
Dynamic Structural Scaling Concept for a Delta Wing Wind Tunnel Configuration Using Additive Manufacturing

Abstract
:1. Introduction
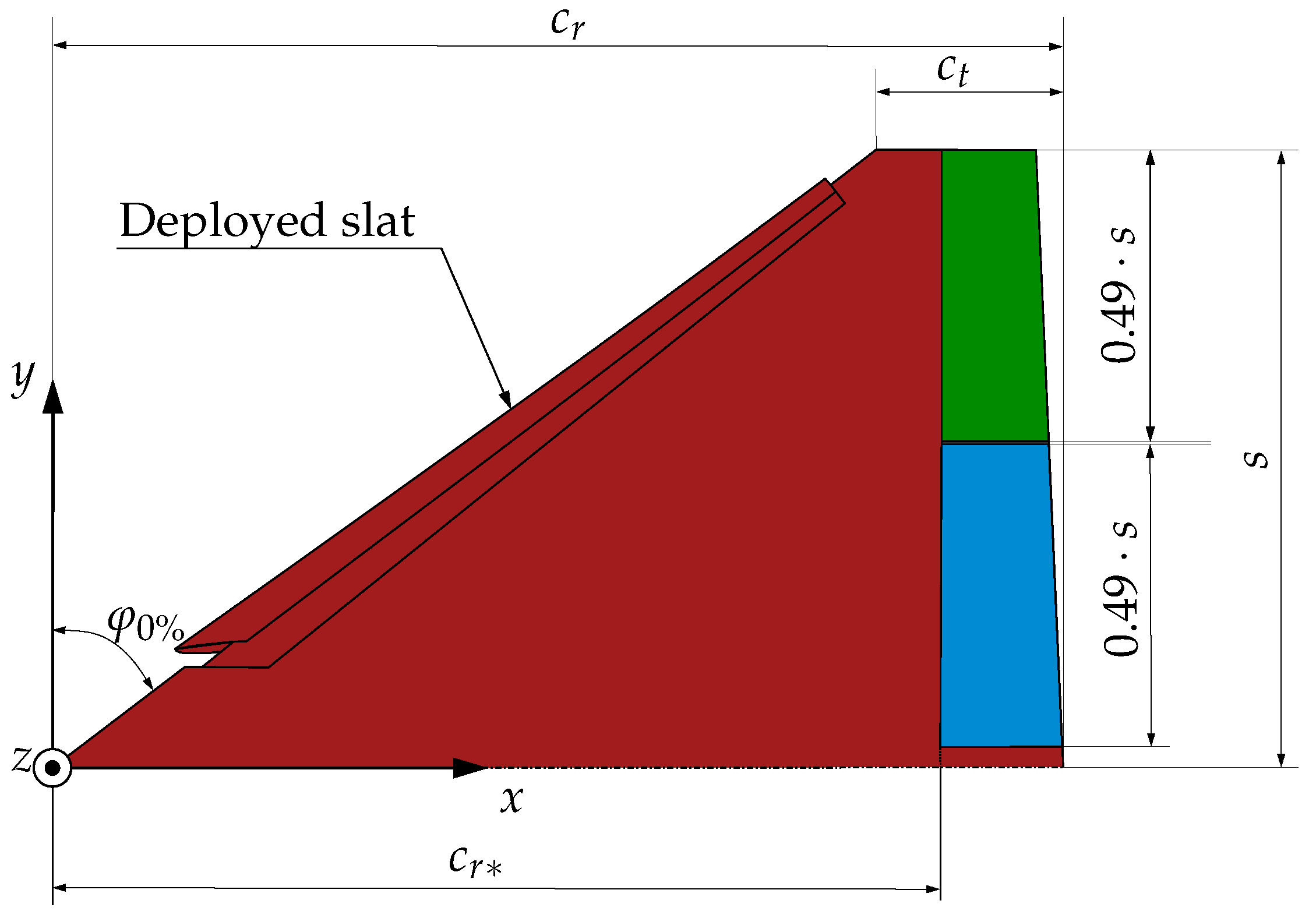
2. Reference Full-Scale Wing Model
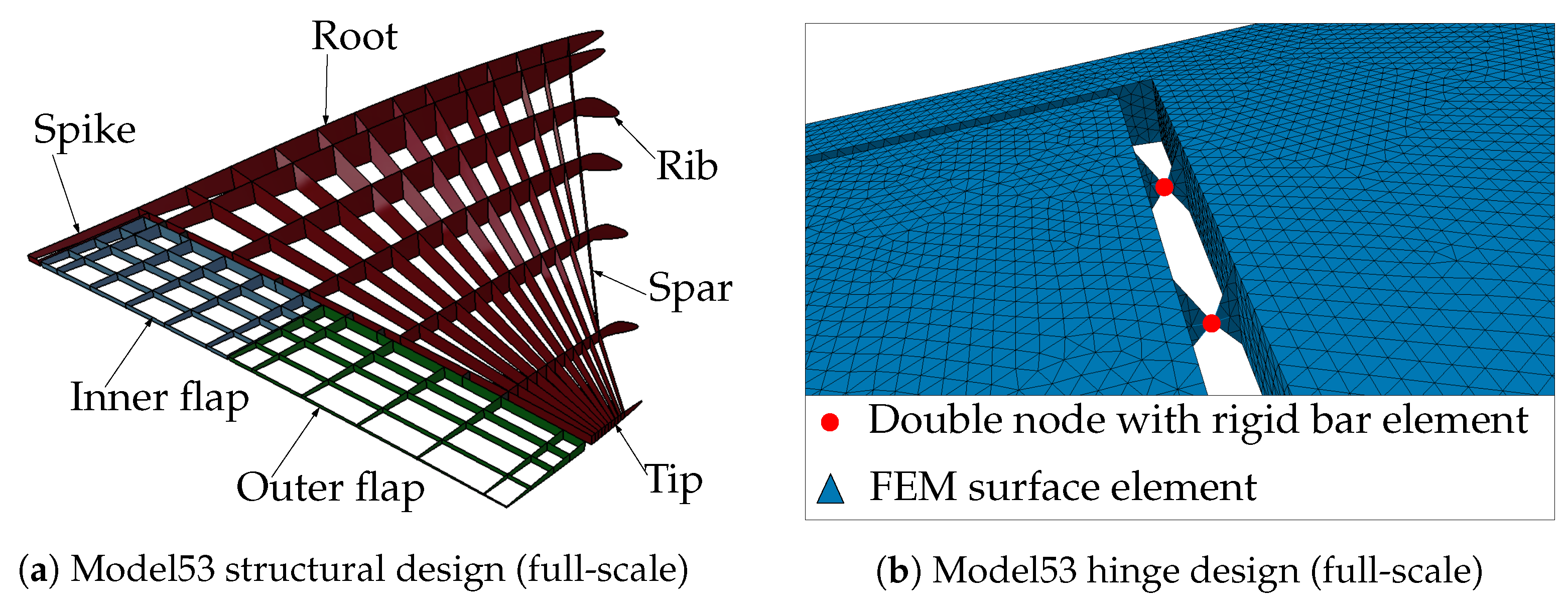
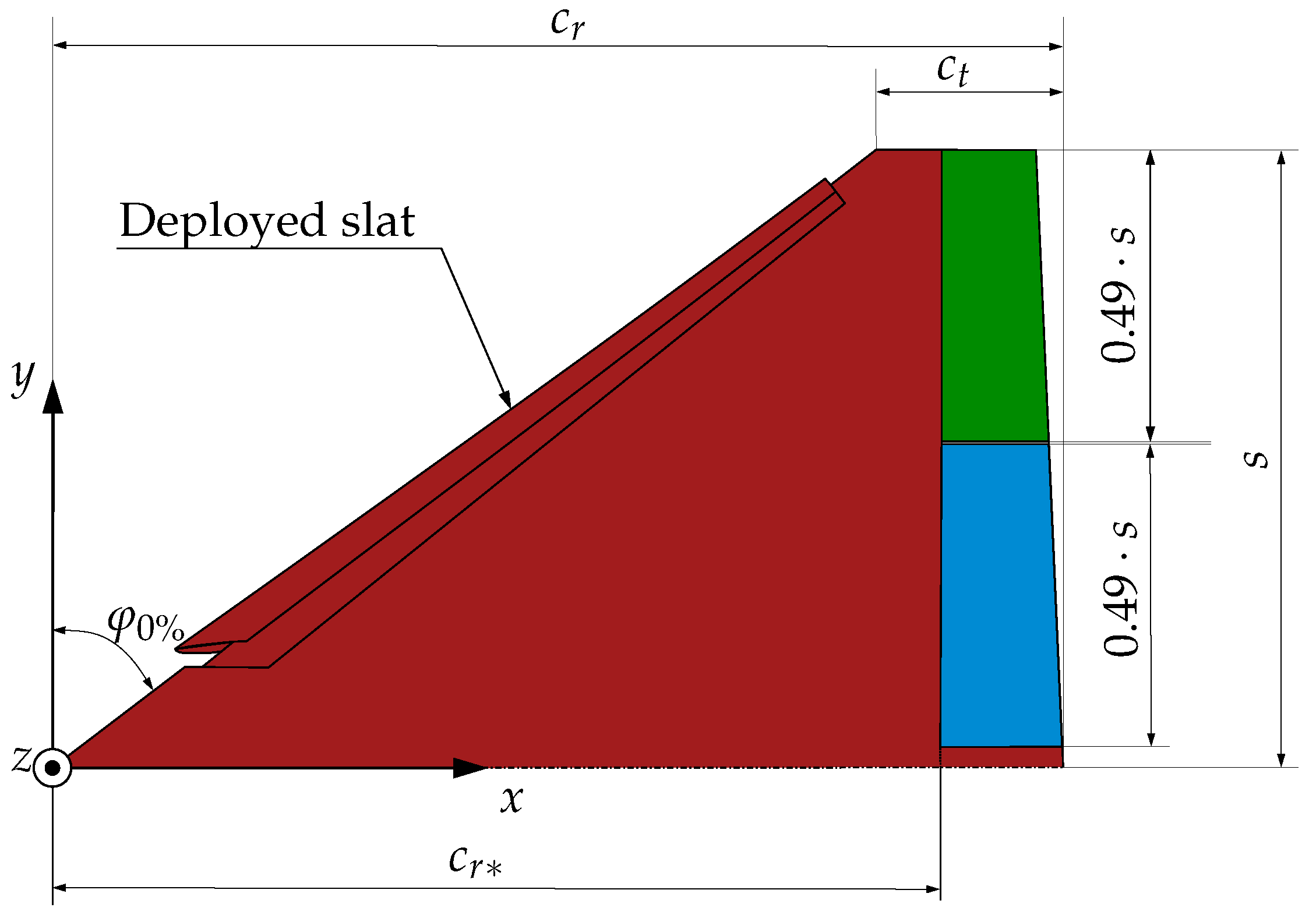
2.1. Structural Layout of the Full-Scale Wing
2.2. Flight Conditions of the Full-Scale Model
3. Wind Tunnel Model Application
3.1. Wind Tunnel Conditions for the Scaled Model
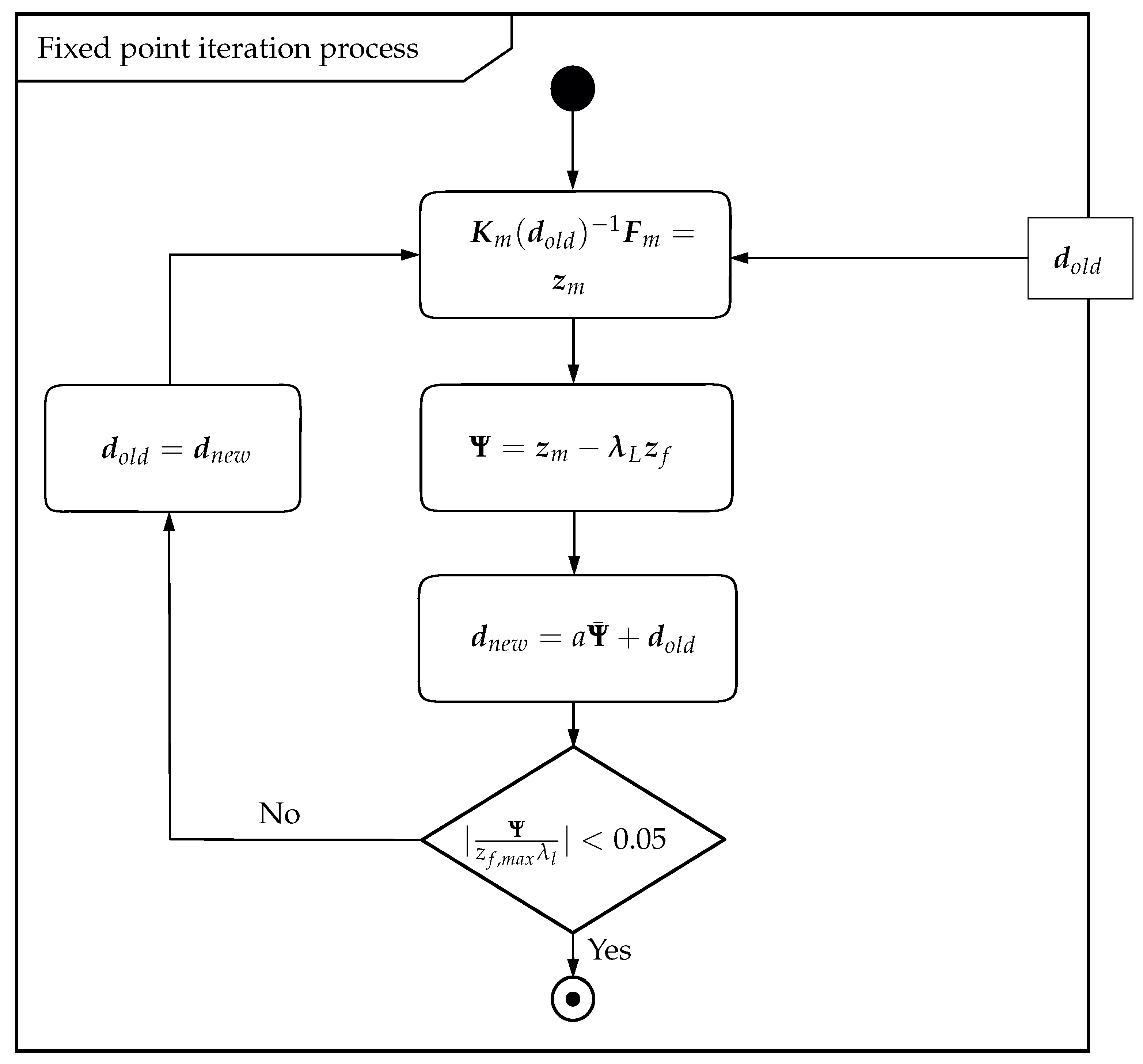
3.2. Scaling Methodology
3.2.1. Fundamental Scaling Laws
- The nondimensional modal mass matrix ;
- The nondimensional modal frequencies ;
- The nondimensional mode shapes ;
- The reduced angular frequency of the first mode ;
- The inertia ration ;
3.2.2. Stiffness Matrix Fitting
3.2.3. Mass Matrix Fitting
3.3. Structural Data Fitting for the Wing and Flaps
3.3.1. Stiffness Matrix and Deformation Matching of the Scaled Wing
3.3.2. Eigenmode and Eigenfrequency Analysis of the Scaled Wing
3.3.3. Flap Optimisation
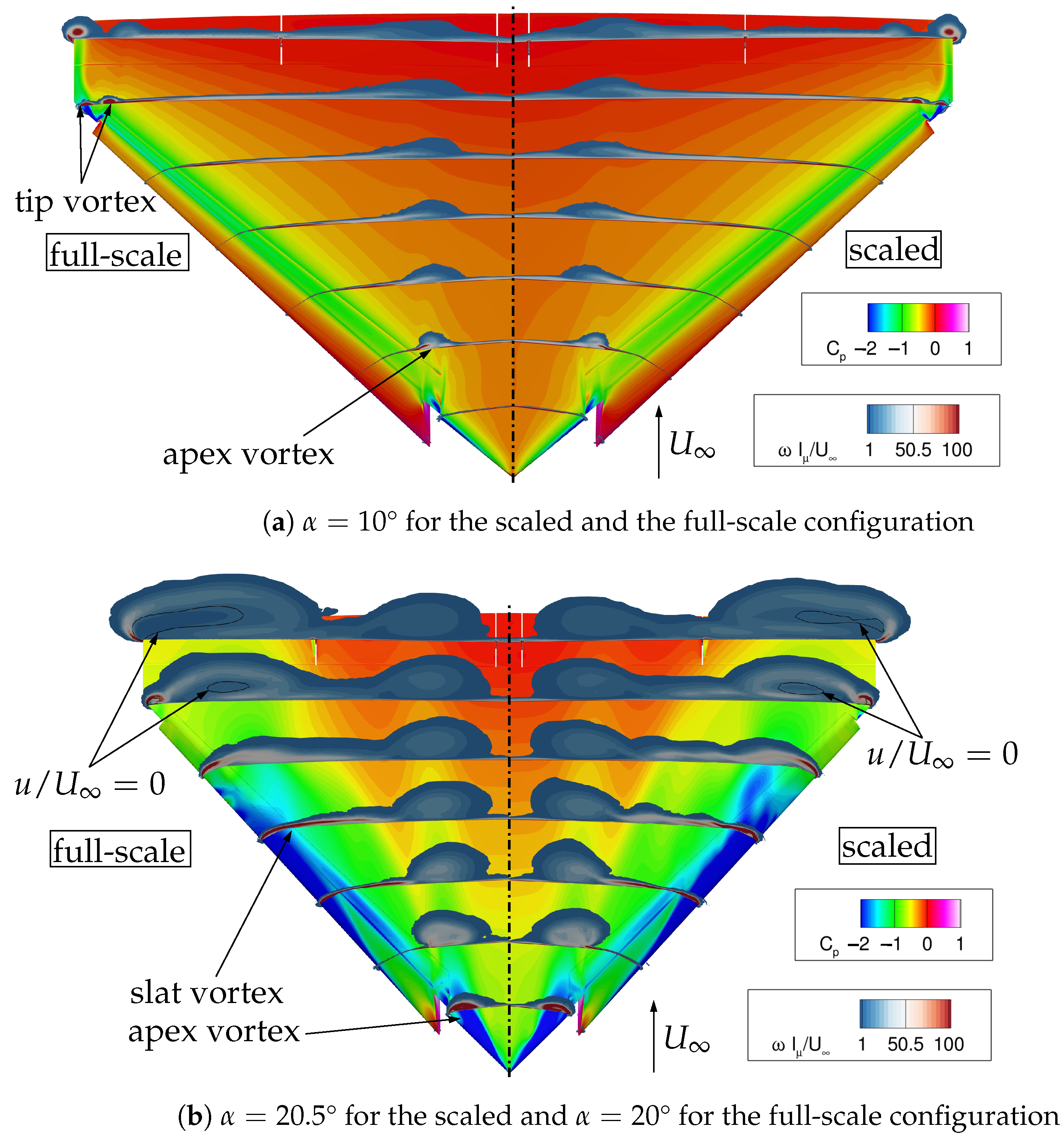
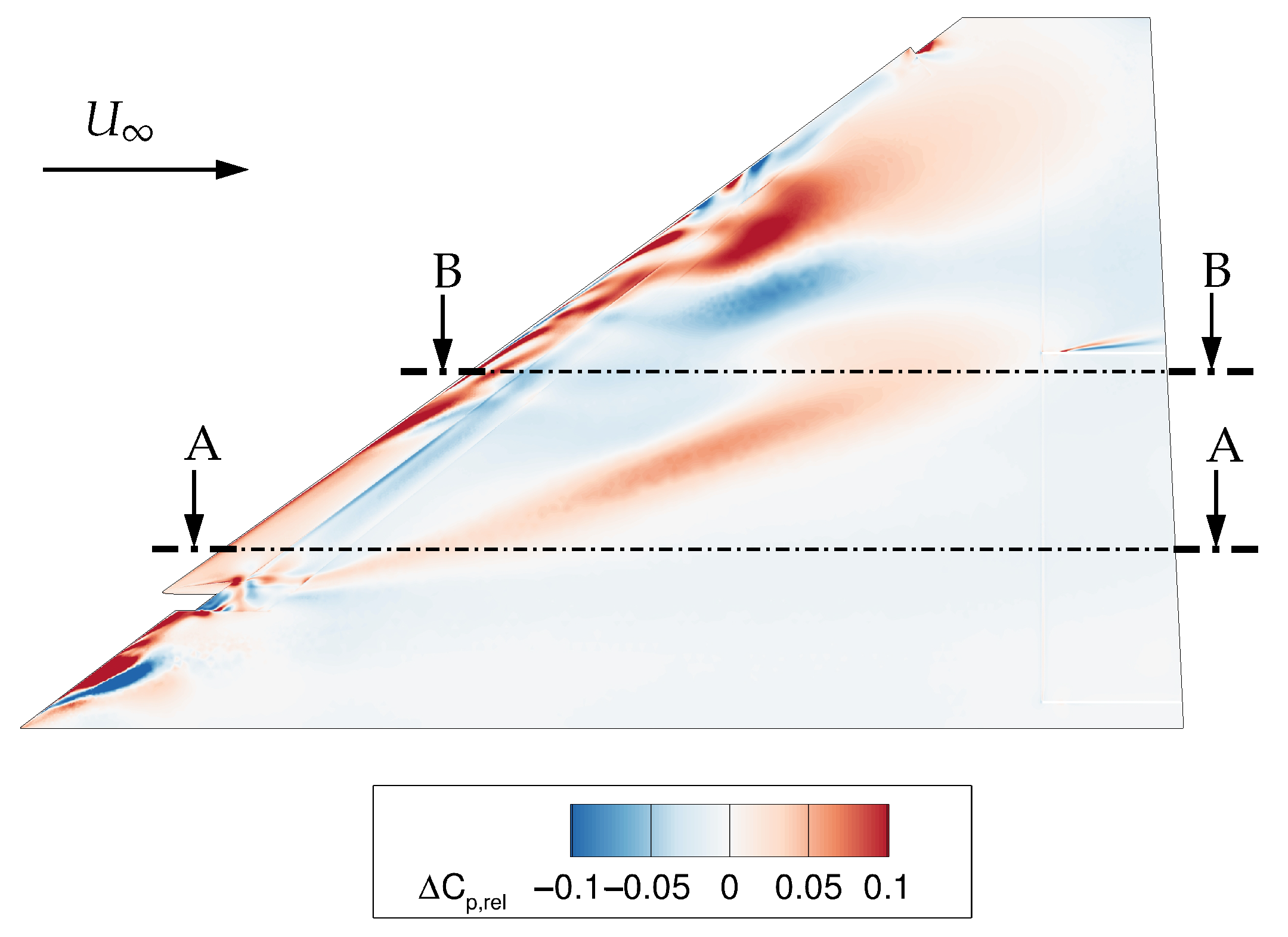
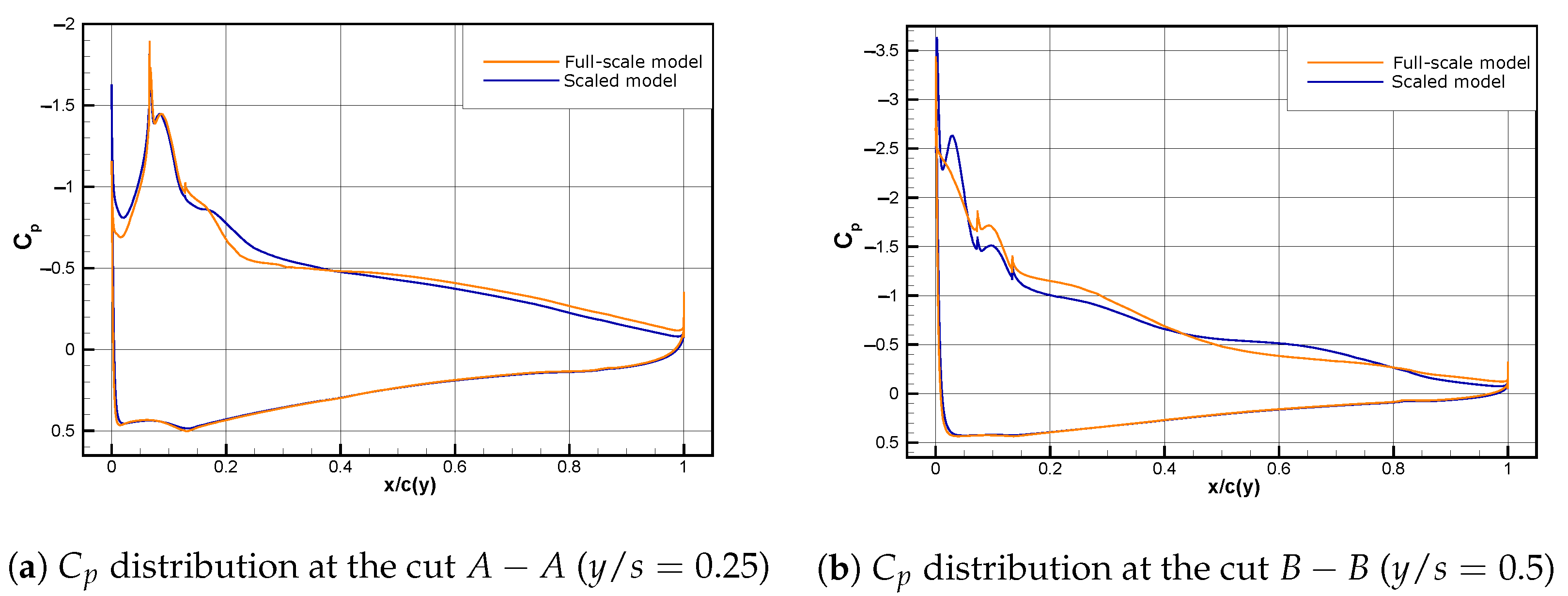
4. Aerodynamic Simulations
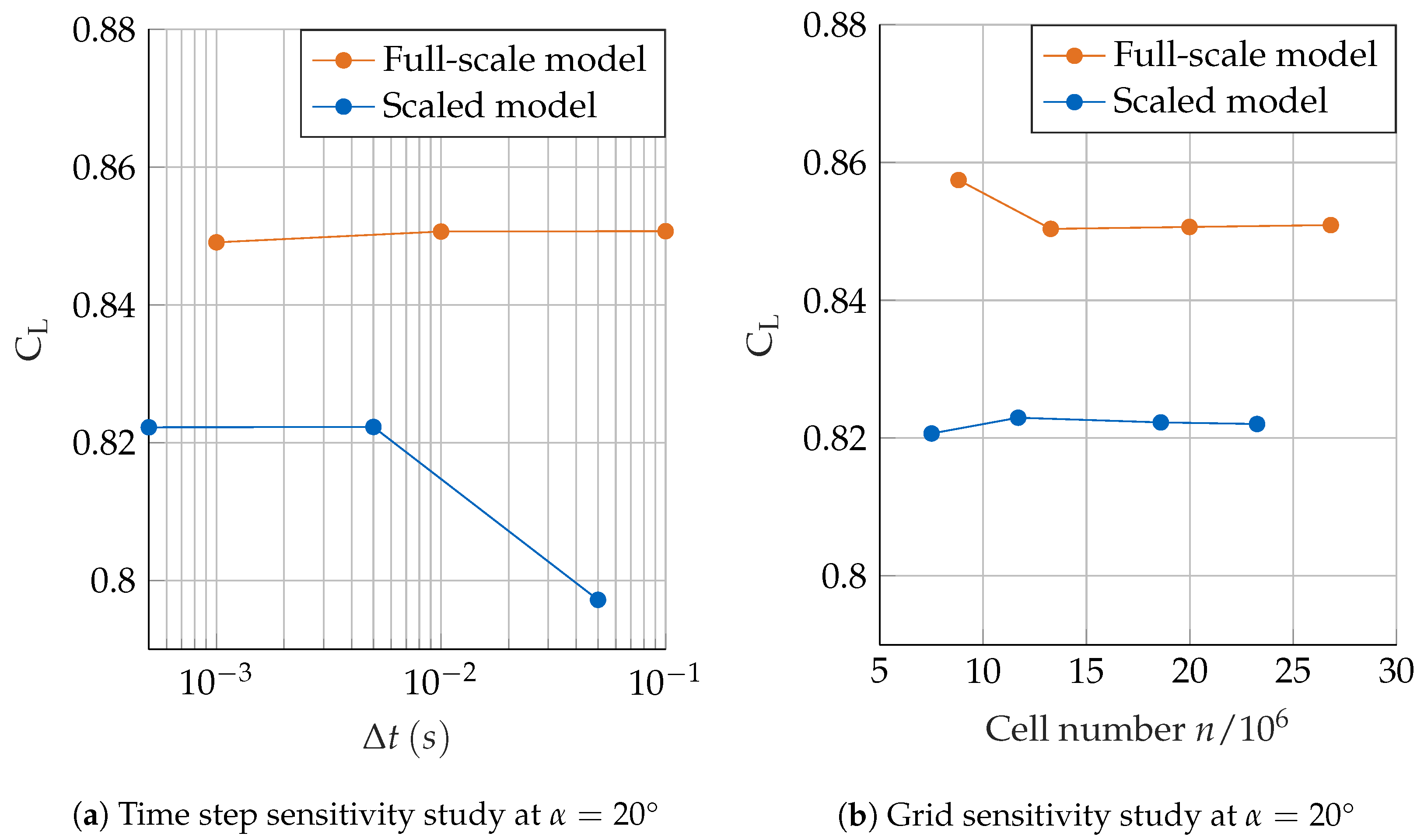
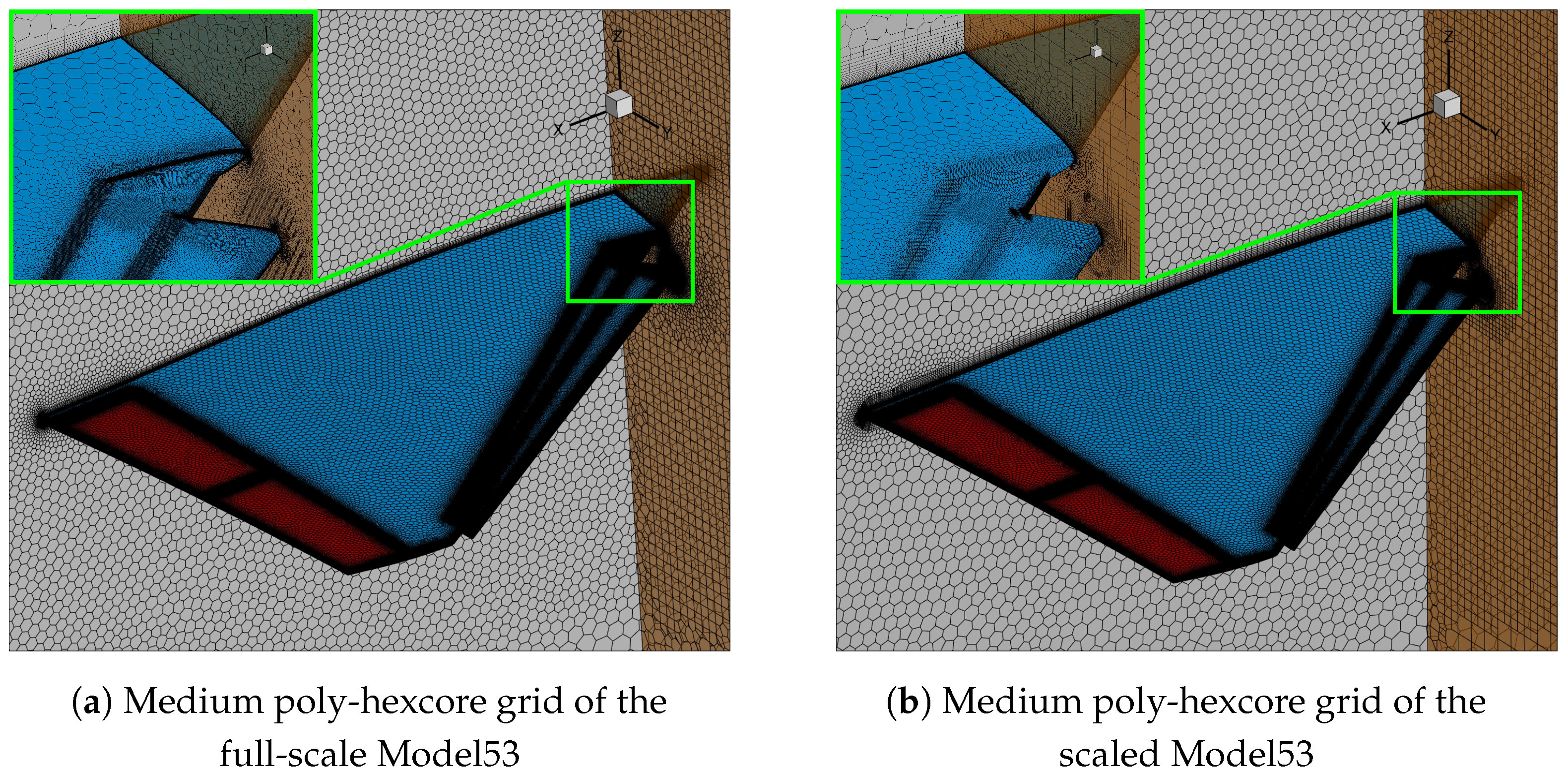
4.1. Simulation Setup
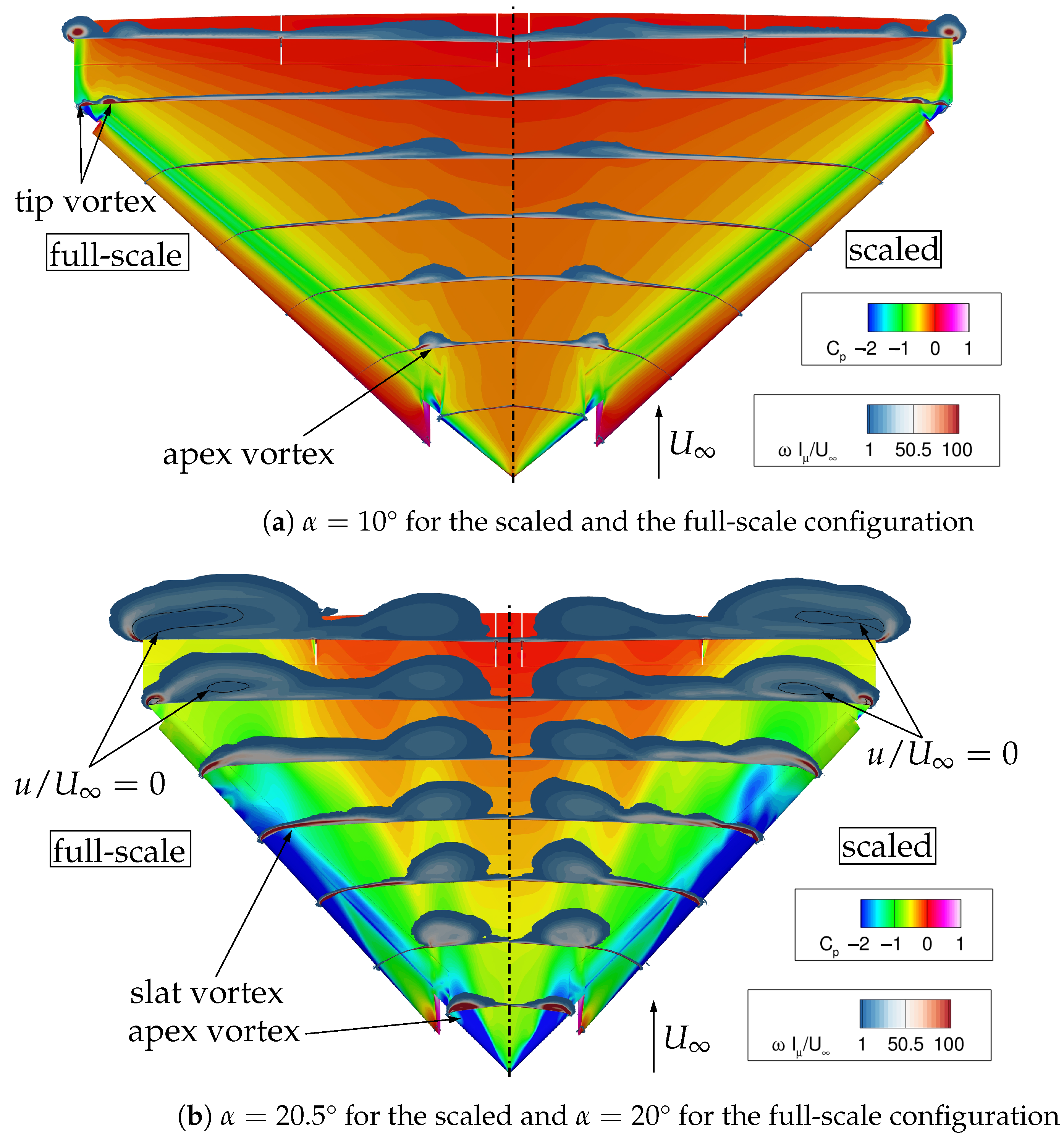
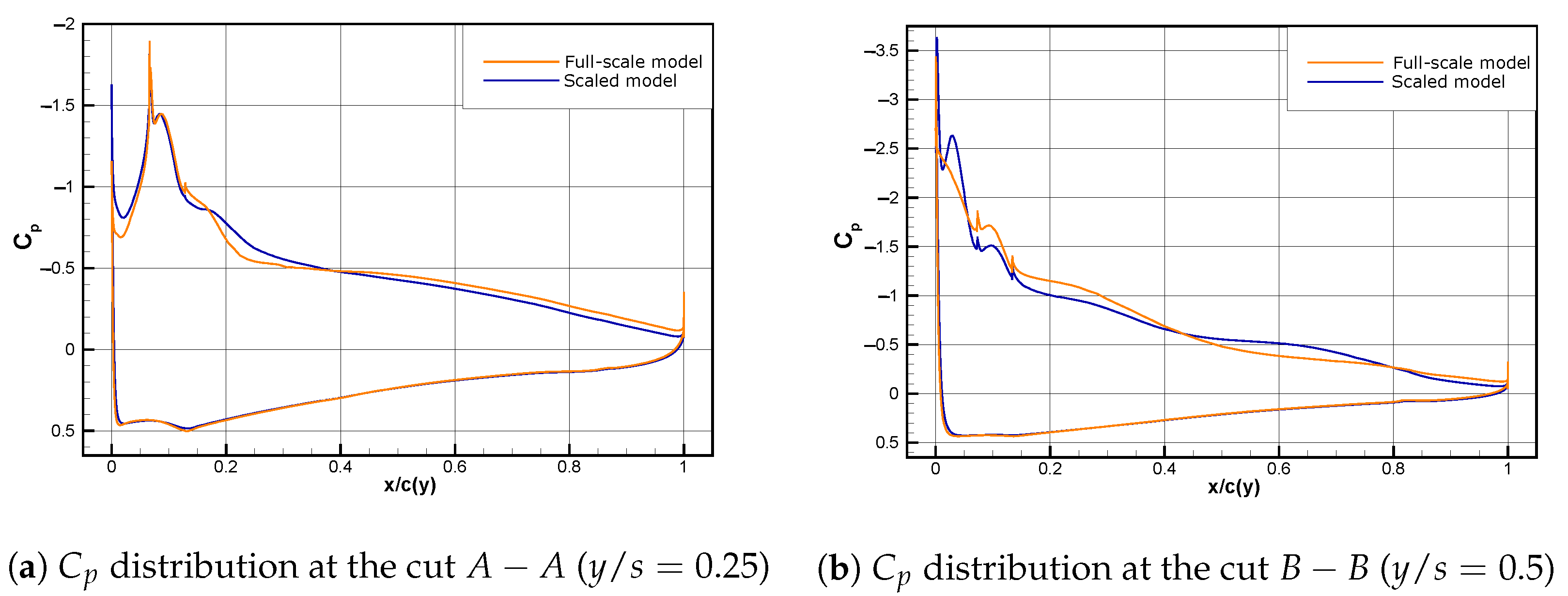
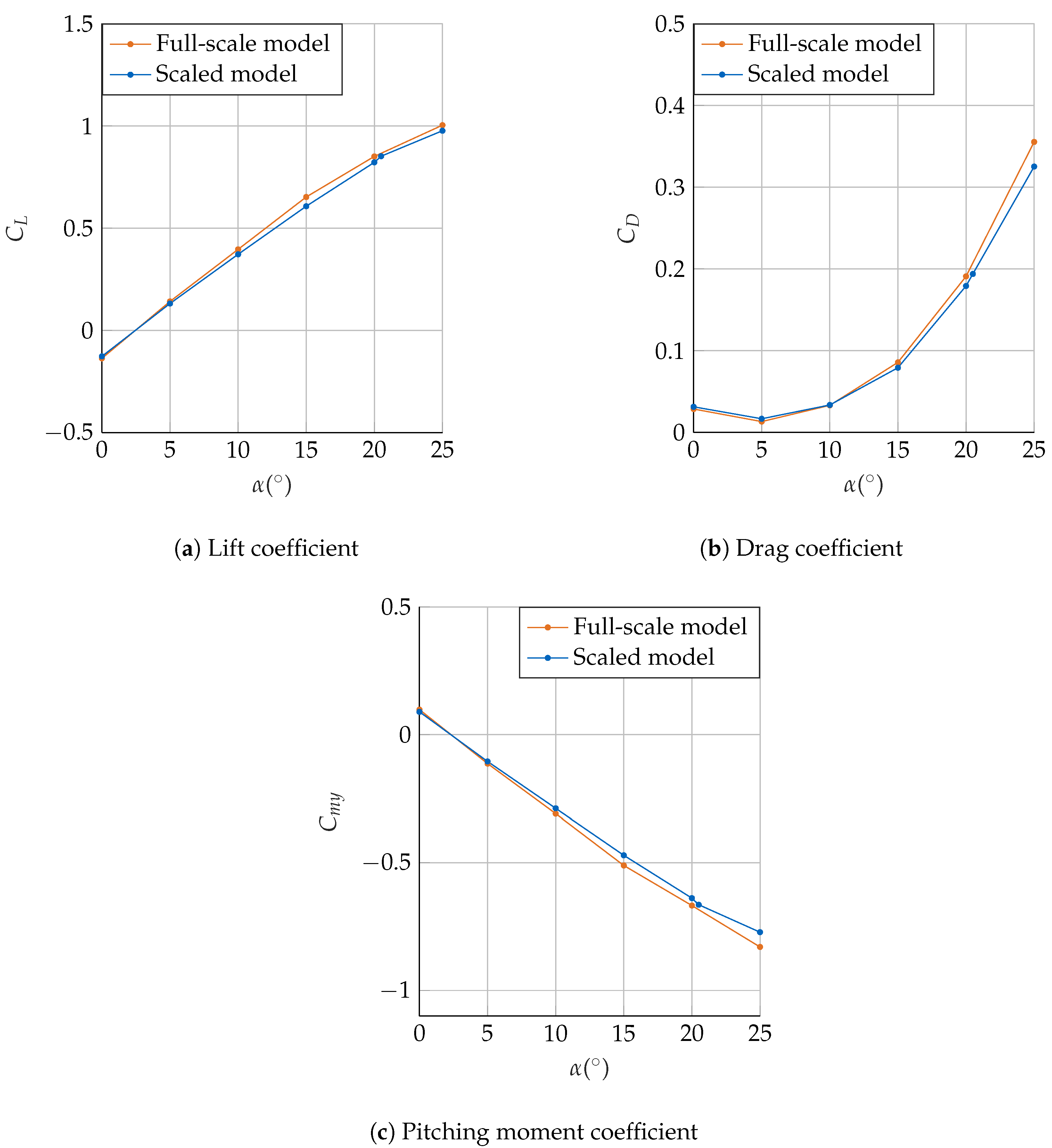
4.2. Aerodynamic Coefficients
5. Finite Element Analysis of the Model53 with Integrated Flaps
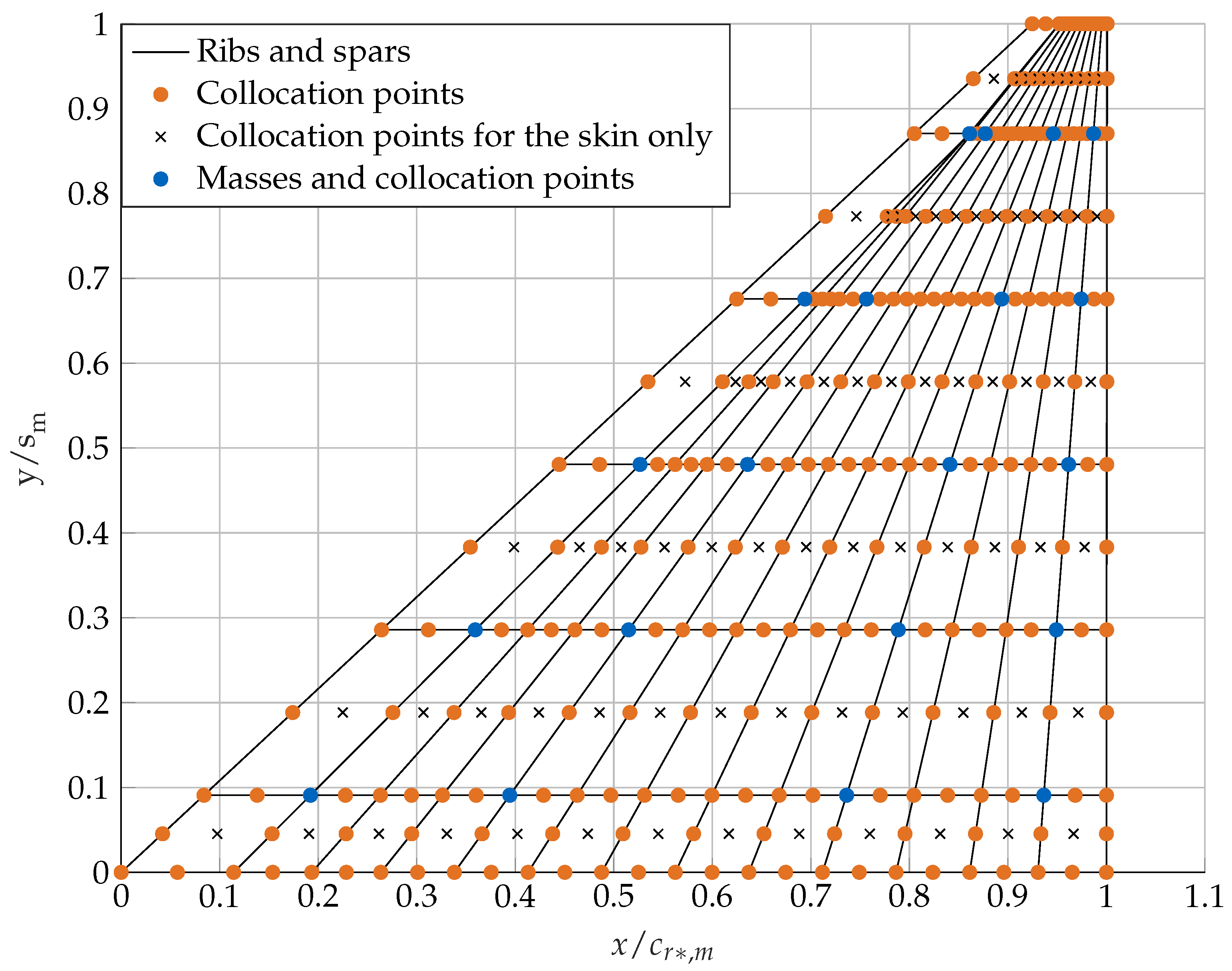
5.1. Structural Grid Resolution
5.2. Frequency Analysis
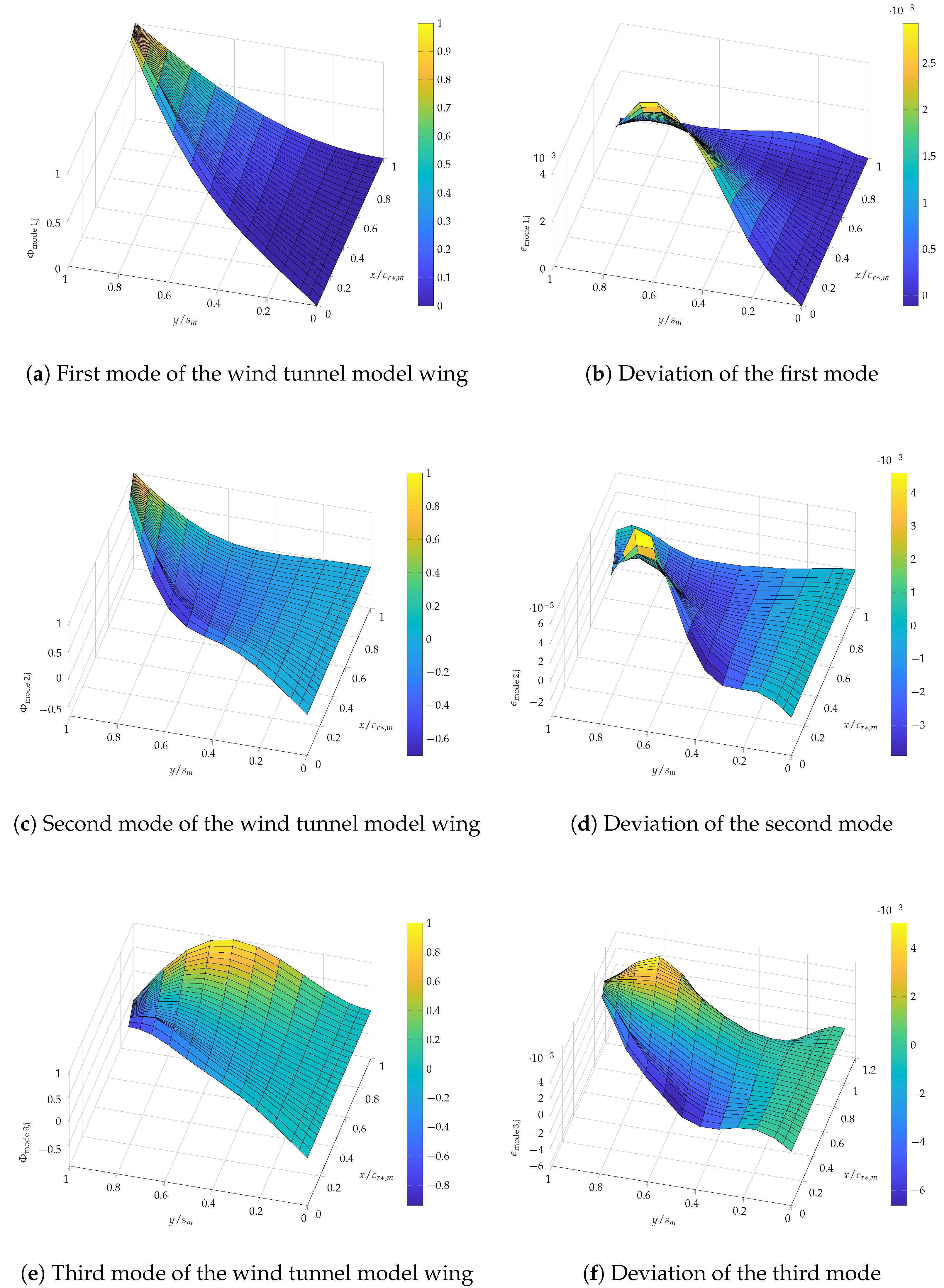
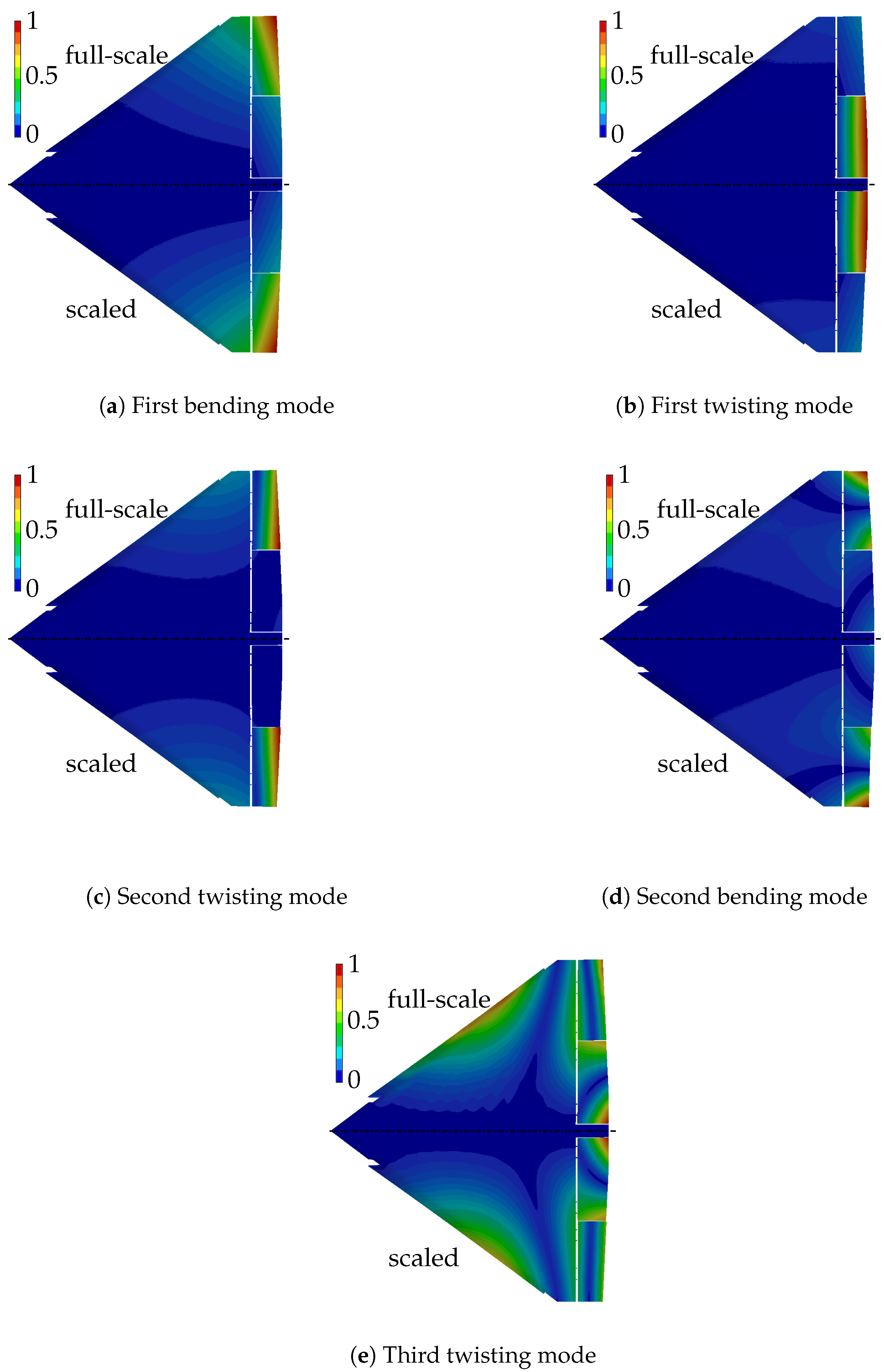
5.3. Mode Shape Analysis
5.4. Deformation Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Greek Symbols | |
| angle of attack | |
| first Rayleigh coefficient | |
| second Rayleigh coefficient | |
| relative error between the mode shape of the full-scale and the scaled wing | |
| aspect ratio | |
| eigenvalue | |
| force scaling factor | |
| geometrical scaling factor | |
| moment scaling factor | |
| taper ratio | |
| velocity scaling factor | |
| normalised modal frequency matrix | |
| modal frequency matrix | |
| inertia ratio | |
| density | |
| material density of aluminium and SLA | |
| nondimensional time | |
| rotation angle of the j-th node around length axis | |
| rotation angle of the j-th node around lateral axis | |
| sweep angle at the leading edge | |
| nondimensional deformation vector | |
| nondimensional mode shape matrix | |
| Latin Symbols | |
| relative difference between the pressure coefficient of the full-scale and | |
| the scaled model | |
| relative difference between the i-th reduced angular frequency of the | |
| full-scale and the scaled model | |
| time step size | |
| deformation in z-direction | |
| deformation in z-direction for the full-scale and the scaled model | |
| normalised modal mass matrix | |
| modal damping matrix | |
| modal stiffness matrix | |
| modal mass matrix | |
| uniformly dimensionalised damping matrix | |
| uniformly dimensionalised stiffness matrix | |
| uniformly dimensionalised mass matrix | |
| aerodynamic damping matrix | |
| aerodynamic stiffness matrix | |
| aerodynamic mass matrix | |
| damping matrix | |
| stiffness matrix | |
| mass matrix | |
| mode shape matrix of the full-scale and the scaled model | |
| transformation matrix | |
| deformation vector | |
| b | span |
| drag coefficient | |
| lift coefficient | |
| pressure coefficient | |
| root chord | |
| tip chord | |
| pitching moment coefficient | |
| pressure coefficient of the full-scale and the scaled model | |
| root chord without the spike of the full-scale and the scaled model | |
| root chord without the spike | |
| root chord of the full-scale and the scaled model | |
| tip chord of the full-scale and the scaled model | |
| Young’s modulus for aluminium and SLA-printed material | |
| F | force |
| f | eigenfrequency |
| i-th eigenfrequencies of the full-scale and scaled model | |
| Froude number | |
| Froude number for the full-scale and the scaled wing | |
| g | gravitational constant |
| h | flight altitude |
| i-th reduced angular frequency | |
| i-th reduced angular frequency of the full-scale and the scaled model | |
| mean aerodynamic chord | |
| mean aerodynamic chord of the full-scale and the scaled model | |
| M | Mach number |
| m | moment |
| n | total number of degrees of freedom |
| q | dynamic pressure |
| dynamic pressure of the full-scale and the scaled model | |
| Reynolds number | |
| Reynolds number of the full-scale and the scaled model | |
| s | half span |
| half span of the full-scale and the scaled wing | |
| wing reference area of the full-scale and the scaled model | |
| wing reference area | |
| T | temperature |
| rib thickness of the full-scale model | |
| skin thickness of the full-scale model at the root | |
| skin thickness of the full-scale model at the tip | |
| spar thickness of the full-scale model at the trailing edge | |
| spar thickness of the full-scale model | |
| rib thickness of the scaled model | |
| skin thickness of the scaled model at the root | |
| skin thickness of the scaled model at the tip | |
| spar thickness of the scaled model at the trailing edge | |
| spar thickness of the scaled model | |
| inflow velocity of the full-scale and the scaled model | |
| inflow velocity | |
| x | x-coordinate of the aerodynamic frame of reference |
| y | y-coordinate of the aerodynamic frame of reference |
| z | z-coordinate of the aerodynamic frame of reference |
Appendix A. Scaling Methodology
References
- Breitsamter, C. Turbulente Strömungsstrukturen an Flugzeugkonfigurationen mit Vorderkantenwirbeln; Aerodynamik, Utz, Herbert: Munich, Germany, 1997. [Google Scholar]
- Dietrich, H.; Günter, R. Experimentelle Bestimmung der gebundenen Wirbellinien sowie des Strömungsverlaufs in der Umgebung der Hinterkante eines schlanken Deltaflügels; Friedr. Vieweg & Sohn: Braunschweig, Germany, 1971. [Google Scholar]
- Gursul, I.; Xie, W. Interaction of Vortex Breakdown with an Oscillating Fin. AIAA J. 2001, 39, 438–446. [Google Scholar] [CrossRef]
- Mabey, D. Some aspects of aircraft dynamic loads due to flow separation. Prog. Aerosp. Sci. 1989, 26, 115–151. [Google Scholar] [CrossRef]
- Cella, U.; Vecchia, P.D.; Groth, C.; Porziani, S.; Chiappa, A.; Giorgetti, F.; Nicolosi, F.; Biancolini, M.E. Wind Tunnel Model Design and Aeroelastic Measurements of the RIBES Wing. J. Aerosp. Eng. 2021, 34, 04020109. [Google Scholar] [CrossRef]
- Rigby, R.N.; Cornette, E.S. Wind-Tunnel Investigation of Tail Buffet at Subsonic and Transonic Speeds Employing a Dynamic Elastic Aircraft Model. In Report NASA Technical Note D-1362; National Aeronautics and Space Administration: Washington, DC, USA, 1962. [Google Scholar]
- Stenfelt, G.; Ringertz, U. Design and construction of aeroelastic wind tunnel models. Aeronaut. J. 2015, 119, 1585–1599. [Google Scholar] [CrossRef]
- Gibson, F.W.; Igoe, W.B. Measurements of the buffeting loads on the wing and horizontal tail of a 1/4-scale model of the X-1E airplane. In Report NASA Research Memorandum L57E15; National Aeronautics and Space Administration: Washington, DC, USA, 1957. [Google Scholar]
- Tsushima, N.; Nakakita, K.; Saitoh, K. Structural and aeroelastic studies of wing model for transonic wind tunnel test fabricated by additive manufacturing with AlSi10Mg alloys. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; America Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar]
- Katzenmeier, L.; Vidy, C.; Kolb, A.; Breitsamter, C. Aeroelastic wind tunnel model for tail buffeting analysis using rapid prototyping technologies. CEAS Aeronaut. J. 2021, 12, 633–651. [Google Scholar] [CrossRef]
- Moioli, M.; Reinbold, C.; Sørensen, K.; Breitsamter, C. Investigation of Additively Manufactured Wind Tunnel Models with Integrated Pressure Taps for Vortex Flow Analysis. Aerospace 2019, 6, 113. [Google Scholar] [CrossRef] [Green Version]
- Dilger, R.; Hickethier, H.; Greenhalgh, M.D. Eurofighter a safe life aircraft in the age of damage tolerance. Int. J. Fatigue 2009, 31, 1017–1023. [Google Scholar] [CrossRef]
- Aluminium/Aluminum 7178 Alloy (UNS A97178)—azom.com. Available online: https://www.azom.com/article.aspx?ArticleID=6645 (accessed on 15 February 2023).
- Reinbold, C.; Sørensen, K.; Breitsamter, C. Aeroelastic simulations of a delta wing with a Chimera approach for deflected control surfaces. CEAS Aeronaut. J. 2021, 13, 237–250. [Google Scholar] [CrossRef]
- Jebakumar, S.K.; Kumar, N.; Pashilkar, A. Flight Envelope Protection for a Fighter Aircraft. In Proceedings of the 2019 Sixth Indian Control Conference (ICC), Hyderabad, India, 18–20 December 2019; pp. 13–18. [Google Scholar] [CrossRef]
- Liefer, R.K.; Valasek, J.; Eggold, D.P.; Downing, D.R. Fighter agility metrics, research and test. J. Aircr. 1992, 29, 452–457. [Google Scholar] [CrossRef]
- Validierung von Isotropie beim SLA 3D-Druck—formlabs.com. Available online: https://formlabs.com/de/blog/validierung-von-isotropie-beim-sla-3d-druck (accessed on 15 February 2023).
- Accura Xtreme White 200 (SLA) | 3D Systems—3dsystems.com. Available online: https://www.3dsystems.com/materials/accura-xtreme-white-200 (accessed on 15 February 2023).
- Mathworks. MathWorks—Entwickler von MATLAB und Simulink—de.mathworks.com. Available online: https://de.mathworks.com/ (accessed on 15 February 2023).
- Neto, M.A.; Amaro, A.; Roseiro, L.; Cirne, J.; Leal, R. Engineering Computation of Structures: The Finite Element Method, 1st ed.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Ferreira, A.J.M. MATLAB Codes for Finite Element Analysis—Solids and Structures; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Steinke, P. Finite-Elemente-Methode—Rechnergestützte Einführung; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2007. [Google Scholar]
- Ricciardi, A.P.; Canfield, R.A.; Patil, M.J.; Lindsley, N. Nonlinear aeroelastic scaling of a joined-wing aircraft. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012. [Google Scholar] [CrossRef]
- Wan, Z.; Cesnik, C.E.S. Geometrically Nonlinear Aeroelastic Scaling for Very Flexible Aircraft. AIAA J. 2014, 52, 2251–2260. [Google Scholar] [CrossRef] [Green Version]
- Afonso, F.; Coelho, M.; Vale, J.; Lau, F.; Suleman, A. On the design of aeroelastically scaled models of high aspect-ratio wings. Aerospace 2020, 7, 166. [Google Scholar] [CrossRef]
- Wind Tunnel A—epc.ed.tum.de. Available online: https://www.epc.ed.tum.de/en/aer/wind-tunnels/wind-tunnel-a (accessed on 15 February 2023).
- Stickan, B.; Dillinger, J.; Schewe, G. Computational aeroelastic investigation of a transonic limit-cycle-oscillation experiment at a transport aircraft wing model. J. Fluids Struct. 2014, 49, 223–241. [Google Scholar] [CrossRef]
- Keye, S.; Brodersen, O.; Rivers, M.B. Investigation of aeroelastic effects on the NASA common research model. J. Aircr. 2014, 51, 1323–1330. [Google Scholar] [CrossRef]
- Pires, T. Linear Aeroelastic Scaling of a Joined Wing Aircraft; Instituto Superior Tecnico: Lisbon, Portugal, 2014. [Google Scholar]
- Zohuri, B. Dimensional Analysis Beyond the Pi Theorem; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Patrick, G.; Henriette, B.; Philippe, B. UML 2.0 in Action a Project-Based Tutorial, 1st ed.; From technologies to solutions; Packt Pub.: Birmingham, UK, 2005. [Google Scholar]
- Ansys Fluent | Fluid Simulation Software—ansys.com. Available online: https://www.ansys.com/products/fluids/ansys-fluent (accessed on 24 February 2023).
- ANSYS. Ansys Fluent User’s Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2023. [Google Scholar]
- ANSYS. Ansys Fluent Theory Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2021. [Google Scholar]
- Ansys Fluent Mosaic Meshing | CFD Mesh—ansys.com. Available online: https://www.ansys.com/products/fluids/ansys-fluent/mosaic-meshing#tab1-1 (accessed on 31 May 2023).
- Ricciardi, A.P.; Eger, C.A.; Canfield, R.A.; Patil, M.J. Nonlinear aeroelastic scaled model optimization using equivalent static loads. In Proceedings of the 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013. [Google Scholar] [CrossRef]
- Wright, J.; Cooper, J. Introduction to Aircraft Aeroelasticity and Loads; John Wiley & Sons Ltd.: Chichester, UK, 2015. [Google Scholar]
- Colomer, J.M.; Bartoli, N.; Lefebvre, T.; Martins, J.R.R.A.; Morlier, J. Aeroelastic scaling of flying demonstrator: Flutter matching. Mech. Ind. 2021, 22, 42. [Google Scholar] [CrossRef]
- Ricciardi, A.P.; Canfield, R.A.; Patil, M.J.; Lindsley, N. Nonlinear aeroelastic scaled-model design. J. Aircr. 2016, 53, 20–32. [Google Scholar] [CrossRef]
- Kielb, J.J.; Abhari, R.S. Experimental Study of Aerodynamic and Structural Damping in a Full-Scale Rotating Turbine. J. Eng. Gas Turbines Power 2002, 125, 102–112. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full-Scale Model | Scaled Model | |
|---|---|---|
| Half span s | ||
| Root chord | ||
| Root chord without spike | ||
| Tip chord | ||
| Mean aerodynamic chord | ||
| Wing reference area | ||
| 53° | ||
| Component | (m) | (m) | (m) | (m) | (m) |
|---|---|---|---|---|---|
| Wing | |||||
| Inner Flap | |||||
| Outer Flap |
| Full-Scale Model | Wind Tunnel Model | ||||||
|---|---|---|---|---|---|---|---|
() | () | () | () | ||||
| Component | (Pa) | (m) | (m) | (m) | (m) | (m) |
|---|---|---|---|---|---|---|
| Wing | ||||||
| Inner flap | ||||||
| Outer flap |
| Mode | Full-Scale Wing | Wind Tunnel Model Wing | |||
|---|---|---|---|---|---|
| (Hz) | (Hz) | ||||
| 1 | |||||
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
| Mode | Inner Flap Full-Scale | Inner Flap Wind Tunnel Model | |||
|---|---|---|---|---|---|
| (Hz) | (Hz) | ||||
| 1 | |||||
| 2 | |||||
| 3 | |||||
| Mode | Outer Flap Full-Scale | Outer Flap Wind Tunnel Model | |||
|---|---|---|---|---|---|
| (Hz) | (Hz) | ||||
| 1 | |||||
| 2 | |||||
| 3 | |||||
| Mode | Full-Scale Configuration | Wind Tunnel Model | |||
|---|---|---|---|---|---|
| (Hz) | (Hz) | ||||
| 1 | |||||
| 2 | |||||
| 3 | |||||
| 4 | |||||
| 5 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bantscheff, K.; Breitsamter, C. Dynamic Structural Scaling Concept for a Delta Wing Wind Tunnel Configuration Using Additive Manufacturing. Aerospace 2023, 10, 581. https://doi.org/10.3390/aerospace10070581
Bantscheff K, Breitsamter C. Dynamic Structural Scaling Concept for a Delta Wing Wind Tunnel Configuration Using Additive Manufacturing. Aerospace. 2023; 10(7):581. https://doi.org/10.3390/aerospace10070581
Chicago/Turabian StyleBantscheff, Konstantin, and Christian Breitsamter. 2023. "Dynamic Structural Scaling Concept for a Delta Wing Wind Tunnel Configuration Using Additive Manufacturing" Aerospace 10, no. 7: 581. https://doi.org/10.3390/aerospace10070581
APA StyleBantscheff, K., & Breitsamter, C. (2023). Dynamic Structural Scaling Concept for a Delta Wing Wind Tunnel Configuration Using Additive Manufacturing. Aerospace, 10(7), 581. https://doi.org/10.3390/aerospace10070581