
Analyzing the Indirect Effects of Lightning on Unmanned Aerial Vehicle Navigation Receivers


Abstract
:1. Introduction
- Our analysis shows that lightning pulses can cause the receiver to become saturated or even stop functioning, thereby reducing its sensitivity and dynamic range.
- To simulate the effects of lightning interference on a UAV navigation receiver, we developed a behavioral model. This model assesses the receiver’s response under various lightning pulse conditions, specifically examining the effects on the sensitivity and dynamic range.
- To assess the UAV navigation receiver’s response to sudden electrical disturbances and its vulnerability to lightning-induced interference, we conducted tests by injecting signals directly into its input pins. These experiments established the thresholds at which interference occurs and the interference levels that cause damage.
2. Lightning Pulse Blocking Interference Mechanism
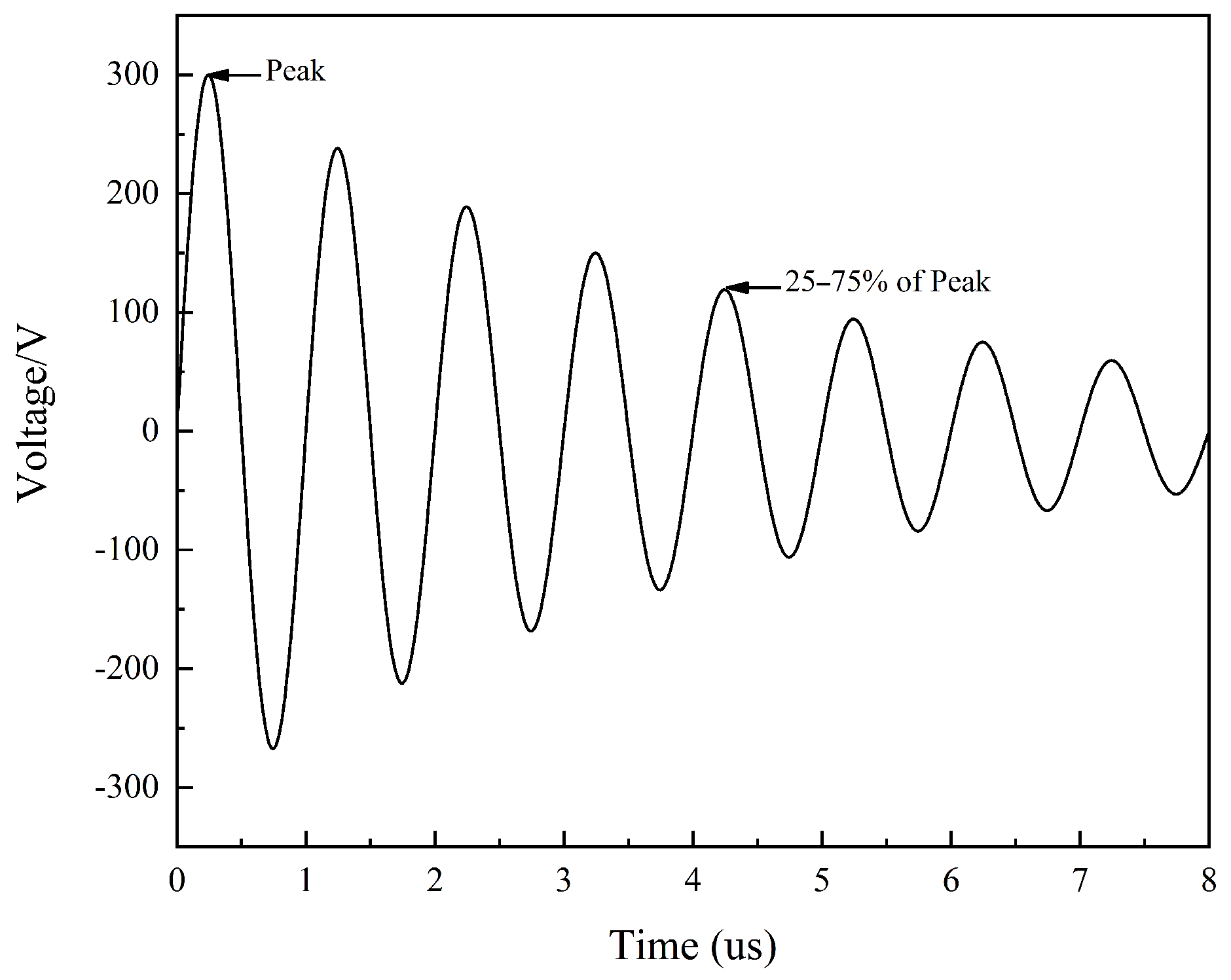
2.1. Standardized Lightning Pulse
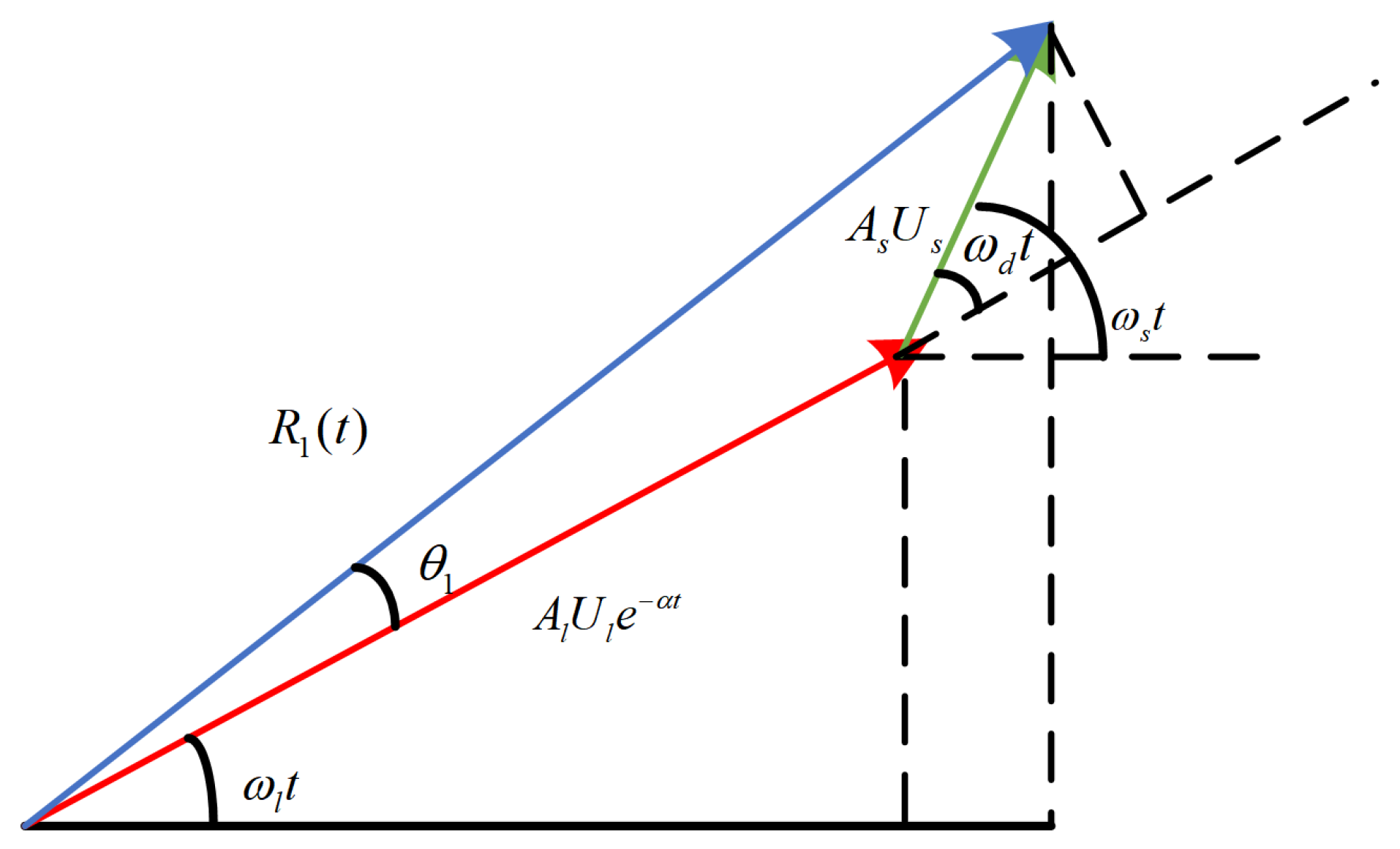
2.2. Analysis of the Blocking Interference Mechanism
3. Lightning Pulse Injection Simulation
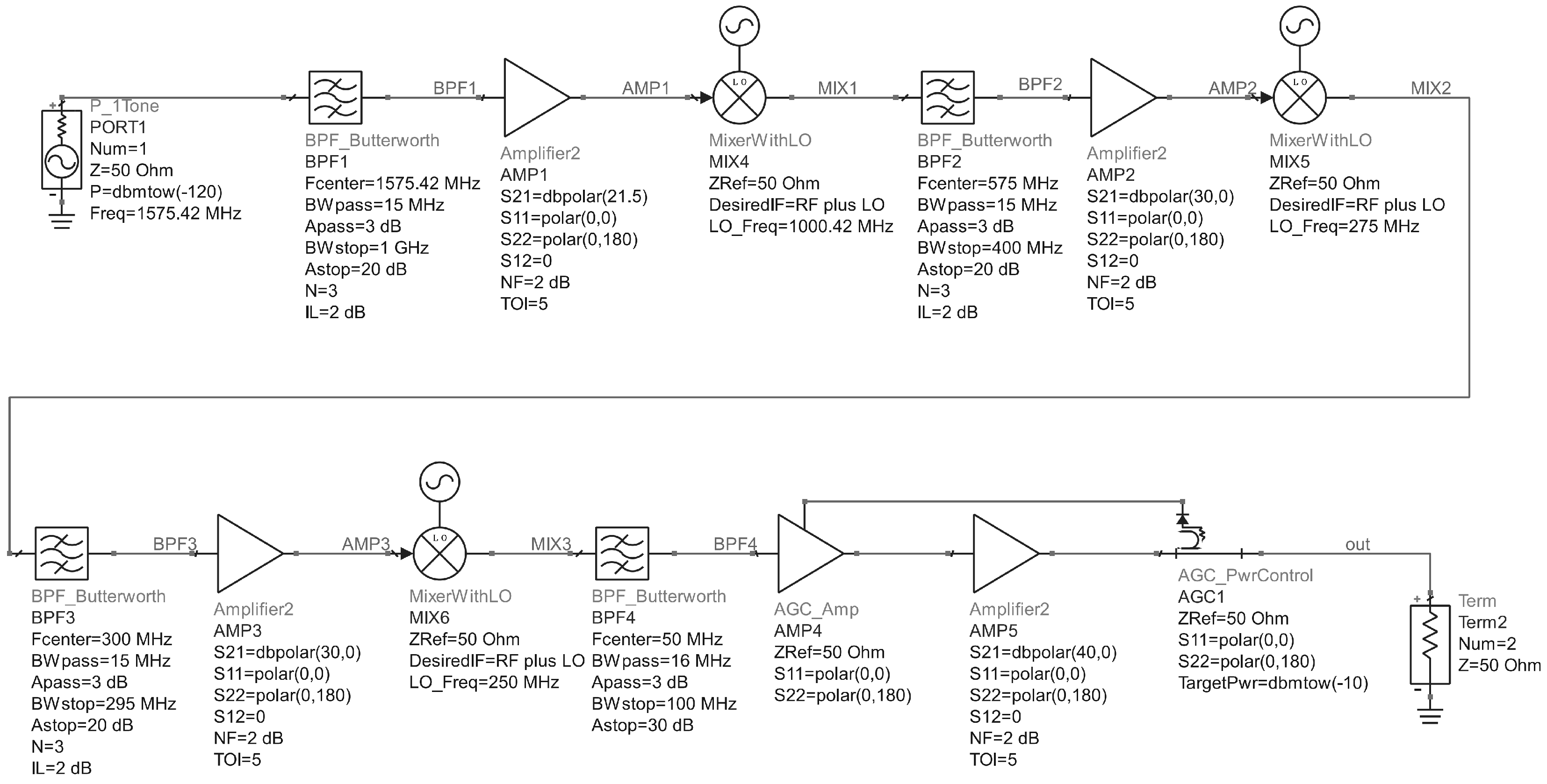
3.1. Modeling the RF Front-End Circuit of the BDS Receiver
3.2. Interference Effect Simulation and Result Analysis
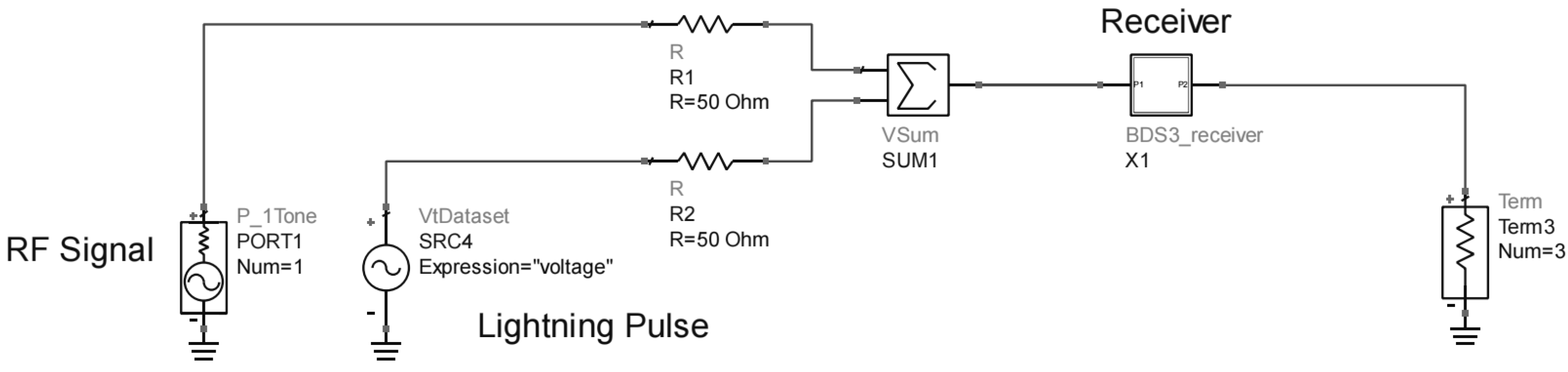
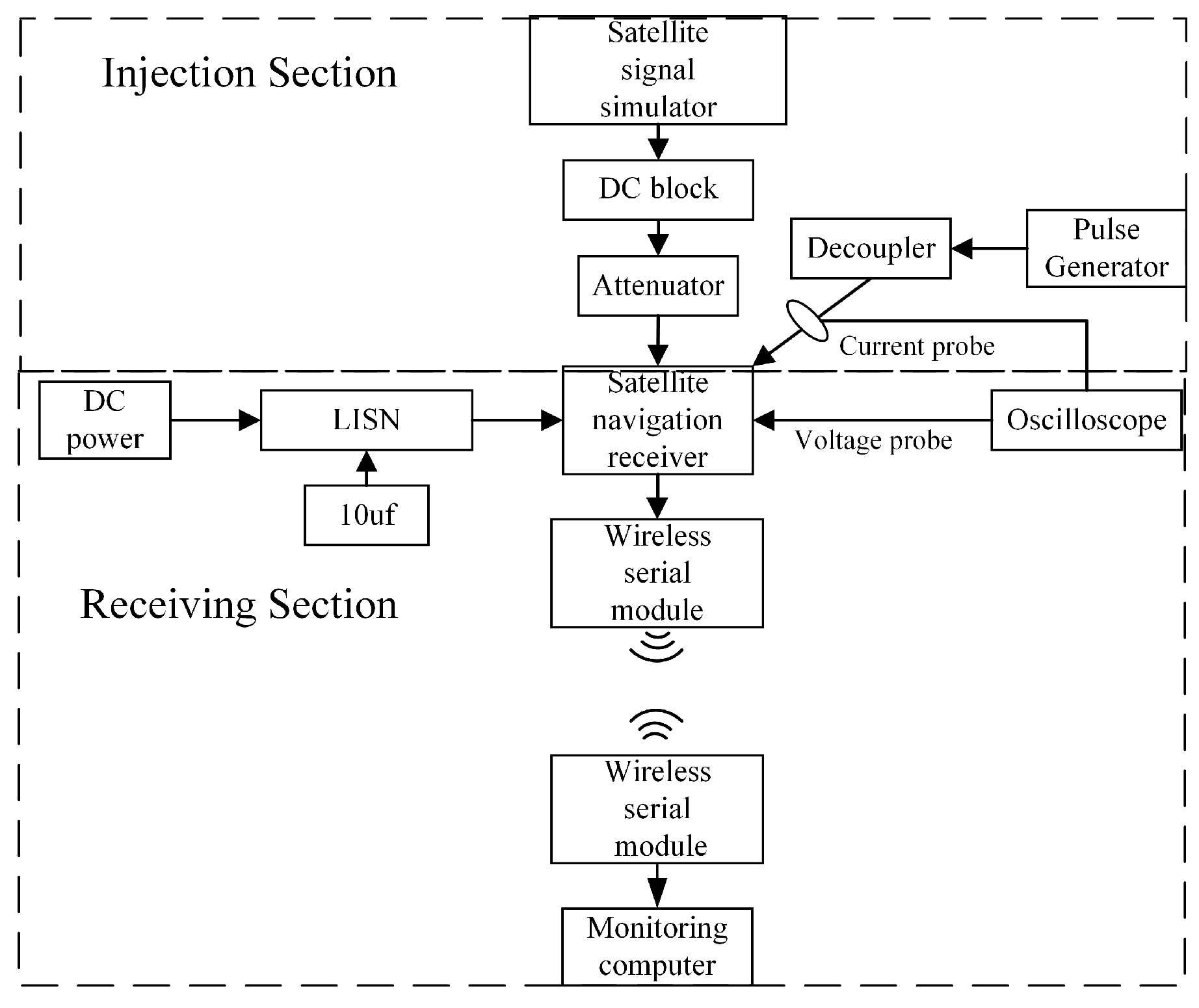
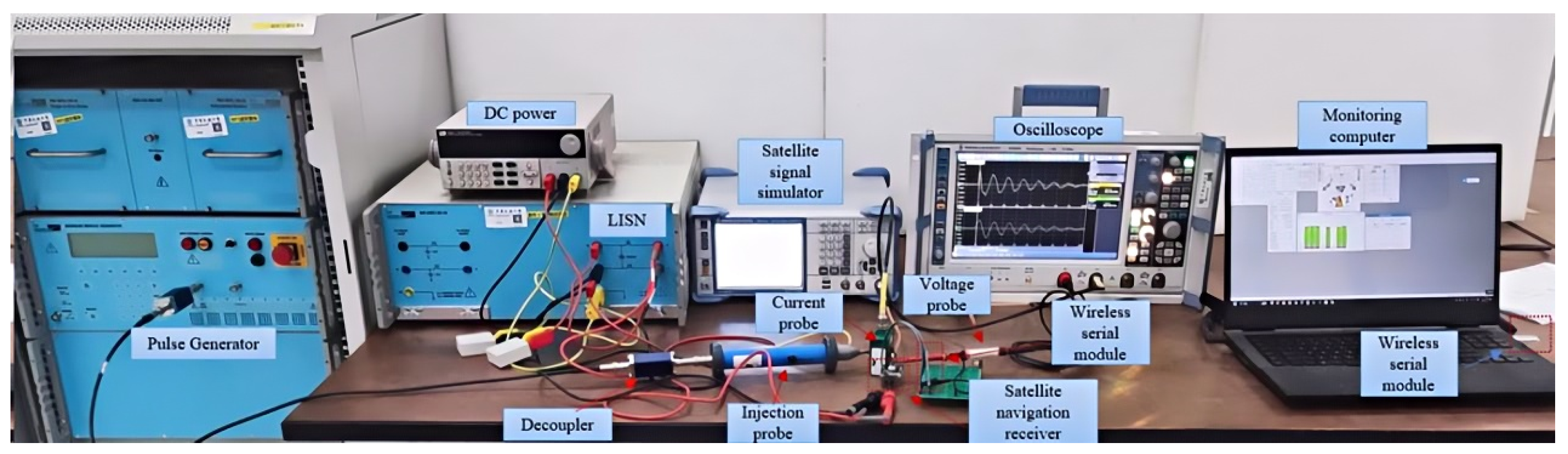
4. Lightning Pulse Injection Effect Test
4.1. Test Platform
4.2. Test Results Analysis
5. Conclusions
- (1)
- By constructing a simulation model for lightning pulse injection and analyzing the interference mechanism, we elucidate the impact of lightning pulses on the BDS receiver. As the peak voltage of the lightning pulse increases, the LNA enters a state of gain compression. When the peak value reaches 450 V, the LNA’s gain becomes negative, indicating damage. This results in a decrease in the overall gain of the receiver and an increase in the noise floor, significantly affecting the receiver’s sensitivity and dynamic range.
- (2)
- The test results indicate that the sensitivity of the receiver decreases dramatically when the peak voltage of the lightning pulse coupled to the navigation receiver exceeds 250 V. This can be explained by the blocking interference mechanism and simulation results. The increase in the lightning pulse voltage causes the dynamic range of the LNA to become insufficient, so that LNA operates in the nonlinear region, thus decreasing the sensitivity of the receiver. When the peak voltage exceeds the damage threshold of the receiver, the receiver will no longer display positioning information, at which point the it can be considered damaged.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yin, Y.; Wang, Z.; Zheng, L.; Su, Q.; Guo, Y. Autonomous UAV Navigation with Adaptive Control Based on Deep Reinforcement Learning. Electronics 2024, 13, 2432. [Google Scholar] [CrossRef]
- Cabello, M.R.; Fernández, S.; Pous, M.; Pascual-Gil, E.; Angulo, L.D.; López, P.; Riu, P.J.; Gutierrez, G.G.; Mateos, D.; Poyatos, D.; et al. SIVA UAV: A case study for the EMC analysis of composite air vehicles. IEEE Trans. Electromagn. Compat. 2017, 59, 1103–1113. [Google Scholar] [CrossRef]
- Ni, H.; Zhu, Q.; Hua, B.; Mao, K.; Pan, Y.; Ali, F.; Zhong, W.; Chen, X. Path Loss and Shadowing for UAV-to-Ground UWB Channels Incorporating the Effects of Built-Up Areas and Airframe. IEEE Trans. Intell. Transp. Syst. 2024, 1–12. [Google Scholar] [CrossRef]
- Cooray, V. An Introduction to Lightning; Springer: Berlin/Heidelberg, Germany, 2015; Volume 201, pp. 247–280. [Google Scholar]
- Kim, Y.; Jo, J.; Kim, D.; Lee, H.; Myong, R. Effects of lightning on UAM aircraft: Complex zoning and direct effects on composite prop-rotor blade. Aerosp. Sci. Technol. 2022, 124, 107560. [Google Scholar] [CrossRef]
- Haohan, H.; Hangfan, Z.; Junhai, L.; Kuanrong, L.; Biao, P. Automatic and intelligent line inspection using UAV based on beidou navigation system. In Proceedings of the 2019 6th International Conference on Information Science and Control Engineering (ICISCE), Shanghai, China, 20–22 December 2019; pp. 1004–1008. [Google Scholar]
- Wang, Y.p.; Wei, G.h.; Li, W.; Pan, X.d.; Shang, Z.f.; Wan, H.j. Mechanism modeling and verification of receiver with in-band dual-frequency blocking jamming. Trans. Beijing Inst. Technol. 2018, 38, 709–714. [Google Scholar]
- Zhang, Q.; Wang, Y.; Cheng, E.; Ma, L.; Chen, Y. Investigation on the Effect of the B1I Navigation Receiver Under Multifrequency Interference. IEEE Trans. Electromagn. Compat. 2022, 64, 1097–1104. [Google Scholar] [CrossRef]
- Meng, Y.; Cai, S.; Li, Y.; Su, D.; Shang, X.; Li, C.; Yao, W. Modeling of Airborne Ultrashort Wave Radio Receiver and Analysis of Lightning Interference Effect. In Proceedings of the 2022 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Beijing, China, 1–4 September 2022; pp. 575–577. [Google Scholar] [CrossRef]
- Fan, Y.; Cheng, E.; Wei, M.; Zhang, Q.; Chen, Y. Effects of CW interference on the BDS receiver and analysis on the coupling path of electromagnetic energy. IEEE Access 2019, 7, 155885–155893. [Google Scholar] [CrossRef]
- Zhang, W.; Shi, Y.; He, Y.; Shen, J.; Pan, X.; Fang, Z.; Chen, H. Study on damage effects of lightning electromagnetic pulse on typical airborne GPS module. High Power Laser Part. Beams 2021, 33, 22–28. [Google Scholar]
- Huang, X.; Wang, Y.; Chen, Y. Analysis of electromagnetic interference effect of the pulse interference on the navigation receiver. Int. J. Antennas. Propag. 2022, 2022, 3049899. [Google Scholar] [CrossRef]
- Rimal, H.P.; Reatti, A.; Corti, F.; Lozito, G.M.; Antonio, S.Q.; Faba, A.; Cardelli, E. Protection from indirect lightning effects for power converters in avionic environment: Modeling and experimental validation. IEEE Trans. Ind. Electron. 2020, 68, 7850–7862. [Google Scholar] [CrossRef]
- SAE ARP 5412B:2013; Aircraft Lightning Environment and Related Test Waveforms. SAE International: Warrendale, PA, USA, 2013.
- Zhang, Q.; Wang, Y.; Cheng, E.; Chen, Y.; Ma, L.; Zhang, Z. Investigation on prediction method of electromagnetic interference in the tracking loop of navigation receiver. J. Electron. Inf. Techn. 2021, 43, 3656–3661. [Google Scholar]
- Zhao, H.; Zhang, S. Electronic Warfare Theory and Methods; National Defense Industry Press: Beijing, China, 2010; pp. 124–184. [Google Scholar]
- Li, W.; Wei, G.; Pan, X.; Sun, S. Blocking jamming effect prediction method under multi-frequency in-band radiation environment for spectrum-dependent equipment. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 715–723. [Google Scholar]
- Korsch, H.J.; Klumpp, A.; Witthaut, D. On two-dimensional Bessel functions. J. Phys. A Math. Gen. 2006, 39, 14947. [Google Scholar] [CrossRef]
- Ma, Z.; Liu, J.; Duan, Z.; Shi, C.; He, S. Analysis of Indirect Lightning Effects on Low-Noise Amplifier and Protection Design. Electronics 2023, 12, 4912. [Google Scholar] [CrossRef]
- Mansson, D.; Thottappillil, R.; Backstrom, M.; Lundén, O. Vulnerability of European rail traffic management system to radiated intentional EMI. IEEE Trans. Electromagn. Compat. 2008, 50, 101–109. [Google Scholar] [CrossRef]
- Fan, Y.; Cheng, E.; Wei, M.; Cheng, Y. Simulation Research on GPS RF Front-End Receiving Circuit with Super-Heterodyne Structure. J. Ordnance Equip. Eng. 2020, 41, 117–122. [Google Scholar]
- Fan, L.; Pi, Y.; Li, J. Principle and System of Beidou Satellite Navigation; Publishing House of Electronics Industry: Beijing, China, 2021. [Google Scholar]
- Rohde, U.; Whitaker, J.; Zahod, H. Communications Receivers: Principles and Design; McGraw Hill: New York, NY, USA, 2018; pp. 239–258. [Google Scholar]
- Xu, X. ADS2011 RF Circuit Design and Simulation Example; Publishing House of Electronics Industry: Beijing, China, 2014; pp. 424–455. [Google Scholar]
- Liu, L.; Du, Z. Influence of Microwave Pulse Power on the Burnout Effect of the AlGaN/GaN HEMT in a LNA. In Proceedings of the 2019 IEEE 6th International Symposium on Electromagnetic Compatibility (ISEMC), Nanjing, China, 1–4 November 2019; pp. 1–5. [Google Scholar]
- RTCA/DO-160G; Environmental Conditions and Test Proceduresfor Airborne Equipment. RTCA: Washing, DC, USA, 2010.
- Mao, Q.; Huang, L.; Xiang, Z.; Zhu, D.; Meng, J. High-power microwave pulse induced failure on InGaP/GaAs heterojunction bipolar transistor. Microelectron. Reliab. 2022, 139, 114848. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sensitivity | ≥−137 dBm |
| Dynamic Range | 131 dB |
| Operating Frequency Band | B1C |
| Intermediate Frequency Output Frequency | 50 MHz |
| Intermediate Frequency Output Power | −10 to 0 dBm |
| Intermediate Frequency Output Bandwidth | 16 MHz |
| Voltage Peak | Sensitivity | Dynamic Range | Out Power | System Gain |
|---|---|---|---|---|
| 0 V | ≥−137 dBm | 132 dB | −6.998 dBm | 123.002 dB |
| 200 V | ≥−130 dBm | 125 dB | −9.665 dBm | 118.913 dB |
| 450 V | ≥−116 dBm | 111 dB | −20.348 dBm | 109.651 dB |
| Test Equipment | Type | Function |
|---|---|---|
| DC power supply | E3631A (Agilent, Santa Clara, CA, USA) | Power supply |
| Line impedance stabilization network | DN-LISN160 (EMC PARTNER AG, Laufen, Switzerland) | Prevents interference |
| Satellite signal simulator | SMBV100A (Rohde Schwarz, Munich, Germany) | Provides BD signal |
| Oscilloscope | RTO2044 (Rohde Schwarz, Germany) | Monitors currents and voltage |
| Pulse generator | AG-MIG-OS-MB (EMC PARTNER AG, Switzerland) | Generates pulses |
| Injection probe | CN-MIG-TT (EMC PARTNER AG, Switzerland) | Injects pulses |
| Wireless serial module | NRF24L01 (NiceRF, Shenzhen, China) | Transmission data |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; He, S.; Duan, Z.; Liu, J. Analyzing the Indirect Effects of Lightning on Unmanned Aerial Vehicle Navigation Receivers. Aerospace 2024, 11, 810. https://doi.org/10.3390/aerospace11100810
Ma Z, He S, Duan Z, Liu J. Analyzing the Indirect Effects of Lightning on Unmanned Aerial Vehicle Navigation Receivers. Aerospace. 2024; 11(10):810. https://doi.org/10.3390/aerospace11100810
Chicago/Turabian StyleMa, Zhenyang, Shaonan He, Zhaobin Duan, and Jiahao Liu. 2024. "Analyzing the Indirect Effects of Lightning on Unmanned Aerial Vehicle Navigation Receivers" Aerospace 11, no. 10: 810. https://doi.org/10.3390/aerospace11100810