
Discretization Method to Improve the Efficiency of Complex Airspace Operation


Abstract
:1. Introduction
2. Problem Analysis and Methods
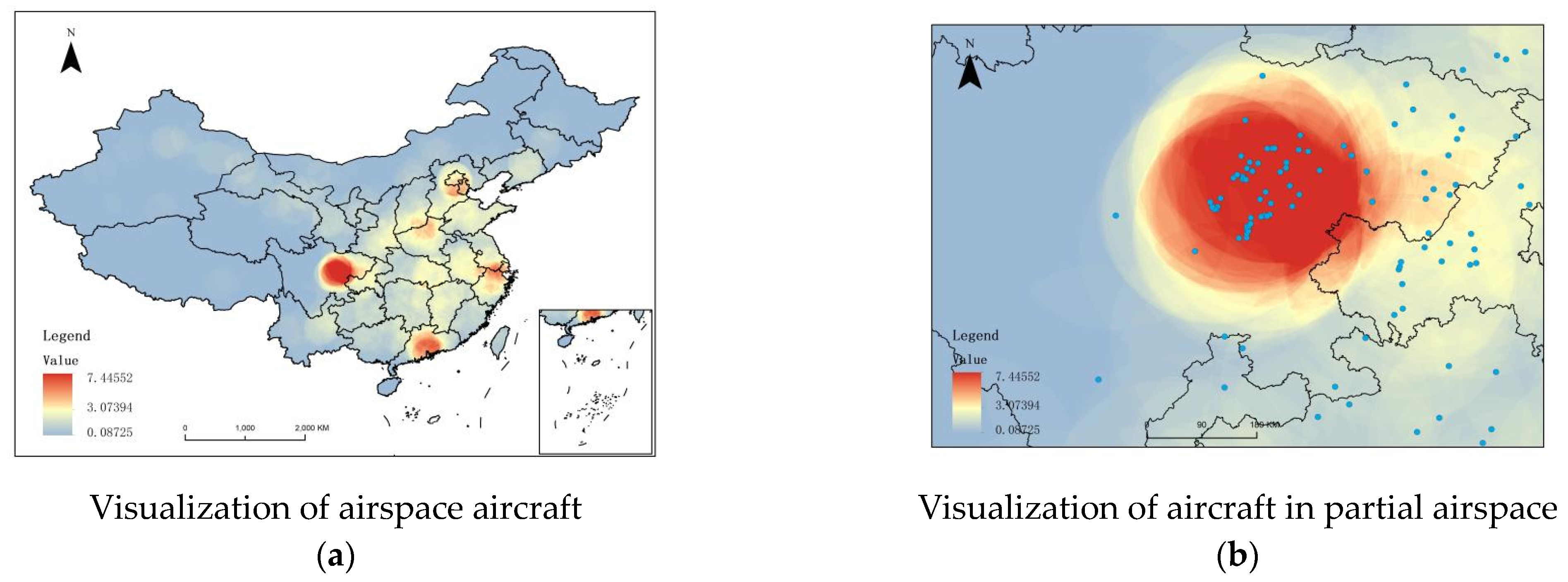
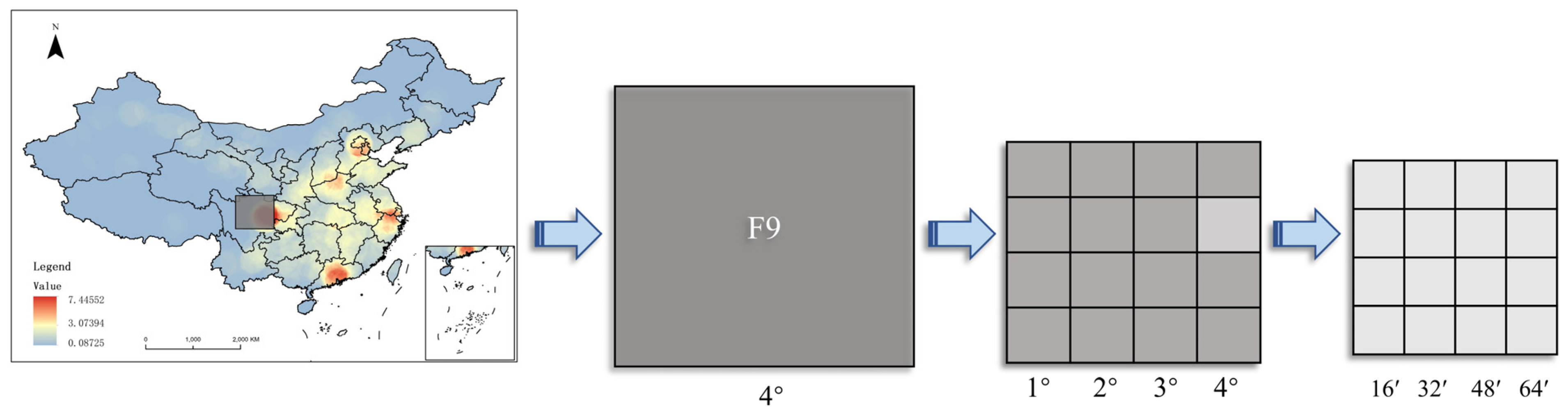
- The visualization analysis of airspace is represented by a digital model that provides a numerical representation of the entire operation of the airspace, enabling researchers and controllers to clearly observe airspace use.
- The measurable processing of airspace employs spatiotemporal big data technology to re-evaluate airspace use and calculate airspace traffic, thereby providing assistance for further enhancing airspace use efficiency.
- Calculable decision-making in the airspace by establishing a digital model of the airspace and controlling its operation based on the results of model calculations.
2.1. Visualization Analysis of Airspace
2.2. Measurable Processing of Airspace
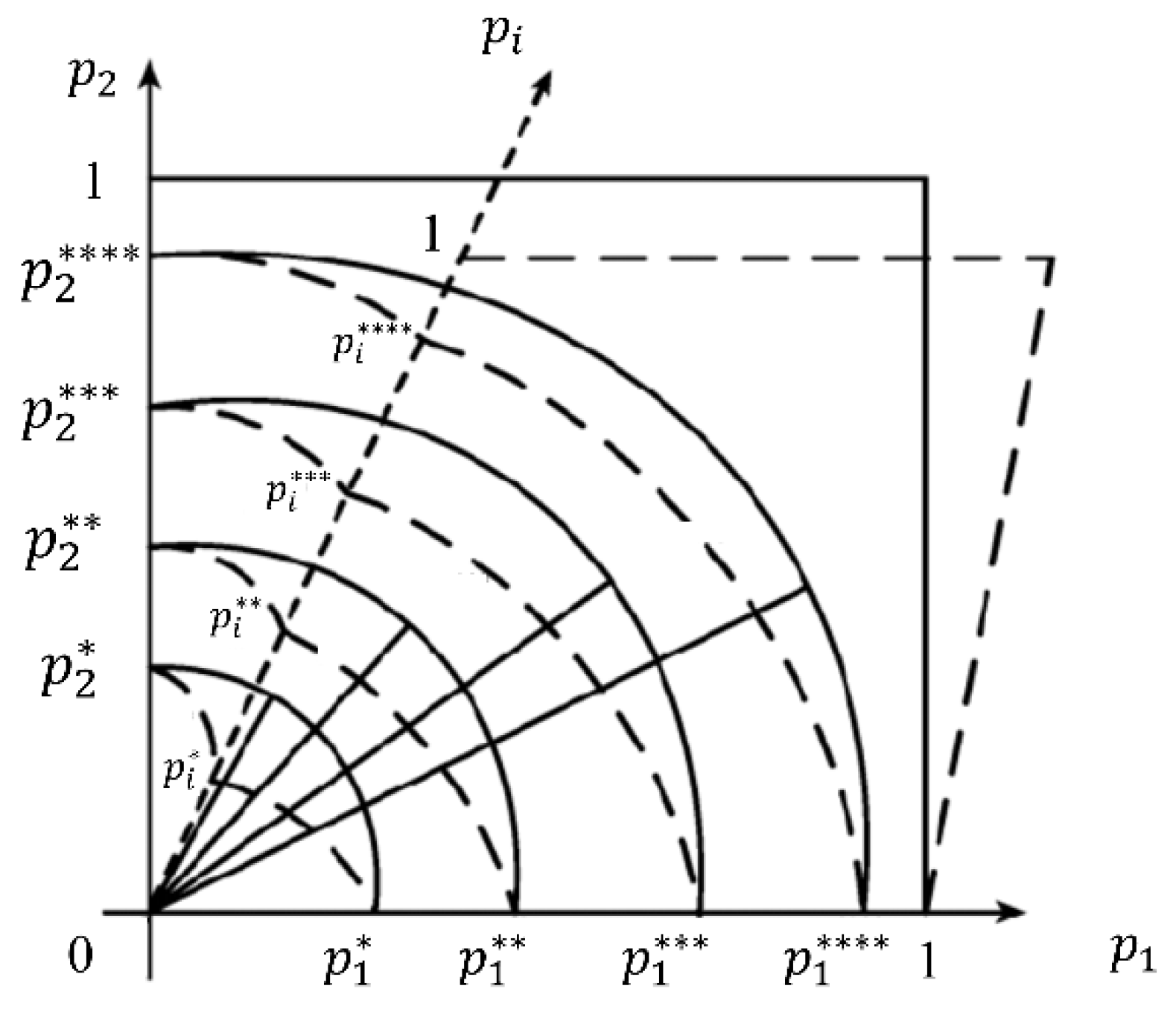
2.3. Calculable Decision-Making in Airspace
- . Partial overlap exists between the vertical layers of the airspace occupied by the obstacle and the flight area of the aircraft;
- . The vertical height of the flight area of the aircraft is completely within the vertical height range of the airspace occupied by the obstacle;
- . Even though no intersection exists between the vertical layers of the obstacle and the aircraft, the minimum height of the obstacle’s airspace and the maximum height of the aircraft’s airspace differ by less than ∆h, which represents the minimum safety interval.
| Algorithm 1: Pseudo-code of the discretization method for airspace planning. |
| 1 Initialize spatial hierarchy element matrix, path, path length, and cost; discrete coding for the airspace occupied by obstacles. 2 repeat 3 for aircraft i = 1 to n do 4 Initialize each aircraft position 5 repeat 6 Each code i + 1 based on calculated risk probability, the probability of using the available cell space, and time resources 7 then clear aircraft i to move to code (m,n); add code (m,n) to the operation path list; and update the aircraft’s position Xi + 1 Xi, path list, time and space cost, and path length 8 end if 9 until the aircraft reaches the destination 10 end for 11 Select the path with the lowest cost 12 repeat 13 if Distance>=min(SD) 14 then add i,j to the actual airspace operation code set 15 end if 16 If selected, the optimal route of temporal and spatial efficiency differs from the route of the next stage 17 Delete the selected optimal path, select a second optimal path 18 end if 19 until an optimal airspace operation that can meet all the minimum safety distances is selected 20 Update the scenario parameters of different routes in the airspace in the next time period 21 until the number of aircraft N is met 22 Output the optimal airspace code set, then smooth the spatiotemporal efficient optimal airspace operation route of adjacent discrete time points |
3. Results
3.1. Evaluation of Airspace Operational Efficiency
3.2. Improvement of Operation Efficiency by Discretization
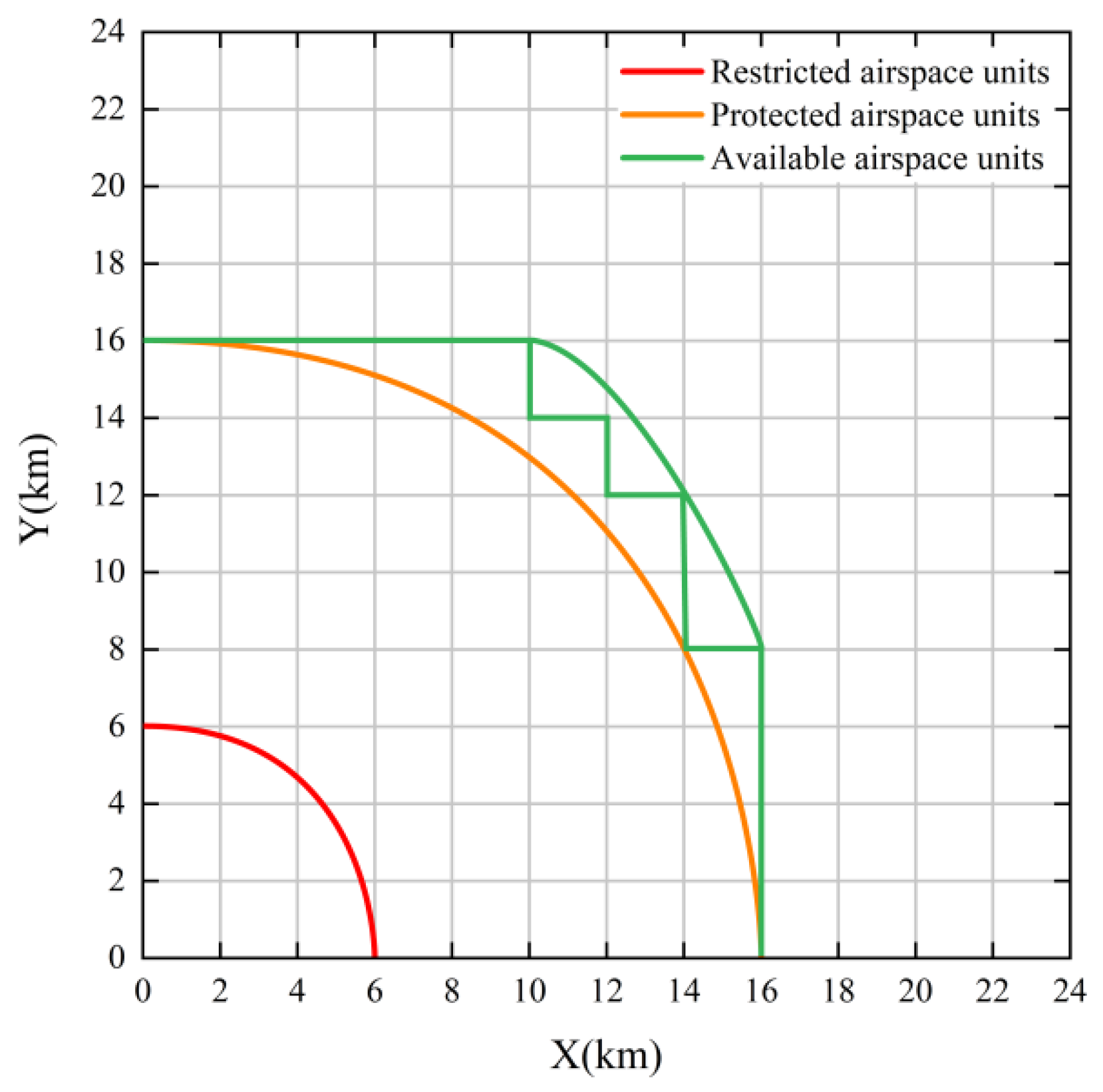
3.2.1. Safe Interval
3.2.2. Time Efficiency
3.2.3. Space Efficiency
4. Conclusions
- (1)
- A novel spatial discretization method suited for local airspace was proposed that can precisely represent any given airspace cell in three-dimensional space. This discretization method makes visualizing airspace use much easier, providing a theoretical foundation for air traffic controllers to guide aircraft more accurately as they alter their flight paths.
- (2)
- A new model was developed for evaluating the operational efficiency of airspace based on discretized data, focusing on three key elements, time efficiency, air traffic safety management, and airspace use. By combining the weighting of different indicators within the overall airspace performance layer, the model is capable of quantifying airspace operational performance more effectively.
- (3)
- Improvements were made to enhance operational efficiency within a specific airspace. The algorithm developed here uses multiple discrete trajectory planning techniques for corresponding flight paths, enabling air traffic controllers to guide flights through highly congested environments more efficiently while increasing overall airspace performance efficiency.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Index Survey

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator | Indicator Value | Threshold | Corresponding Grade | Evaluation | Normalization |
|---|---|---|---|---|---|
| Number of Conflicts | 0 | [0–0.1) | Excellent | Excellent | 0 |
| [0.1–0.5) | Good | ||||
| [0.5–0.9) | Medium | ||||
| [0.9–1) | Poor | ||||
| Potential Conflict Alert Time | 70 | [0–46) | Excellent | Good | 0.316 |
| [46–128) | Good | ||||
| [128–225) | Medium | ||||
| [225–415) | Poor | ||||
| Potential Conflict Minimum Distance | 8.87 | [42–48) | Excellent | Medium | 0.364 |
| [24–42) | Good | ||||
| [8–24) | Medium | ||||
| [0–8) | Poor | ||||
| Safety Management Level | 0.56 | [0.9–1) | Excellent | Good | 0.31 |
| [0.6–0.9) | Good | ||||
| [0.1–0.6) | Medium | ||||
| [0–0.1) | Poor |
| Indicator | Indicator Value | Threshold | Corresponding Grade | Evaluation | Normalization |
|---|---|---|---|---|---|
| Restricted Airspace Use Time | 0.027 | [0–0.1) | Excellent | Excellent | 0.13 |
| [0.1–0.5) | Good | ||||
| [0.5–0.9) | Medium | ||||
| [0.9–1) | Poor | ||||
| Peak Hour Delay | 766 | [0–206) | Excellent | Medium | 0.443 |
| [206–688) | Good | ||||
| [688–1114) | Medium | ||||
| [1114–1724) | Poor | ||||
| Average Arrival Delay | 548 | [0–206) | Excellent | Good | 0.374 |
| [206–688) | Good | ||||
| [688–1114) | Medium | ||||
| [1114–1724) | Poor | ||||
| Average Departure Delay | 461 | [0–206) | Excellent | Good | 0.336 |
| [206–688) | Good | ||||
| [688–1114) | Medium | ||||
| [1114–1724) | Poor | ||||
| Airspace Time Use Capability | 0.56 | [0.9–1) | Excellent | Medium | 0.324 |
| [0.6–0.9) | Good | ||||
| [0.2–0.6) | Medium | ||||
| [0–0.2) | Poor |
| Indicator | Indicator Value | Threshold | Corresponding Grade | Evaluation | Normalization |
|---|---|---|---|---|---|
| Route Use Rate | 0.191 | [0–0.1) | Excellent | Good | 0.236 |
| [0.1–0.5) | Good | ||||
| [0.5–0.9) | Medium | ||||
| [0.9–1) | Poor | ||||
| Airspace Spatial Use Capability | 11 | [15–17) | Excellent | Medium | 0.341 |
| [12–15) | Good | ||||
| [9–13) | Medium | ||||
| [5–9) | Poor | ||||
| Airspace Route Network Connectivity | 80 | [90–100) | Excellent | Good | 0.275 |
| [75–90) | Good | ||||
| [60–75) | Medium | ||||
| [0–60) | Poor | ||||
| Airspace Sector Saturation | 0.869 | [0.9–1) | Excellent | Good | 0.283 |
| [0.6–0.9) | Good | ||||
| [0.1–0.6) | Medium | ||||
| [0–0.1) | Poor | ||||
| Airport Approach and Departure Capacity | 0.613 | [0.8–1) | Excellent | Good | 0.268 |
| [0.6–0.8) | Good | ||||
| [0.2–0.6) | Medium | ||||
| [0–0.2) | Poor |
References
- Ye, K.P. Maintenance and accuracy analysis of regional reference frame based on reference station network. Mapp. Spat. Geogr. Inf. 2019, 42, 148–150+154. [Google Scholar]
- Zhang, X.G.; Lv, Z.P. On Maintenance of the Earth Frame of Reference. Bull. Surv. Mapp. Beijing 2009, 5, 1–4. [Google Scholar]
- Tong, X.; Ben, J.; Wang, Y.; Zhang, Y.; Pei, T. Efficient encoding and spatial operation scheme for aperture 4 hexagonal discrete global grid system. Int. J. Geogr. Inf. Sci. 2013, 27, 898–921. [Google Scholar] [CrossRef]
- Wambsganss, M.C. GPS outage impacts on the national airspace system. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar]
- Stankūnas, J.; Kondroška, V. Formation of methodology to model regional airspace with reference to traffic flows. Aviation 2012, 16, 69–75. [Google Scholar] [CrossRef]
- Kondroška, V.; Stankūnas, J. Analysis of airspace organization considering air traffic flows. Transport 2012, 27, 219–228. [Google Scholar] [CrossRef]
- Kaplan, C.; Dahm, J.; Oran, E.; Alexandrov, N.; Boris, J. Analysis of the monotonic Lagrangian grid as an air traffic simulation tool. J. Guid. Control Dyn. 2013, 36, 196–206. [Google Scholar] [CrossRef]
- An, J.X.; Wang, W.X.; Liu, Z.; Zhang, J.Q. A route planning method based on the airspace divided by grid method. Proc. Adv. Mater. Res. 2015, 1073–1076, 2381–2384. [Google Scholar] [CrossRef]
- Wang, S.; Li, Q.; Cao, X.; Li, H. Optimization of air route network nodes to avoid ‘three areas’ based on an adaptive ant colony algorithm. Trans. Nanjing Univ. Aeronaut. Astronaut. 2016, 33, 469–478. [Google Scholar]
- Matthews, B.; Nielsen, D.; Schade, J.; Chan, K.; Kiniry, M. Comparative study of metroplex airspace and procedures using machine learning to discover flight track anomalies. In Proceedings of the 2015 IEEE/AIAA 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–17 September 2015. [Google Scholar]
- Sergeeva, M.; Delahaye, D.; Mancel, C.; Vidosavljevic, A. Dynamic airspace configuration by genetic algorithm. J. Traffic Transp. Eng. Engl. Ed. 2017, 4, 300–314. [Google Scholar] [CrossRef]
- Gerdes, I.; Temme, A.; Schultz, M. Dynamic airspace sectorisation for flight-centric operations. Transp. Res. Pt. C-Emerg. Technol. 2018, 95, 460–480. [Google Scholar] [CrossRef]
- Gerdes, I.; Temme, A.; Schultz, M. From free-route air traffic to an adapted dynamic main-flow system. Transp. Res. Pt. C-Emerg. Technol. 2020, 115, 102633. [Google Scholar] [CrossRef]
- Yang, S.; He, Z.; Chen, Y.-P.P. GCOTraj: A storage approach for historical trajectory data sets using grid cells ordering. Inf. Sci. 2018, 459, 1–19. [Google Scholar] [CrossRef]
- Alam, S.; Chaimatanan, S.; Delahaye, D.; Feron, E. Metaheuristic Approach for Distributed Trajectory Planning for European Functional Airspace Blocks. J. Air Transp. 2018, 26, 81–93. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, P.; Li, Z.; Zou, X. A sector capacity assessment method based on airspace utilization efficiency. Proc. J. Phys. Conf. Ser. 2018, 976, 012014. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, H.; Hu, M.; Qiu, Q.; Liu, H. Analysis of safety characteristics of flight situation in complex low-altitude airspace. Adv. Mech. Eng. 2018, 10, 1687814018774656. [Google Scholar] [CrossRef]
- Miao, S.; Cheng, C.; Zhai, W. A low-altitude flight conflict detection algorithm based on a multilevel grid spatiotemporal index. ISPRS Int. J. Geo-Inf. 2019, 8, 289. [Google Scholar] [CrossRef]
- Zhu, Y.W.; Chen, Z.J.; Pu, F.; Wang, J.L. Research on the development of digital airspace system. Chin. Eng. Sci. 2021, 23, 135–143. [Google Scholar] [CrossRef]
- Chen, Y.T.; Hu, M.H.; Yu, L. Autonomous planning of optimal four-dimensional trajectory for real-time en-route airspace operation with solution space visualisation. Transp. Res. Part C 2022, 140, 103701. [Google Scholar] [CrossRef]
- Tluchor, T.; Kleczatsky, A.; Kraus, J. Division of VLL into Specific Airspaces for UAS Operation. In Proceedings of the 23rd International Scientific Conference on New Trends in Civil Aviation (NTCA), Prague, Czech Republic, 26–27 October 2022; pp. 171–176. [Google Scholar]
- Babel, L. Coordinated flight path planning for a fleet of missiles in high-risk areas. Robotica 2023, 41, 1568–1589. [Google Scholar] [CrossRef]
- Pongsakornsathien, N.; Bijjahalli, S.; Gardi, A.; Sabatini, R.; Kistan, T. A Novel Navigation Performance-based Airspace Model for Urban Air Mobility. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, Y.W.; Pu, F. Principle and application of spatial grid identification in airspace. Trans. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 2462–2474. [Google Scholar]
- Bujang, M.A.; Omar, E.D.; Baharum, N.A. A review on sample size determination for Cronbach’s alpha test: A simple guide for researchers. Malays. J. Med. Sci. MJMS 2018, 25, 85. [Google Scholar] [CrossRef] [PubMed]
- Abin, A.A.; Nabavi, S.; Moghaddam, M.E. Using social media for flight path safety assessment. Aircr. Eng. Aerosp. Technol. 2021, 93, 1664–1673. [Google Scholar] [CrossRef]
- ElSayed, M.; Mohamed, M. The Impact of Airspace Discretization on the Energy Consumption of Autonomous Unmanned Aerial Vehicles (Drones). Energies 2022, 15, 5074. [Google Scholar] [CrossRef]


| Level | Line Number | Latitude Interval (°) | Level Number | Column Number | Longitude Interval (°) |
|---|---|---|---|---|---|
| A | 1 | 1 | 1 | ||
| B | 2 | 2 | 2 | ||
| C | 3 | 3 | 3 | ||
| D | 4 | 4 | 4 | ||
| E | 5 | 5 | 5 | ||
| F | 6 | 6 | 6 | ||
| G | 7 | 7 | 7 | ||
| H | 8 | 8 | 8 | ||
| I | 9 | 9 | 9 | ||
| J | 10 | 10 | 10 | ||
| K | 11 | 11 | 11 | ||
| L | 12 | 12 | 12 | ||
| M | 13 | 13 | 13 | ||
| 14 | 14 | ||||
| 15 | 15 | ||||
| 16 | 16 |
| Level | Line Number | Latitude Interval (°) | Level Number | Column Number | Longitude Interval (°) |
|---|---|---|---|---|---|
| A | 1 | 1 | 1 | ||
| B | 2 | 2 | 2 | ||
| C | 3 | 3 | 3 | ||
| D | 4 | 4 | 4 |
| Overall Level | Objective Level | Indicator |
|---|---|---|
| Airspace system operating efficiency evaluation indicators | Air traffic safety | Number of conflicts , potential conflict alert time , potential conflict minimum distance safety management level |
| Airspace operation time | Average delay time , peak hour delay , average arrival delay time , average departure delay time , restricted airspace use time , airspace time use capability | |
| Airspace use rate | Route use rate , airspace spatial use capability , airspace route network connectivity , airspace sector saturation , airport approach and departure capacity | |
| Operational flexibility | Temporary flight adjustment capability , number of flights changing altitude , number of flights changing routes | |
| Operational effectiveness | Aircraft’s normal clearance rate , system equipment support capability , non-linear coefficient | |
| Cost efficiency | Cost conversion capability , personnel use efficiency , fuel consumption , personnel workload , delay cost |
| Internal Consistency of Indicators | |
|---|---|
| High | |
| Acceptable | |
| Some indicators are not reasonable, but still useful | |
| Should be reconsidered |
| Airspace Operational Efficiency Indicator | Approval Degree | |
|---|---|---|
| Air traffic safety | 0.845 | |
| Airspace operation time | 0.883 | |
| Airspace use rate | 0.781 | |
| Operational flexibility | 0.770 | |
| Operational effectiveness | 0.725 | |
| Cost efficiency | 0.671 |
| Operational Efficiency Value | Assessment Result |
|---|---|
| Excellent | |
| Good | |
| Medium | |
| Poor |
| Operational Efficiency Target Layer | ||||||
|---|---|---|---|---|---|---|
| 0 | 0.300 | 0.310 | 0.360 | 0.430 | 1 | |
| 0 | 0.270 | 0.290 | 0.322 | 0.397 | 1 | |
| 0 | 0.256 | 0.278 | 0.311 | 0.357 | 1 | |
| 0 | 0.170 | 0.197 | 0.203 | 0.258 | 1 | |
| 0 | 0.170 | 0.205 | 0.211 | 0.269 | 1 | |
| 0 | 0.087 | 0.094 | 0.105 | 0.112 | 1 |
| Judgment Threshold | ||||
|---|---|---|---|---|
| Threshold Value | 0.01679 | 0.02379 | 0.03907 | 0.06475 |
| Judgment Threshold | ||||
| Threshold Value | 0.000282 | 0.000566 | 0.001526 | 0.004193 |
| Overall Level | Objective Level | ||
|---|---|---|---|
| Safe Interval | Time Efficiency | Space Efficiency | |
| Safe Interval | (1, 1) | (0.18, 0.27) | (0.37, 0.48) |
| Time Efficiency | (3.75, 5.56) | (1, 1) | (3.5, 3.7) |
| Space Efficiency | (2.1, 2.7) | (0.27, 0.29) | (1, 1) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, D.; Chen, Z.; Xie, X.; Chen, J. Discretization Method to Improve the Efficiency of Complex Airspace Operation. Aerospace 2023, 10, 780. https://doi.org/10.3390/aerospace10090780
Zhu D, Chen Z, Xie X, Chen J. Discretization Method to Improve the Efficiency of Complex Airspace Operation. Aerospace. 2023; 10(9):780. https://doi.org/10.3390/aerospace10090780
Chicago/Turabian StyleZhu, Daiwu, Zehui Chen, Xiaofan Xie, and Jiuhao Chen. 2023. "Discretization Method to Improve the Efficiency of Complex Airspace Operation" Aerospace 10, no. 9: 780. https://doi.org/10.3390/aerospace10090780