
A Mesh-Based Approach for Computational Fluid Dynamics-Free Aerodynamic Optimisation of Complex Geometries Using Area Ruling
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background Theory
2.1. Transonic Area Rule

2.2. Evolutionary Optimisation
3. Methodology
3.1. Objective Function
- To allow direct comparison with full-fidelity CFD results using the same geometry description;
- To lend this approach to being used as the starting point in a CFD-based aerodynamic optimisation study (i.e., as a ‘cheap’, low-fidelity approach in the early stage of a design cycle).
3.2. Numerical Scheme
3.2.1. Area Computation
3.2.2. Differentiation
3.2.3. Integration
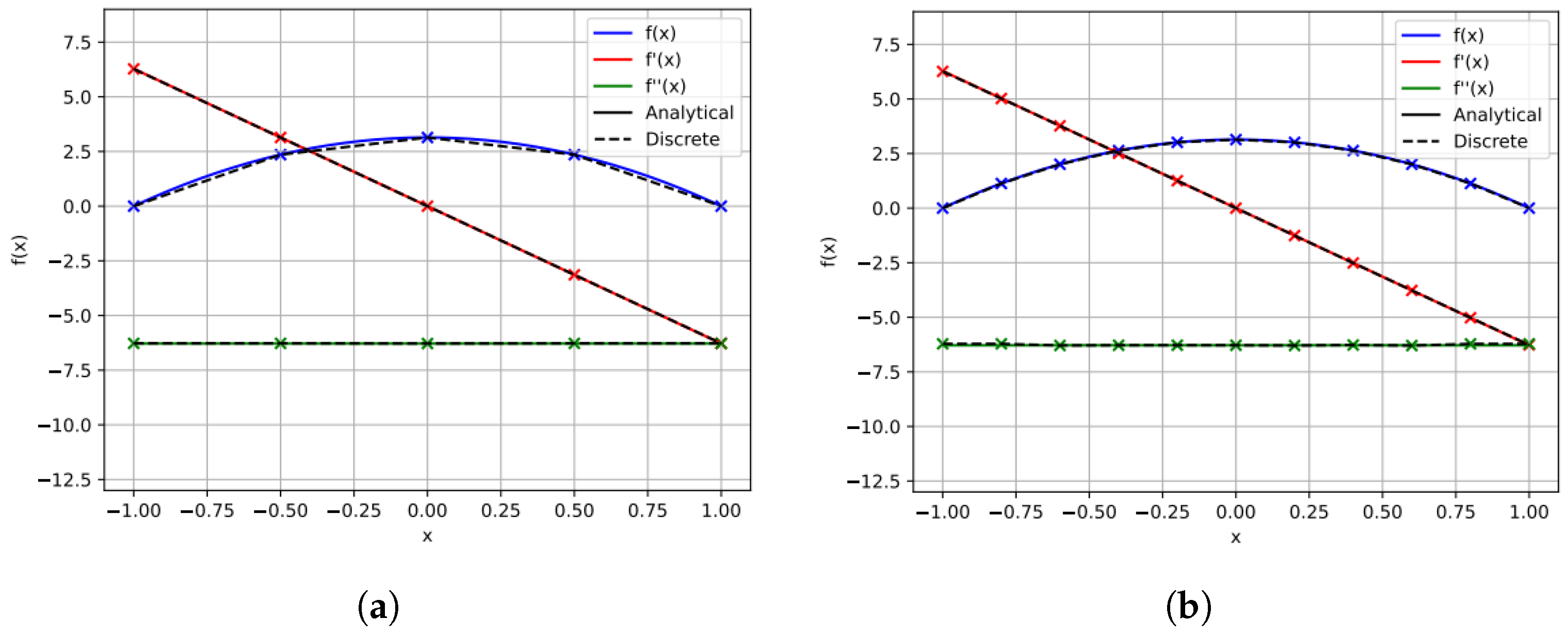
3.3. Testing the Numerical Scheme
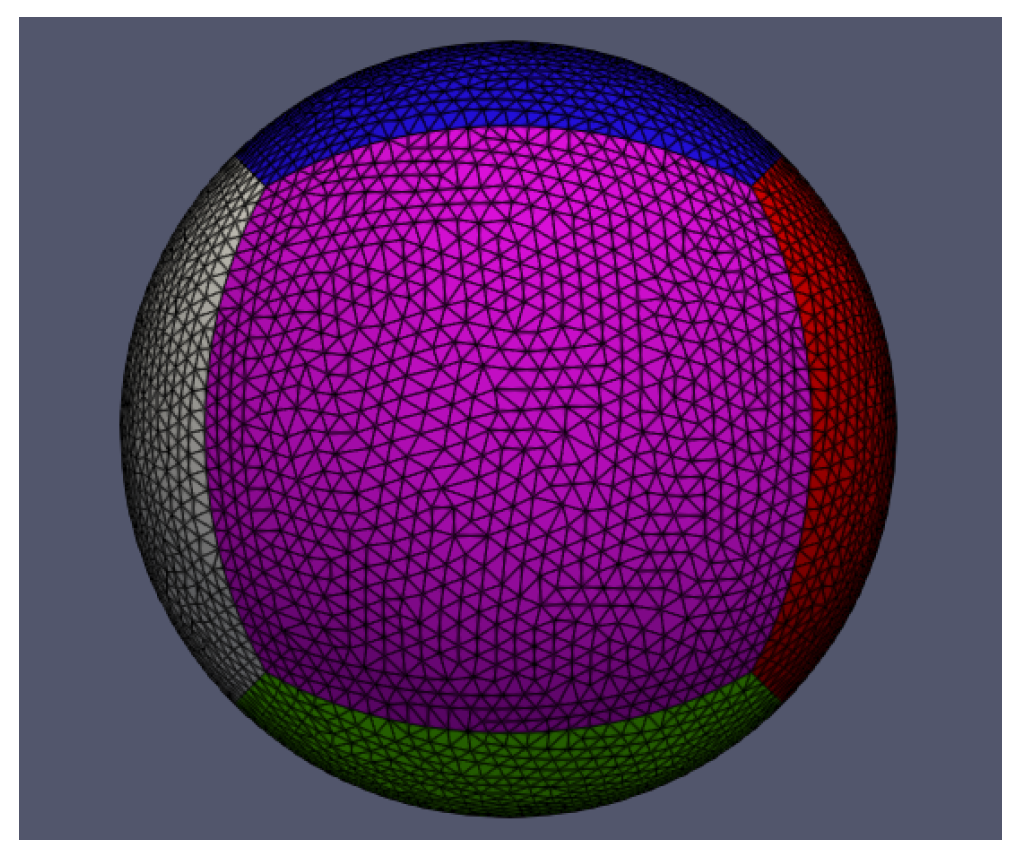
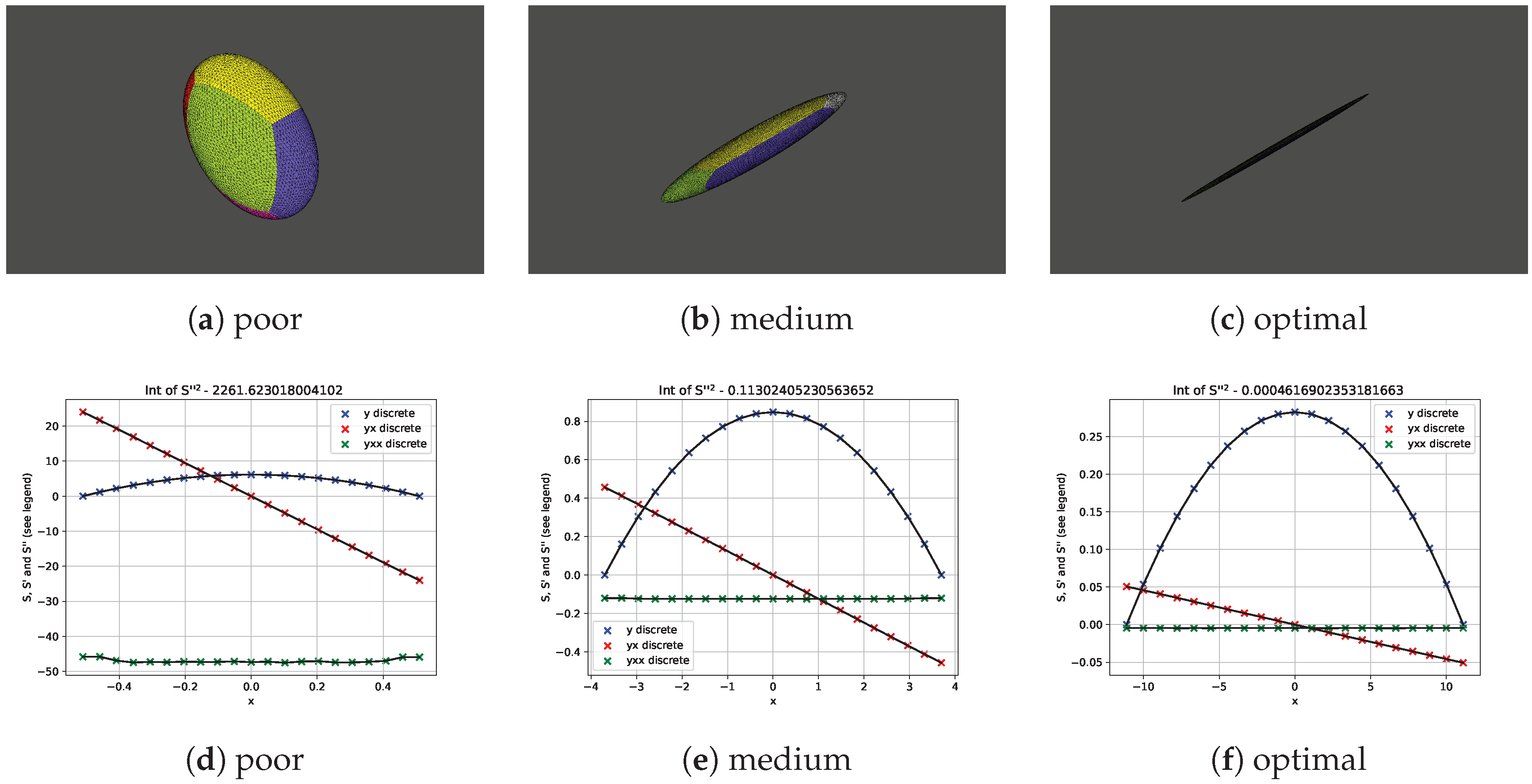
3.3.1. Sphere
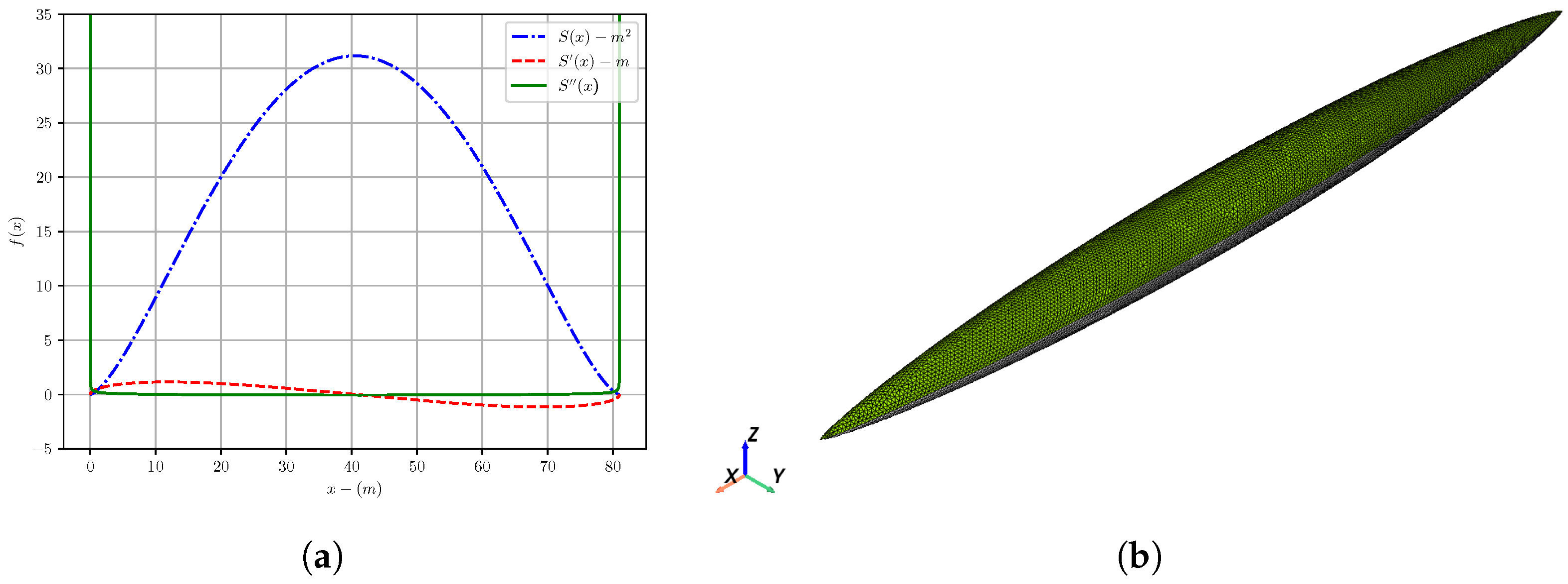
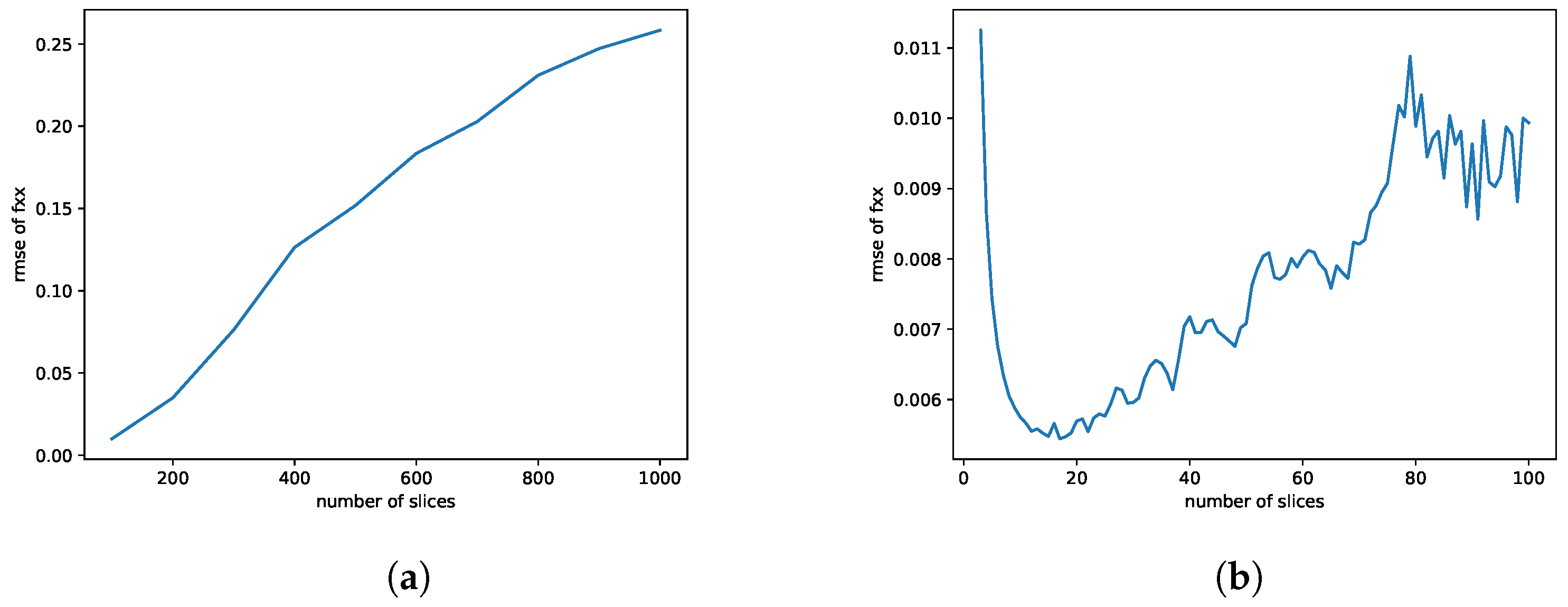
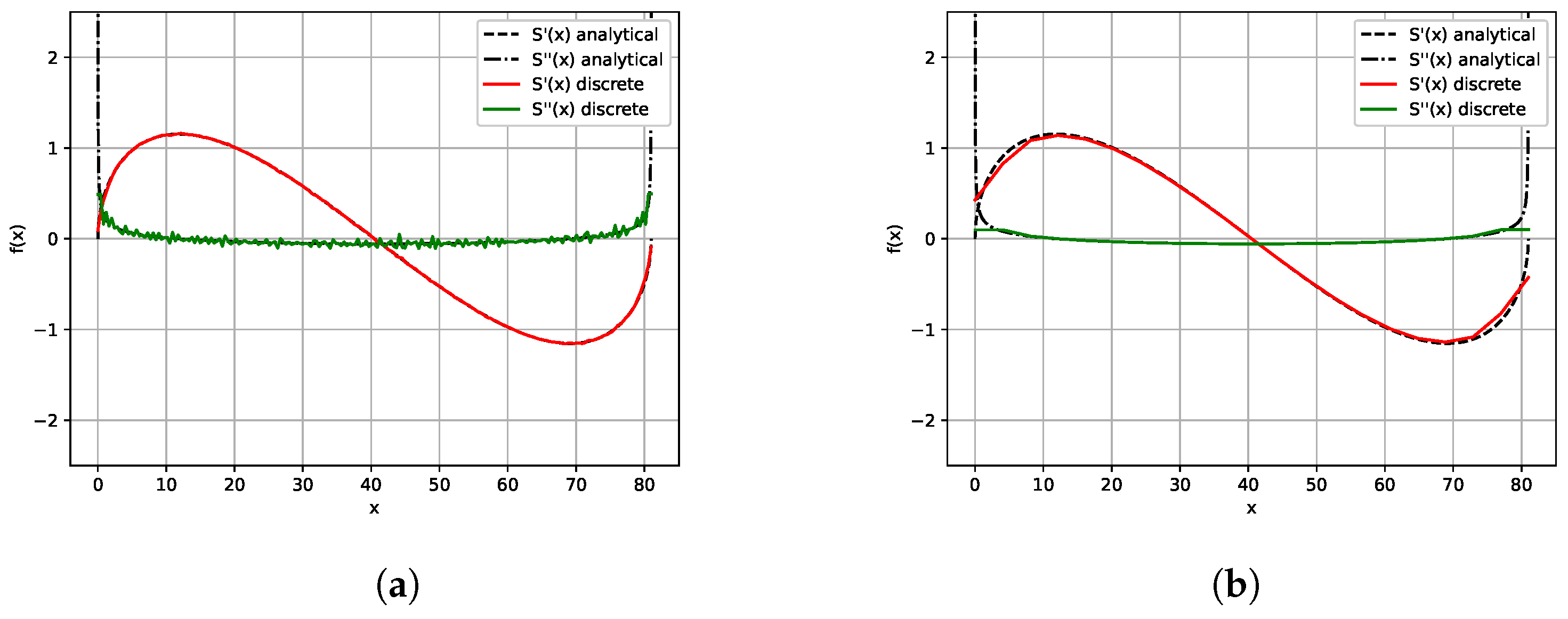
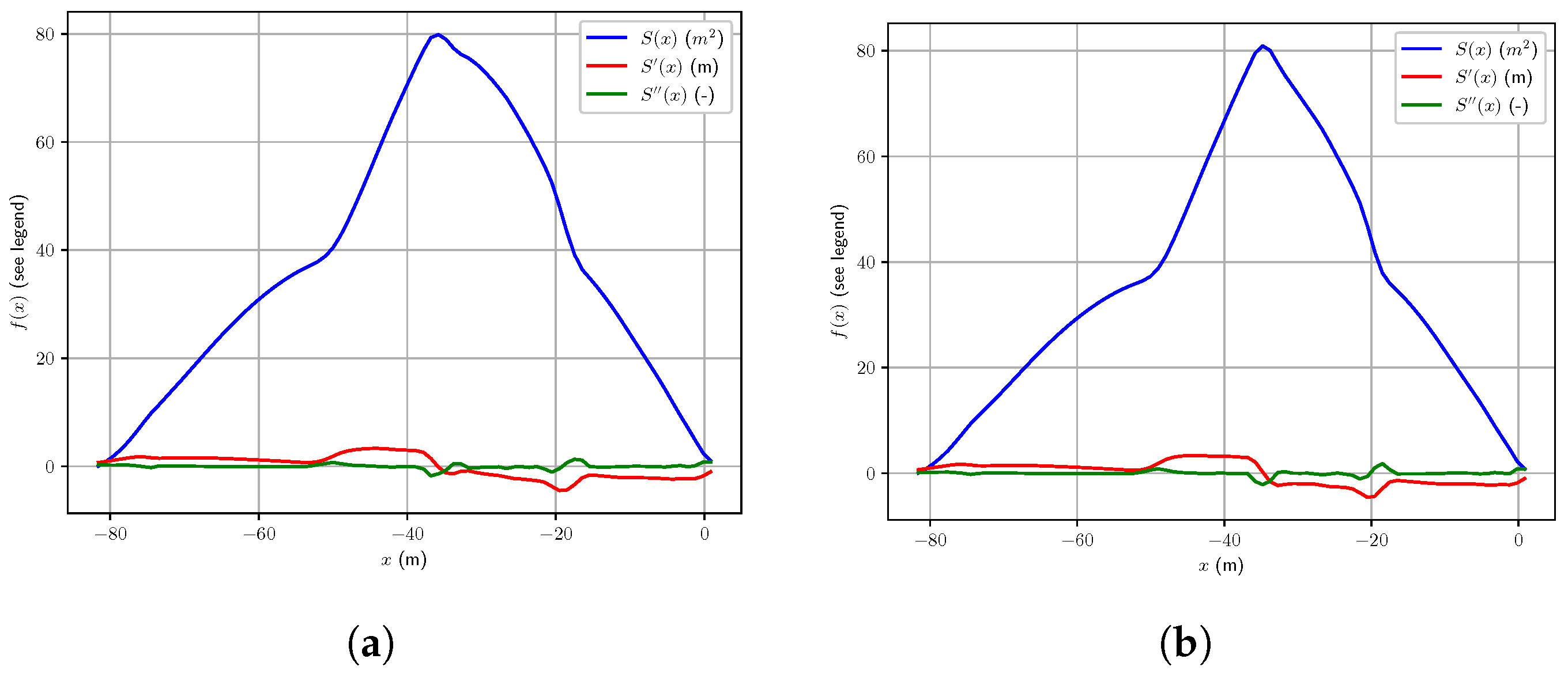
3.3.2. Sears–Haack Body
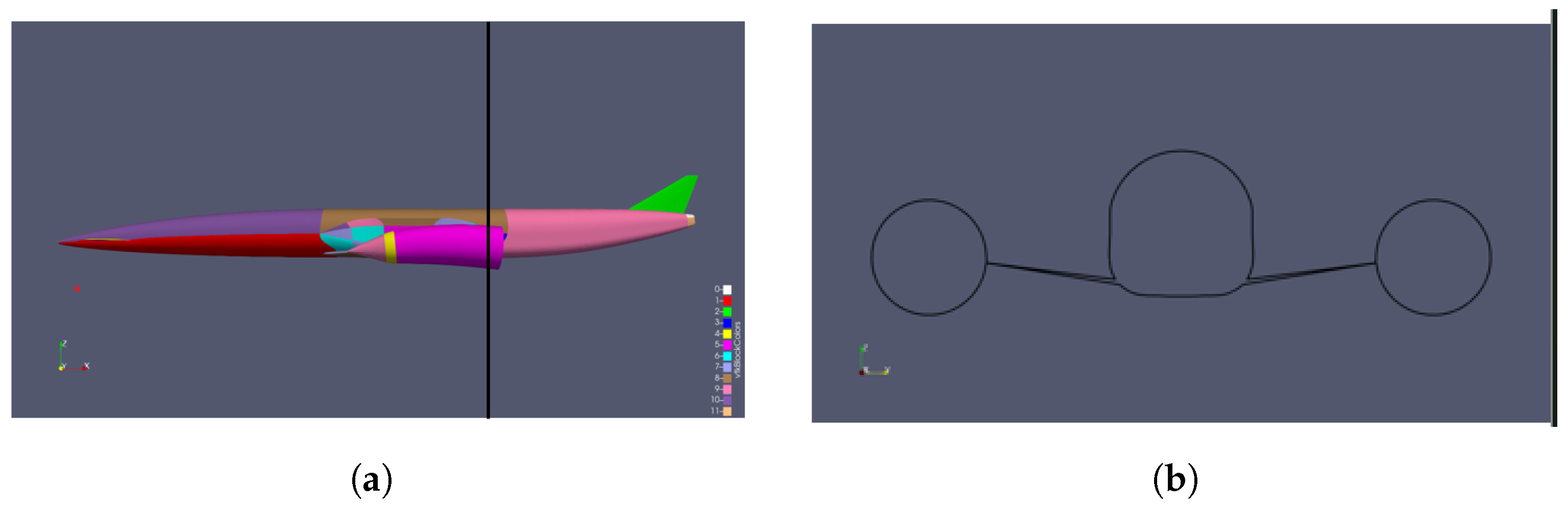
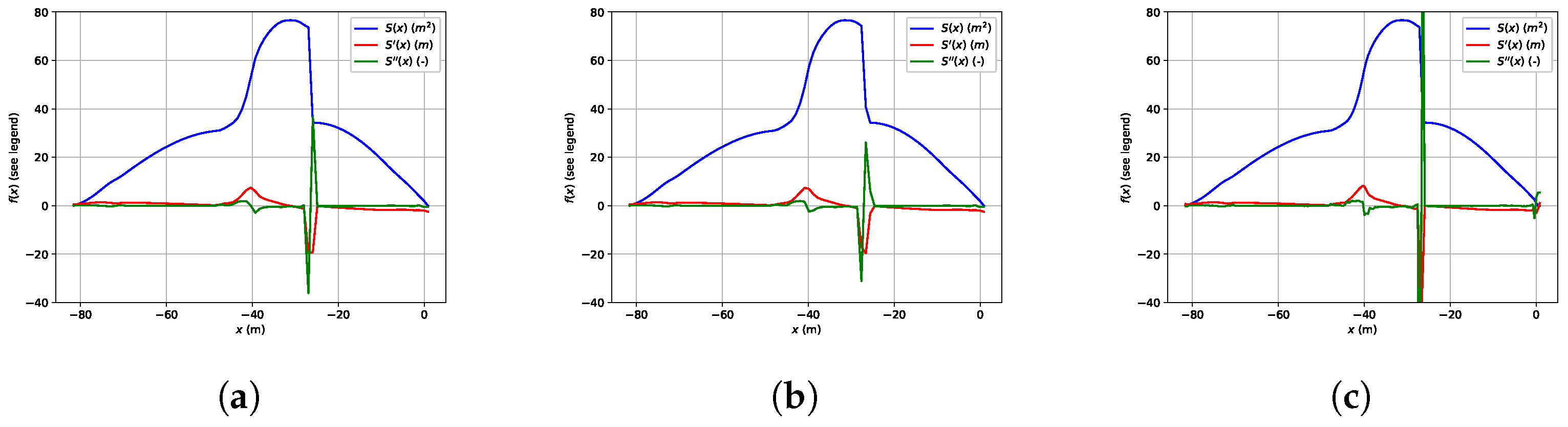
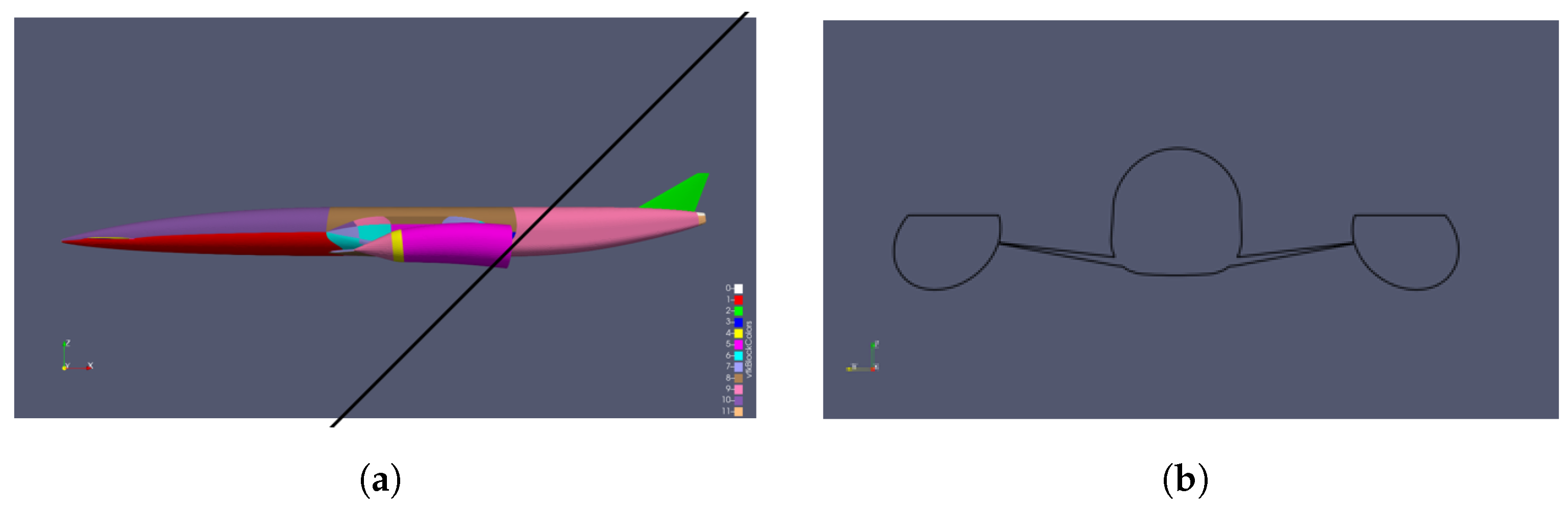
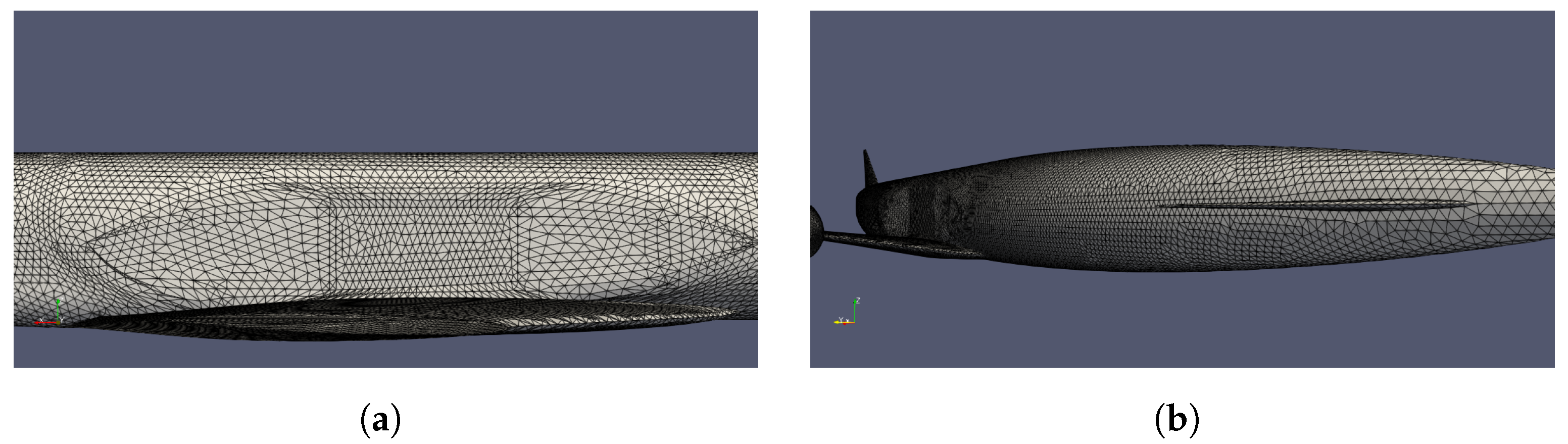
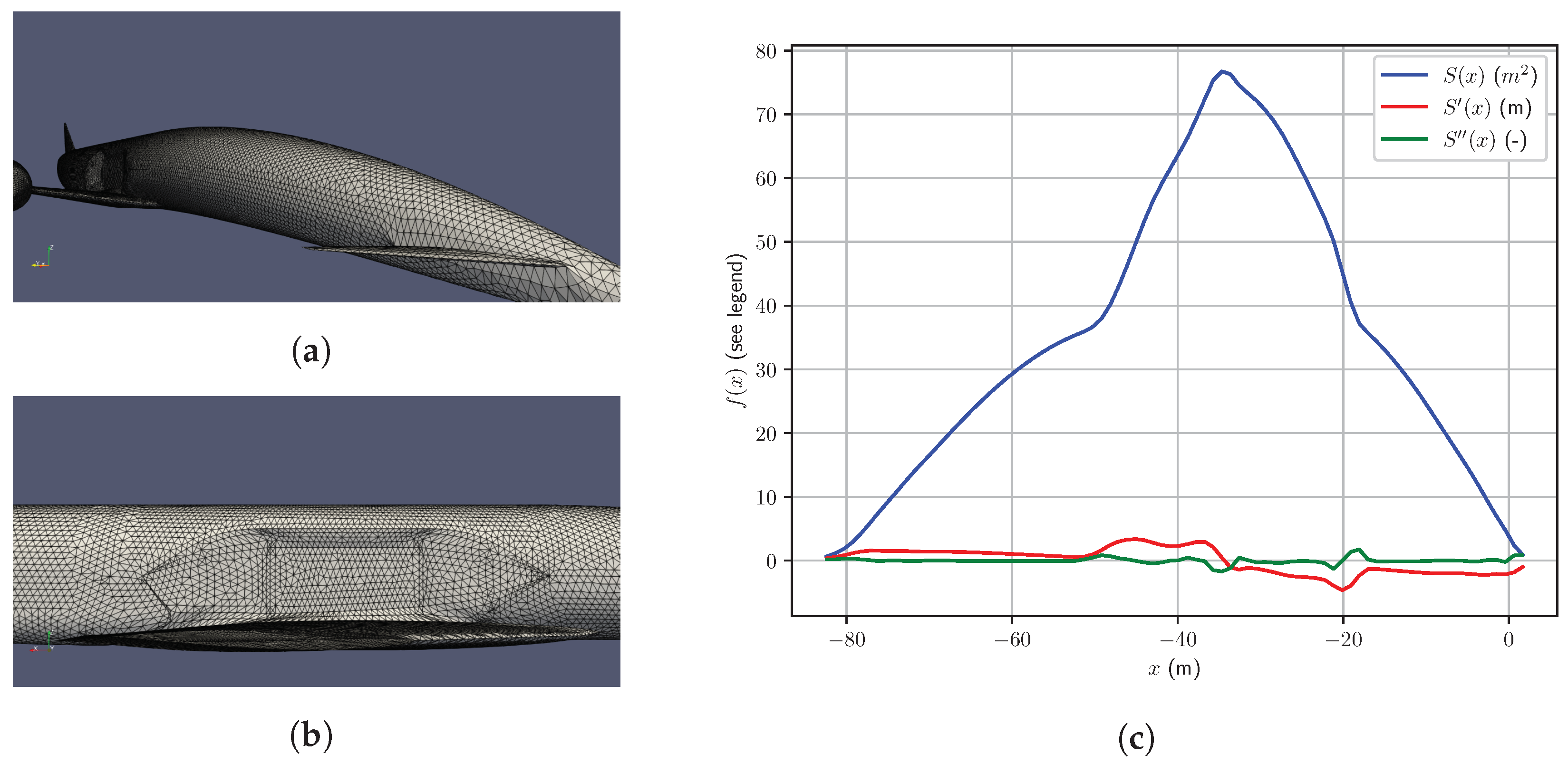
3.3.3. Complex Geometry—‘Skylon’ Spaceplane
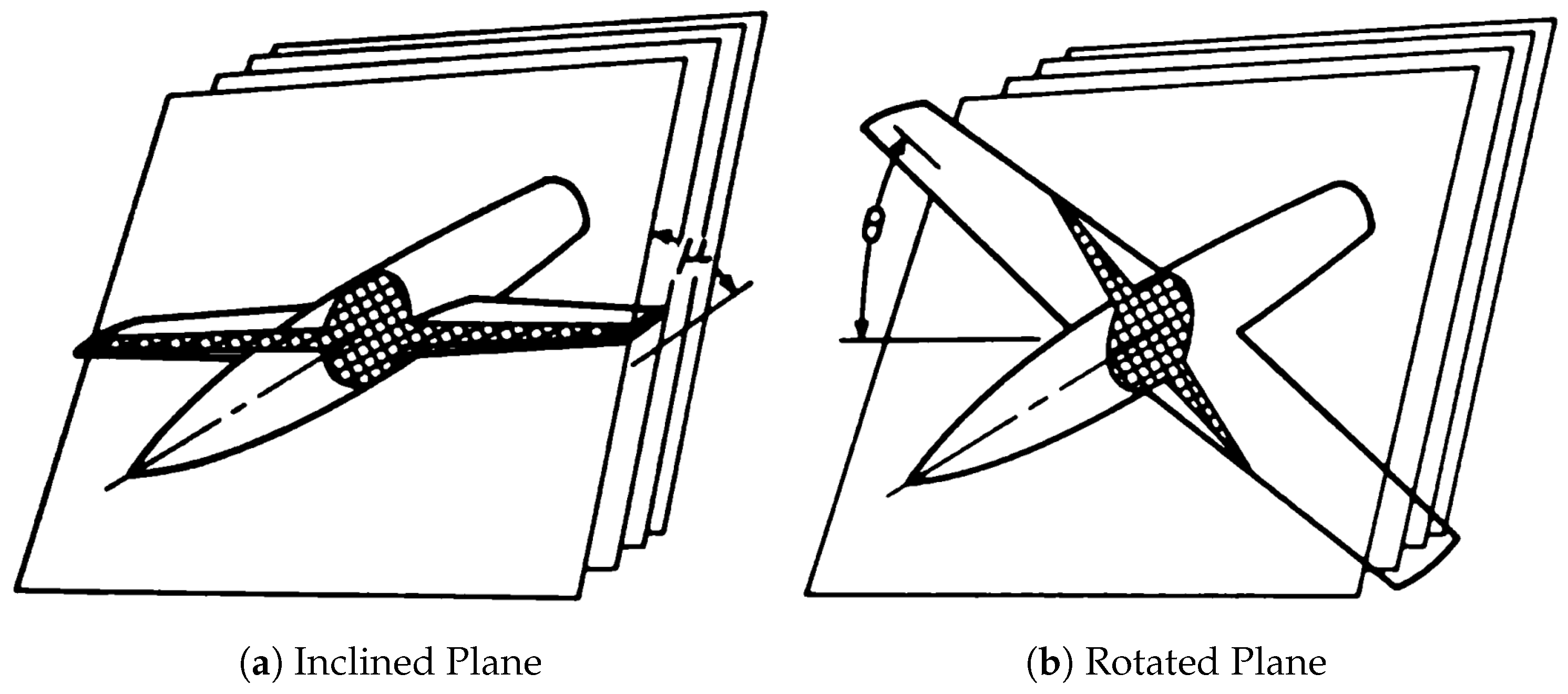
Mach Angle Inclination
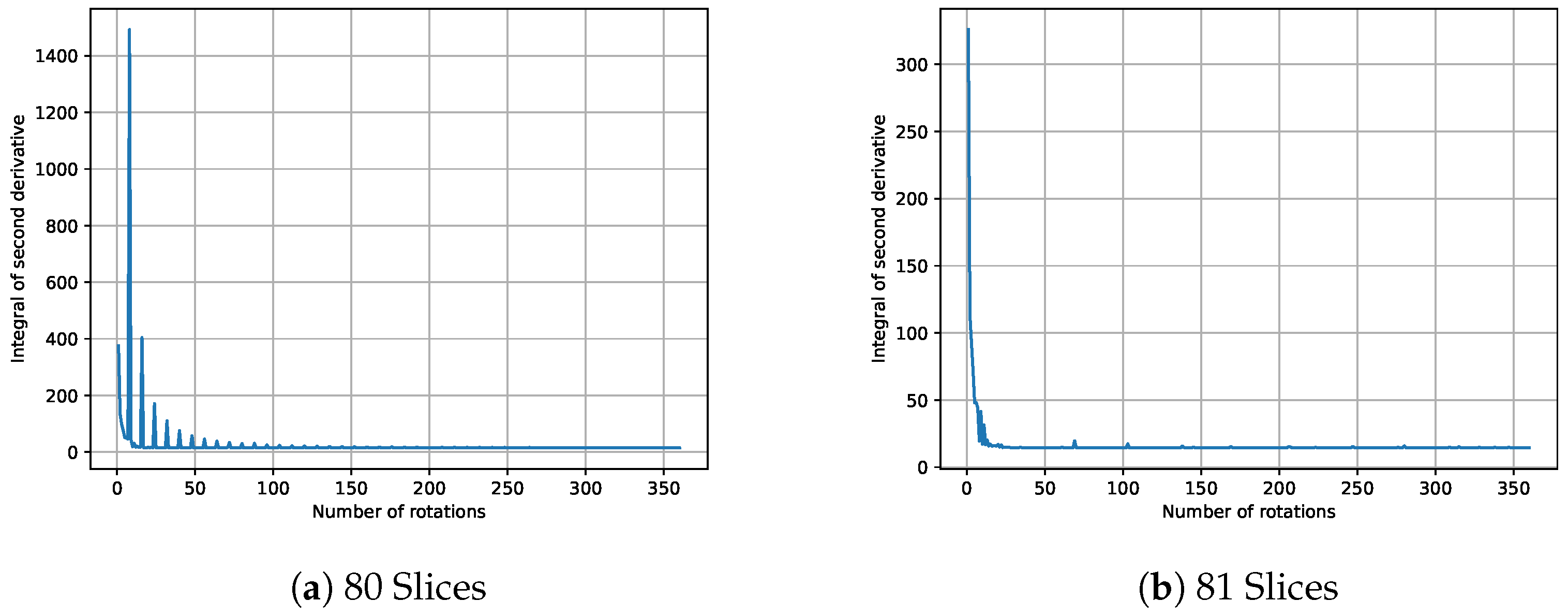
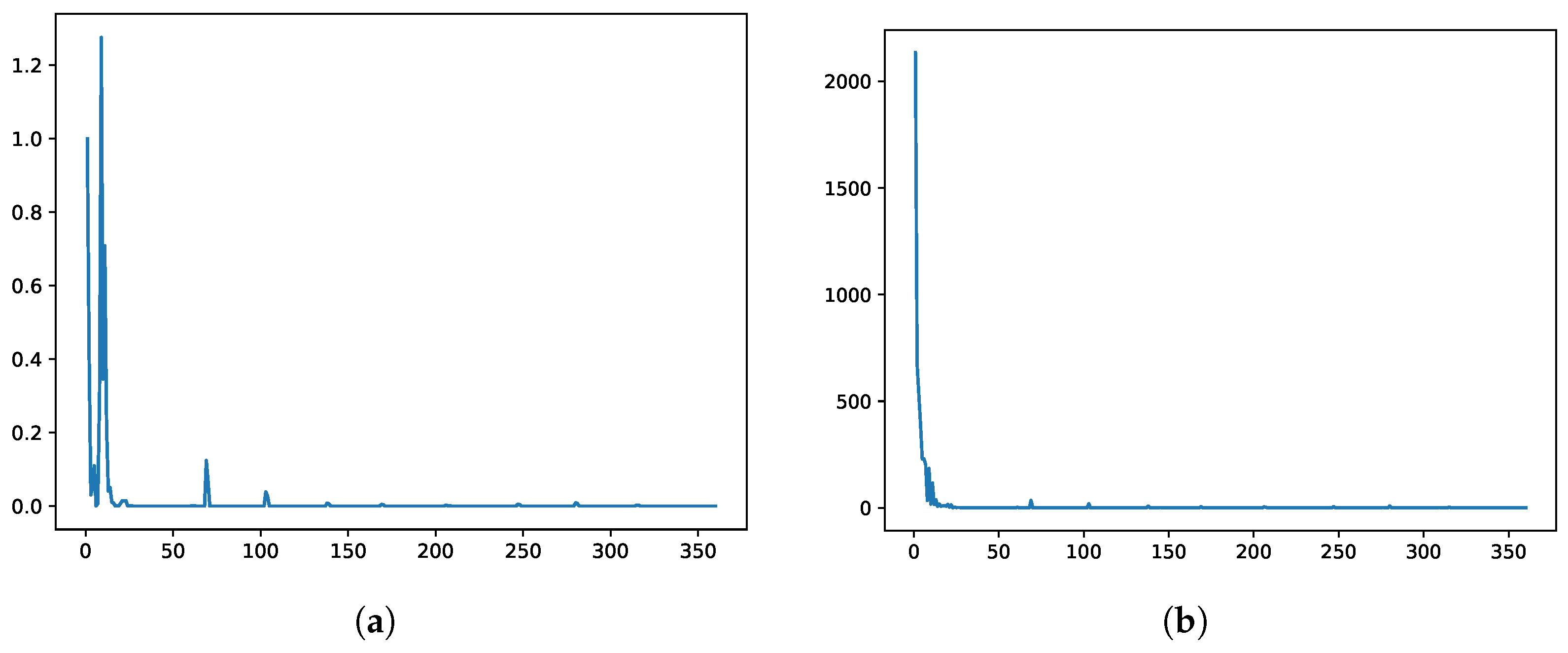
Inclination Plane Rotation
Angle of Attack
4. Optimisation Results
4.1. Simple Geometry—Sphere
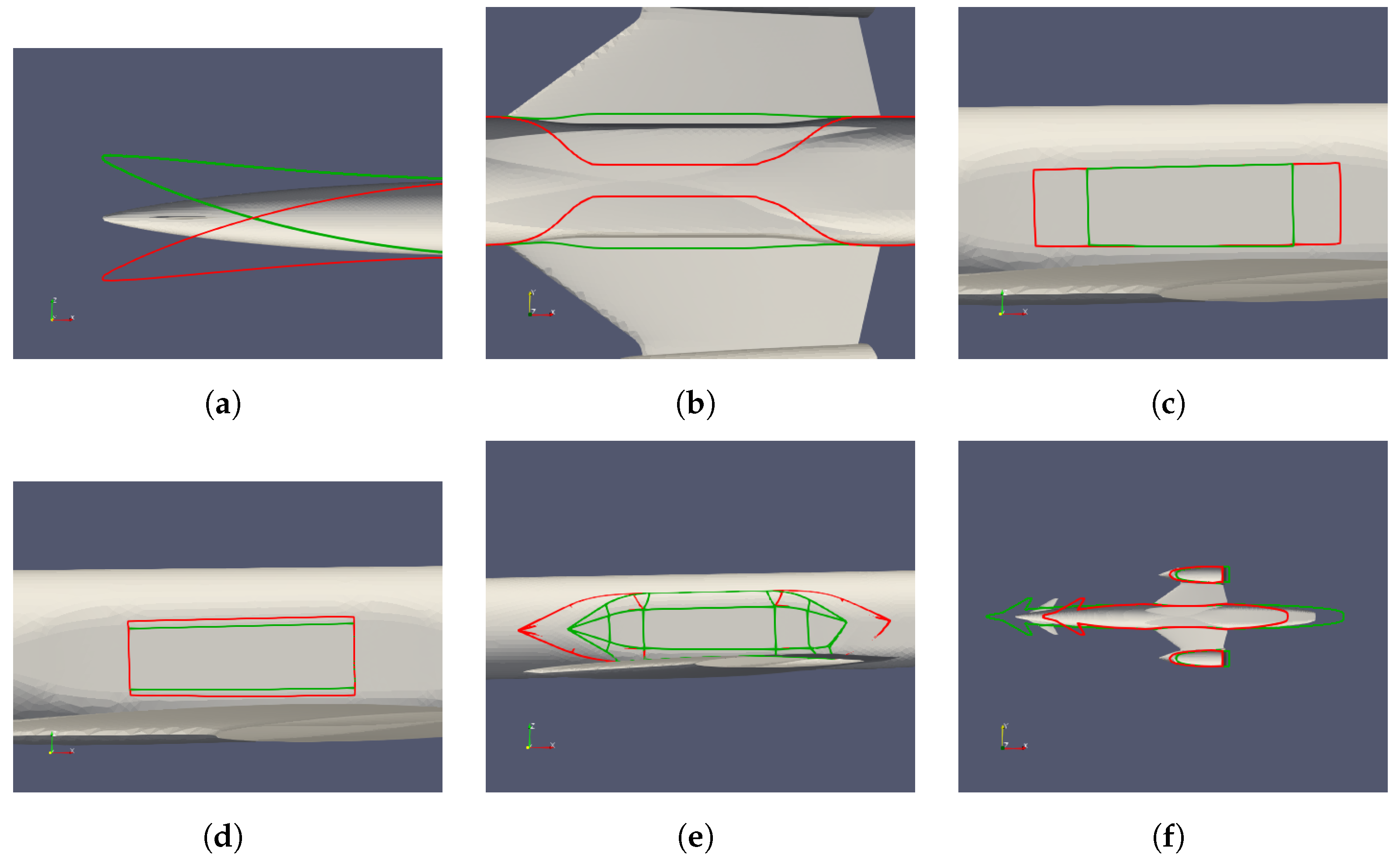
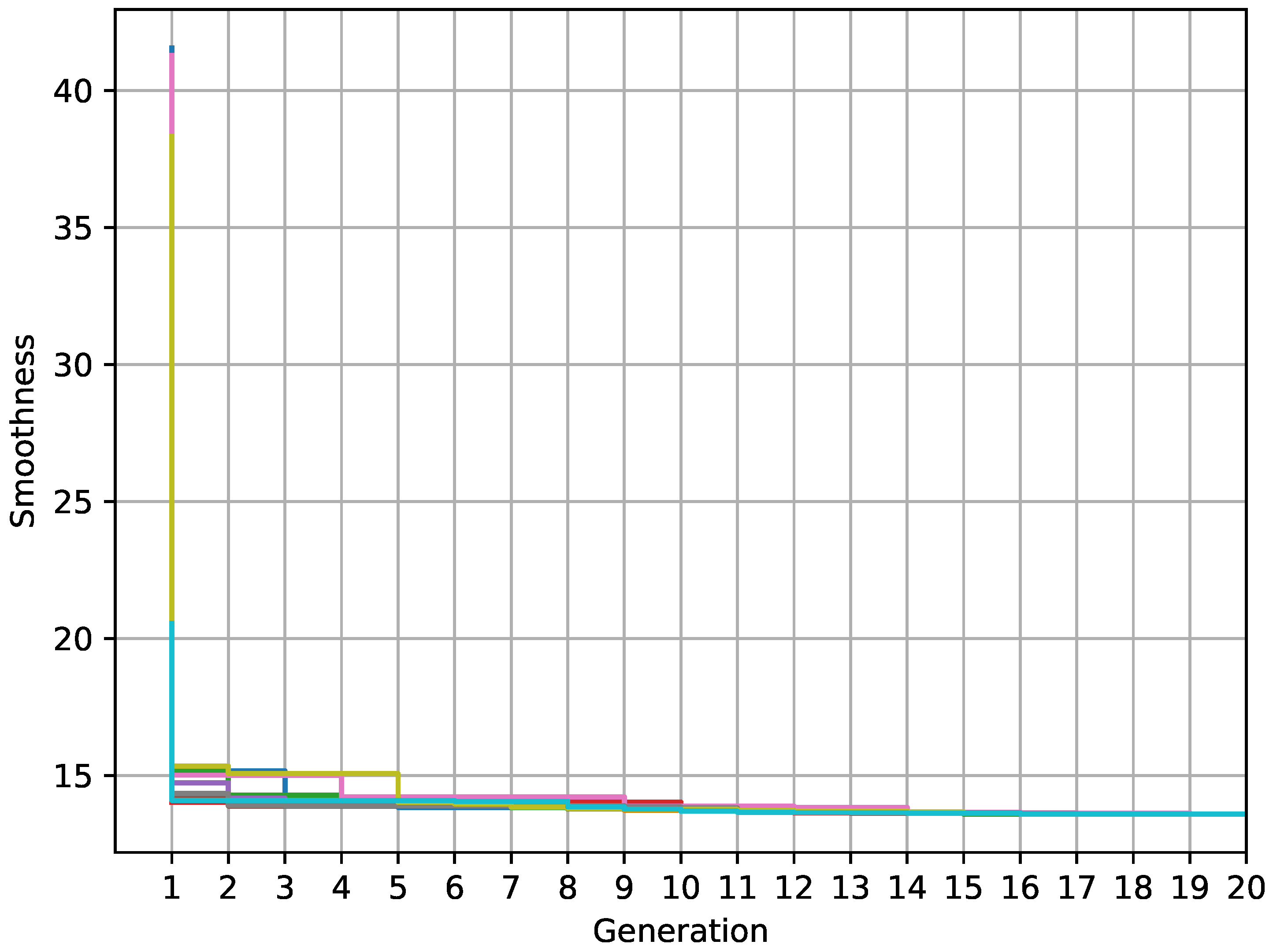
4.2. Complex Geometry—Skylon Spaceplane
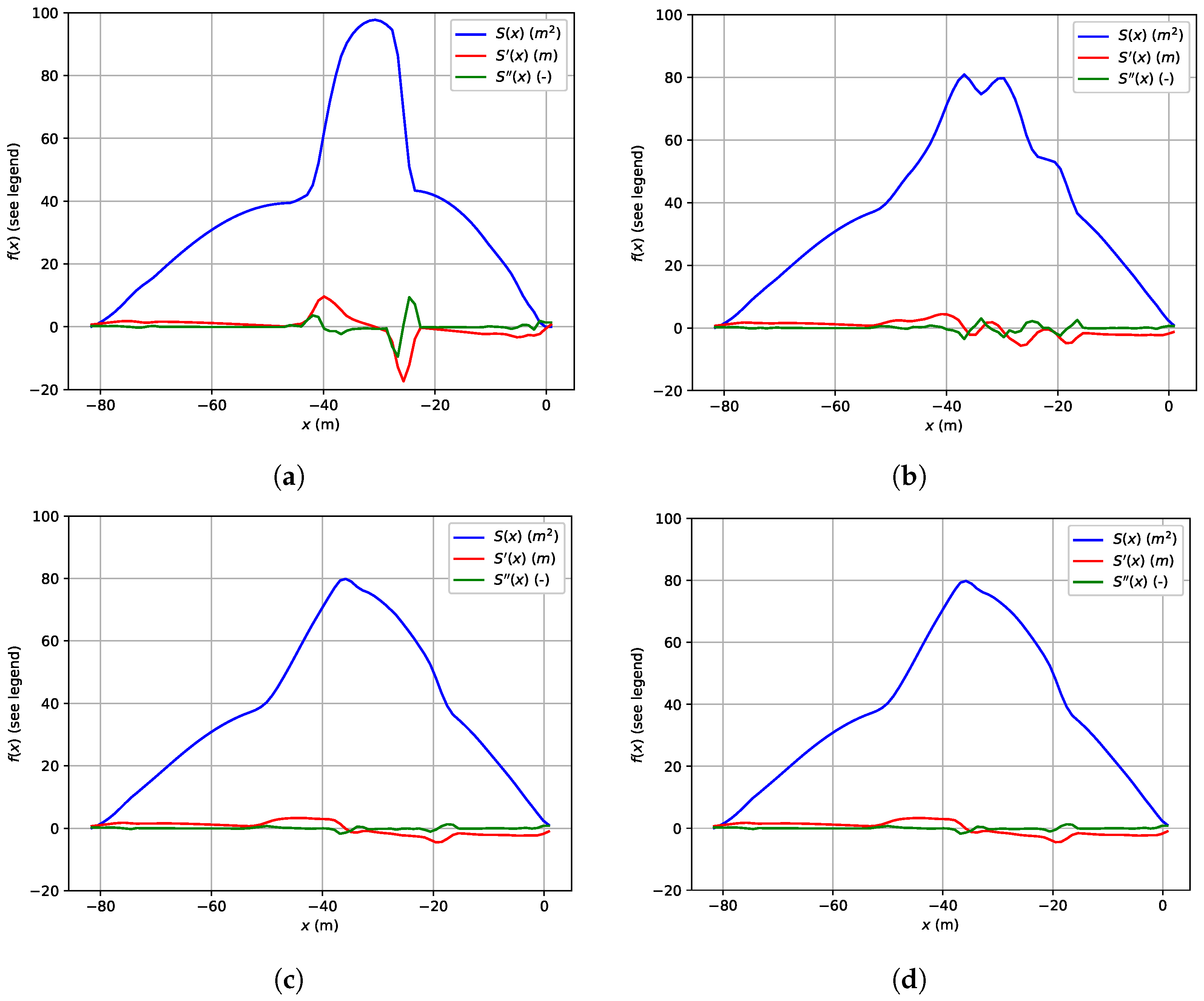
4.2.1. Direct Comparison of Area Distribution and CFD Predictions of
4.2.2. Optimisation Case 1
4.2.3. Optimisation Case 2—Changing the Angle of the Slice Plane
4.2.4. Optimisation Case 3—Averaging the Rotation of the Slice Plane
4.2.5. Angle of Attack
4.3. Optimal Design Analysis
5. Conclusions and Recommendations
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jameson, A.; Vassberg, J. Computational fluid dynamics for aerodynamic design-Its current and future impact. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001; p. 538. [Google Scholar]
- Jameson, A. Efficient aerodynamic shape optimization. In Proceedings of the 10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Albany, NY, USA, 30 August–1 September 2004; p. 4369. [Google Scholar]
- Vassberg, J.C.; Jameson, A. Aerodynamic shape optimization of a Reno race plane. Int. J. Veh. Des. 2002, 28, 318–338. [Google Scholar] [CrossRef]
- Quagliarella, D.; Vicini, A. Viscous single and multicomponent airfoil design with genetic algorithms. Finite Elem. Anal. Des. 2001, 37, 365–380. [Google Scholar] [CrossRef]
- Naumann, D.S.; Evans, B.; Walton, S.; Hassan, O. A novel implementation of computational aerodynamic shape optimisation using modified cuckoo search. Appl. Math. Modell. 2016, 40, 4543–4559. [Google Scholar] [CrossRef]
- Naumann, D.; Evans, B.; Walton, S.; Hassan, O. Discrete boundary smoothing using control node parameterisation for aerodynamic shape optimisation. Appl. Math. Modell. 2017, 48, 113–133. [Google Scholar] [CrossRef]
- Marsden, A.L.; Wang, M.; Dennis, J.E.; Moin, P. Suppression of vortex-shedding noise via derivative-free shape optimization. Phys. Fluids 2004, 16, L83–L86. [Google Scholar] [CrossRef]
- Walton, S.; Hassan, O.; Morgan, K.; Brown, M.R. Modified cuckoo search: A new gradient free optimisation algorithm. Chaos Solitons Fractals 2011, 44, 710–718. [Google Scholar] [CrossRef]
- Skinner, S.N.; Zare-Behtash, H. State-of-the-art in aerodynamic shape optimisation methods. Appl. Soft Comput. 2018, 62, 933–962. [Google Scholar] [CrossRef]
- Giannakoglou, K.C.; Papadimitriou, D.I.; Kampolis, I.C. Aerodynamic shape design using evolutionary algorithms and new gradient-assisted metamodels. Comput. Meth. Appl. Mech. Eng. 2006, 195, 6312–6329. [Google Scholar] [CrossRef]
- Periaux, J.; Lee, D.S.; Gonzalez, L.F.; Srinivas, K. Fast reconstruction of aerodynamic shapes using evolutionary algorithms and virtual nash strategies in a CFD design environment. J. Comput. Appl. Math. 2009, 232, 61–71. [Google Scholar] [CrossRef]
- Secco, N.R.; Kenway, G.K.; He, P.; Mader, C.; Martins, J.R.R.A. Efficient mesh generation and deformation for aerodynamic shape optimization. AIAA J. 2021, 59, 1151–1168. [Google Scholar] [CrossRef]
- Ahmad, N.E.; Abo-Serie, E.; Gaylard, A. Mesh optimization for ground vehicle aerodynamics. CFD Lett. 2010, 2, 54–65. [Google Scholar]
- Biancolini, M.E.; Viola, I.M.; Riotte, M. Sails trim optimisation using CFD and RBF mesh morphing. Comp. Fluids 2014, 93, 46–60. [Google Scholar] [CrossRef]
- Jones, R.T. Theory of Wing-Body Drag at Supersonic Speeds; Technical Report; NASA: Washington, DC, USA, 1956.
- Whitcomb, R.T. A Study of the Zero-Lift Drag-Rise Characteristics of Wing-Body Combinations Near the Speed of Sound; Technical Report; NASA: Washington, DC, USA, 1956.
- Smith, B.; Evans, B.; Walton, S. A Novel Mesh Morphing Methodology for Computational Aerodynamic Shape Optimisation. Under Rev. Comp. Struct. 2024, 40, 4543–4559. [Google Scholar] [CrossRef]
- Armenta, F.X.; Takahashi, T.T. Revisiting the Transonic Area Rule for Conceptual Aerodynamic Design. In Proceedings of the AIAA Aviation 2021 Forum, Virtual, 2–6 August 2021; p. 2441. [Google Scholar]
- Ashley, H.; Landahl, M.; Landahl, M.T. Aerodynamics of Wings and Bodies; Courier Corporation: North Chelmsford, MA, USA, 1965. [Google Scholar]
- Haack, W. Geschossformen kleinsten wellenwiderstandes. Ber. Lilienthal-Ges. 1941, 136, 14–28. [Google Scholar]
- Sears, W.R. On projectiles of minimum wave drag. Q. Appl. Math. 1947, 4, 361–366. [Google Scholar] [CrossRef]
- Lomax, H.; Heaslet, M.A. Recent developments in the theory of wing-body wave drag. J. Aeronaut. Sci. 1956, 23, 1061–1074. [Google Scholar] [CrossRef]
- Harris, R.V., Jr. An Analysis and Correlation of Aircraft Wave Drag; National Aeronautics and Space Administration: Washington, DC, USA, 1964.
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Bristol, UK, 2010. [Google Scholar]
- Back, T.; Hammel, U.; Schwefel, H.P. Evolutionary computation: Comments on the history and current state. IEEE Trans. Evol. Comput. 1997, 1, 3–17. [Google Scholar] [CrossRef]
- Bartz-Beielstein, T.; Branke, J.; Mehnen, J.; Mersmann, O. Evolutionary algorithms. Wiley Interdiscip. Rev. Data Min. Knowl. Discovery 2014, 4, 178–195. [Google Scholar] [CrossRef]
- Vikhar, P.A. Evolutionary algorithms: A critical review and its future prospects. In Proceedings of the 2016 International Conference on Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016; pp. 261–265. [Google Scholar]
- Alander, J.T. An Indexed Bibliography of Genetic Algorithms: Years 1957–1993; Citeseer: Princeton, NJ, USA, 1994. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Trimesh. Available online: https://github.com/mikedh/trimesh (accessed on 1 March 2024).
- Reaction Engines Ltd. Available online: https://reactionengines.co.uk/ (accessed on 1 March 2024).


























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Evans, B.J.; Smith, B.; Walton, S.P.; Taylor, N.; Dodds, M.; Zmijanovic, V. A Mesh-Based Approach for Computational Fluid Dynamics-Free Aerodynamic Optimisation of Complex Geometries Using Area Ruling. Aerospace 2024, 11, 298. https://doi.org/10.3390/aerospace11040298
Evans BJ, Smith B, Walton SP, Taylor N, Dodds M, Zmijanovic V. A Mesh-Based Approach for Computational Fluid Dynamics-Free Aerodynamic Optimisation of Complex Geometries Using Area Ruling. Aerospace. 2024; 11(4):298. https://doi.org/10.3390/aerospace11040298
Chicago/Turabian StyleEvans, Ben James, Ben Smith, Sean Peter Walton, Neil Taylor, Martin Dodds, and Vladeta Zmijanovic. 2024. "A Mesh-Based Approach for Computational Fluid Dynamics-Free Aerodynamic Optimisation of Complex Geometries Using Area Ruling" Aerospace 11, no. 4: 298. https://doi.org/10.3390/aerospace11040298