
The Effect of Torsional and Bending Stiffness on the Aerodynamic Performance of Flapping Wing


Abstract
:1. Introduction
2. Theoretical Methods
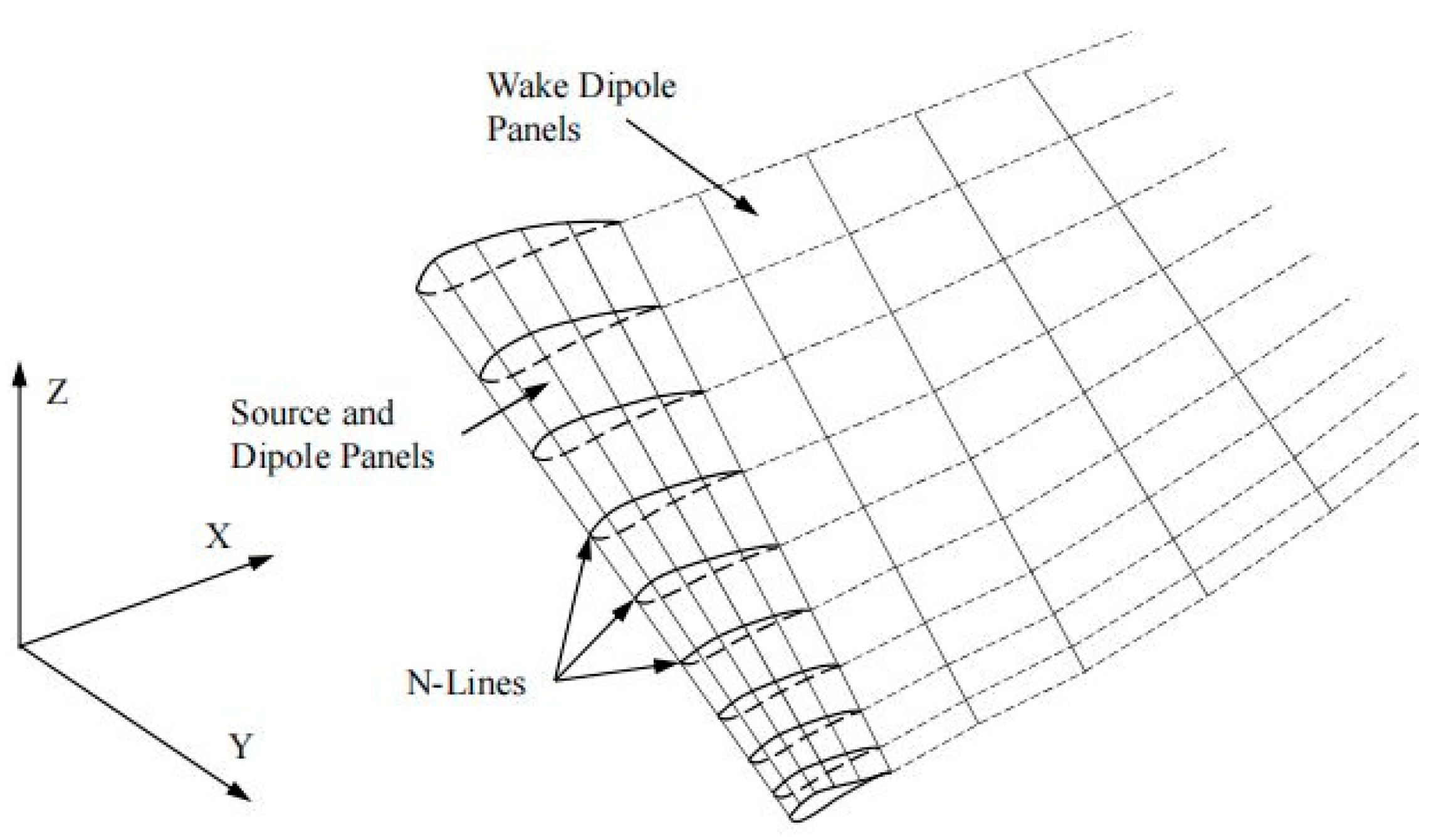
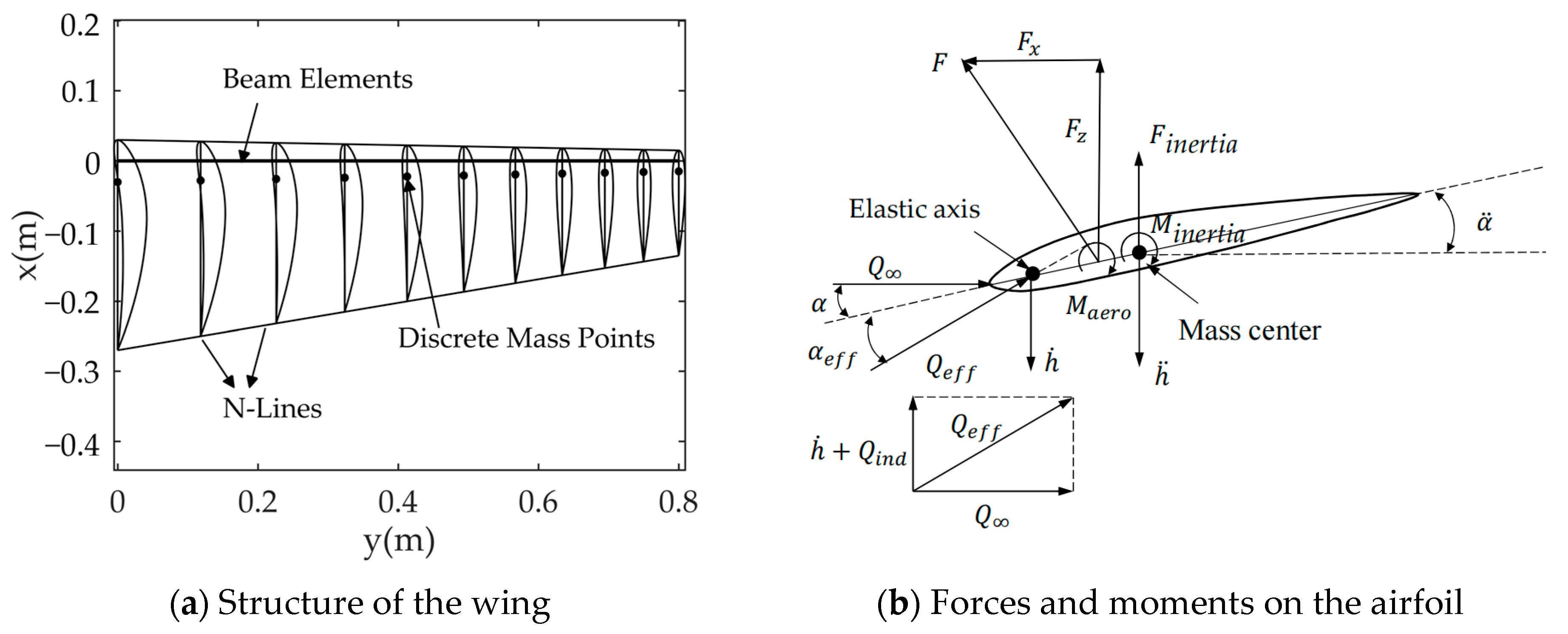
2.1. Aerodynamic Model
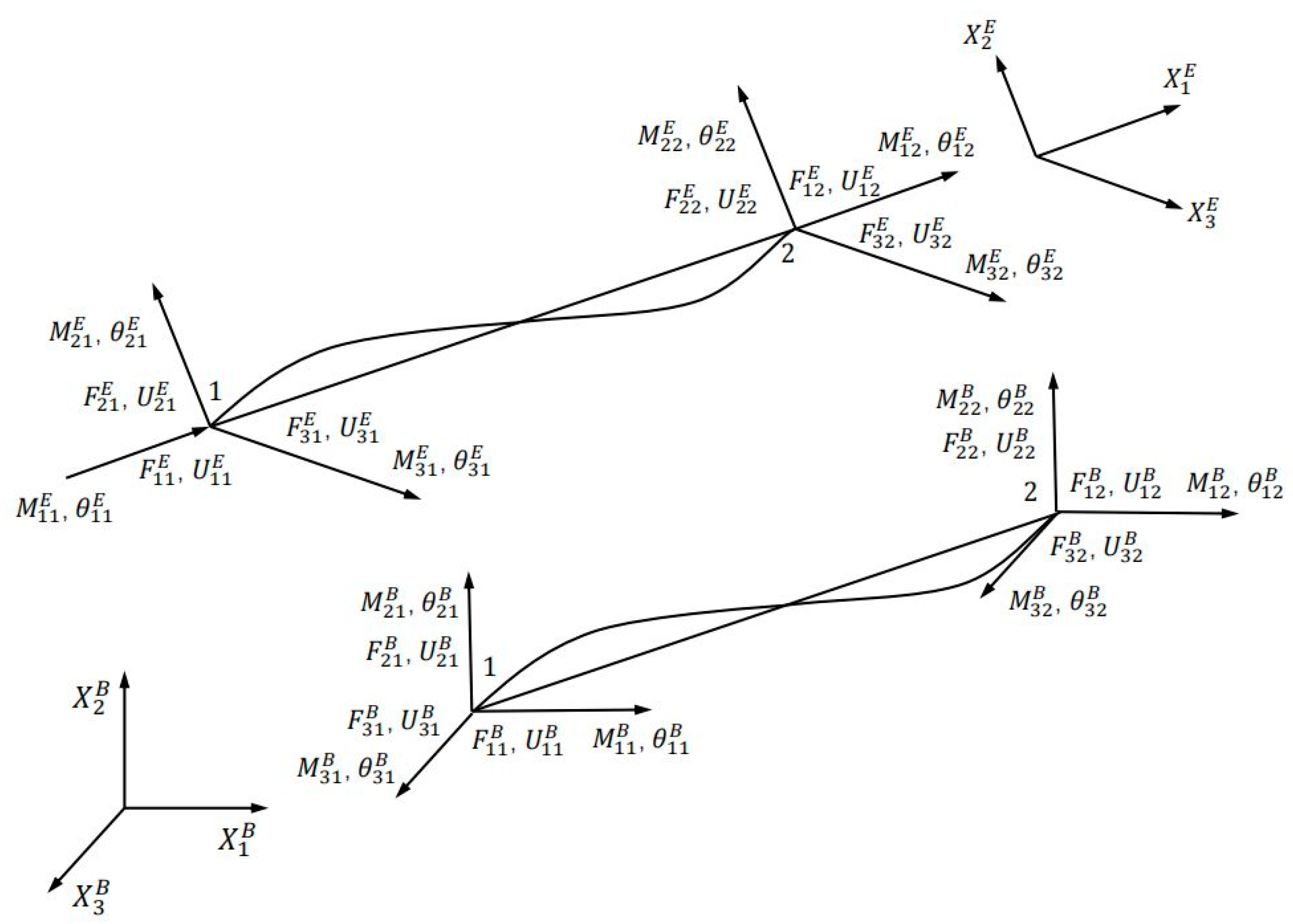
2.2. Structural Model
2.3. Aeroelastic Coupling
2.4. Performance Parameters
2.5. Solver Validation
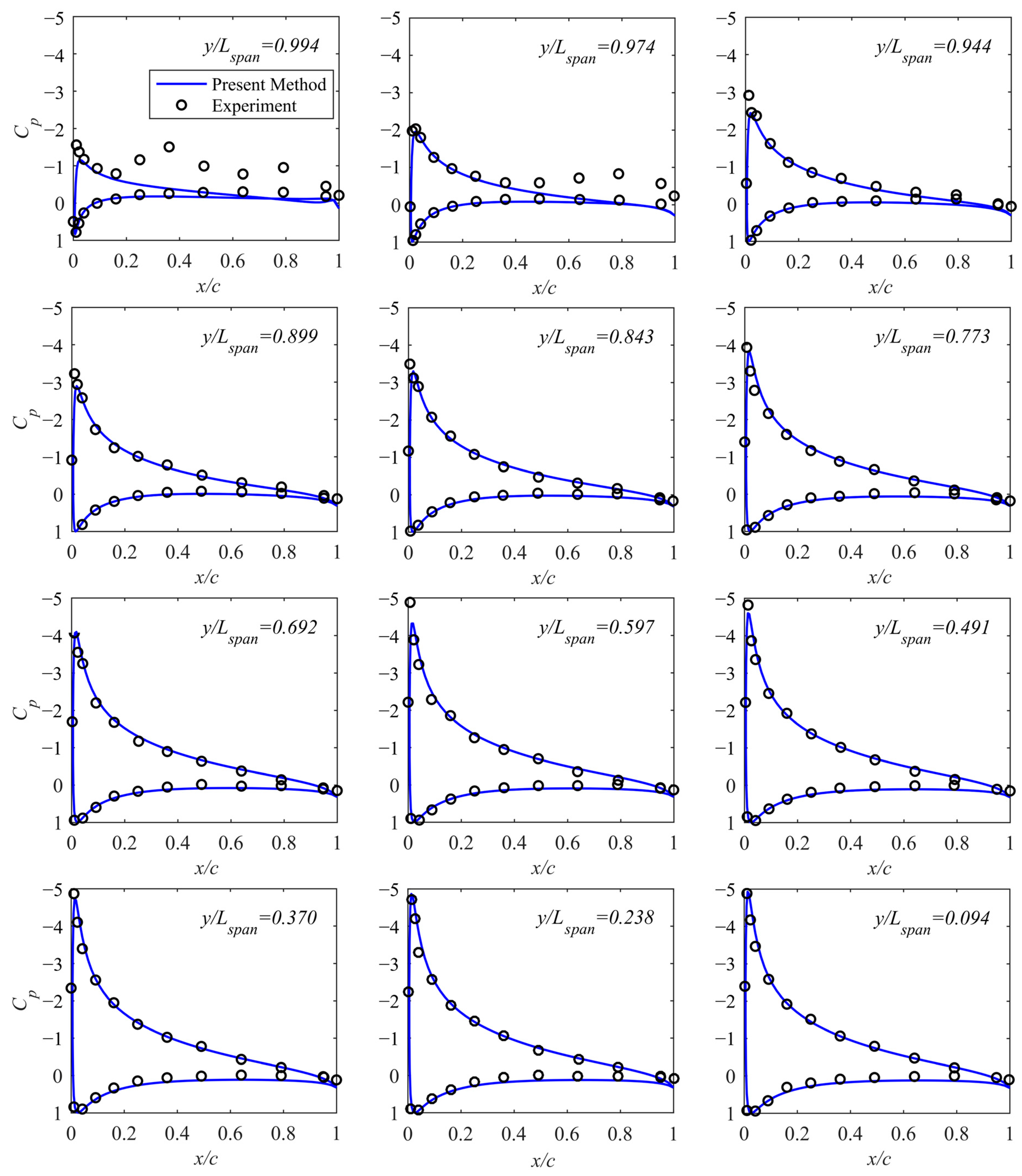
2.5.1. Aerodynamic Force
2.5.2. Geometric Nonlinearity
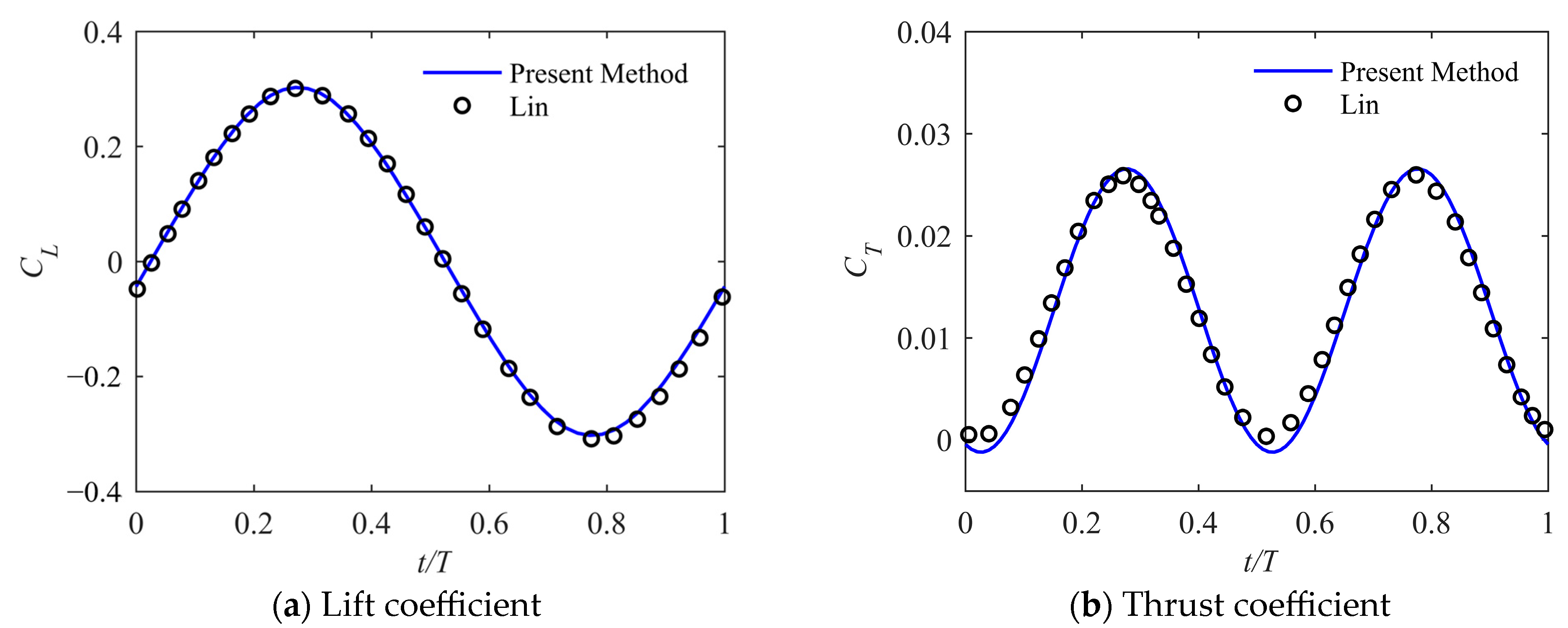
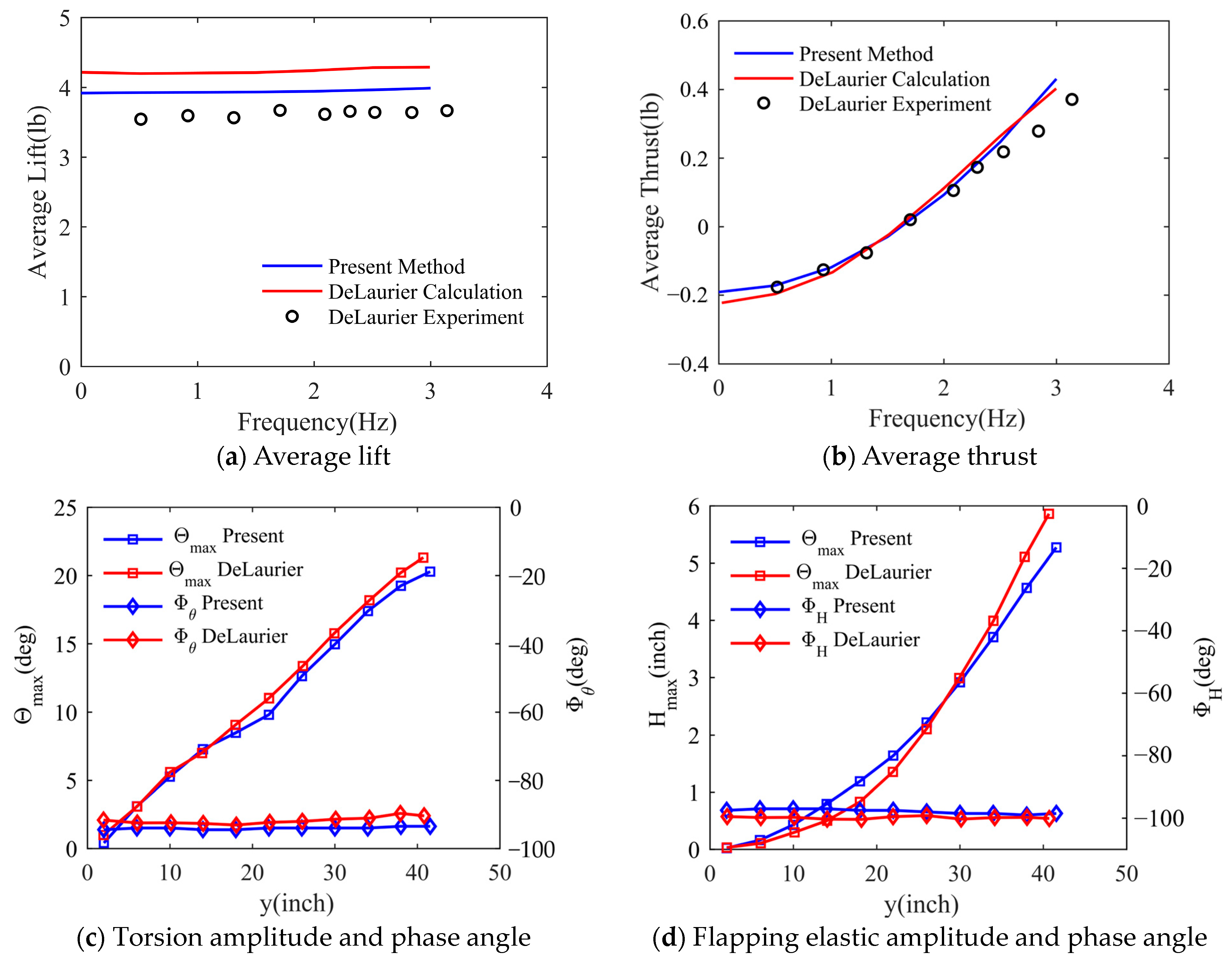
2.5.3. Fluid–Structure Coupling
3. Wing Model
3.1. Computational Model
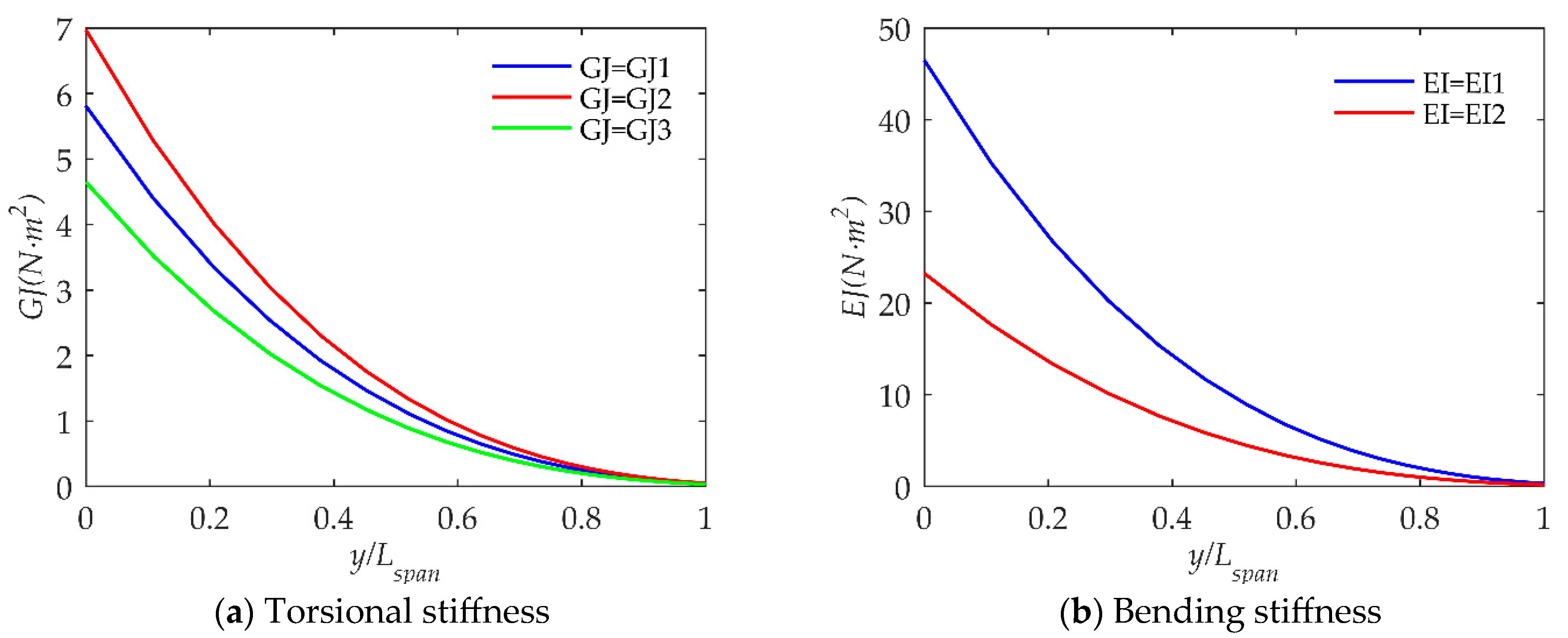
3.2. Structural and Kinematic Parameters
4. Results and Discussion
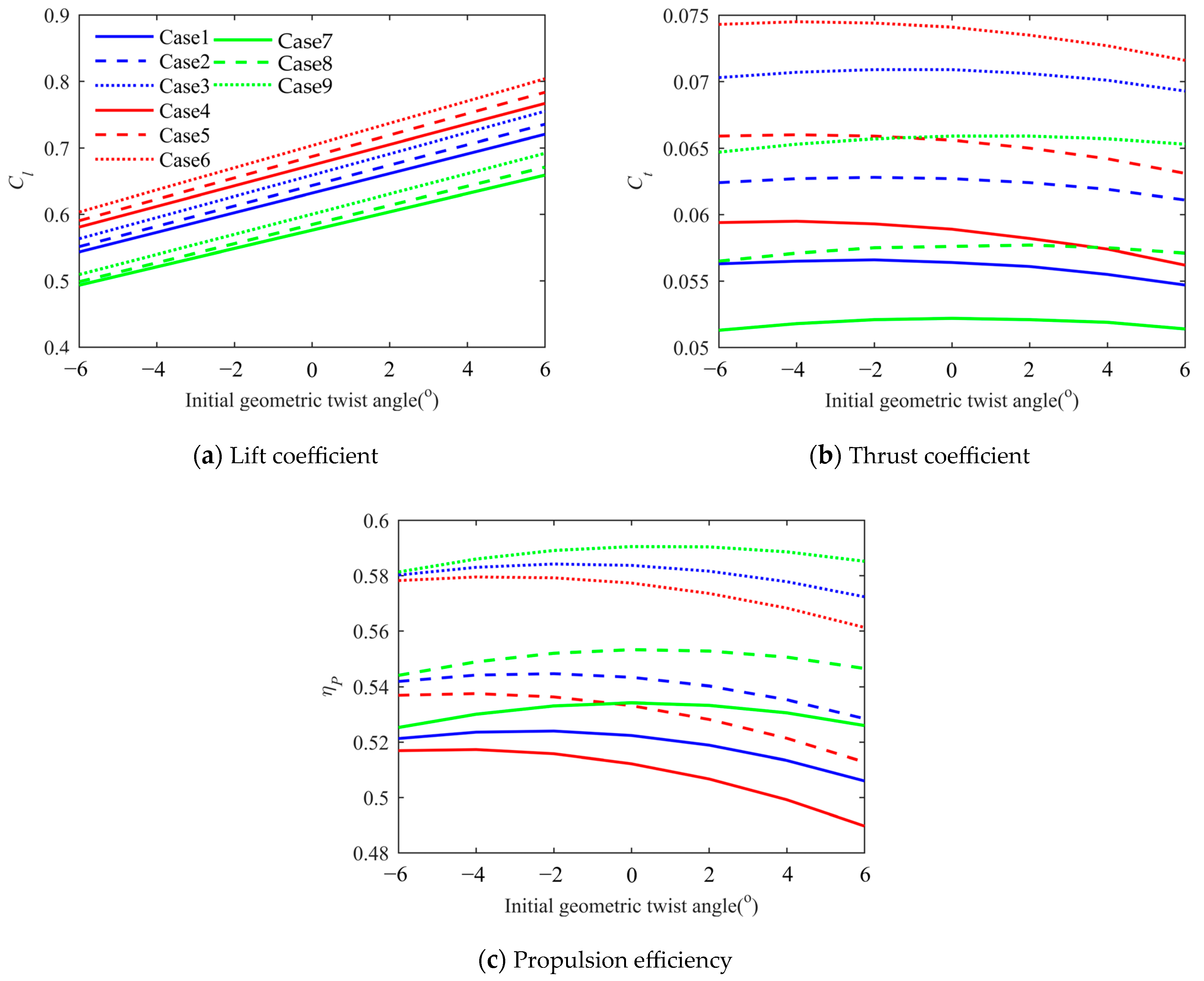
4.1. Variation of Parameters with Initial Geometric Twist Angle
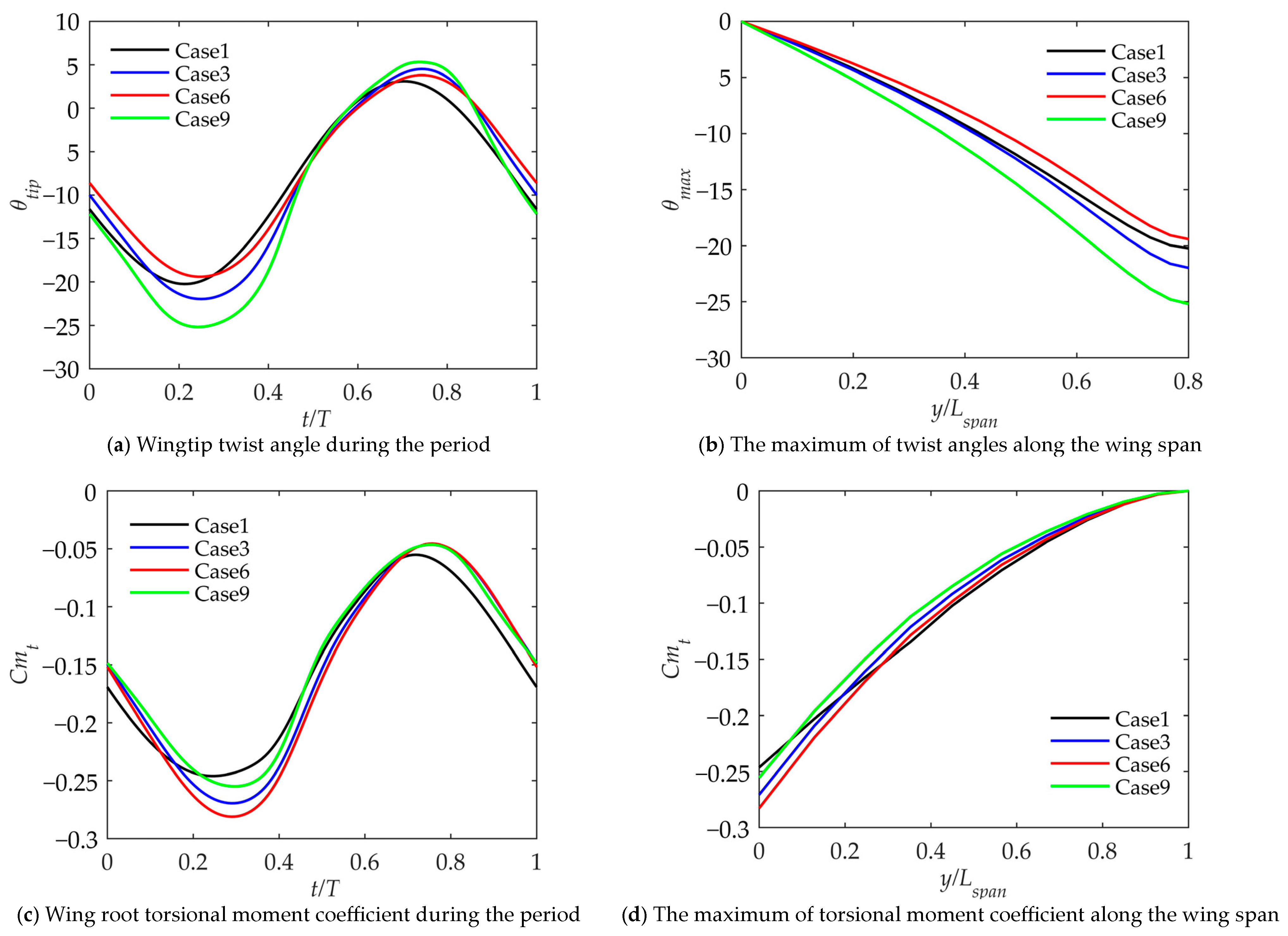
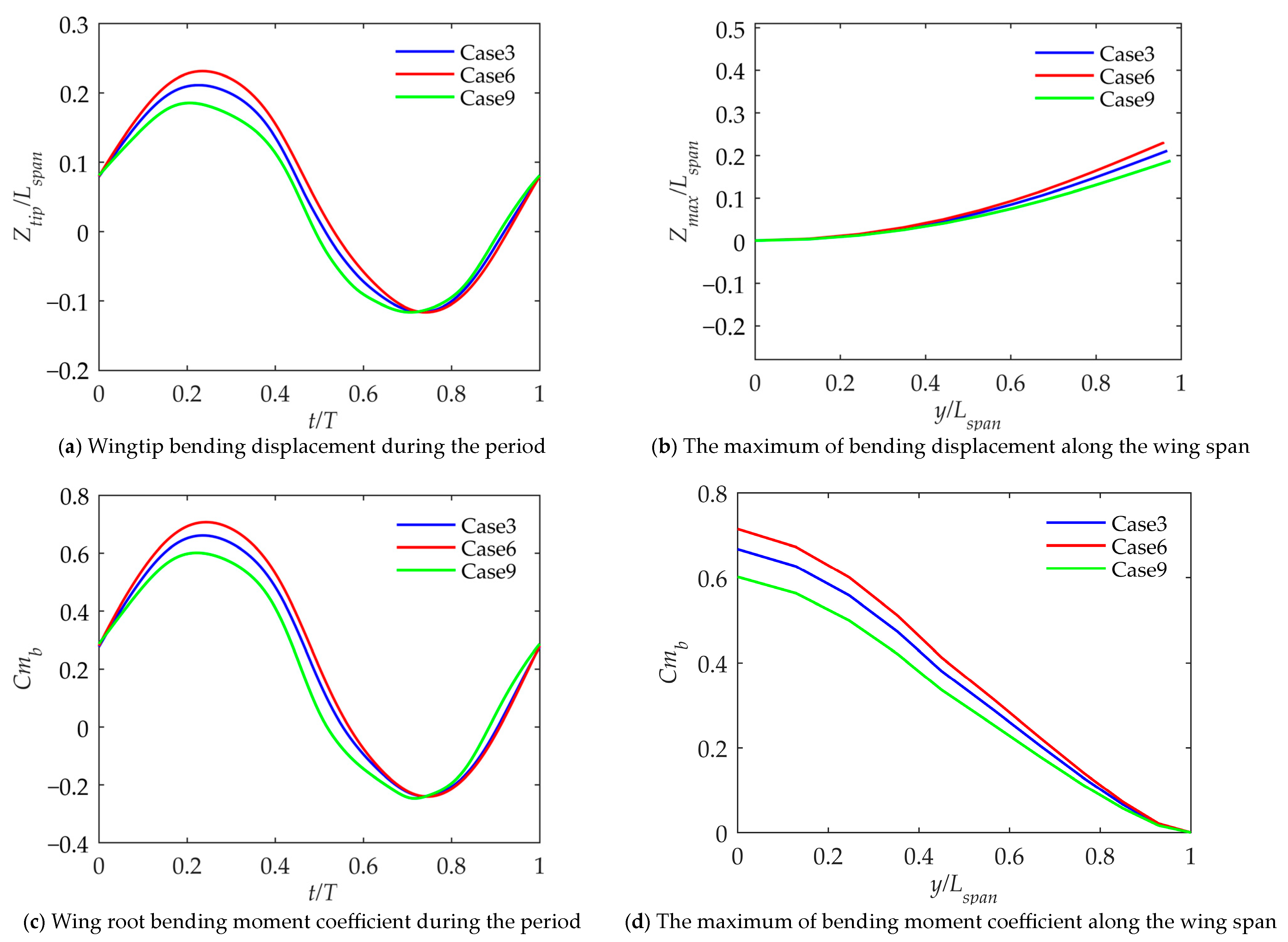
4.2. Variation of Parameters during the Period
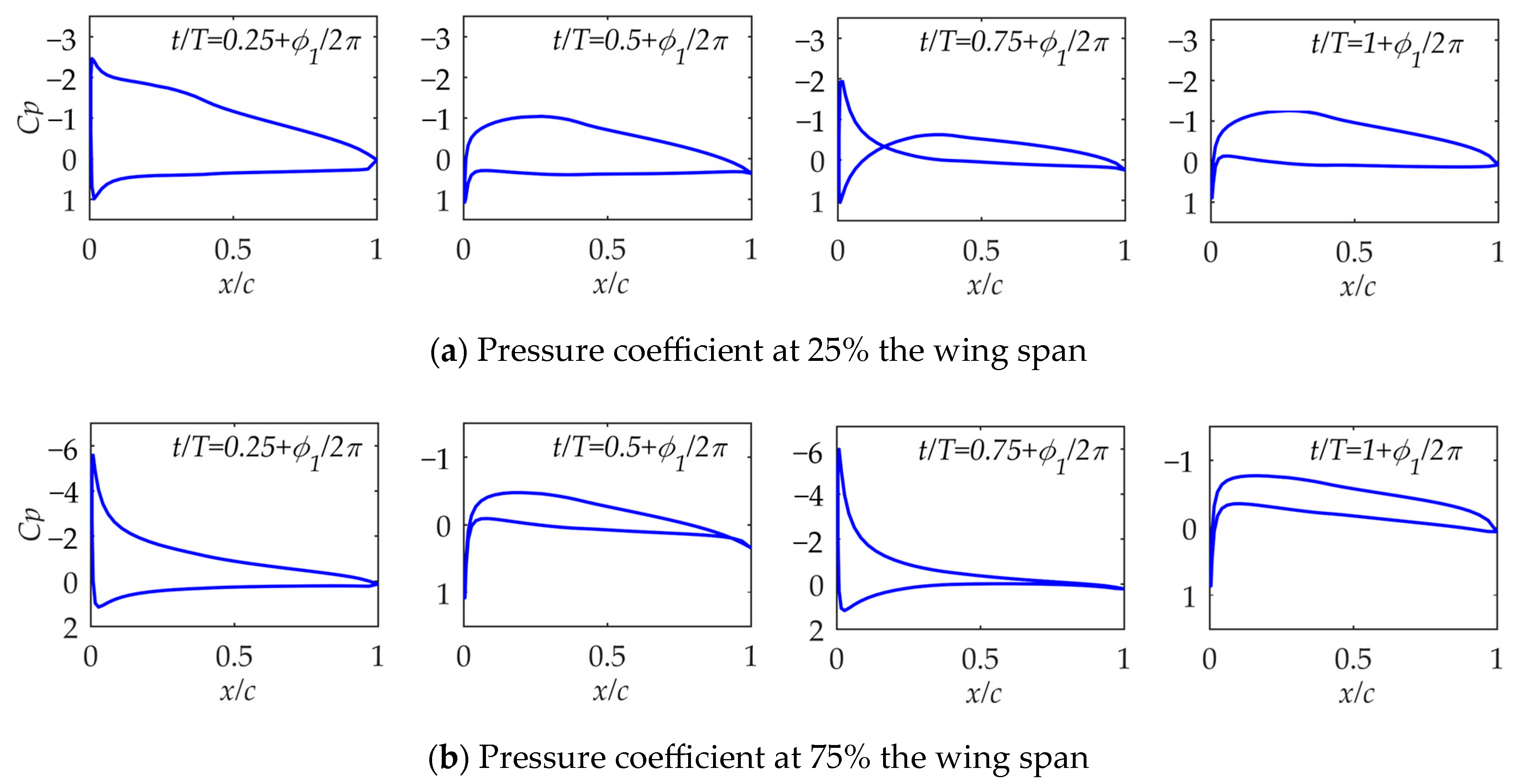
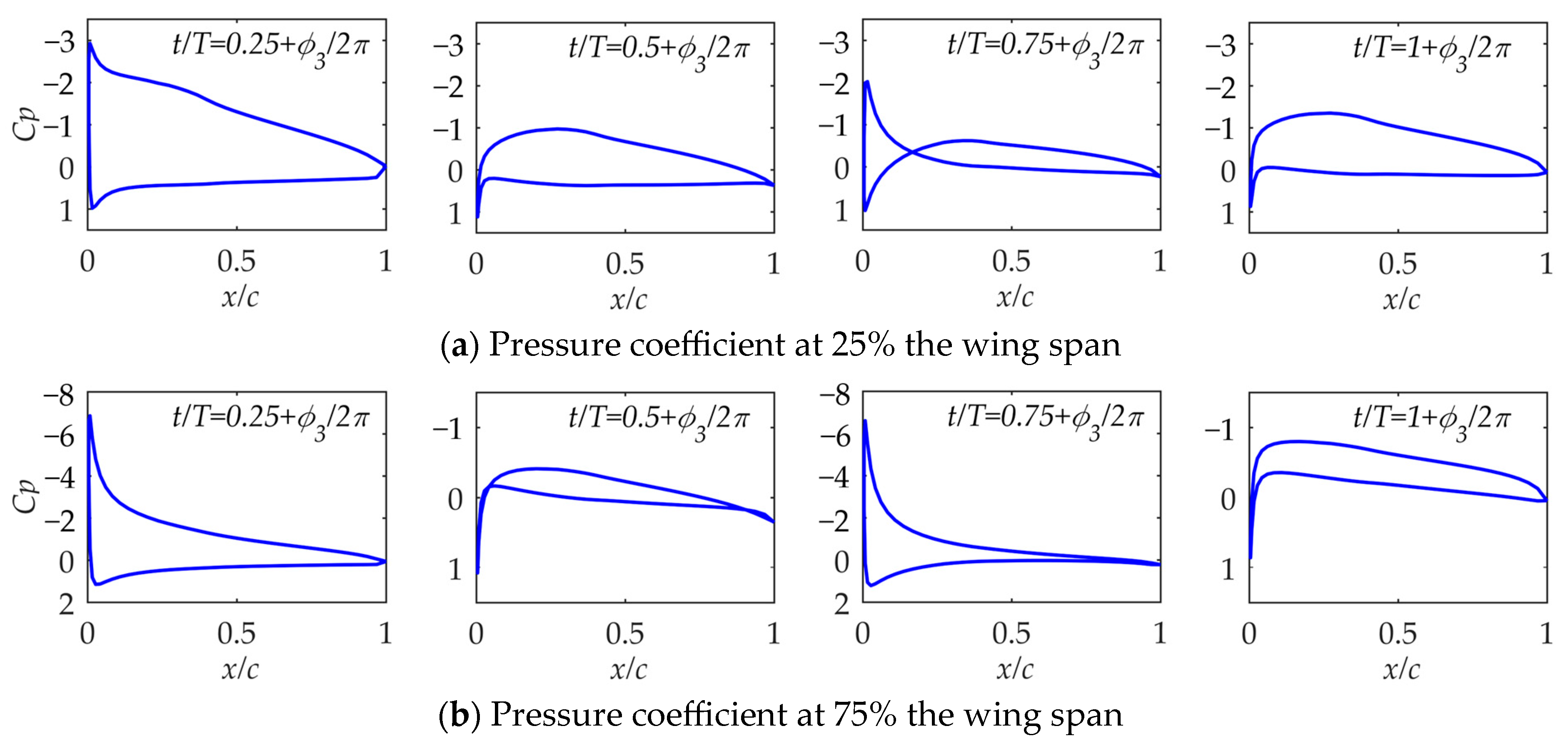
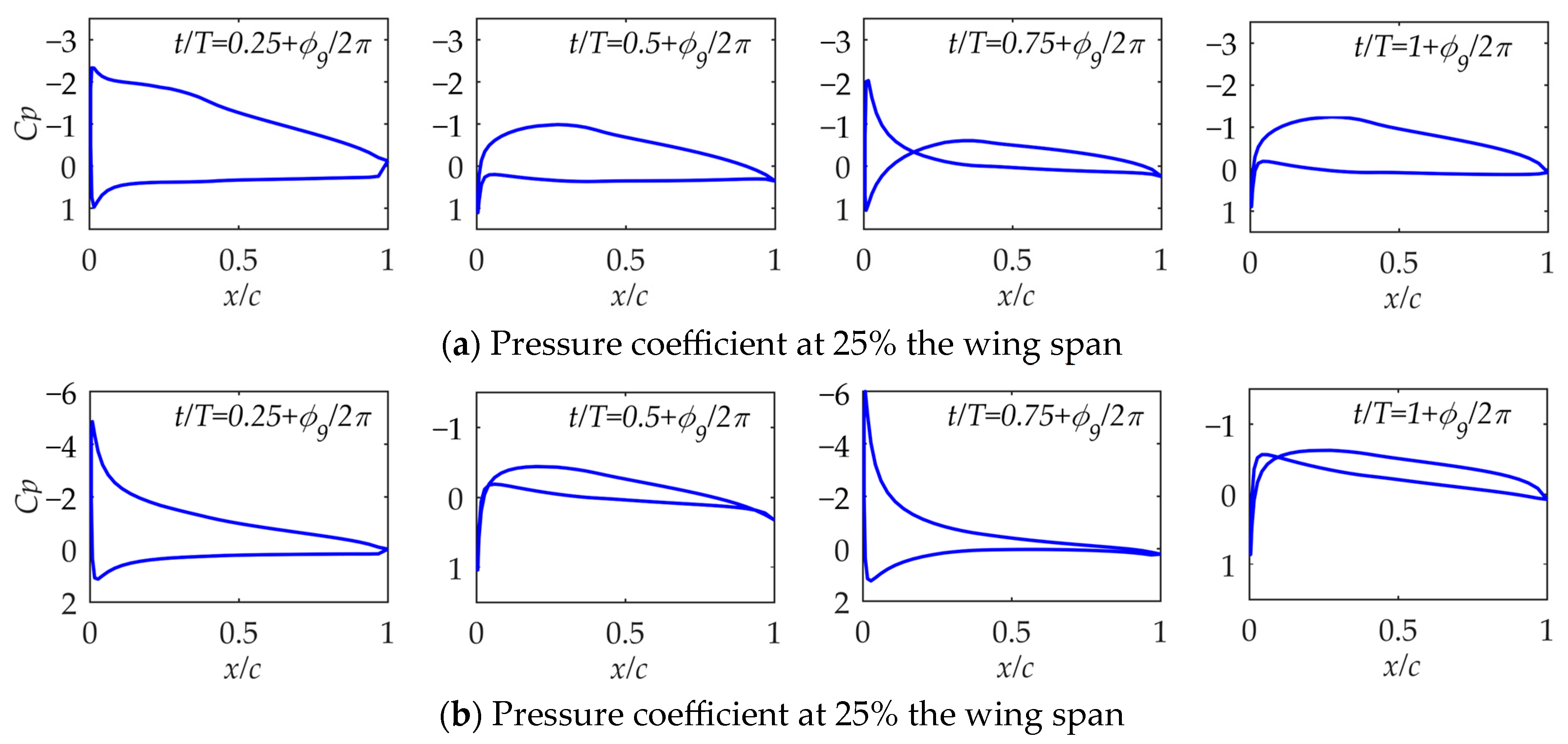
4.3. Pressure Coefficient at Different Portions during the Period
5. Conclusions
- By comparing with experiments and calculations, the method proposed in this paper has relatively high accuracy in calculating three-dimensional inviscid unsteady aerodynamic forces and three-dimensional slender geometric nonlinear beams, and is suitable for solving the problem in this article.
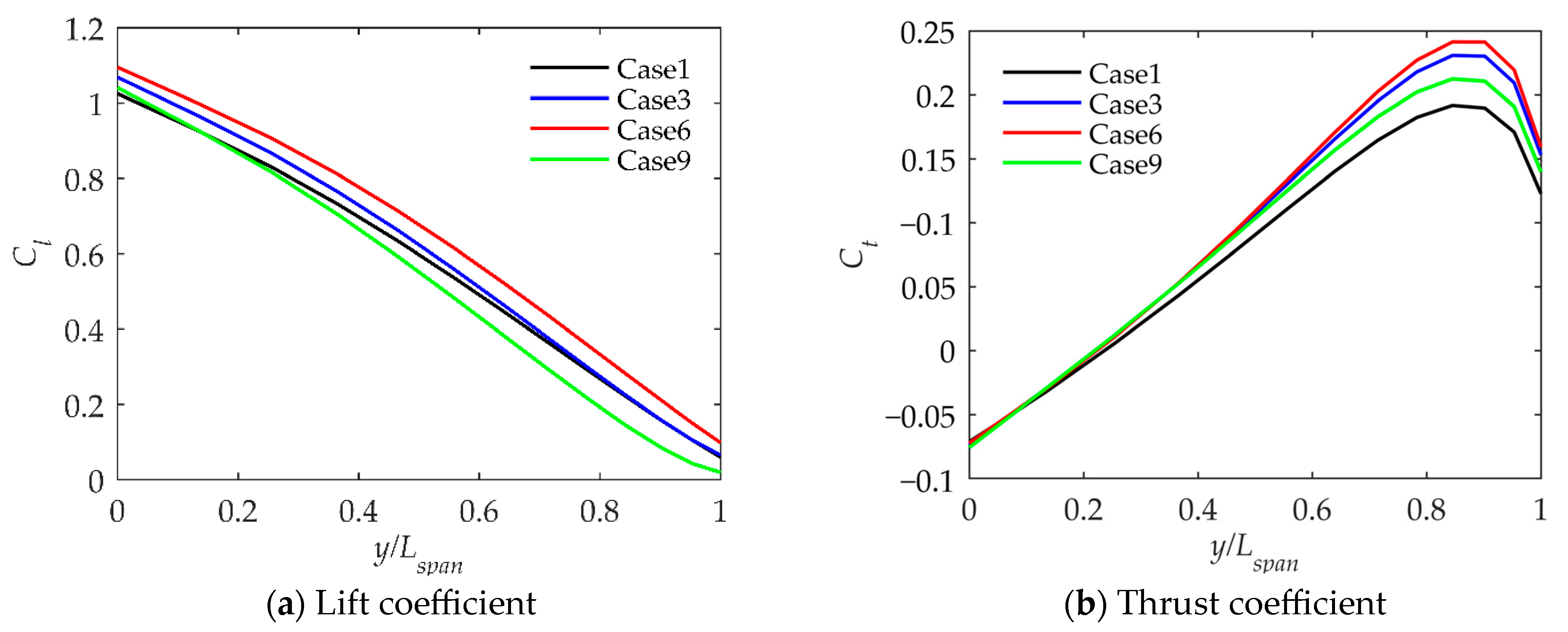
- For a passively twisted wing, an increase in torsional stiffness leads to an increase in the lift and thrust coefficients and a concomitant decrease in propulsive efficiency. This illustrates the need to make trade-offs during design.
- Under the same torsional stiffness, as the initial geometric twist angle of the wing increases, the lift coefficient increases, and the thrust coefficient and propulsion efficiency first increase and then decrease. For a certain wing torsional stiffness, there is a suitable initial geometric twist angle that maximizes propulsion efficiency. An inappropriate initial geometric twist angle will lead to an excessive angle of attack at a certain time during the period, thereby reducing propulsion efficiency.
- For a passively twisted wing, the wing is in a bending–torsion coupling state. Compared with a spanwise rigid wing, a wing with some spanwise flexibility can increase the thrust coefficient of the outer wing, making the thrust distribution along the wing span more reasonable, thereby increasing the overall thrust coefficient and propulsion efficiency.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kang, C.K.; Aono, H.; Cesnik, C.E.; Shyy, W. Effects of flexibility on the aerodynamic performance of flapping wings. J. Fluid Mech. 2011, 689, 32–74. [Google Scholar] [CrossRef]
- DeLaurier, J.D. The development of an efficient ornithopter wing. Aeronaut. J. 1993, 97, 153–162. [Google Scholar] [CrossRef]
- Smith, M.J.C. Simulation Flapping Insect Wings Using an Aerodynamic Panel Method: Towards the Development of Flapping-Wing Technology. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2005. [Google Scholar]
- Isogai, K.; Harino, Y. Optimum aeroelastic design of a flapping wing. J. Aircr. 2007, 44, 2040–2048. [Google Scholar] [CrossRef]
- Larijani, R.F.; DeLaurier, J.D. A Nonlinear Aeroelastic Model for the Study of Flapping Wing Flight. In Fixed and Flapping Wing Aerodynamics for Micro Aerial Vehicle Applications; Mueller, T.J., Ed.; AIAA: Reston, VA, USA, 2001; pp. 399–428. [Google Scholar]
- Reichert, T. Kinematic Optimization in Birds, Bats and Ornithopters. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2011. [Google Scholar]
- Wang, Z.; Kan, Z.; Li, H.; Li, D. Parametric Study on Aerodynamic Performance of a Flapping Wing Rotor MAV Capable of Sustained Flight. Aerospace 2022, 9, 551. [Google Scholar] [CrossRef]
- Wu, Y.; Xie, C.; Meng, Y.; Yang, C. Kinematic Optimization of a Flexible Wing Undergoing Flapping and Pitching. Shock Vib. 2021, 2021, 9635584. [Google Scholar] [CrossRef]
- Heathcote, S.; Wang, Z.; Gursul, I. Effect of spanwise flexibility on flapping wing propulsion. J. Fluids Struct. 2008, 24, 183–199. [Google Scholar] [CrossRef]
- Aono, H.; Chimakurthi, S.; Cesnik, C.; Liu, H.; Shyy, W. Computational Modeling of Spanwise Flexibility Effects on Flapping Wing Aerodynamics. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Kodali, D.; Medina, C.; Kang, C.K.; Aono, H. Effects of spanwise flexibility on the performance of flapping flyers in forward flight. J. R. Soc. Interface 2017, 14, 20170725. [Google Scholar] [CrossRef] [PubMed]
- Lankford, J.L.; Chopra, I. Coupled aeroelastic study of a flexible micro air vehicle-scale flapping wing in hovering flight. J. Aircr. 2022, 59, 154–172. [Google Scholar] [CrossRef]
- Yang, X.; Sudhir, A.; Halder, A.; Benedict, M. Nonlinear Aeroelastic Analysis for Highly Flexible Flapping Wing in Hover. J. Am. Helicopter Soc. 2022, 67, 1–15. [Google Scholar] [CrossRef]
- Yang, X.W.; Song, B.F.; Yang, W.Q.; Xue, D.; Pei, Y.; Lang, X.Y. Study of aerodynamic and inertial forces of a dovelike flapping-wing MAV by combining experimental and numerical methods. Chin. J. Aeronaut. 2022, 35, 63–76. [Google Scholar] [CrossRef]
- Winslow, J.; Otsuka, H.; Govindarajan, B.; Chopra, I. Basic understanding of airfoil characteristics at low Reynolds numbers (104–105). J. Aircr. 2018, 55, 1050–1061. [Google Scholar] [CrossRef]
- Magnus, A.E.; Epton, M.A. PAN AIR A Computer Program for Predicting Subsonic or Supersonic Linear Potential Flows about Arbitrary Configurations Using a Higher Order Panel Method; Volume 1: Theory Document (Version 1.1); Technical Report No. NASA-CR-3251; NASA: Washington, DC, USA, 1981.
- Ashby, D.L. Potential Flow Theory and Operation Guide for the Panel Code PMARC; Technical Report No. A-00V0005; NASA: Washington, DC, USA, 1999.
- Maskew, B. Program VSAERO Theory Document: A Computer Program for Calculating Nonlinear Aerodynamic Characteristics of Arbitrary Configurations; Technical Report No. NASA 1.26: 4023; NASA: Washington, DC, USA, 1987.
- Johnson, F.T. A General Panel Method for the Analysis and Design of Arbitrary Configurations in Incompressible Flows; Technical Report No. NASA-CR-3079; NASA: Washington, DC, USA, 1980.
- Vest, M.S. Unsteady Aerodynamics and Propulsive Characteristics of Flapping Wings with Applications to Avian Flight. Ph.D. Thesis, University of California, San Diego, CA, USA, 1996. [Google Scholar]
- Hess, J.L. Calculation of Potential Flow about Arbitrary Three-Dimensional Lifting Bodies; Technical Report No. MDC J5679-01; Douglas Aircraft Company: Long Beach, CA, USA, 1972. [Google Scholar]
- Cebeci, T.; Platzer, M.; Chen, H.; Chang, K.C.; Shao, J.P. Analysis of Low-Speed Unsteady Airfoil Flows; Springer: Berlin/Heidelberg, Germany, 2005; pp. 31–47. [Google Scholar]
- Katz, J.; Plotkin, A. Low Speed Aerodynamics; McGraw-Hill: New York, NY, USA, 1991; pp. 265–300. [Google Scholar]
- Shyy, W.; Aono, H.; Kang, C. An Introduction to Flapping Wing Aerodynamics; Cambridge University Press: Cambridge, UK, 2013; pp. 27–29. [Google Scholar]
- Patil, M.J.; Hodges, D.H. On the importance of aerodynamic and structural geometrical nonlinearities in aeroelastic behavior of high-aspect-ratio wings. J. Fluids Struct. 2004, 19, 905–915. [Google Scholar] [CrossRef]
- Wang, L.; Xie, C.; Yang, C. Static aeroelastic analysis of flexible aircraft with large deformations. In Proceedings of the 54th AIAA/ASMe/ASCe/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013. [Google Scholar]
- Crisfield, M.A. A consistent co-rotational formulation for non-linear, three-dimensional, beam-elements. Comput. Methods Appl. Mech. Eng. 1990, 81, 131–150. [Google Scholar] [CrossRef]
- Garcia, J.A. Numerical investigation of nonlinear aeroelastic effects on flexible high-aspect-ratio wings. J. Aircr. 2005, 42, 1025–1036. [Google Scholar] [CrossRef]
- Kuo-Mo, H.; Horng-Jann, H.; Yeh-Ren, C. A corotational procedure that handles large rotations of spatial beam structures. Comput. Struct. 1987, 27, 769–781. [Google Scholar] [CrossRef]
- Robertson, C.D. Structural Characterization, Optimization, and Failure Analysis of a Human-Powered Ornithopter. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- Hodges, D.H.; Dowell, E.H. Nonlinear Equations of Motion for the Elastic Bending and Torsion of Twisted Nonuniform Rotor Blades; Technical Report No. NASA TN D-7818; NASA: Washington, DC, USA, 1974.
- Teng, N.H. The Development of a Computer Code (U2DIIF) for the Numerical Solution of Unsteady, Inviscid and Incompressible Flow over an Airfoil. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 1987. [Google Scholar]
- McAlister, K.W.; Takahashi, R.K. NACA0015 Wing Pressure and Trailing Vortex Measurements; NASA Technical Paper 3151, AVSCOM Technical Report 91-A-003; NASA: Washington, DC, USA, 1991.
- Lin, S.Y.; Hu, J.J. Aerodynamic performance study of flapping-wing flow fields. In Proceedings of the 23rd AIAA Applied Aerodynamics Conference, Toronto, ON, Canada, 6–9 June 2005. [Google Scholar]
- Dowell, E.H.; Traybar, J.J. An Experimental Study of the Nonlinear Stiffness of a Rotor Blade Undergoing Flap, Lag and Twist Deformations; Technical Report No. NASA-CR-137969; NASA: Washington, DC, USA, 1975.
- Anderson, J.M.; Streitlien, K.; Barrett, D.S. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EI = Rigid | EI = EI1 | EI = EI2 | |
|---|---|---|---|
| GJ = GJ1 | Case 1 | Case 2 | Case 3 |
| GJ = GJ2 | Case 4 | Case 5 | Case 6 |
| GJ = GJ3 | Case 7 | Case 8 | Case 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, M.; Zhu, W.; Li, S. The Effect of Torsional and Bending Stiffness on the Aerodynamic Performance of Flapping Wing. Aerospace 2023, 10, 1035. https://doi.org/10.3390/aerospace10121035
Qi M, Zhu W, Li S. The Effect of Torsional and Bending Stiffness on the Aerodynamic Performance of Flapping Wing. Aerospace. 2023; 10(12):1035. https://doi.org/10.3390/aerospace10121035
Chicago/Turabian StyleQi, Ming, Wenguo Zhu, and Shu Li. 2023. "The Effect of Torsional and Bending Stiffness on the Aerodynamic Performance of Flapping Wing" Aerospace 10, no. 12: 1035. https://doi.org/10.3390/aerospace10121035
APA StyleQi, M., Zhu, W., & Li, S. (2023). The Effect of Torsional and Bending Stiffness on the Aerodynamic Performance of Flapping Wing. Aerospace, 10(12), 1035. https://doi.org/10.3390/aerospace10121035