
Aeroacoustic and Aerodynamic Adjoint-Based Shape Optimization of an Axisymmetric Aero-Engine Intake
 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Hybrid Noise Prediction Tool
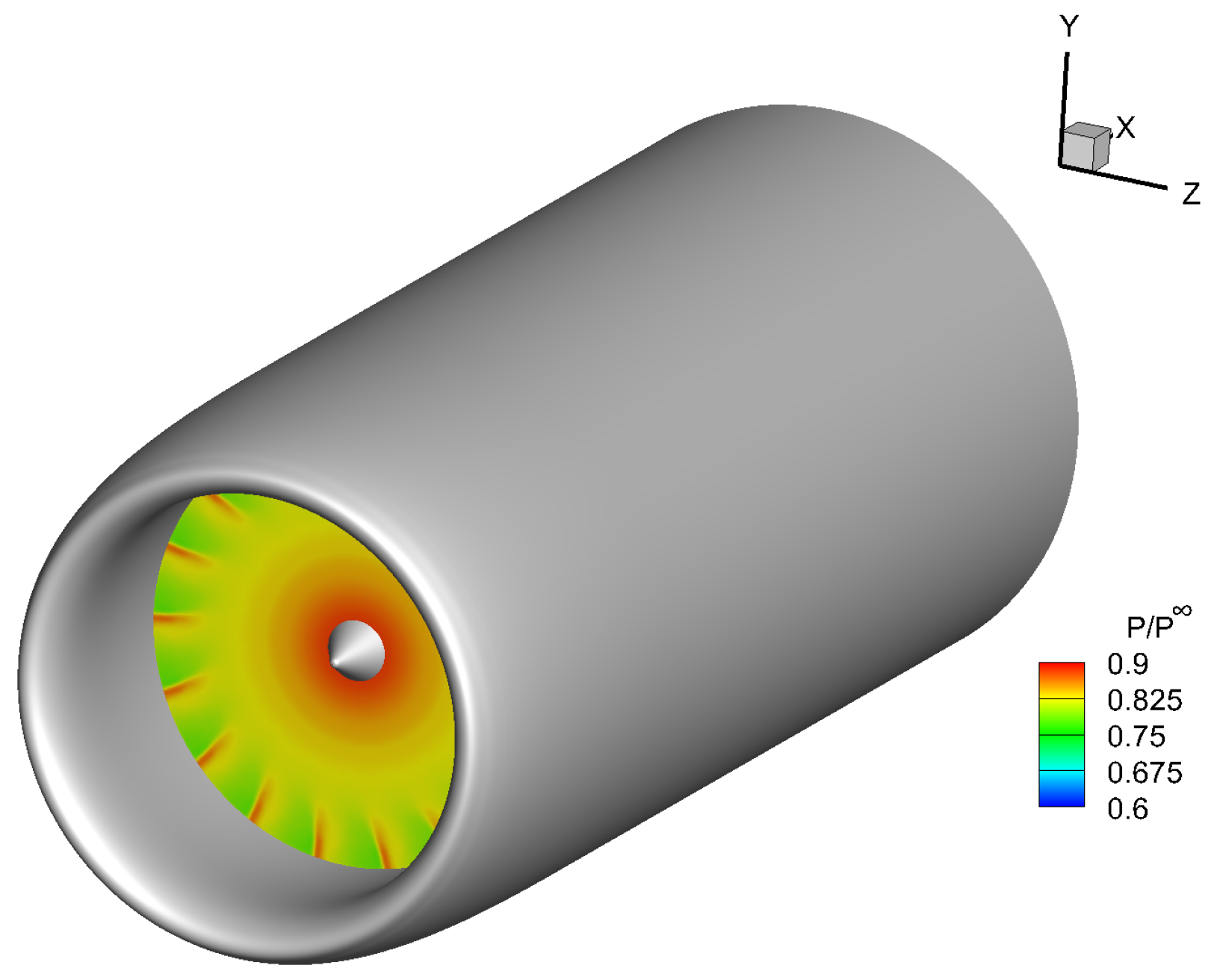
2.1. Flow Simulation
2.2. Noise Propagation to Far Field
3. Development of the Continuous Adjoint Method
4. The Axisymmetric Aero-Engine Analysis and Optimization
4.1. Verification of the Hybrid CFD/CAA Method
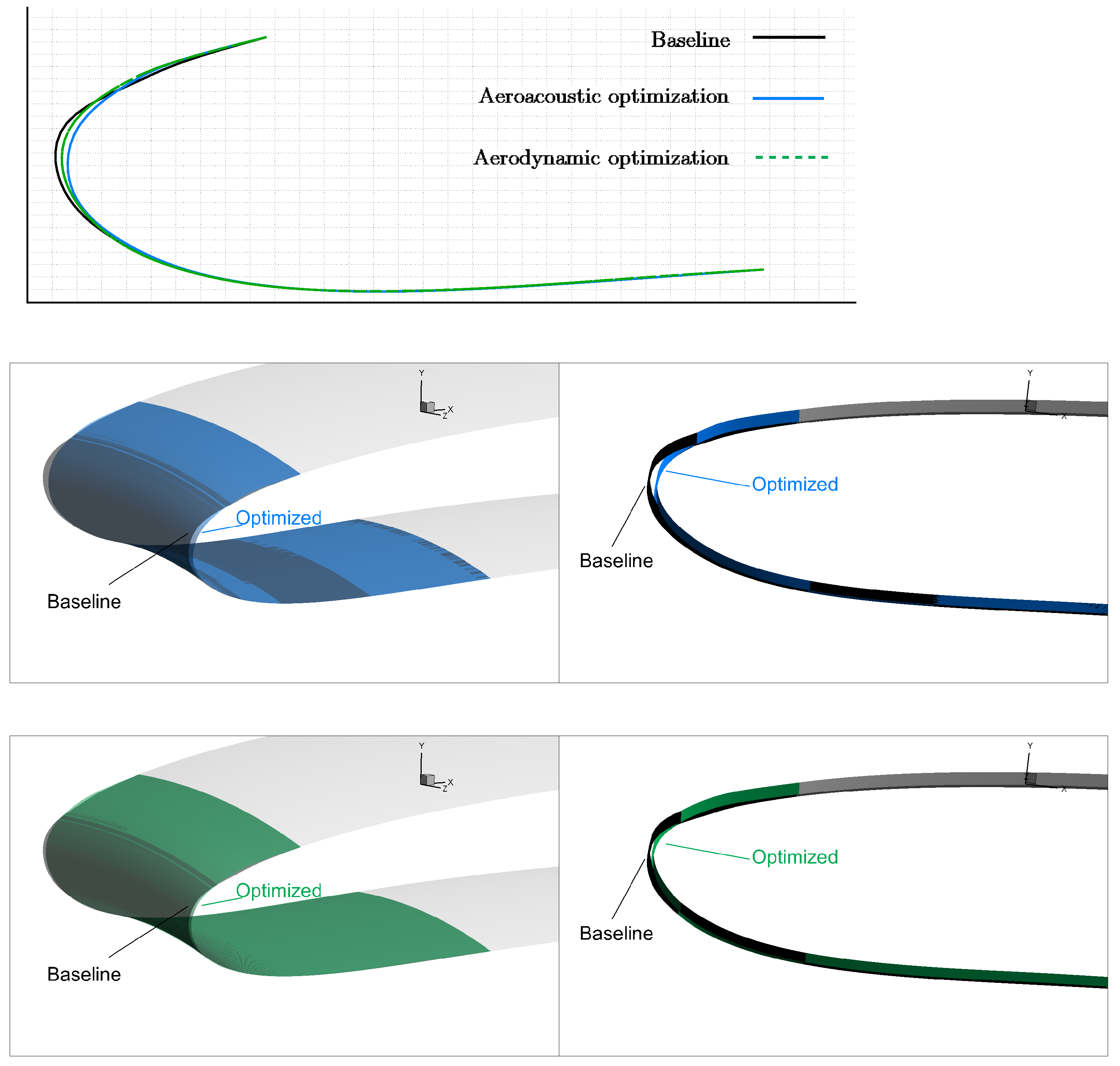
4.2. Aeroacoustic and Aerodynamic Optimizations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Thoma, E.; Grönstedt, T.; Zhao, X. Quantifying the environmental design trades for a state-of-the-art turbofan engine. Aerospace 2020, 7, 148. [Google Scholar] [CrossRef]
- Hansell, A.; Blangiardo, M.; Fortunato, L.; Floud, S.; de Hoogh, K.; Fecht, D.; Ghosh, R.; Laszlo, H.; Pearson, C.; Beale, L.; et al. Aircraft noise and cardiovascular disease near Heathrow airport in London: Small area study. BMJ 2013, 347. [Google Scholar] [CrossRef] [PubMed]
- Kallas, S.; Geoghegan-Quinn, M.; Darecki, M.; Edelstenne, C.; Enders, T.; Fernandez, E.; Hartman, P. Flightpath 2050 Europe’s vision for aviation. In Report of the High Level Group on Aviation Research, European Commission, Report No. EUR; European Commission: Brussels, Belgium, 2011; p. 98. [Google Scholar]
- Spalart, P.; Shur, M.; Strelets, M.; Travin, A. Initial noise predictions for rudimentary landing gear. J. Sound Vib. 2011, 330, 4180–4195. [Google Scholar] [CrossRef]
- Jawahar, H.; Ali, S.; Azarpeyvand, M.; da Silva, C. Aerodynamic and aeroacoustic performance of high-lift airfoil fitted with slat cove fillers. J. Sound Vib. 2020, 479, 115347. [Google Scholar] [CrossRef]
- Valldosera Martinez, R.; Afonso, F.; Lau, F. Aerodynamic shape optimisation of a camber morphing airfoil and noise estimation. Aerospace 2022, 9, 43. [Google Scholar] [CrossRef]
- Jameson, A. Aerodynamic design via control theory. J. Sci. Comput. 1988, 3, 233–260. [Google Scholar] [CrossRef]
- Wang, Q.; Moin, P.; Iaccarino, G. Minimal repetition dynamic checkpointing algorithm for unsteady adjoint calculation. Siam J. Sci. Comput. 2009, 31, 2549–2567. [Google Scholar] [CrossRef]
- Margetis, A.S.; Papoutsis-Kiachagias, E.; Giannakoglou, K. Lossy compression techniques supporting unsteady adjoint on 2D/3D unstructured grids. Comput. Methods Appl. Mech. Eng. 2021, 387, 114152. [Google Scholar] [CrossRef]
- Giles, M.B.; Pierce, N.A. An introduction to the adjoint approach to design. Flow Turbul. Combust. 2000, 65, 393–415. [Google Scholar] [CrossRef]
- Papadimitriou, D.; Giannakoglou, K. A continuous adjoint method with objective function derivatives based on boundary integrals for inviscid and viscous flows. Comput. Fluids 2007, 36, 325–341. [Google Scholar] [CrossRef]
- Papoutsis-Kiachagias, E.; Asouti, V.; Giannakoglou, K.; Gkagkas, K.; Shimokawa, S.; Itakura, E. Multi-Point aerodynamic shape optimization of cars based on continuous adjoint. Struct. Multidiscip. Optim. 2019, 59, 675–694. [Google Scholar] [CrossRef]
- Elham, A.; van Tooren, M.J. Discrete adjoint aerodynamic shape optimization using symbolic analysis with OpenFEMflow. Struct. Multidiscip. Optim. 2021, 63, 2531–2551. [Google Scholar] [CrossRef]
- Lozano, C.; Ponsin, J. Shock equations and jump conditions for the 2D adjoint Euler equations. Aerospace 2023, 10, 267. [Google Scholar] [CrossRef]
- Rumpfkeil, M.; Zingg, D. A hybrid algorithm for far-field noise minimization. Comput. Fluids 2010, 39, 1516–1528. [Google Scholar] [CrossRef]
- Zhou, B.; Albring, T.; Gauger, N.; Economon, T.; Palacios, F.; Alonso, J. A discrete adjoint framework for unsteady aerodynamic and aeroacoustic optimization. In Proceedings of the 16th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Dallas, TX, USA, 22–26 June 2015. AIAA 2015-3355. [Google Scholar]
- Zhou, B.; Albring, T.; Gauger, N.; Ilario, C.; Economon, T.; Alonso, J. A discrete adjoint approach for jet-flap interaction noise reduction. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017. AIAA 2017-0130. [Google Scholar]
- Fabiano, E.; Mavriplis, D. Adjoint-based aeroacoustic design-optimization of flexible rotors in forward flight. J. Am. Helicopter Soc. 2017, 62, 1–17. [Google Scholar] [CrossRef]
- Içke, R.; Baysal, O.; Lopes, L.; Zhou, B.; Diskin, B.; Moy, A. Toward adjoint-based aeroacoustic optimization for propeller and rotorcraft applications. In Proceedings of the AIAA Aviation 2020 Forum, Online, 15–19 June 2020. AIAA 2020-3140. [Google Scholar]
- Spagnoli, B.; Airiau, C. Adjoint analysis for noise control in a two-dimensional compressible mixing layer. Comput. Fluids 2008, 37, 475–486. [Google Scholar] [CrossRef]
- Freund, J. Adjoint-based optimization for understanding and suppressing jet noise. J. Sound Vib. 2011, 330, 4114–4122. [Google Scholar] [CrossRef]
- Kapellos, S.; Papoutsis-Kiachagias, E.; Giannakoglou, K.; Hartmann, M. The unsteady continuous adjoint method for minimizing flow-induced sound radiation. J. Comput. Phys. 2019, 392, 368–384. [Google Scholar] [CrossRef]
- Monfaredi, M.; Trompoukis, X.S.; Tsiakas, K.T.; Giannakoglou, K.C. An unsteady aerodynamic/aeroacoustic optimization framework using continuous adjoint. In Advances in Evolutionary and Deterministic Methods for Design, Optimization and Control in Engineering and Sciences; Springer: Berlin/Heidelberg, Germany, 2021; pp. 147–162. [Google Scholar]
- Monfaredi, M.; Trompoukis, X.; Tsiakas, K.; Giannakoglou, K. Unsteady continuous adjoint to URANS coupled with FW–H analogy for aeroacoustic shape optimization. Comput. Fluids 2021, 230, 105136. [Google Scholar] [CrossRef]
- Pan, F.; Coupland, J. An integrated optimization system for low noise nacelle design. In Proceedings of the 11th AIAA/CEAS Aeroacoustics Conference, Monterey, CA, USA, 23–25 May 2005; p. 2945. [Google Scholar]
- Cao, Y.; Stanescu, D. Shape optimization for noise radiation problems. Comput. Math. Appl. 2002, 44, 1527–1537. [Google Scholar] [CrossRef]
- Stanescu, D.; Mathelin, L.; Hussaini, Y. Optimal acoustic design of fan inlets for tone noise radiation. In Proceedings of the 9th AIAA/CEAS Aeroacoustics Conference and Exhibit, Hilton Head, SC, USA, 12–14 May 2003; p. 3269. [Google Scholar]
- Qiu, S.; Ying, J. A combined shape and liner optimization of a general aeroengine intake for tone noise reduction. Procedia Eng. 2015, 99, 5–20. [Google Scholar] [CrossRef]
- Qiu, S. A continuous adjoint-based aeroacoustic shape optimization for multi-mode duct acoustics. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2018, 232, 3897–3914. [Google Scholar] [CrossRef]
- Monfaredi, M.; Asouti, V.; Trompoukis, X.S.; Tsiakas, K.T.; Giannakoglou, K.C. Continuous adjoint-based aeroacoustic shape optimization of an aero-engine intake. In Proceedings of the 14th EUROGEN Conference, Athens, Greece, 28–30 June 2021. [Google Scholar]
- Luidens, R.W.; Stockman, N.O.; Diedrich, J.H. An Approach to Optimum Subsonic Inlet Design; ASME: New York, NY, USA, 1979; Volume 79672. [Google Scholar]
- Kazula, S.; Wöllner, M.; Höschler, K. Identification of efficient geometries for variable pitot inlets for supersonic transport. Aircr. Eng. Aerosp. Technol. 2020, 92, 981–992. [Google Scholar] [CrossRef]
- Vyas, U.; Braun, J.; Andreoli, V.; Paniagua, G. Short engine intakes: Design and trade-off aerodynamic recommendations. Aerosp. Sci. Technol. 2023, 134, 108164. [Google Scholar] [CrossRef]
- da Rocha-Schmidt, L.; Hermanutz, A.; Baier, H.; Seitz, A.; Bijewitz, J.; Isikveren, A.; Scarpa, F.; Allegri, G.; Remillat, C.; Feuilloley, E.; et al. Progress towards adaptive aircraft engine nacelles. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences, St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Williams, J.; Hawkings, D. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. London. Ser. Math. Phys. Sci. 1969, 264, 321–342. [Google Scholar]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. Rech. Aerosp. 1994, 1, 5–21. [Google Scholar]
- Asouti, V.; Trompoukis, X.; Kampolis, I.; Giannakoglou, K. Unsteady CFD computations using vertex-centered finite volumes for unstructured grids on Graphics Processing Units. Int. J. Numer. Methods Fluids 2011, 67, 232–246. [Google Scholar] [CrossRef]
- Lockard, D. An efficient, two-dimensional implementation of the Ffowcs Williams and Hawkings equation. J. Sound Vib. 2000, 229, 897–911. [Google Scholar] [CrossRef]
- Papoutsis-Kiachagias, E.; Giannakoglou, K. Continuous adjoint methods for turbulent flows, applied to shape and topology optimization: Industrial applications. Arch. Comput. Methods Eng. 2016, 23, 255–299. [Google Scholar] [CrossRef]
- Trompoukis, X.; Tsiakas, K.; Asouti, V.; Kontou, M.; Giannakoglou, K. Optimization of an internally cooled turbine blade—mathematical development and application. Int. J. Turbomach. Propuls. Power 2021, 6, 20. [Google Scholar] [CrossRef]
- Tsiakas, K. Development of Shape Parameterization Techniques, a Flow Solver and Its Adjoint, for Optimization on GPUs. Turbomachinery and External Aerodynamics Applications. Ph.D. Thesis, NTUA, Athens, Greece, 2019. [Google Scholar]
- Luke, E.; Collins, E.; Blades, E. A fast mesh deformation method using explicit interpolation. J. Comput. Phys. 2012, 231, 586–601. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monfaredi, M.; Asouti, V.; Trompoukis, X.; Tsiakas, K.; Giannakoglou, K. Aeroacoustic and Aerodynamic Adjoint-Based Shape Optimization of an Axisymmetric Aero-Engine Intake. Aerospace 2023, 10, 743. https://doi.org/10.3390/aerospace10090743
Monfaredi M, Asouti V, Trompoukis X, Tsiakas K, Giannakoglou K. Aeroacoustic and Aerodynamic Adjoint-Based Shape Optimization of an Axisymmetric Aero-Engine Intake. Aerospace. 2023; 10(9):743. https://doi.org/10.3390/aerospace10090743
Chicago/Turabian StyleMonfaredi, Morteza, Varvara Asouti, Xenofon Trompoukis, Konstantinos Tsiakas, and Kyriakos Giannakoglou. 2023. "Aeroacoustic and Aerodynamic Adjoint-Based Shape Optimization of an Axisymmetric Aero-Engine Intake" Aerospace 10, no. 9: 743. https://doi.org/10.3390/aerospace10090743