
The Bond Graph Modeling and Experimental Verification of a Hydraulic Inertial Vibration Isolator Including Nonlinear Effects



Abstract
:1. Introduction
2. Fluid–Structure Interaction Modeling
2.1. Mechanical Subsystem Modeling
2.2. Hydraulic Subsystem Modeling
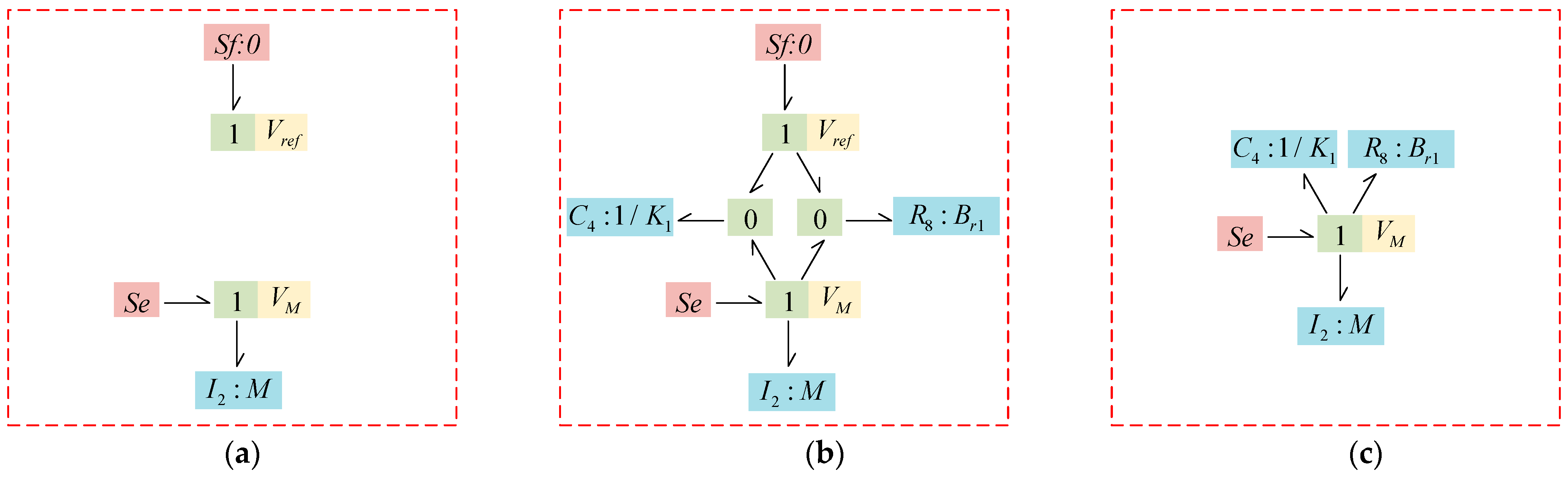
2.3. Mechanical–Hydraulic Coupling
3. Dynamic Modeling and Energy Flow Analysis
3.1. Dynamic Modeling
3.2. Identification of the Viscous Damping
3.3. Force Transmissibility Characteristics
3.4. Power and Energy Modeling
4. Numerical Simulations and Experimental Verification
4.1. Test of the Transmissibility of the Isolator
4.2. Analysis of Energy Flow and Dynamic Characteristics of the Isolator
5. Extension to Nonlinearity
6. Conclusions
- (1)
- The theoretical model of the mechanical subsystem and the fluid subsystem has been established using the bond graph method. Then, the mechanical–hydraulic coupling model is obtained by this method. The force transmissibility of the isolator is derived based on this model, and the force transmissibilities of the isolator under various parameters are calculated. The results are verified by a carefully designed experiment.The vibration transmissibility of the isolator is predicted by a dynamic model deduced from the bond graph model. Experiments are conducted to validate the model.
- (2)
- The energy transfer between the mechanical part and its inner fluid part has been computed. The results show that the attenuation between the main mechanical system to the hydraulic subsystem is much larger than that between the fluid part and the sub-mechanical part. This illustrates that the energy dissipated by the rubber ring is much larger than that of its inner fluid. Furthermore, the damping of the fluid and the metal bellow can be neglected.
- (3)
- Around the isolation frequency, the inertial mass resonates; therefore, it can be inferred that at the anti-resonance frequency, the energy is transferred to the inertial mass.
- (4)
- Due to the finite volumetric stiffness of the isolator, its amplification ratio is not constant but varies with the external excitation frequency.
- (5)
- Based on the time-domain responses of the force transmitted to the base, it was found that anti-resonance occurs when the internal fluid pressure counteracts the elastic forces transmitted to the base of the isolator.
- (6)
- Under large deformations, the nonlinear stiffness from the rubber ring significantly alters the dynamics of the isolator, which reduces the resonance and anti-resonance frequencies and broadens the vibration isolation frequency band.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rita, A.D.; Mcgarvey, J.H.; Jones, R. Helicopter Rotor Isolation Evaluation Utilizing the Dynamic Antiresonant Vibration Isolator. J. Am. Helicopter Soc. 1976, 23, 22. [Google Scholar] [CrossRef]
- Feng, Z.; Liu, C.; Li, Z.; Xing, L.; Cheng, Q. Simulation and Experiment of Dual-Frequency Isolator for Variable Speed Helicopter. Adv. Transdiscipl. Eng. 2021, 20, 380. [Google Scholar]
- Simon, F. Overview of Onera acoustic active control activities in helicopter cabin. In INTER-NOISE and NOISE-CON Congress and Conference Proceedings; Institute of Noise Control Engineering: Chiba, Japan, 2023; pp. 1881–1892. [Google Scholar]
- Deng, J.; Yang, J.; Jiao, S.; Long, X. Band-stop characteristics of a nonlinear anti-resonant vibration isolator for low-frequency applications. Int. J. Mech. Sci. 2023, 240, 107914. [Google Scholar] [CrossRef]
- Deng, J.; Zhao, J.; Yang, J.; Tian, Y.; Long, X. Design and analysis of a tunable electromagnetic lever-type anti-resonant vibration isolator. Int. J. Mech. Sci. 2024, 263, 108787. [Google Scholar] [CrossRef]
- Yan, B.; Wang, Z.; Ma, H.; Bao, H.; Wang, K.; Wu, C. A novel lever-type vibration isolator with eddy current damping. J. Sound. Vib. 2021, 494, 115862. [Google Scholar] [CrossRef]
- Yan, B.; Wang, X.; Wang, Z.; Wu, C.; Zhang, W. Enhanced lever-type vibration isolator via electromagnetic shunt damping. Int. J. Mech. Sci. 2022, 218, 107070. [Google Scholar] [CrossRef]
- Özyar, O.; Yılmaz, Ç. A self-tuning adaptive-passive lever-type vibration isolation system. J. Sound Vib. 2021, 505, 116159. [Google Scholar] [CrossRef]
- Braun, D. Development of antiresonance force isolators for helicopter vibration reduction. J. Am. Helicopter Soc. 1982, 27, 37–44. [Google Scholar] [CrossRef]
- Halwes, D.R.; Simmons, W.A. Vibration suppression system. J. Acoust. Soc. Am. 1983, 73, 1886. [Google Scholar] [CrossRef]
- Du Plooy, N.F.; Heyns, P.S.; Brennan, M.J. The development of a tunable vibration absorbing isolator. Int. J. Mech. Sci. 2005, 47, 983–997. [Google Scholar] [CrossRef]
- Liu, N.; Jin, Z.; Hua, H. A new model of a hydraulic leveraged dynamic anti-resonance vibration isolator under base excitation: A theoretical and experimental study. J. Vib. Control 2019, 25, 2282–2292. [Google Scholar] [CrossRef]
- Teng, H.D.; Gao, X. The dynamic properties and performance of the bellows-type hydraulic inerter-based dynamic anti-resonance vibration isolator. J. Vib. Control 2024, 180920679. [Google Scholar] [CrossRef]
- Duan, N.; Yu, H.; Zhang, Z.; Hua, H. Study on the hydraulic leveraged dynamic anti-resonance vibration isolator with nonlinear damping characteristics. J. Vib. Control 2023, 29, 1229–1242. [Google Scholar] [CrossRef]
- Xiao, H. Investigation of Helicopter Main Reducer Dynamic Anti-Resonance Vibration Isolation Platform. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2017. [Google Scholar]
- Karnopp, D.C.; Margolis, D.L.; Rosenberg, R.C. System Dynamics: Modeling, Simulation, and Control of Mechatronic Systems; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Boudon, B.; Malburet, F.; Carmona, J. Bond Graph Modeling and Simulation of a Vibration Absorber System in Helicopters. In Bond Graphs for Modelling, Control and Fault Diagnosis of Engineering Systems; Springer: Cham, Switzerland, 2017; pp. 387–429. [Google Scholar]
- Tabatabaei, S.K.; Behbahani, S.; de Silva, C.W. Self-adjusting multidisciplinary design of hydraulic engine mount using bond graphs and inductive genetic programming. Eng. Appl. Artif. Intell. 2016, 48, 32–39. [Google Scholar] [CrossRef]
- Tripathi, J.P.; Ghoshal, S.K.; Dasgupta, K.; Das, J. Bond graph modelling of a hydraulic cylinder-actuated planar manipulator. J. Braz. Soc. Mech. Sci. 2017, 39, 4275–4287. [Google Scholar] [CrossRef]
- Kocak, K.; Yilmaz, C. Design of a compliant lever-type passive vibration isolator with quasi-zero-stiffness mechanism. J. Sound. Vib. 2023, 558, 117758. [Google Scholar] [CrossRef]
- Wahl, A.M. Mechanical Springs; McGraw-Hill: New York, NY, USA, 1963. [Google Scholar]
- Iandiorio, C.; Salvini, P. An Engineering Theory of thick Curved Beams loaded in-plane and out-of-plane: 3D Stress Analysis. Eur. J. Mech. A/Solids 2022, 92, 104484. [Google Scholar] [CrossRef]
- Cadet, G.; Paredes, M. A new exhaustive semi-analytical method to calculate stress distribution on the surface of a curved beam with circular cross section, with an application to helical compression springs. Eur. J. Mech. A/Solids 2024, 103, 105191. [Google Scholar] [CrossRef]
- Xueqian, C.; Zhanpeng, S.; Qinshu, H.; Qiang, D.; Xin En, L. Influence of uncertainty and excitation amplitude on the vibration characteristics of rubber isolators. J. Sound Vib. 2016, 377, 216–225. [Google Scholar] [CrossRef]
- Chowdhury, S.; Banerjee, A.; Adhikari, S. Enhancing seismic resilience of structures through optimally designed nonlinear negative stiffness base isolators: Exact closed-form expressions. In Nonlinear Dynam; Springer: Berlin/Heidelberg, Germany, 2024; pp. 1–24. [Google Scholar]
- Ye, K.; Ji, J.C. Dynamic analysis of the effects of self-weight induced structural and damping nonlinearity on the performance of an origami-inspired vibration isolator. J. Sound Vib. 2023, 547, 117538. [Google Scholar] [CrossRef]
- Yao, H.; Cao, Y.; Zhang, S.; Wen, B. A novel energy sink with piecewise linear stiffness. In Nonlinear Dynam; Springer: Berlin/Heidelberg, Germany, 2018; Volume 94, pp. 2265–2275. [Google Scholar]
- Chowdhury, S.; Banerjee, A. The nonlinear dynamic analysis of optimum nonlinear inertial amplifier base isolators for vibration isolation. In Nonlinear Dynam; Springer: Berlin/Heidelberg, Germany, 2023; Volume 111, pp. 12749–12786. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| (kg) | 10.3 |
| (kg) | 0.28 |
| (N/m) | 3.9 × 105 |
| (N/m) | 1.72 × 104 |
| (m5/N) | 2.099 × 10−10 |
| (m5/N) | 9.8 × 10−11 |
| (m2) | 0.0106 |
| (m2) | 0.002 |
| Parameters | Values |
|---|---|
| (N·s/m) | 174.079 |
| (N·s/m5) | 6.02 × 104 |
| (N·s/m) | 4.979 |
| Parameters | Set 2 | Set 3 | Set 4 |
|---|---|---|---|
| (kg) | 10.3 | 10.3 | 10.3 |
| (N/m) | 3.9 × 105 | 5.4 × 105 | 5.9 × 105 |
| (N·s/m) | 257 | 282 | 270 |
| (m5/N) | 2.099 × 10−10 | 1.364 × 10−10 | 9.0152 × 10−11 |
| (N·s/m5) | 1.87 × 105 | 6.14 × 105 | 7.48 × 105 |
| (m5/N) | 1.248 × 10−10 | 1.248 × 10−10 | 1.248 × 10−10 |
| (N/m) | 2.43 × 104 | 2.43 × 104 | 2.43 × 104 |
| (N·s/m) | 14 | 13 | 14 |
| (kg) | 0.54 | 0.54 | 0.54 |
| (m2) | 0.0106 | 0.0106 | 0.0106 |
| (m2) | 0.0038 | 0.0038 | 0.0038 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Li, C.; Zhang, L.; Lei, Z.; Yang, J.; Lai, F. The Bond Graph Modeling and Experimental Verification of a Hydraulic Inertial Vibration Isolator Including Nonlinear Effects. Aerospace 2024, 11, 634. https://doi.org/10.3390/aerospace11080634
Liu N, Li C, Zhang L, Lei Z, Yang J, Lai F. The Bond Graph Modeling and Experimental Verification of a Hydraulic Inertial Vibration Isolator Including Nonlinear Effects. Aerospace. 2024; 11(8):634. https://doi.org/10.3390/aerospace11080634
Chicago/Turabian StyleLiu, Niuniu, Cheng Li, Liwei Zhang, Zhiyang Lei, Jing Yang, and Fuqiang Lai. 2024. "The Bond Graph Modeling and Experimental Verification of a Hydraulic Inertial Vibration Isolator Including Nonlinear Effects" Aerospace 11, no. 8: 634. https://doi.org/10.3390/aerospace11080634