
Flight-Based Control Allocation: Towards Human–Autonomy Teaming in Air Traffic Control †


Abstract
:1. Introduction
2. Flight-Based Control Allocation
2.1. Theoretical Underpinnings
2.2. Towards a Parallel ATC System
2.3. Technology Enablers
3. Exploratory Experiment
3.1. Overview and Goal
3.2. Participants
3.3. Apparatus
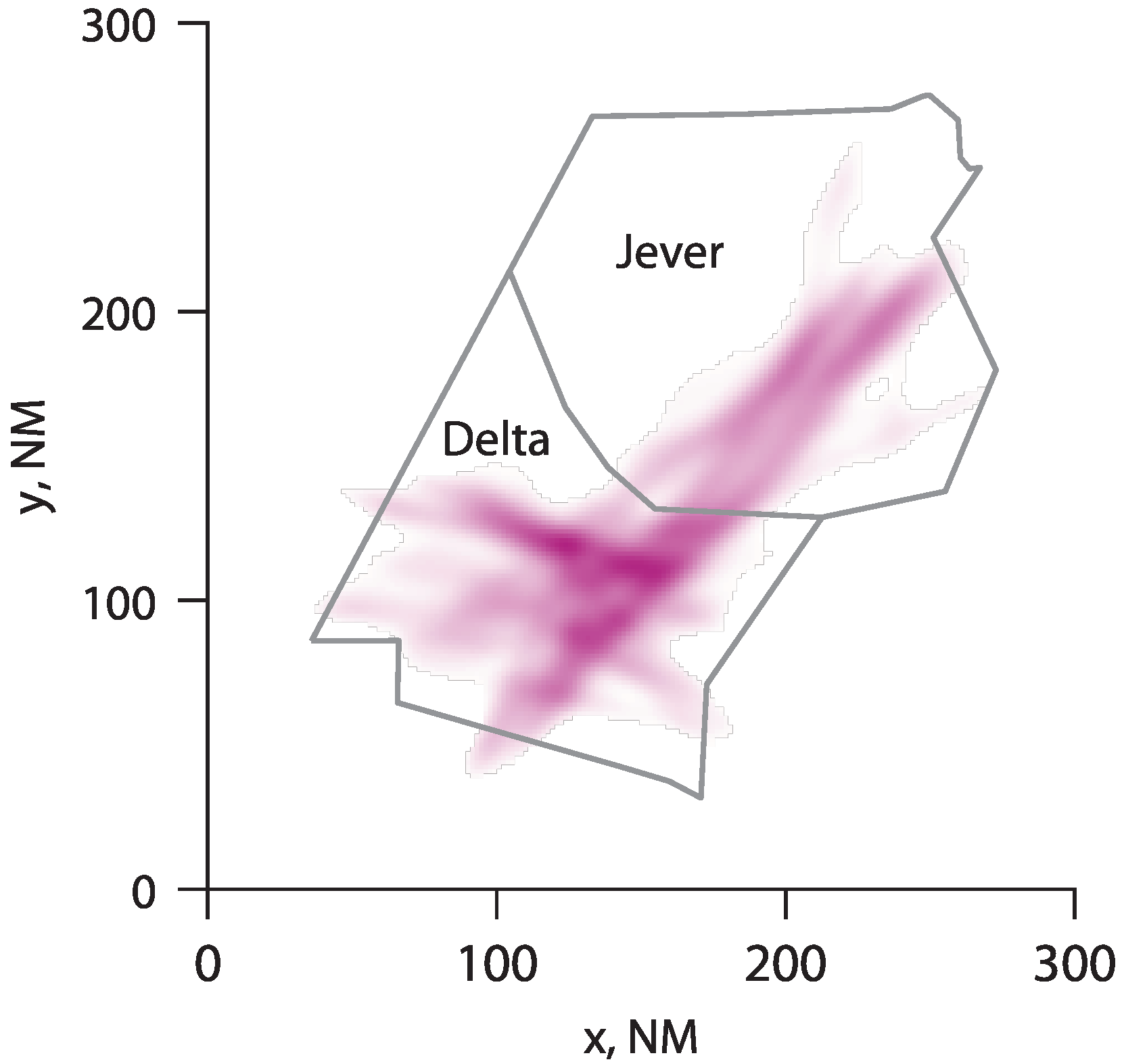
3.4. Airspace and Traffic Scenario
3.5. Automation
- Ensuring sufficient separation between automated flights (5 NM horizontally, 1000 ft vertically).
- Delivering flights at their exit point and transfer level while climbing as early as possible and descending as late as possible.
- Descending arrivals to FL260 for transfer to lower area control.
3.6. Procedure
3.7. Independent Variable
3.8. Control Variables
- Airspace and traffic sample: As described in Section 3.4.
- Atmospheric conditions: International standard atmosphere without wind.
- Automation capabilities: As described in Section 3.5.
- No voice communication: All instructions were transmitted via CPDLC.
- No pilot or CPDLC transmission delays.
- ATCO support systems: Only VERA and short-term conflict alert (STCA).
3.9. Dependent Measures
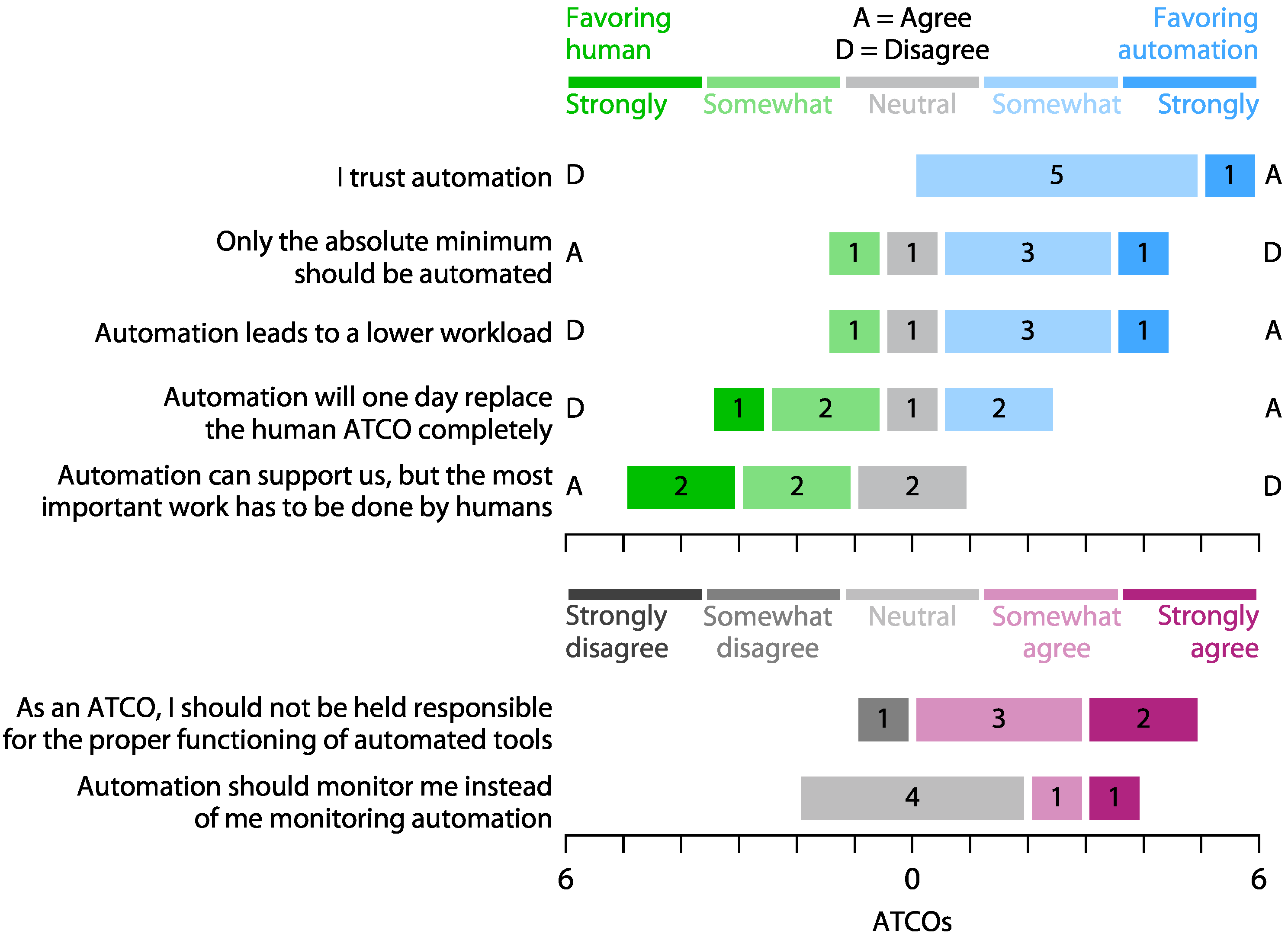
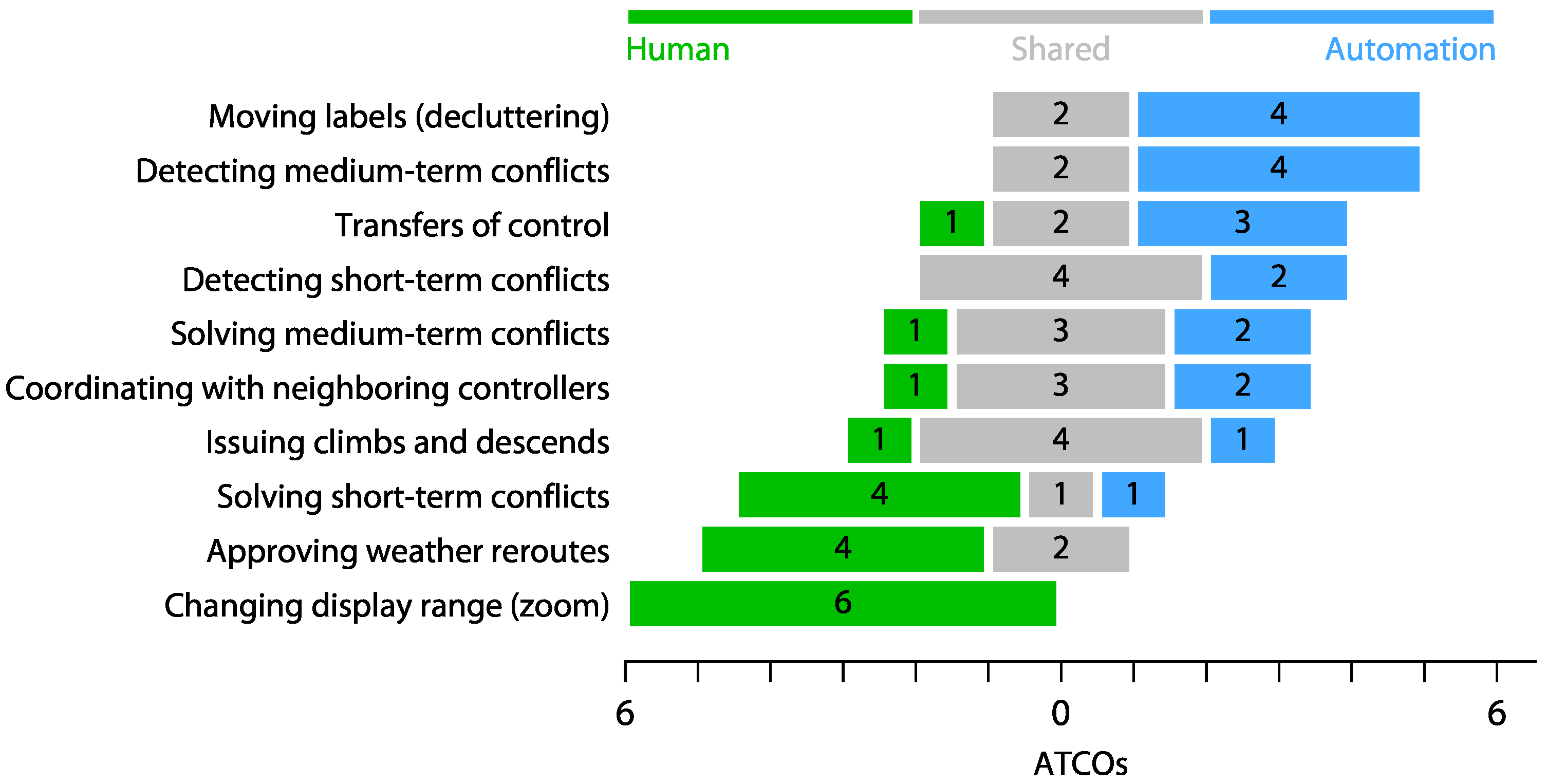
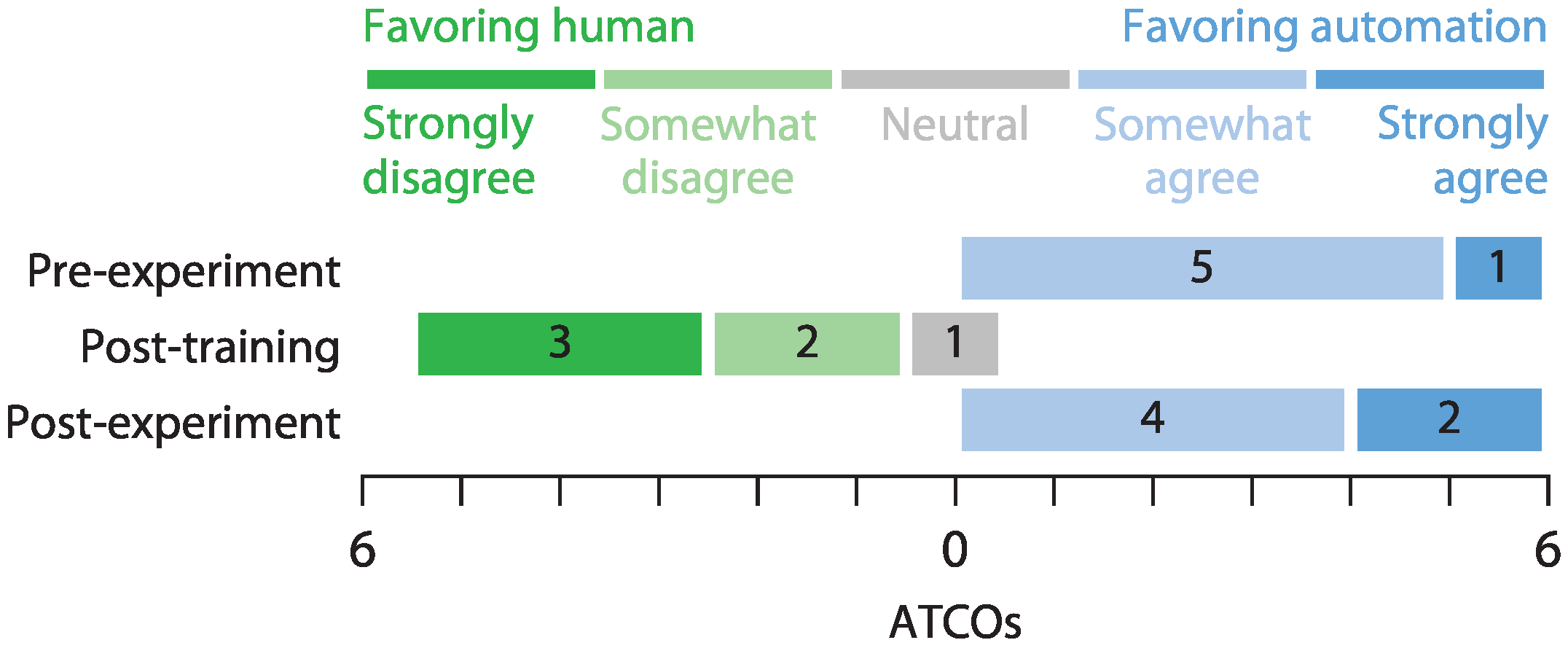
- Pre-experiment questionnaire: Prior to the simulation session, a short questionnaire using both open-ended and Likert-type scale questions aimed to probe the ATCOs’ stances and preconceptions on what automation could offer them. They were also asked to indicate which tasks and functions they would like or expect automation to support and/or take over.
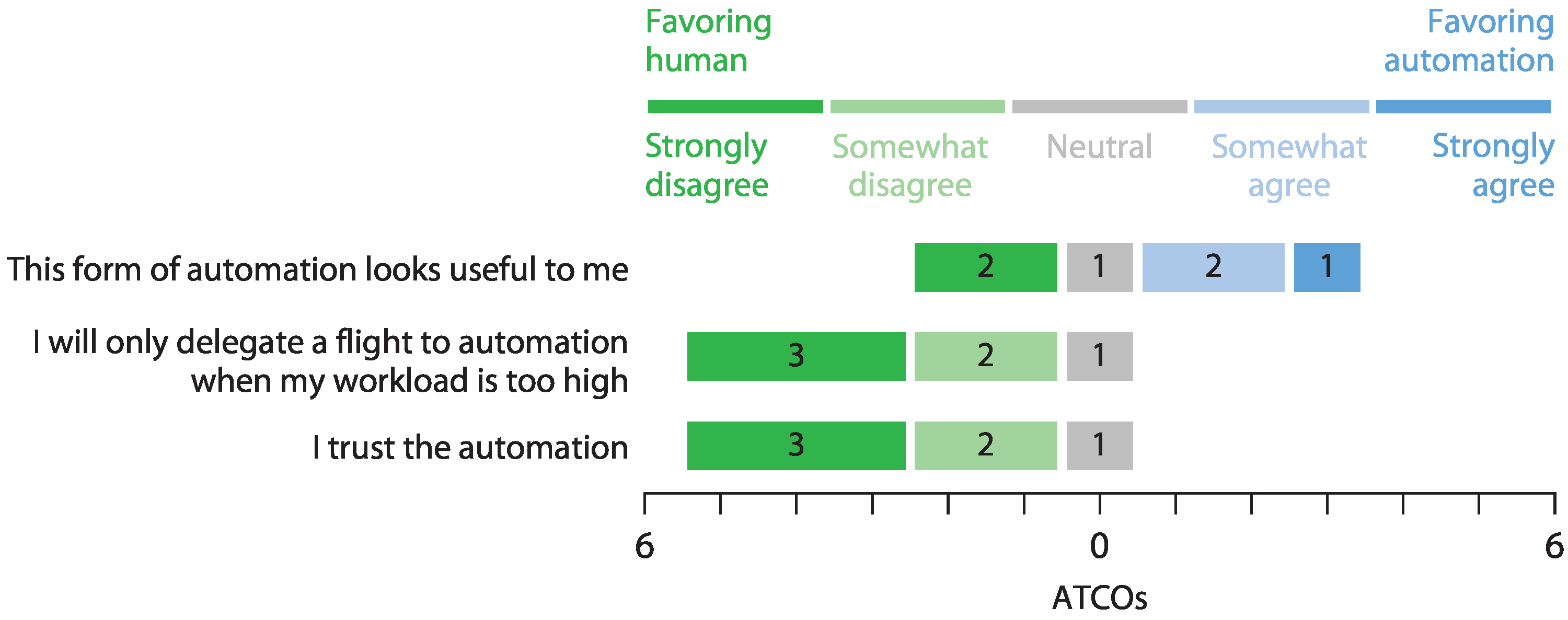
- Post-training questionnaire: After brief exposure to automation in a flight-based control allocation context, the ATCOs expressed their initial opinions on the new concept.
- Experiment trial:
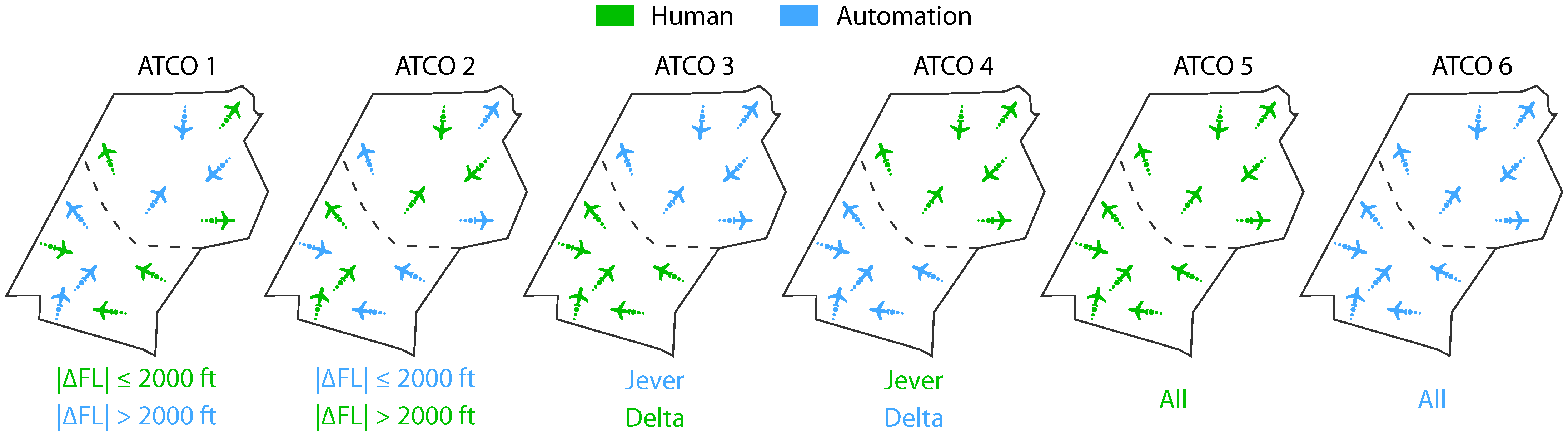
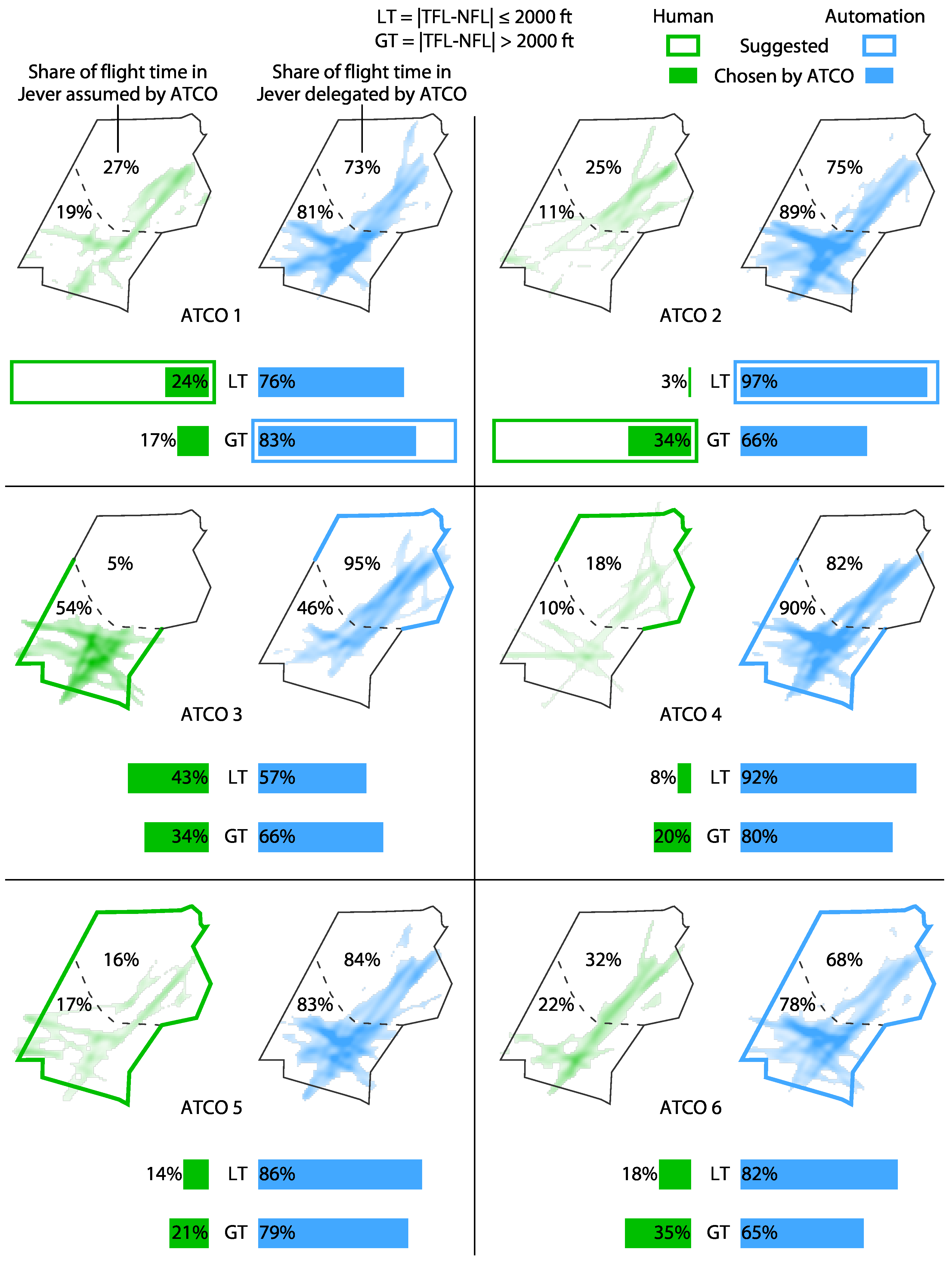
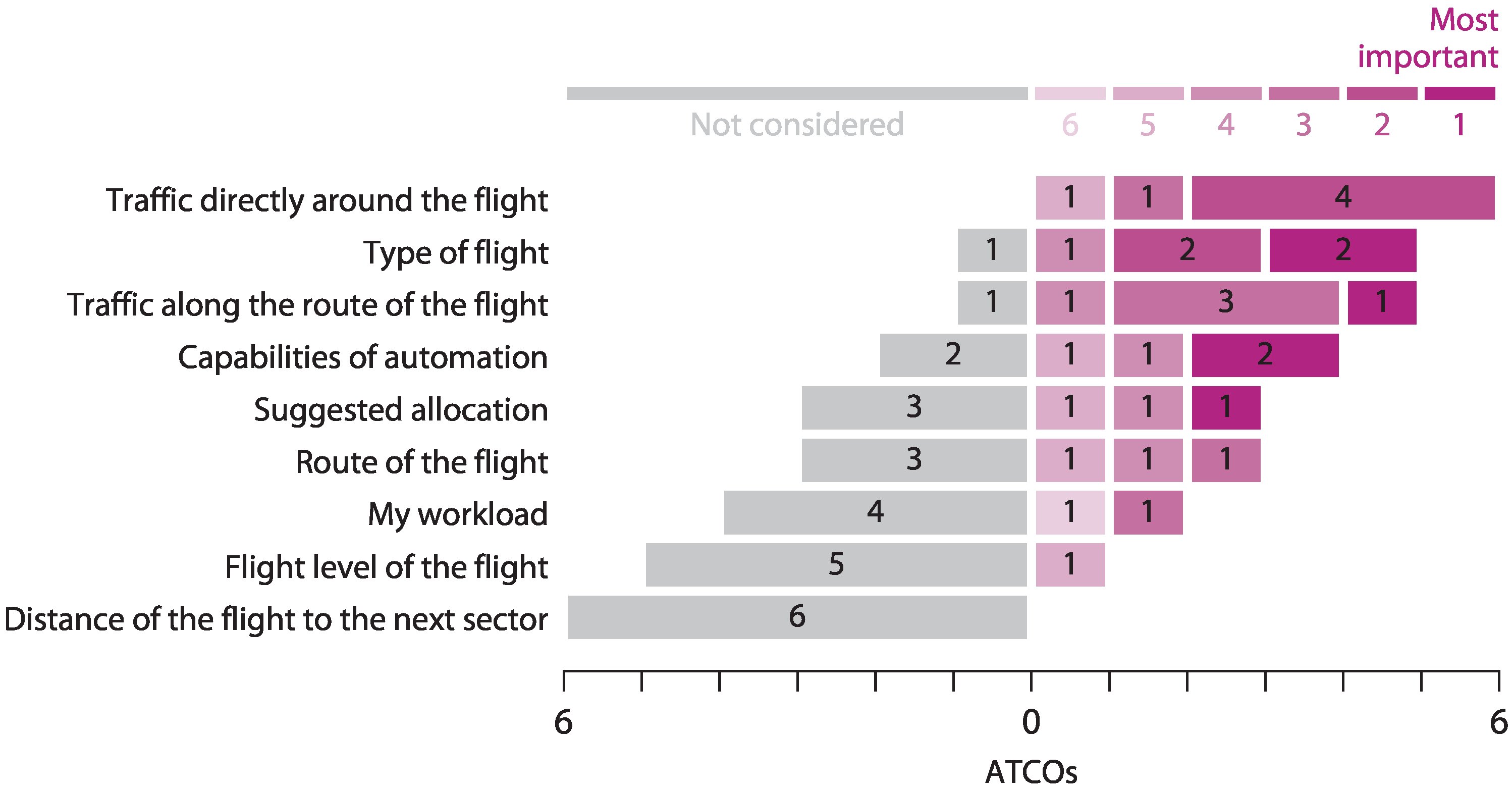
- Chosen flight allocations: Each ATCO was presented with a unique initial flight allocation, but was free to revise the suggested allocation as they saw fit by either delegating flights to automation or taking back control from automation at any time. As such, their level of appreciation for the initial allocation could be observed.
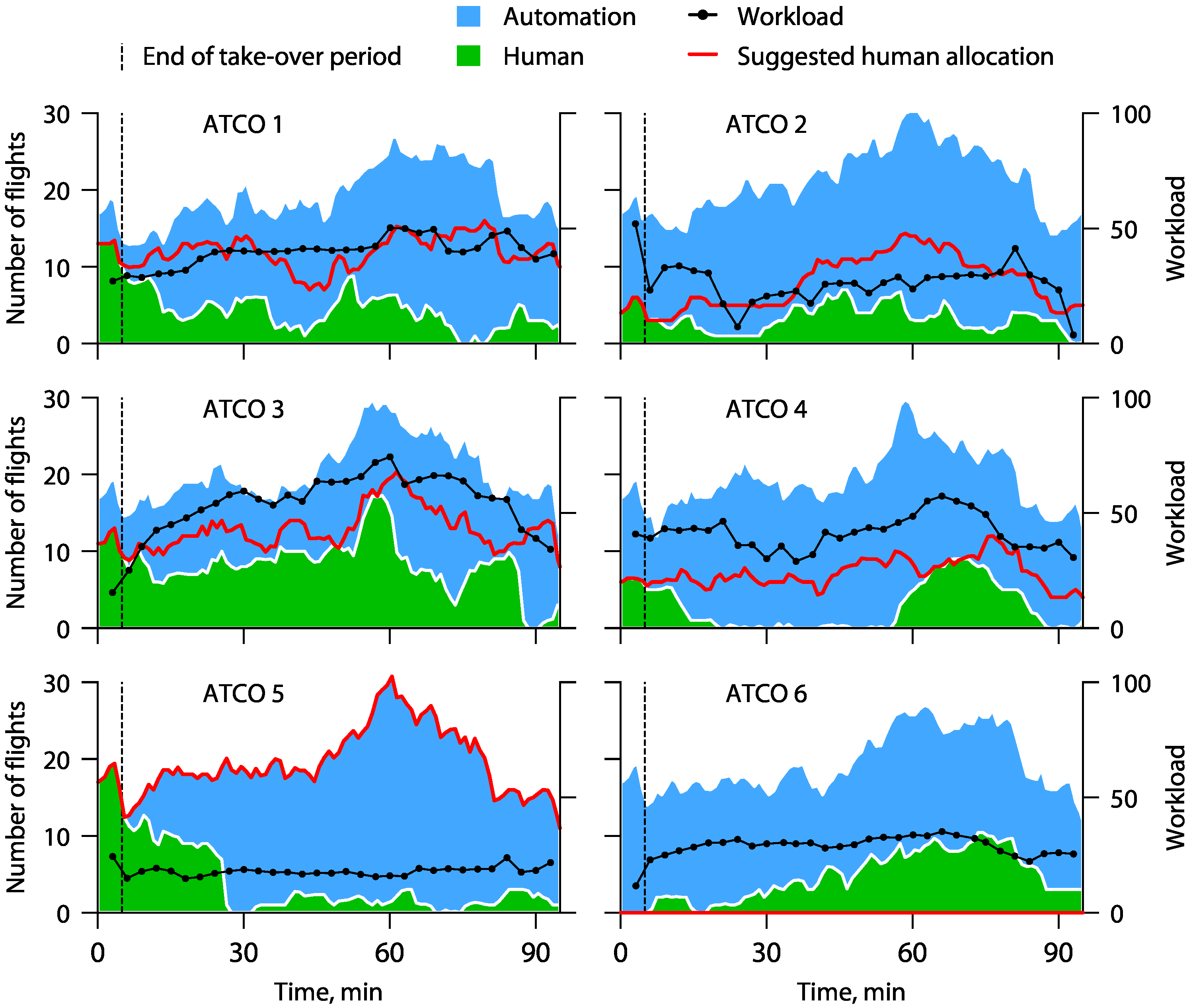
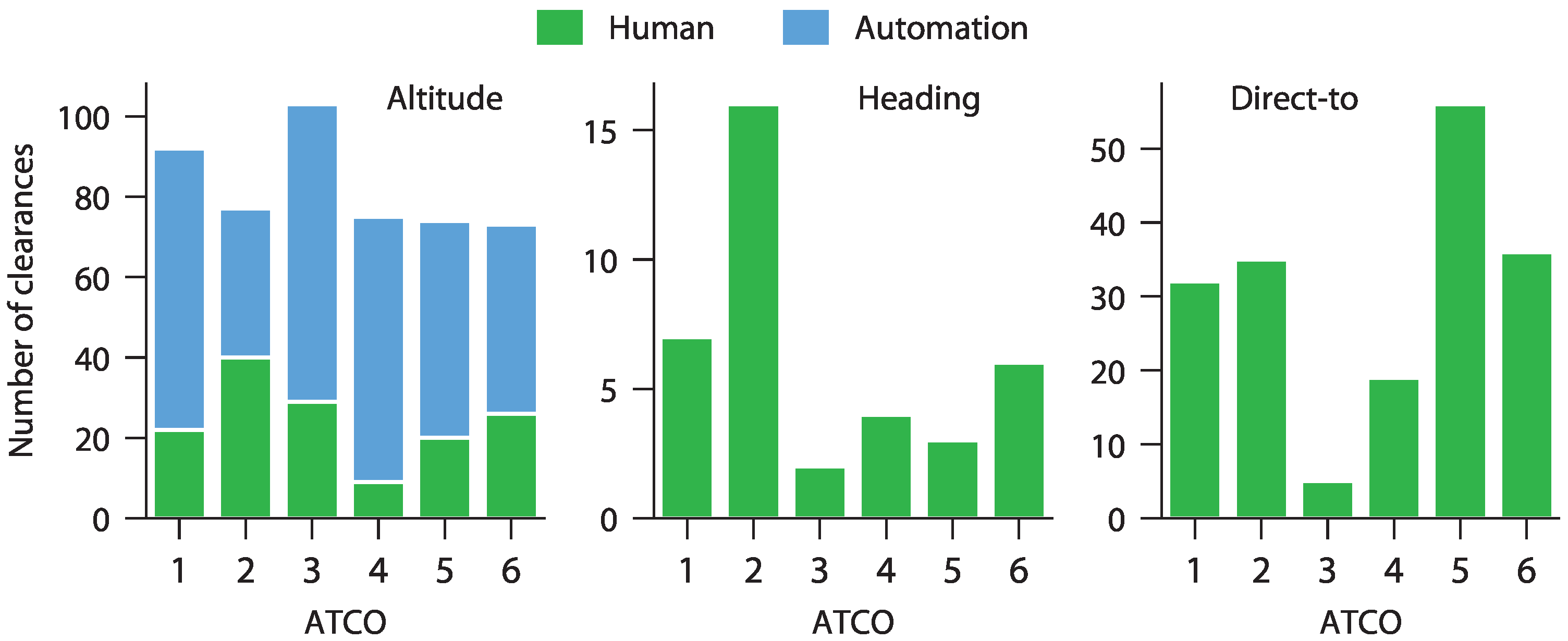
- Control activity: The number, type, and timing of issued clearances (altitude, heading, and direct-to).
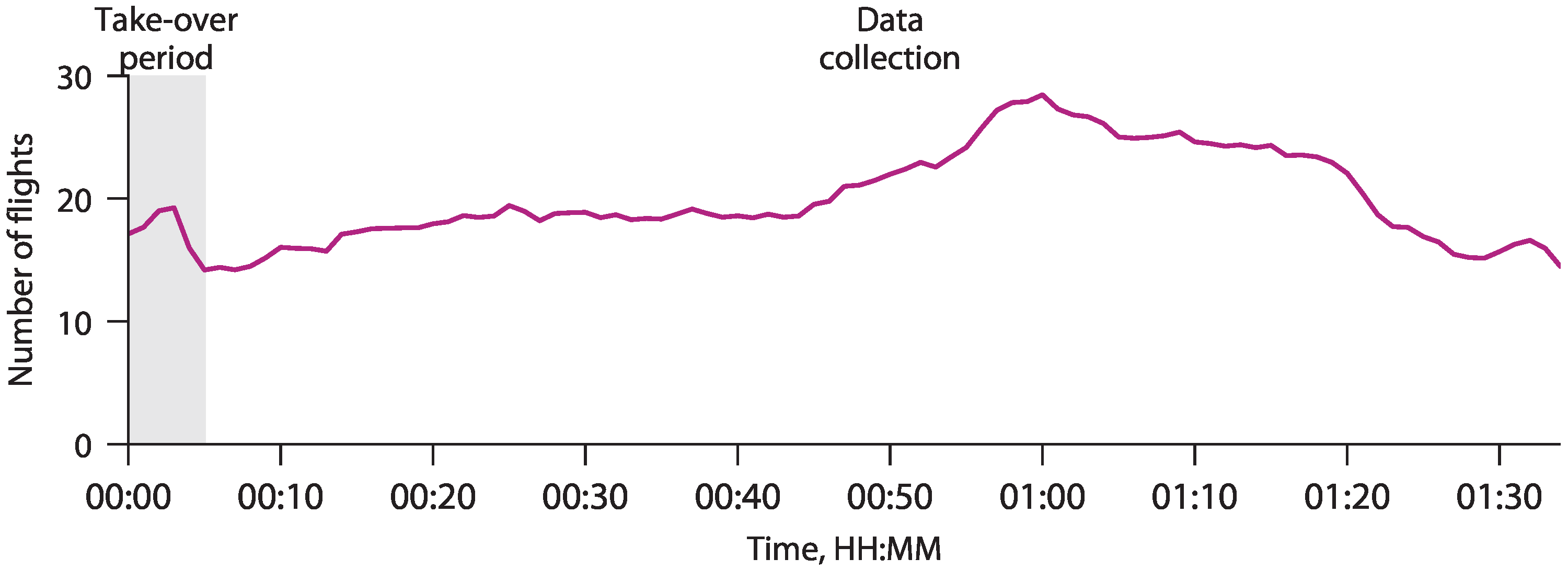
- Perceived workload: This was measured through an instantaneous self-assessed (ISA) rating on a 0–100 scale every 3 min during the experiment trials [56].
- Post-experiment questionnaire: After the experiment, the ATCOs provided their opinions on the automation, flight-based control allocation concept, and simulation in general after having worked with it during the 90 min trials.
4. Results
4.1. Pre-Experiment Questionnaire
4.2. Post-Training Questionnaire
4.3. Experiment Trial
4.3.1. Chosen Flight Allocation
4.3.2. Control Activity
4.3.3. Perceived Workload
4.4. Post-Experiment Questionnaire
4.4.1. Flight Allocation
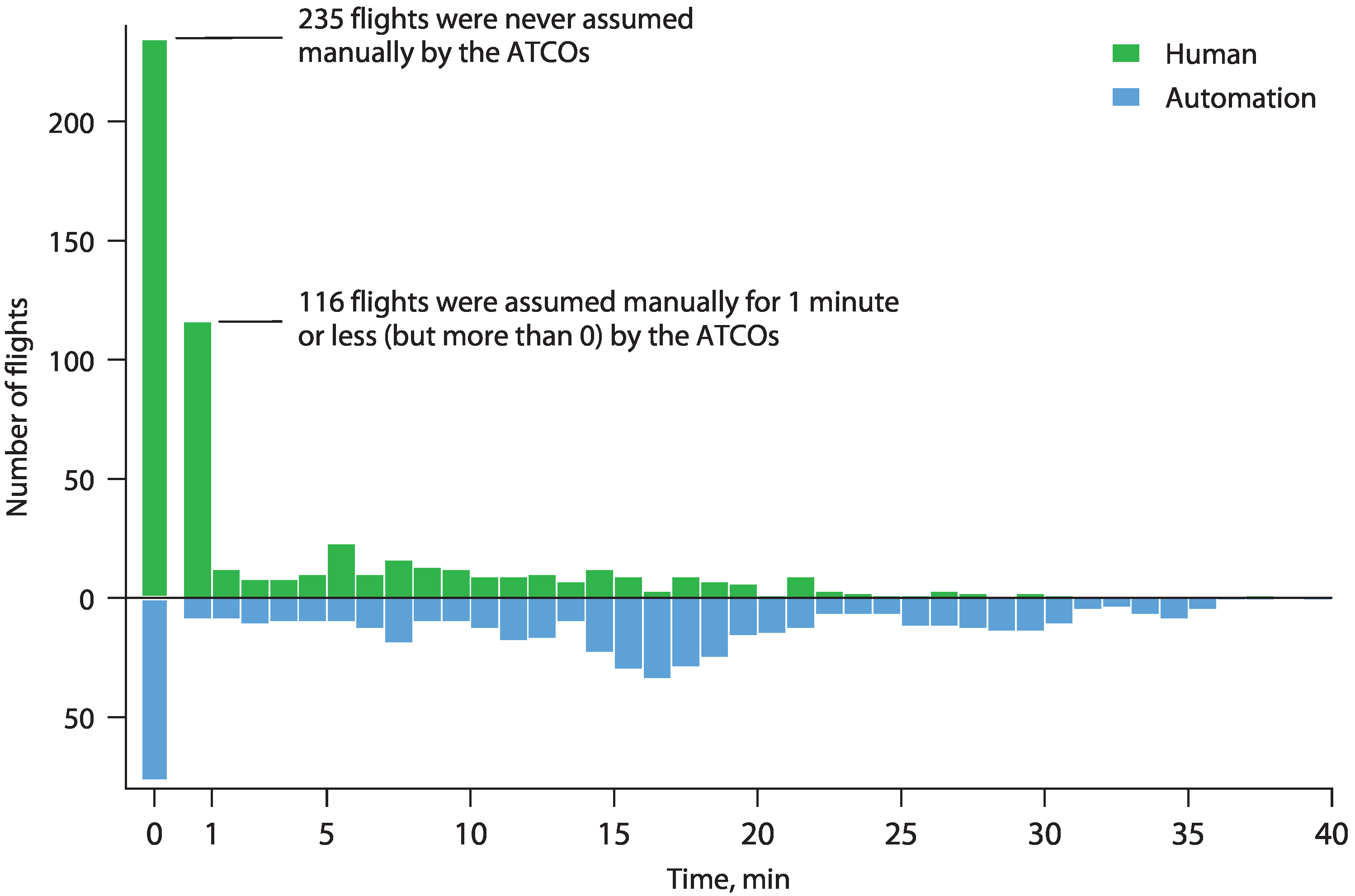
- Vertical change: The ATCOs unanimously agreed that ‘complex’ climbing/descending flights need to be handled manually (potentially with support tools). They indicated a strong preference for delegating ‘basic’ (over)flights to automation. For most ATCOs, this was also reflected in the time that they delegated such flights; 70% of the flights with identical entry and exit levels () were automated for 95% of their flight duration, versus only 50% of the flights requiring some level change. Although some ATCOs commented that a 5000 ft level change would have been a more appropriate threshold to divide traffic in basic and complex than the used 2000 ft, this was not directly reflected in their chosen allocation strategy. All traffic that had to change levels evoked more manual control than overflights, and as such could be considered at least somewhat ‘complex’. This corresponds to the allocation suggested to ATCO 2.
- Sector: Allocating flights per sector was outright rejected by three ATCOs, who commented that the choice of whether or not to delegate a flight should depend on the situation rather than the geographic sector. Two ATCOs (including ATCO 3) did see some use in it when one of the sectors was busy and/or required more concentration, while one ATCO refrained from commenting.
- Full manual or automation: Four ATCOs praised the fully manual scheme for giving them full authority over which flights to delegate to automation and when (e.g., after turning and climbing). One ATCO preferred to have overflights always proposed to automation, while the remaining ATCO simply disliked this scheme. Finally, the fully automated scheme received favorable comments from five ATCOs, provided that the automation functioned well and that the supervising ATCO could take over at any moment. One ATCO criticized it on the basis that there will always be flights that need human involvement due to their flight profile or because they pass through traffic hotspots.
4.4.2. Perceived Impact of the Automated Agent
4.4.3. Simulation Fidelity
5. Discussion and Future Work
5.1. Automation
5.2. Flight Allocation Suggestions
5.3. Feedback and Communication
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ARGOS | ATC Real Groundbreaking Operational System |
| ATC | Air Traffic Control |
| ATCO | Air Traffic Control Officer |
| CPDLC | Controller Pilot Data-Link Communications |
| FCA | Flight-Centric ATC |
| HAT | Human–Autonomy Teaming |
| ISA | Instantaneous Self-Assessment |
| LOA | Level of Automation |
| MUAC | Maastricht Upper Area Control Centre |
| NFL | Entry Flight Level |
| SESAR | Single European Sky ATM Research |
| STCA | Short-Term Conflict Alert |
| TFL | Transfer Flight Level |
| VERA | Verification and Advice Tool |
References
- SESAR Joint Undertaking. European ATM Master Plan 2020. 2020. Available online: https://op.europa.eu/en/publication-detail/-/publication/8afa1ad9-aac4-11ea-bb7a-01aa75ed71a1/language-en (accessed on 29 September 2024).
- Joint Planning and Development Office. Concept of Operations for the Next Generation Air Transportation System; Technical Report; FAA: Washington, DC, USA, 2011. [Google Scholar]
- Prevot, T.; Homola, J.R.; Martin, L.H.; Mercer, J.S.; Cabrall, C.D.D. Toward Automated Air Traffic Control—Investigating a Fundamental Paradigm Shift in Human/Systems Interaction. Int. J. Hum. Comput. Interact. 2012, 28, 77–98. [Google Scholar] [CrossRef]
- Rieth, M.; Hagemann, V. Automation as an equal team player for humans?—A view into the field and implications for research and practice. Appl. Ergon. 2022, 98, 103552. [Google Scholar] [CrossRef] [PubMed]
- Parasuraman, R.; Sheridan, T.B.; Wickens, C.D. A model for types and levels of human interaction with automation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 286–297. [Google Scholar] [CrossRef]
- Sheridan, T.B.; Verplank, W.L. Human and Computer Control of Undersea Teleoperators; Technical Report; Man-Machine Systems Laboratory, Department of Mechanical Engineering, Massachusetts Institute of Technology: Cambridge, MA, USA, 1978. [Google Scholar]
- Hancock, P.A. Automation: How much is too much? Ergonomics 2014, 57, 449–454. [Google Scholar] [CrossRef]
- Endsley, M.R. From Here to Autonomy: Lessons Learned from Human-Automation Research. Hum. Factors 2017, 59, 5–27. [Google Scholar] [CrossRef]
- Bainbridge, L. Ironies of Automation. Automatica 1983, 19, 775–779. [Google Scholar] [CrossRef]
- Strauch, B. Ironies of Automation: Still Unresolved After All These Years. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 419–433. [Google Scholar] [CrossRef]
- Ellwart, T.; Schauffel, N. Human-Autonomy Teaming in Ship Inspection: Psychological Perspectives on the Collaboration Between Humans and Self-Governing Systems. In Smart Ports and Robotic Systems; Johansson, T.M., Dalaklis, D., Fernández, J.E., Pastra, A., Lennan, M., Eds.; Palgrave Macmillan: London, UK, 2023; Chapter 18; pp. 343–362. [Google Scholar] [CrossRef]
- Lyons, J.B.; Sycara, K.; Lewis, M.; Capiola, A. Human-Autonomy Teaming: Definitions, Debates, and Directions. Front. Psychol. 2021, 12, 589585. [Google Scholar] [CrossRef]
- Korn, B.; Edinger, C.; Tittel, S.; Kügler, D.; Pütz, T.; Hassa, O.; Mohrhard, B. Sectorless ATM—A concept to increase en-route efficiency. In Proceedings of the IEEE/AIAA 28th Digital Avionics Systems Conference, Orlando, FL, USA, 25–29 October 2009. [Google Scholar] [CrossRef]
- EUROCONTROL. LORD Adds Speed and Flexibility to Decisions by Maastricht Controllers. Skyway 2024, 79, 54–56. [Google Scholar]
- Vagia, M.; Transeth, A.A.; Fjerdingen, S.A. A literature review on the levels of automation during the years. What are the different taxonomies that have been proposed? Appl. Ergon. 2016, 53, 190–202. [Google Scholar] [CrossRef]
- Kannan, R.; Lasky, R.C. Autonomous Vehicles Still Decades Away: 2019. In Proceedings of the Pan Pacific Microelectronics Symposium, Big Island, HI, USA, 10–13 February 2020. [Google Scholar] [CrossRef]
- Millot, P.; Mandiau, R. Man-Machine Cooperative Organizations: Formal and Pragmatic Implementation Methods. In Expertise and Technology: Cognition & Human-Computer Cooperation; Hoc, J.M., Cacciabue, P.C., Hollnagel, E., Eds.; Lawrence Erlbaum Associates, Inc.: Hillsdale, NJ, USA, 1995; Chapter 13; pp. 213–228. [Google Scholar]
- Hilburn, B.; Westin, C.; Borst, C. Will Controllers Accept a Machine That Thinks like They Think? The Role of Strategic Conformance in Decision Aiding Automation. Air Traffic Control Q. 2014, 22, 115–136. [Google Scholar] [CrossRef]
- Westin, C.; Borst, C.; Hilburn, B. Strategic Conformance: Overcoming Acceptance Issues of Decision Aiding Automation? IEEE Trans. Hum.-Mach. Syst. 2016, 46, 41–52. [Google Scholar] [CrossRef]
- Schutte, P.C. How to make the most of your human: Design considerations for human–machine interactions. Cogn. Technol. Work 2017, 19, 233–249. [Google Scholar] [CrossRef]
- Stayton, E.; Stilgoe, J. It’s Time to Rethink Levels of Automation for Self-Driving Vehicles [Opinion]. IEEE Technol. Soc. Mag. 2020, 39, 13–19. [Google Scholar] [CrossRef]
- Ground Vehicle Standard J3016_202104; Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. SAE International: Warrendale, PA, USA, 2021. [CrossRef]
- Pacaux-Lemoine, M.P.; Flemisch, F.O. Layers of shared and cooperative control, assistance, and automation. Cogn. Technol. Work 2019, 21, 579–591. [Google Scholar] [CrossRef]
- Chiappe, D.L.; Vu, K.P.L.; Strybel, T.Z. Situation Awareness in the NextGen Air Traffic Management System. Int. J. Hum.-Comput. Interact. 2012, 28, 140–151. [Google Scholar] [CrossRef]
- Pop, V.L.; Stearman, E.J.; Kazi, S.; Durso, F.T. Using Engagement to Negate Vigilance Decrements in the NextGen Environment. Int. J. Hum.-Comput. Interact. 2012, 28, 99–106. [Google Scholar] [CrossRef]
- Endsley, M.R.; Kiris, E.O. The Out-of-the-Loop Performance Problem and Level of Control in Automation. Hum. Factors J. Hum. Factors Ergon. Soc. 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Bekier, M.; Molesworth, B.R.C.; Williamson, A. Defining the drivers for accepting decision making automation in air traffic management. Ergonomics 2011, 54, 347–356. [Google Scholar] [CrossRef]
- Kenny, S.; Li, W.C. The Effect of the COVID-19 Pandemic on Air Traffic Controllers’ Performance: Addressing Skill Fade Concerns in Preparation for the Return to Normal Operations. In Proceedings of the International Conference on Human-Computer Interaction, Virtual, 26 June–1 July 2022; pp. 300–313. [Google Scholar] [CrossRef]
- Hoc, J.M.; Carlier, X. Role of a Common Frame of Reference in Cognitive Cooperation: Sharing Tasks between Agents in Air Traffic Control. Cogn. Technol. Work 2002, 4, 37–47. [Google Scholar] [CrossRef]
- Joe, J.C.; O’Hara, J.; Medema, H.D.; Oxstrand, J.H. Identifying requirements for effective human-automation teamwork. In Proceedings of the PSAM 2014—Probabilistic Safety Assessment and Management, Honolulu, HI, USA, 22–27 June 2014. [Google Scholar]
- Feigh, K.M.; Pritchett, A.R. Requirements for effective function allocation: A critical review. J. Cogn. Eng. Decis. Mak. 2014, 8, 23–32. [Google Scholar] [CrossRef]
- Svensson, Å.; Ohlander, U.; Lundberg, J. Design implications for teamwork in ATC. Cogn. Technol. Work 2019, 22, 409–426. [Google Scholar] [CrossRef]
- Metzger, U.; Parasuraman, R. The Role of the Air Traffic Controller in Future Air Traffic Management: An Empirical Study of Active Control Versus Passive Monitoring. Hum. Factors 2001, 43, 519–528. [Google Scholar] [CrossRef] [PubMed]
- Martin, L.H.; Bienert, N.; Claudatos, L.; Gujral, V.; Kraut, J.; Mercer, J.S. Effects of task allocation on air traffic management human-automation system performance. In Proceedings of the IEEE/AIAA 35th Digital Avionics Systems Conference, Sacramento, CA, USA, 25–29 September 2016. [Google Scholar] [CrossRef]
- Soraji, Y.; Furuta, K.; Kanno, T.; Aoyama, H.; Inoue, S.; Karikawa, D.; Takahashi, M. Cognitive model of team cooperation in en-route air traffic control. Cogn. Technol. Work 2012, 14, 93–105. [Google Scholar] [CrossRef]
- Zon, G.D.R.; Roessingh, J.J.M.; Mellett, U. Team Co-Ordination Study; Technical Report; Eurocontrol: Brussels, Belgium, 2009. [Google Scholar]
- Maynard, P.W.; Rantanen, E.M. Teams, Teamwork, and Automation in Air Traffic Control. In Proceedings of the 13th International Symposium on Aviation Psychology, Dayton, OH, USA, 18–21 April 2005; pp. 484–489. [Google Scholar]
- Corver, S.C.; Aneziris, O.N. The impact of controller support tools in enroute air traffic control on cognitive error modes: A comparative analysis in two operational environments. Saf. Sci. 2015, 71, 2–15. [Google Scholar] [CrossRef]
- Salas, E.; Sims, D.E.; Shawn Burke, C. Is there A “big five” in teamwork? Small Group Res. 2005, 36, 555–599. [Google Scholar] [CrossRef]
- Nolan, M.S. The Design of the Air Traffic Control System. In Handbook of Human Factors in Air Transportation Systems; CRC Press: Boca Raton, FL, USA, 2017; pp. 31–50. [Google Scholar] [CrossRef]
- Finck, T.; Temme, A.; Tittel, S.; Korn, B. Workload-Based Allocation Strategy for the New Concept of Flight Centric ATC. In Proceedings of the AIAA Aviation Forum and ASCEND, Las Vegas, NV, USA, 29 July–2 August 2024. [Google Scholar] [CrossRef]
- Finck, T.; Klünker, C.S.; Weber, M. Conceptual Analysis of Allocation Strategies for Air Traffic Control Concepts without Conventional Sector Boundaries. In Proceedings of the Integrated Communications, Navigation and Surveillance Conference, Herndon, VA, USA, 18–20 April 2023. [Google Scholar] [CrossRef]
- Jans, M.; Borst, C.; van Paassen, M.M.; Mulder, M. Effect of ATC Automation Transparency on Acceptance of Resolution Advisories. In Proceedings of the 14th IFAC Symposium on Analysis, Design and Evaluation of Human-Machine Systems, Tallinn, Estonia, 16–19 September 2019; pp. 353–358. [Google Scholar] [CrossRef]
- Wright, J.L.; Chen, J.Y.C.; Barnes, M.J.; Hancock, P.A. Agent Reasoning Transparency’s Effect on Operator Workload. In Proceedings of the Human Factors and Ergonomics Society 60th Annual Meeting, Washington, DC, USA, 19–23 September 2016; pp. 249–253. [Google Scholar] [CrossRef]
- Hendrickx, P.; Tisza, A.B. EUROCONTROL Maastricht Upper Area Control Centre OPS & Automation Strategy. Presentation, 2019. Available online: https://skybrary.aero/bookshelf/books/5341.pdf (accessed on 29 September 2024).
- Lanzi, P.; Taurino, D.; Contissa, G.; Sartor, G. ARGOS Legal Case: Report of Results; Technical Report; Deep Blue: Rome, Italy, 2021. [Google Scholar]
- Gerdes, I.; Jameel, M.; Hunger, R.; Christoffels, L.; Gürlük, H. The Automation Evolves: Concept for a Highly Automated Controller Working Position. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Alharasees, O.; Jazzar, A.; Kale, U.; Rohacs, D. Aviation communication: The effect of critical factors on the rate of misunderstandings. Aircr. Eng. Aerosp. Technol. 2022, 95, 379–388. [Google Scholar] [CrossRef]
- Kantsepolsky, B.; Aviv, I.; Weitzfeld, R.; Bordo, E. Exploring Quantum Sensing Potential for Systems Applications. IEEE Access 2023, 11, 31569–31582. [Google Scholar] [CrossRef]
- Haugg, E.; Poppe, M.; Herr, S.; Putz, T.; Svoboda, J.; Sosovicka, R. The usability of ADS-C EPP data for air traffic control applications. In Proceedings of the 2015 IEEE/AIAA 34th Digital Avionics Systems Conference (DASC), Prague, Czech Republic, 13–17 September 2015. [Google Scholar] [CrossRef]
- Ortner, P.; Steinhöfler, R.; Leitgeb, E.; Flühr, H. Augmented Air Traffic Control System—Artificial Intelligence as Digital Assistance System to Predict Air Traffic Conflicts. AI 2022, 3, 623–644. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Pérez-Sanz, L.; Serrano-Mira, L.; Saéz-Hernando, F.J.; Rodríguez Gauxachs, I.; Gómez-Comendador, V.F. Design of an ATC Tool for Conflict Detection Based on Machine Learning Techniques. Aerospace 2022, 9, 67. [Google Scholar] [CrossRef]
- Pham, D.T.; Tran, P.N.; Alam, S.; Duong, V.; Delahaye, D. Deep reinforcement learning based path stretch vector resolution in dense traffic with uncertainties. Transp. Res. Part C Emerg. Technol. 2022, 135, 103463. [Google Scholar] [CrossRef]
- Contissa, G.; Sartor, G.; Lanzi, P.; Marti, P.; Tomasello, P. Liabilities and automation in aviation. In Proceedings of the 2nd SESAR Innovation Days, Braunschweig, Germany, 27–29 November 2012. [Google Scholar]
- EUROCONTROL. User Manual for the Base of Aircraft Data (BADA) Revision 3.10; Technical Report; European Organisation for the Safety of Air Navigation: Brussels, Belgium, 2012. [Google Scholar]
- Tattersall, A.J.; Foord, P.S. An experimental evaluation of instantaneous self-assessment as a measure of workload. Ergonomics 1996, 39, 740–748. [Google Scholar] [CrossRef] [PubMed]
- Prandini, M.; Piroddi, L.; Puechmorel, S.; Brázdilová, S.L. Toward Air Traffic Complexity Assessment in New Generation Air Traffic Management Systems. IEEE Trans. Intell. Transp. Syst. 2011, 12, 809–818. [Google Scholar] [CrossRef]
- Prevot, T.; Lee, P.U. Trajectory-Based Complexity (TBX): A Modified Aircraft Count to Predict Sector Complexity During Trajectory-Based Operations. In Proceedings of the IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 16–20 October 2011. [Google Scholar] [CrossRef]
- de Rooij, G.; Stienstra, A.; Borst, C.; Tisza, A.B.; van Paassen, M.M.; Mulder, M. Contributing Factors to Flight-Centric Complexity in En-Route Air Traffic Control. In Proceedings of the Fifteenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2023), Savannah, GA, USA, 5–9 June 2023. [Google Scholar]
- Westin, C.; Borst, C.; Hilburn, B. Automation Transparency and Personalized Decision Support: Air Traffic Controller Interaction with a Resolution Advisory System. In Proceedings of the 13th IFAC Symposium on Analysis, Design and Evaluation of Human-Machine Systems, Kyoto, Japan, 30 August–2 September 2016; pp. 201–206. [Google Scholar] [CrossRef]
- Norman, D.A. The ‘Problem’ with Automation: Inappropriate Feedback and Interaction, not ‘Over-Automation’. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1990, 327, 585–593. [Google Scholar] [CrossRef]
- Jamieson, G.A.; Skraaning, G.; Joe, J. The B737 MAX 8 Accidents as Operational Experiences with Automation Transparency. IEEE Trans. Hum.-Mach. Syst. 2022, 52, 794–797. [Google Scholar] [CrossRef]
- Chen, J.Y.C.; Flemisch, F.O.; Lyons, J.B.; Neerincx, M.A. Guest Editorial: Agent and System Transparency. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 189–193. [Google Scholar] [CrossRef]
- van de Merwe, K.; Mallam, S.; Nazir, S. Agent Transparency, Situation Awareness, Mental Workload, and Operator Performance: A Systematic Literature Review. Hum. Factors 2024, 66, 180–208. [Google Scholar] [CrossRef]
- Springer, A.; Whittaker, S. Progressive Disclosure: When, Why, and How Do Users Want Algorithmic Transparency Information? ACM Trans. Interact. Intell. Syst. 2020, 10, 1–32. [Google Scholar] [CrossRef]
- Westin, C.; Borst, C.; van Kampen, E.J.; Monteiro, T.N.; Boonsong, S.; Hilburn, B.; Cocchioni, M.; Bonelli, S. Personalized and Transparent AI Support for ATC Conflict Detection and Resolution: An Empirical Study. In Proceedings of the 12th SESAR Innovation Days, Budapest, Hungary, 5–8 December 2022. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ATCO | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | Mean | |
| Self-reported (%) | 71 | 86 | 66 | 92 | 95 | 71 | 80 |
| Actual mean (%) | 77 (+6) | 85 (−1) | 60 (−6) | 88 (−4) | 80 (−15) | 77 (+6) | 78 (−2) |
| Actual median (%) | 79 (+8) | 86 ( = ) | 58 (−8) | 94 (+2) | 91 ( −4) | 75 (+4) | 81 (+1) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Rooij, G.; Tisza, A.B.; Borst, C. Flight-Based Control Allocation: Towards Human–Autonomy Teaming in Air Traffic Control. Aerospace 2024, 11, 919. https://doi.org/10.3390/aerospace11110919
de Rooij G, Tisza AB, Borst C. Flight-Based Control Allocation: Towards Human–Autonomy Teaming in Air Traffic Control. Aerospace. 2024; 11(11):919. https://doi.org/10.3390/aerospace11110919
Chicago/Turabian Stylede Rooij, Gijs, Adam Balint Tisza, and Clark Borst. 2024. "Flight-Based Control Allocation: Towards Human–Autonomy Teaming in Air Traffic Control" Aerospace 11, no. 11: 919. https://doi.org/10.3390/aerospace11110919
APA Stylede Rooij, G., Tisza, A. B., & Borst, C. (2024). Flight-Based Control Allocation: Towards Human–Autonomy Teaming in Air Traffic Control. Aerospace, 11(11), 919. https://doi.org/10.3390/aerospace11110919