 58th International Astronautical Congress, Hyderabad, India, 28 September 2007. [Google Scholar]
- Johannisson, W.; Zenkert, D.; Lindbergh, G. Model of a structural battery and its potential for system level mass savings. Multifunct. Mater. 2019, 2. Available online: https://iopscience.iop.org/article/10.1088/2399-7532/ab3bdd/pdf (accessed on 6 March 2023). [CrossRef]
- Capovilla, G. Development of Next Generation Multifunctional Composite Structures for CubeSats, Pico- and Nanosatellites. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2022. [Google Scholar]
- Janson, S.W.; Welle, R.P.; Rose, T.S.; Rowen, D.W.; Hinkley, D.A.; Hardy, B.S.; La Lumondiere, S.D.; Maul, G.A.; Werner, N.I. The NASA optical communication and sensors demonstration program: Preflight up-date. In Proceedings of the 29th AIAA Conference on Small Satellites, Logan, UT, USA, 5 August 2015; Available online: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3178&context=smallsat (accessed on 6 March 2023).
- Lightholder, J.; Thoesen, A.; Adamson, E.; Jakubowski, J.; Nallapu, R.; Smallwood, S.; Raura, L.; Klesh, A.; Asphaug, E.; Thangavelatuham, J. Asteroid Origins Satellite (AOSAT) i: An On-Orbit Centrifuge Science Laboratory. Acta Astronaut. 2017, 133, 81–94. Available online: https://www.sciencedirect.com/science/article/abs/pii/S0094576515301521?via%3Dihub (accessed on 6 March 2023). [CrossRef]
- Pack, D.W.; Ardila, D.R.; Herman, E.; Rowen, D.W.; Welle, R.P.; Wiktorowicz, S.J.; Hattersley, B.W. Two aerospace corporation cubesat remote sensing imagers: CUMULOS and R3. In Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5 August 2017; Available online: https://digitalcommons.usu.edu/smallsat/2017/all2017/82/ (accessed on 6 March 2023).
- Klumpar, D.; Springer, L.; Mosleh, E.; Mashburn, K.; Berardinelli, S.; Gunderson, A.; Handley, M.; Ryhajlo, N.; Spence, H.; Smith, S.; et al. Flight system technologies enabling the twin-cubesat FIREBIRD-II scientific mission. In Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5 August 2015; Available online: https://digitalcommons.usu.edu/smallsat/2015/all2015/35/ (accessed on 6 March 2023).
- Capovilla, G.; Cestino, E.; Reyneri, L.M.; Romeo, G. Modular multifunctional composite structure for cubesat applications: Preliminary design and structural analysis. Aerospace 2020, 7, 17. Available online: https://www.mdpi.com/2226-4310/7/2/17 (accessed on 6 March 2023). [CrossRef]
- Romeo, G. Sailplane wing box design by use of graphite/aramide/epoxy material. Tech. Soar. 1981, 2, 70–75. [Google Scholar]
- LiPol. LP452540 Battery Datasheet, June 2019. Available online: https://www.lipolbattery.it/ (accessed on 29 November 2023).
- Toray Composite Materials America Inc. T300 Standard Modulus Carbon Fiber Datasheet Rev. 6. 2018. Available online: https://www.toraycma.com/wp-content/uploads/T300-Technical-Data-Sheet-1.pdf.pdf (accessed on 6 March 2023).
- Huntsman Advanced Materials. Araldite® LY 564 / Aradur® 2954 Datasheet. 2011. Available online: https://www.mouldlife.net/ekmps/shops/mouldlife/resources/Other/araldite-ly564-aradur-2954-eur-e-1-.pdf (accessed on 6 March 2023).
- Arianespace. Vega User’s Manual, Issue 4 Revision 0 2014. Available online: https://www.arianespace.com/wp-content/uploads/2018/05/Vega-Users-Manual_Issue-04_April-2014.pdf (accessed on 28 March 2023).
- Arianespace. Ariane 6 User’s Manual, Issue 2 Revision 0 2021. Available online: https://www.arianespace.com/wp-content/uploads/2021/03/Mua-6_Issue-2_Revision-0_March-2021.pdf (accessed on 5 November 2023).
- SpaceX. Falcon User’s Guide 2021. Available online: https://www.spacex.com/media/falcon-users-guide-2021-09.pdf (accessed on 5 November 2023).
- Ewins, D.J. Modal Testing: Theory, Practice and Application, 2nd ed.; Research Studies Press Ltd.: Baldock, UK, 2000. [Google Scholar]
- Côté, F.; Masson, P.; Mrad, N.; Cotoni, V. Dynamic and static modelling of piezoelectric composite structures using a thermal analogy with MSC/NASTRAN. Compos. Struct. 2004, 65, 471–484. [Google Scholar] [CrossRef]
- Allemang, R.J. The Modal Assurance Criterion–Twenty Years of Use and Abuse. Sound Vib. 2003, 37, 14–23. [Google Scholar]
- Naik, N.K.; Shembekar, P. Elastic behavior of woven fabric composites: I - lamina analysis. J. Compos. Mater. 1992, 26, 2196–2225. [Google Scholar] [CrossRef]
- Khan, H.A.; Hassan, A.; Saeed, M.B.; Mazhar, F.; Chaudhary, I.A. Finite element analysis of mechanical properties of woven composites through a micromechanics model. Sci. Eng. Compos. 2015, 24, 1–13. [Google Scholar] [CrossRef]
- Sahraei, E.; Hill, R.; Wierzbicki, T. Calibration and finite element simulation of pouch lithium-ion batteries for mechanical integrity. J. Power Sources 2012, 201, 307–321. [Google Scholar] [CrossRef]
- Romeo, G.; Cestino, E.; Pacino, M.; Borello, F.; Correa, G. Design and testing of a propeller for a two-seater aircraft powered by fuel cells. Proc. Inst. Mech. Eng. 2012, 226, 804–816. [Google Scholar] [CrossRef]
- Correa, G.; Santarelli, M.; Borello, F.; Cestino, E.; Romeo, G. Flight test validation of the dynamic model of a fuel cell system for ultra-light aircraft. Proc. Inst. Mech. Eng. 2015, 229, 917–932. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| s | |
|---|---|
| [-] | [%] |
| 1 | 4.71 |
| 2 | 9.89 |
| 3 | 15.60 |
| 4 | 21.94 |
| 5 | 29.02 |
| 6 | 36.97 |
| Mode | Frequency |
|---|---|
| [-] | [Hz] |
| 7 | 81.407 |
| 8 | 104.99 |
| 9 | 242.8 |
| Material | E | G | ||
|---|---|---|---|---|
| (-) | ||||
| Aluminum | 62.00 | 0.300 | 23.850 | 2.72 |
| FR-4 | 7.50 | 0.300 | 2.880 | 1.80 |
| Copper | 110.00 | 0.300 | 42.310 | 8.93 |
| Equivalent battery material | 0.10 | 0.300 | 0.038 | 2.50 |
| (-) | ||||
| CFRP | 28.00 | 0.044 | 2.000 | 1.54 |
| Component | Mode | Frequency | ||
|---|---|---|---|---|
| Experimental | SOL 103 | |||
| (-) | (Hz) | (%) | ||
| Inner skin | 1 | 61.13 | 64.09 | 4.9 |
| 2 | 80.50 | 81.02 | 0.6 | |
| 3 | 160.75 | 166.03 | 3.3 | |
| Outer skin | 1 | 58.25 | 55.42 | 5.1 |
| 2 | 69.50 | 72.29 | 4.0 | |
| U1 | 84.25 | - | - | |
| 3 | 163.88 | 166.32 | 1.5 | |
| 4 | 195.63 | - | - | |
| Inner PCB | 1 | 271.00 | 298.52 | 10.2 |
| 2 | 428.38 | 397.12 | 7.9 | |
| 3 | 675.00 | 544.92 | 23.9 | |
| 4 | 762.63 | 754.32 | 1.1 | |
| 5 | 772.13 | 766.83 | 0.7 | |
| Outer PCB | 1 | 168.75 | 219.47 | 30.1 |
| 2 | 292.25 | 293.71 | 0.5 | |
| 3 | 484.13 | 438.24 | 10.5 | |
| 4 | 500.00 | 535.04 | 7.0 | |
| 5 | 585.13 | 607.28 | 3.8 | |
| Mode | Frequency | ||
|---|---|---|---|
| Experimental | SOL 103 | ||
| (-) | (Hz) | (%) | |
| 1 | 460.78 | 507.94 | 10.2 |
| 2 | 814.53 | 748.68 | 8.8 |
| 3 | 953.13 | 1015.80 | 6.6 |
| 4 | 1319.22 | 1080.20 | 22.1 |
| 5 | 1439.22 | 1138.00 | 26.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capovilla, G.; Cestino, E.; Reyneri, L. Modular Multifunctional Composite Structure for CubeSat Applications: Embedded Battery Prototype Modal Analysis. Aerospace 2023, 10, 1009. https://doi.org/10.3390/aerospace10121009
Capovilla G, Cestino E, Reyneri L. Modular Multifunctional Composite Structure for CubeSat Applications: Embedded Battery Prototype Modal Analysis. Aerospace. 2023; 10(12):1009. https://doi.org/10.3390/aerospace10121009
Chicago/Turabian StyleCapovilla, Giorgio, Enrico Cestino, and Leonardo Reyneri. 2023. "Modular Multifunctional Composite Structure for CubeSat Applications: Embedded Battery Prototype Modal Analysis" Aerospace 10, no. 12: 1009. https://doi.org/10.3390/aerospace10121009
APA StyleCapovilla, G., Cestino, E., & Reyneri, L. (2023). Modular Multifunctional Composite Structure for CubeSat Applications: Embedded Battery Prototype Modal Analysis. Aerospace, 10(12), 1009. https://doi.org/10.3390/aerospace10121009