
Performance and Reliability Evaluation of Innovative High-Lift Devices for Aircraft Using Electromechanical Actuators



Abstract
1. Introduction and State of the Art
- Safety is a current limiting factor for EMAs. This methodology provides a means to preliminarily estimate the reliability of an architecture. Such estimation can provide conclusions about the feasibility of a new architecture. Furthermore, the methodology can be replicated for other systems;
- The RBD has not been used before to evaluate these architectures. This technique is supported by standards and can provide quick and meaningful estimations for preliminary reliability analysis. The main limitation lies in the estimation of the failure rates of the components. This can be solved by obtaining such values from databases or feedback from industry;
- The methodology is able to assess the impact of the EMAs when used in a real architecture, including the effect of additional components and not stopping on an actuator level. This allows the consideration of added effects and has more realistic results. This applies to both disciplines. Regarding performance, some previous analyses compared the mass of ballscrew actuators and EMAs, but no results for the whole system were provided. Regarding reliability, some studies analyzed the EMA failure rates but not the behavior of the architecture as a whole. This manuscript provides a solution for both disciplines, providing a method to assess the overall effect of the architecture as a whole.
2. Materials and Methods
2.1. Performance
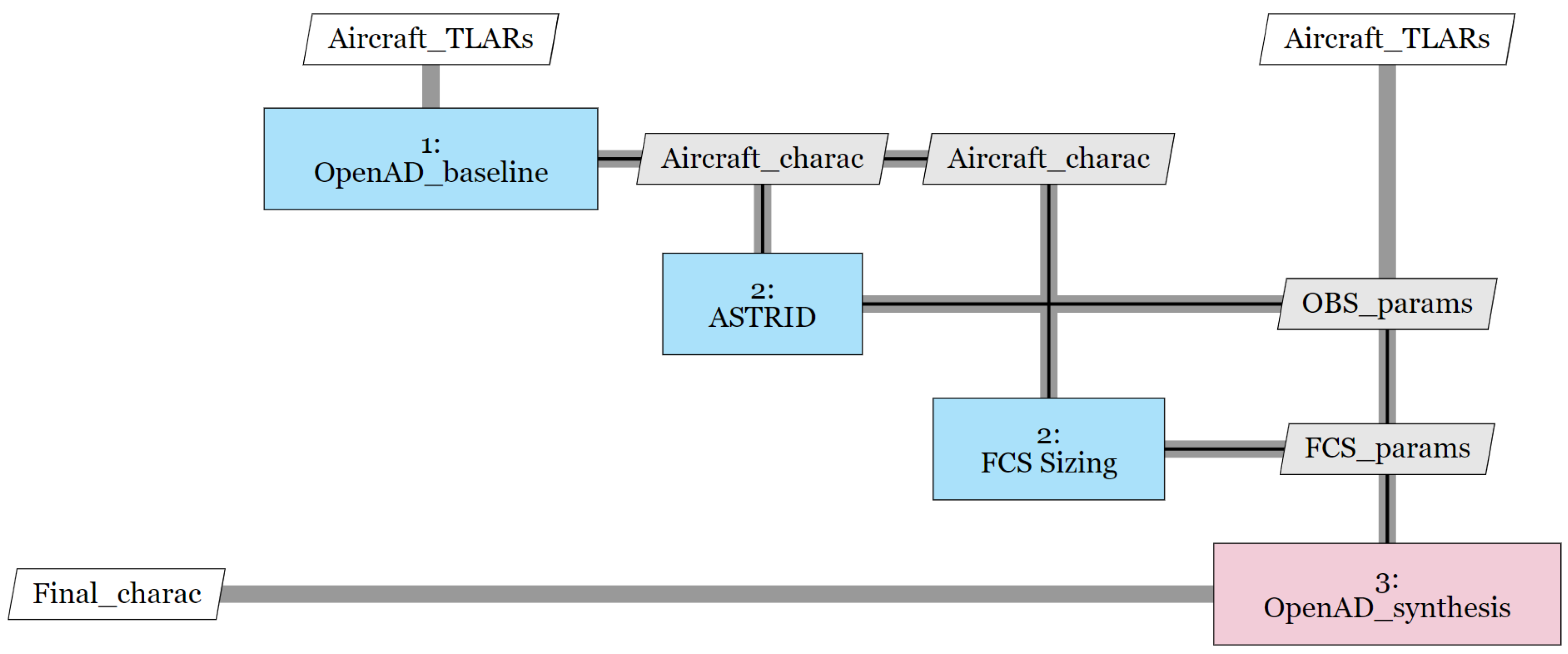
- Aircraft baseline generation: Some top-level aircraft requirements are defined, and, from them, the aircraft is preliminarily sized. This provides some estimation for the masses and geometry of the aircraft that are needed for the posterior steps (i.e., aircraft characteristics). This is performed by OpenAD, a DLR in-house tool for aircraft design [24]. This tool is explained with more details in Section 2.1.1;
- On-board systems evaluation: The systems can be designed after the preliminary sizing of the aircraft. For this, ASTRID is used [25]. It is a tool developed at Politecnico di Torino that allows the on-board systems with different levels of electrification to be sized. It provides the masses, power off-takes and bleed needed by each of the on-board systems (OBS) considering all power-consuming, power generation and power distribution systems. For more details about this tool, the reader is referred to Section 2.1.2;
- Flight control system sizing: This can be carried out with ASTRID; however, this tool does not reach the component level required for this analysis, and, consequently, a dedicated tool is developed for this subsystem. This specific tool is based on the study shown in [5], which can provide component-level estimations based on high-level information. It is further explained in Section 2.1.3. This tool is run after ASTRID and updates the results of the flight control system, specifically in terms of mass and power;
- Aircraft synthesis: Another aircraft sizing iteration is performed after the on-board systems are sized. The same top-level aircraft requirements (TLARs) are used, but new additional information is added (i.e., OBS mass, off-takes and bleed). As a consequence, a more precise and refined result is obtained, and the snowball effect is accounted for, which is explained in the results section with some examples. This analysis is again performed with OpenAD [24]. Another OBS sizing iteration could be added but does not really add value since the difference in results that is observed is minimal (less than 0.5% of variation in MTOM).
2.1.1. Overall Aircraft Design—OpenAD
2.1.2. On-Board Systems Sizing—ASTRID
2.1.3. Flight Control System Sizing
2.2. Reliability
3. Results and Discussion
3.1. Performance
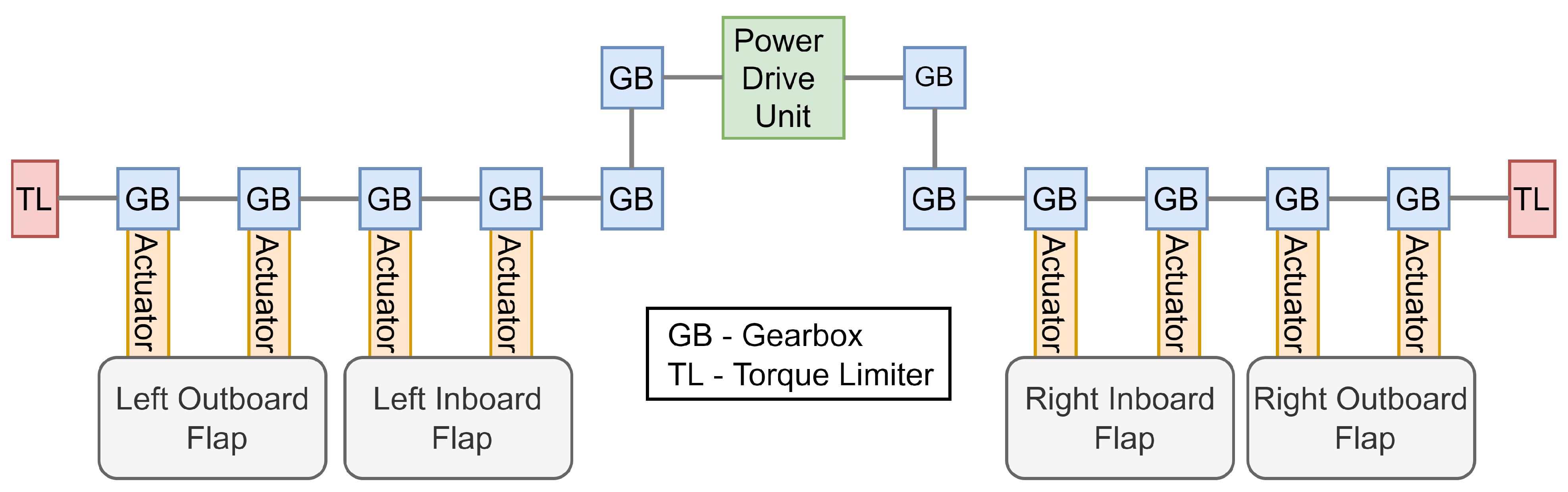
- Conventional aircraft with conventional high-lift devices: The primary control surfaces are actuated by classic hydraulic linear actuators; the flaps and slats are mechanically actuated by a central power drive unit (Figure 1) that is powered by hydraulic motors;
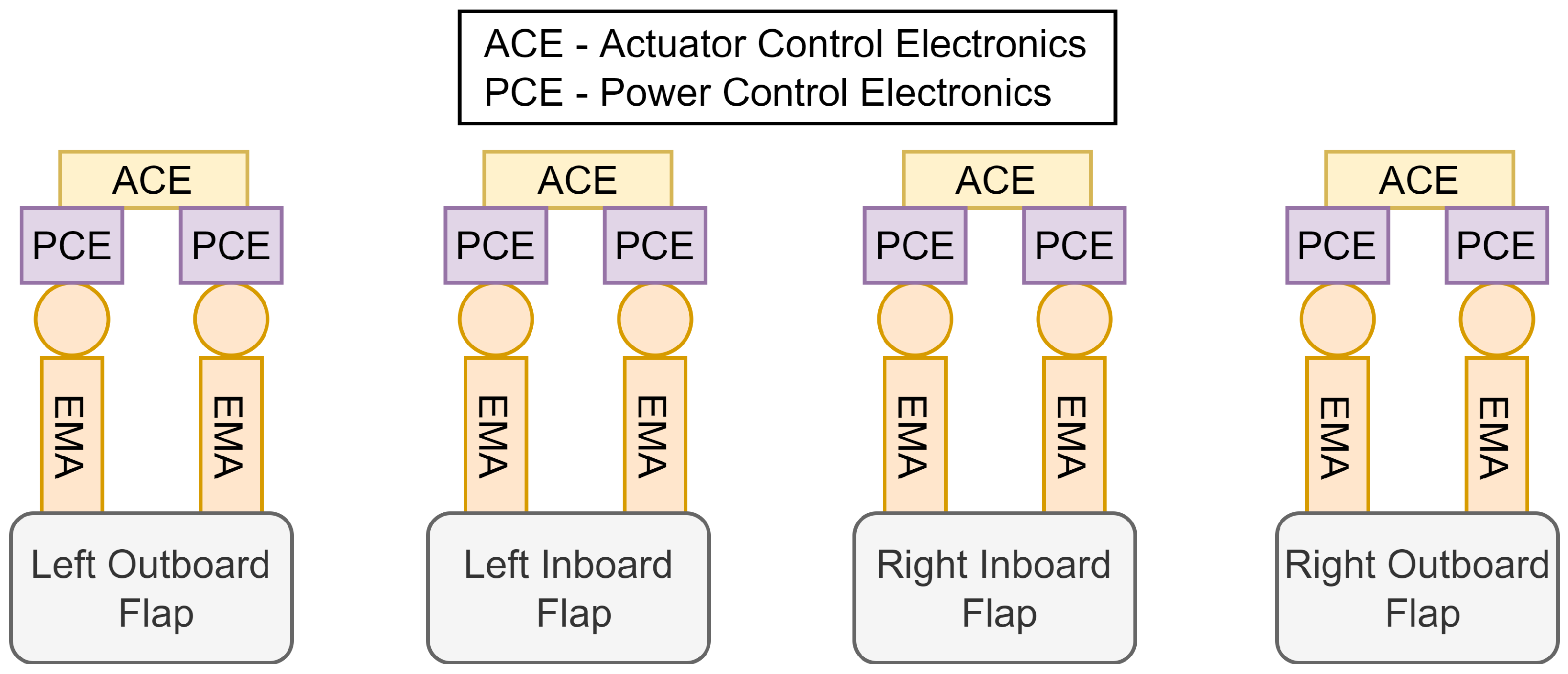
- Conventional aircraft with innovative high-lift devices: The primary control surfaces are actuated by classic hydraulic linear actuators; the flaps and slats are actuated by EMAs (Figure 2);
- All-electric aircraft with conventional high-lift devices: The primary control surfaces are actuated by electro-hydrostatic actuators (EHAs); the flaps and slats are mechanically actuated by a central power drive unit (Figure 1) that is powered by electric motors since there is no hydraulic system anymore;
- All-electric aircraft with conventional high-lift devices: The primary control surfaces are actuated by electro-hydrostatic actuators (EHAs); the flaps and slats are actuated by EMAs (Figure 2).
3.2. Reliability
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Failure rates | |
| ACE | Actuator control electronics |
| EHA | Electro-hydrostatic actuator |
| EMA | Electromechanical actuator |
| FCS | Flight control system |
| GB | Gearbox |
| MTOM | Maximum take-off mass |
| OBS | On-board systems |
| PCE | Power control electronics |
| PDU | Power drive unit |
| RBD | Reliability block diagram |
| TL | Torque limiter |
| TLARs | Top-level aircraft requirements |
References
- Moir, I.; Seabridge, A. Aircraft Systems: Mechanical, Electrical, and Avionics Subsystems Integration; John Wiley & Sons: New York, NY, USA, 2011; Volume 52. [Google Scholar]
- Cabaleiro De La Hoz, C. Environmental Control System and Flight Control System Architecture Optimization from a Family Concept Design Perspective. Master’s Thesis, Politecnico di Torino, Torino, Italy, 2020. [Google Scholar]
- Recksiek, M. Advanced high lift system architecture with distributed electrical flap actuation. In Proceedings of the 2nd International Workshop on Aircraft System Technologies, Hamburg, Germany, 26–27 March 2009; Shaker Verlag: Aachen, Germany, 2009; pp. 49–59. [Google Scholar]
- Janker, P.; Claeyssen, F.; Grohmann, B.; Christmann, M.; Lorkowski, T.; LeLetty, R.; Sosniki, O.; Pages, A. New actuators for aircraft and space applications. In Proceedings of the 11th International Conference on New Actuators, Bremen, Germany, 9–11 June 2008; pp. 9–11. [Google Scholar]
- Cabaleiro de la Hoz, C.; Fioriti, M. New methodology for flight control system sizing and hinge moment estimation. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 2375–2390. [Google Scholar] [CrossRef]
- Benarous, M.; Panella, I. Flap system power drive unit (PDU) architecture optimisation. J. Eng. 2019, 17, 3500–3504. [Google Scholar] [CrossRef]
- Belmonte, D.; Dalla Vedova, M.D.L.; Quattrocchi, G. A new active asymmetry monitoring and control technique applied to critical aircraft flap control system failures. MATEC Web Conf. EDP Sci. 2019, 304, 04011. [Google Scholar] [CrossRef]
- Lin, T.; Pecora, R.; Ciliberti, D.; Xia, W.; Hu, S. Aerodynamic optimization of an adaptive flap for next-generation green aircraft. Chin. J. Aeronaut. 2024, 37, 100–122. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Electro-Mechanical Actuators for the More Electric Aircraft; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Castellini, L.; D’Andrea, M.; Borgarelli, N. Analysis and design of a linear electro-mechanical actuator for a high lift system. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; IEEE: Paolo Alto, CA, USA, 2014; pp. 243–247. [Google Scholar]
- Fioriti, M.; Della Vecchia, P.; Donelli, G. Effect of Progressive Integration of On-Board Systems Design Discipline in an MDA Framework for Aircraft Design with Different Level of Systems Electrification. Aerospace 2022, 9, 161. [Google Scholar] [CrossRef]
- Derrien, J.C.; Sécurité, S.D. Electromechanical actuator (EMA) advanced technologies for flight controls. In Proceedings of the International Congress of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; pp. 1–10. [Google Scholar]
- Li, J.; Yu, Z.; Huang, Y.; Li, Z. A review of electromechanical actuation system for more electric aircraft. In Proceedings of the IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; IEEE: New York, NY, USA, 2016; pp. 490–497. [Google Scholar]
- Di Rito, G.; Luciano, B.; Borgarelli, N.; Nardeschi, M. Model-based condition-monitoring and jamming-tolerant control of an electro-mechanical flight actuator with differential ball screws. Actuators 2021, 10, 230. [Google Scholar] [CrossRef]
- Ciliberti, D.; Della Vecchia, P.; Memmolo, V.; Nicolosi, F.; Wortmann, G.; Ricci, F. The Enabling Technologies for a Quasi-Zero Emissions Commuter Aircraft. Aerospace 2022, 9, 319. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A review of electromechanical actuators for More/All Electric aircraft systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 4128–4151. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Previdi, F.; Scandella, M.; Pispola, G. Experimental development of a health monitoring method for electro-mechanical actuators of flight control primary surfaces in more electric aircraft. IEEE Access 2019, 7, 153618–153634. [Google Scholar] [CrossRef]
- Pang, H.; Yu, T.; Song, B. Failure mechanism analysis and reliability assessment of an aircraft slat. Eng. Fail. Anal. 2016, 60, 261–279. [Google Scholar] [CrossRef]
- Hussain, Y.M.; Burrow, S.; Henson, L.; Keogh, P. A review of techniques to mitigate jamming in electromechanical actuators for safety critical applications. Int. J. Progn. Health Manag. 2018, 9, 3. [Google Scholar] [CrossRef]
- Garcia, A.; Cusido, I.; Rosero, J.A.; Ortega, J.A.; Romeral, L. Reliable electro-mechanical actuators in aircraft. IEEE Aerosp. Electron. Syst. Mag. 2008, 23, 19–25. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Maccarana, Y.; Previdi, F.; Pispola, G.; Nardi, M.; Perni, F.; Toro, S. Development of a reliable electro-mechanical actuator for primary control surfaces in small aircrafts. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; IEEE: New York, NY, USA, 2017; pp. 1142–1147. [Google Scholar]
- Cabaleiro, C.; Fioriti, M.; Boggero, L. Methodology for the Automated Preliminary Certification of On-Board Systems Architectures through Requirements Analysis. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022; pp. 4–9. [Google Scholar]
- IEC. 61078, Analysis Techniques for Dependability-Reliability Block Diagram and Boolean Methods; IEC: Geneva, Switzerland, 2006. [Google Scholar]
- Woehler, S.; Atanasov, G.; Silberhorn, D.; Fröhler, B.; Zill, T. Preliminary aircraft design within a multidisciplinary and multifidelity design environment. In Proceedings of the Aerospace Europe Conference, Bordeaux, France, 25–28 February 2020. [Google Scholar]
- Chiesa, S.; Di Meo, G.A.; Fioriti, M.; Medici, G.; Viola, N. ASTRID-aircraft on board systems sizing and trade-off analysis in initial design. In Proceedings of the 10th Research and Education in Aircraft Design Conference, READ, Brno, Czech Republic, 17–19 October 2012; Research Bulletin/Warsaw University of Technology, Institute of Aeronautics and Applied Mechanics. Volume 1, pp. 1–28, ISSN 1425-2104. [Google Scholar]
- Page Risueño, A.; Bussemaker, J.; Ciampa, P.D.; Nagel, B. MDAx: Agile generation of collaborative MDAO workflows for complex systems. In Proceedings of the AIAA Aviation 2020 Forum, Virtual, 15–19 June 2020; p. 3133. [Google Scholar]
- Boggero, L. Design Techniques to Support Aircraft Systems Development in a Collaborative MDO Environment. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2018. [Google Scholar]
- Fioriti, M.; Di Fede, F. A Design Model for Electric Environmental Control System in Aircraft Conceptual and Preliminary Design. Int. Rev. Aerosp. Eng. 2023, 16, 58–72. [Google Scholar] [CrossRef]
- Bussemaker, J.H.; Ciampa, P.D.; Singh, J.; Fioriti, M.; Cabaleiro De La Hoz, C.; Wang, Z.; Peeters, D.; Hansmann, P.; Della Vecchia, P.; Mandorino, M. Collaborative design of a business jet family using the AGILE 4.0 MBSE environment. In Proceedings of the AIAA Aviation 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3934. [Google Scholar]
- Mandorino, M.; Della Vecchia, P.; Corcione, S.; Nicolosi, F.; Trifari, V.; Cerino, G.; Fioriti, M.; De La Hoz, C.C.; Lefebvre, T.; Charbonnier, D.; et al. Multidisciplinary design and optimization of regional jet retrofitting activity. In Proceedings of the AIAA Aviation 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3933. [Google Scholar]
- Chakraborty, I.; Mavris, D.N.; Emeneth, M.; Schneegans, A. A methodology for vehicle and mission level comparison of More Electric Aircraft subsystem solutions: Application to the flight control actuation system. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1088–1102. [Google Scholar] [CrossRef]
- Vladimirov, S.; Forde, S. Demonstration program to design, manufacture and test an autonomous electro-hydrostatic actuator to gimbal large booster-class engines. In Proceedings of the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Sacramento, CA, USA, 9–12 July 2006; p. 4364. [Google Scholar]
- Cabaleiro, C.; Fioriti, M.; Boggero, L. Automated generation of aircraft on-board system architectures and filtering through certification specification requirements. In Proceedings of the 13th EASN International Conference in Innovation in Aviation, Salerno, Italy, 5–8 September 2023. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Units | Value | Parameter | Units | Value |
|---|---|---|---|---|---|
| Max. Take-Off Mass | kg | 78,981 | Engine Model | - | PW1133 |
| Fuselage Length | m | 37.57 | Static Thrust (ISA) | kN | 147.3 |
| Wing Area | m2 | 124.78 | Seats | - | 180 |
| Wing Span | m | 35.8 | Design Cruise Mach | - | 0.78 |
| Vertical Tail Area | m2 | 22.49 | Design Range | nm | 2935 |
| Max. Lift Coefficient, Landing | - | 2.9 | Max. Lift Coefficient, Take-Off | - | 2.55 |
| Conventional [kg] | All Electric [kg] | Variation [%] | |
|---|---|---|---|
| Avionics | 781 | 781 | 0 |
| Flight Control System | 878 | 737 | −16 |
| Ice Protection System | 73 | 76 | 4.4 |
| Environmental Control System | 480 | 589 | 22.6 |
| Fuel System | 344 | 344 | 0 |
| Landing Gear | 2176 | 2320 | 6.6 |
| Fire Protection | 95 | 95 | 0 |
| Lights | 341 | 341 | 0 |
| Oxygen | 112 | 112 | 0 |
| Water Waste | 302 | 302 | 0 |
| APU | 138 | 122 | −11.7 |
| Pneumatic System | 160 | 0 | −100 |
| Hydraulic System | 1022 | 0 | −100 |
| Electrical System | 1443 | 1366 | −5.3 |
| Total | 8344 | 7184 | −13.9 |
| Conventional Aircraft with Hydraulic PDU | Conventional Aircraft with EMAs | All-Electric Aircraft with Electric PDU | All-Electric Aircraft with EMAs | |||||
|---|---|---|---|---|---|---|---|---|
| Component | Number of Instances | Mass of One Instance [kg] | Number of Instances | Mass of One Instance [kg] | Number of Instances | Mass of One Instance [kg] | Number of Instances | Mass of One Instance [kg] |
| Aileron actuator | 4 | 18.75 | 4 | 18.75 | 4 | 29.40 | 4 | 29.40 |
| Elevator actuator | 4 | 17.91 | 4 | 17.91 | 4 | 28.05 | 4 | 28.05 |
| Rudder actuator | 3 | 11.26 | 3 | 11.26 | 3 | 18.01 | 3 | 18.01 |
| Spoiler actuator | 10 | 9.66 | 10 | 9.66 | 10 | 15.45 | 10 | 15.45 |
| Total *, Primary Surfaces | - | 276.96 | - | 276.96 | - | 438.33 | - | 438.33 |
| Flap actuator | 8 | 13.28 | 8 | 23.24 | 8 | 13.28 | 8 | 23.24 |
| Flap gearbox | 8 | 12.24 | 0 | 0 | 8 | 12.24 | 0 | 0 |
| Flap corner gearbox | 4 | 13.40 | 0 | 0 | 4 | 13.40 | 0 | 0 |
| Flap torque limiter | 2 | 5.51 | 0 | 0 | 2 | 5.51 | 0 | 0 |
| Flap PDU | 1 | 55.14 | 0 | 0 | 1 | 55.14 | 0 | 0 |
| Flap shafts | 1 | 4.30 | 0 | 0 | 1 | 4.30 | 0 | 0 |
| Flap electronics | 0 | 0 | 1 | 18.59 | 0 | 0 | 1 | 18.59 |
| Total *, Flaps | - | 328.21 | - | 204.48 | - | 328.21 | - | 204.48 |
| Slat actuator | 20 | 3.36 | 20 | 6.53 | 20 | 3.36 | 20 | 6.53 |
| Slat gearbox | 20 | 6.21 | 0 | 0 | 20 | 6.21 | 0 | 0 |
| Slat corner gearbox | 2 | 6.76 | 0 | 0 | 2 | 6.76 | 0 | 0 |
| Slat torque limiter | 2 | 2.80 | 0 | 0 | 2 | 2.80 | 0 | 0 |
| Slat PDU | 1 | 27.81 | 0 | 0 | 1 | 27.81 | 0 | 0 |
| Slat shafts | 1 | 2.73 | 0 | 0 | 1 | 2.73 | 0 | 0 |
| Slat electronics | 0 | 0 | 1 | 13.06 | 0 | 0 | 1 | 13.06 |
| Total *, Slats | - | 241.17 | - | 143.69 | - | 241.17 | - | 143.69 |
| Total *, Flight Control System | - | 846.34 | - | 625.13 | - | 1007.71 | - | 786.50 |
| Conventional Aircraft with Hydraulic PDU (1) * | Conventional Aircraft with EMAs (2) * | All-Electric Aircraft with Electric PDU (3) * | All-Electric Aircraft with EMAs (4) * | |
|---|---|---|---|---|
| FCS Mass [kg] | 846.34 | 625.13 | 1007.71 | 786.50 |
| Flaps Power Max [kW] | 0 | 2.908 | 5.940 | 2.908 |
| Slats Power Max [kW] | 0 | 1.833 | 2.995 | 1.833 |
| OBS Mass [kg] | 8312 | 8091 | 7455 | 7234 |
| Bleed, Cruise [kg/s] | 0.88 | 0.88 | 0 | 0 |
| Bleed, Climb [kg/s] | 1.43 | 1.43 | 0 | 0 |
| Systems Power, Cruise [kW] | 218 | 218 | 387 | 387 |
| Systems Power, Climb [kW] | 170 | 175 | 245 | 241 |
| Systems Power, Take-Off [kW] | 59 | 64 | 147 | 143 |
| MTOM [kg] | 78,966 | 78,625 | 77,422 | 77,080 |
| Fuel Burn [kg] | 19,079 | 18,921 | 18,488 | 18,332 |
| Component | Name in Database | Failure Rates (per Hour) * |
|---|---|---|
| Ballscrew Actuator | Ballscrew Assembly | 1.274 × 10−5 |
| EMA Actuator | Actuator Electromechanical Linear | 2.335 × 10−5 |
| Gearbox | Gearbox Assembly | 2.35 × 10−7 |
| Corner Gearbox | Gearbox Assembly | 2.35 × 10−7 |
| Shaft | Shaft Assembly, Flap Drive Torque | 5.81 × 10−8 |
| Electric Motor | Motor AC | 2.39 × 10−6 |
| Electronic Devices | Computer Flight Control | 2.79 × 10−6 |
| Architecture | Conventional with Central Mechanical Shaft and PDU | Innovative with EMAs (Case without Jamming) | Innovative with EMAs (Extreme Case in Which Every Actuator Failure Causes Jamming) |
|---|---|---|---|
| Flap Probability of Failure, per hour | 1.2 × 10−6 * | 7.8 × 10−12 † | 9.2 × 10−9 § |
| Slat Probability of Failure, per hour | 7.6 × 10−7 * | 7.8 × 10−11 ¶ | 9.2 × 10−8 ¶ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cabaleiro de la Hoz, C.; Fioriti, M.; Boggero, L. Performance and Reliability Evaluation of Innovative High-Lift Devices for Aircraft Using Electromechanical Actuators. Aerospace 2024, 11, 468. https://doi.org/10.3390/aerospace11060468
Cabaleiro de la Hoz C, Fioriti M, Boggero L. Performance and Reliability Evaluation of Innovative High-Lift Devices for Aircraft Using Electromechanical Actuators. Aerospace. 2024; 11(6):468. https://doi.org/10.3390/aerospace11060468
Chicago/Turabian StyleCabaleiro de la Hoz, Carlos, Marco Fioriti, and Luca Boggero. 2024. "Performance and Reliability Evaluation of Innovative High-Lift Devices for Aircraft Using Electromechanical Actuators" Aerospace 11, no. 6: 468. https://doi.org/10.3390/aerospace11060468
APA StyleCabaleiro de la Hoz, C., Fioriti, M., & Boggero, L. (2024). Performance and Reliability Evaluation of Innovative High-Lift Devices for Aircraft Using Electromechanical Actuators. Aerospace, 11(6), 468. https://doi.org/10.3390/aerospace11060468