
Finite-Time Convergence Guidance Law for Hypersonic Morphing Vehicle
Abstract
:1. Introduction
- Optimal theory-based. This guidance method category primarily utilizes the optimal theory to establish the Hamiltonian function based on flight constraints, obtaining the analytical solution of the control variables through the variational method and the principle of minimum. Kim [9] was the first to design an optimal angle guidance law for the longitudinal plane of a re-entry vehicle based on optimal control theory. Li [10] investigated a three-dimensional homing guidance problem of intercepting an evasive target with maneuverability comparable to the missile. Additionally, differential game guidance [11] and model predictive guidance [12] methods, derived from the optimal theory, have also become important research topics in the field of guidance. Liu [13] derived an optimal guidance law considering terminal interception and impact angle constraint.
- Nonlinear system control-based. This guidance method category originates from the modern control theory, establishing the system state equations based on the relative position relationships between the vehicles during the terminal guidance process. Control commands are designed using Lyapunov stability criteria to ensure the asymptotic stability of the guidance system, achieving target strikes by minimizing errors such as the line-of-sight angle. Anthony [14] designed a finite-time convergence guidance law under non-ideal conditions, reducing the required overload when the target maneuvers. Tang [15] designed a finite-time sliding mode guidance law, combining a disturbance observer to achieve terminal guidance with time constraints under disturbed conditions. Zhou [16] proposed a finite-time convergence sliding mode guidance method that can achieve terminal guidance with multiple constraints such as altitude, speed, and flight path angle. Zhang designed second-order sliding mode guidance laws considering actuator characteristics [17] and target movement characteristics [18], improving guidance accuracy under both conditions. Dong [19] proposed a guidance law considering terminal angle constraint and input saturation using the dynamic surface method.
- Machine learning-based. This guidance method category primarily utilizes learning models under specified conditions, designing reward functions based on flight missions to achieve vehicle guidance. Brian used reinforcement meta-learning methods to design an adaptive guidance law for terminal ballistic trajectories of hypersonic weapons, ensuring target hits and maneuver avoidance [20], and used reinforcement meta learning to optimize an adaptive guidance law [21]. Liu [22] designed a time-constrained guidance law combining deep neural networks within a predictive correction framework, optimizing guidance accuracy.
- Motion models for both the HMV and the defensive aircraft are established, and the relative motion relationships among the vehicle, the defensive aircraft, and the target point are developed. The control system equations for the guidance problem are also established.
- Guidance laws with finite-time convergence are designed and their stability is proven using the Lyapunov method. The impact of first-order actuator delay characteristics on the guidance laws is analyzed.
- A multi-model event-triggered switcher is designed to convert the acceleration commands derived from the guidance laws into commands for the angle of attack, bank angle, and sweep angle. Its stability is also proven.
- Simulations are conducted to validate the effectiveness and robustness of the guidance laws.
2. Guidance Model for Aircraft Vehicle
2.1. Aircraft Motion Model
- Earth is a homogeneous sphere;
- The aircraft is a mass point that satisfies the assumption of transient equilibrium;
- The sideslip angle β and the lateral force Z are both zero during flight;
- Earth’s rotation is not considered.
2.2. Relative Motion Model
3. Finite-Time Convergent Guidance Law Design
3.1. Design of the Control Law and Stability Proof
3.2. The Influence of a First-Order Characteristic Pilot Controller
4. Configuration Switching Method Design
4.1. Configuration Switching Method
- For the switching window, the window for the same model remains open at all times. After the aircraft completes one sweep change, the windows for other models are closed for a transition stabilization time ts.
- The controller operates as a zero-order hold, meaning if two time points are not consecutive, the controller retains the command from the previous time point until the next control time point arrives.
- There is no delay in the execution process.
- The purpose of the switching algorithm is to obtain the sweep angle, angle of attack, and bank angle.
- The switching of the sweep angle must ensure the stability of the aircraft’s wing deformation.
- The bank angle must satisfy the allowable range of variation.
4.2. Design of Performance Function
4.3. Stability of Multi-Model Switching
5. Simulation
5.1. Algorithm Effectiveness Simulation
- The aircraft has fixed 45° swept wings and uses proportional navigation (PN) law to reach the target.
- The aircraft changes the sweep angle, using finite-time convergence controller commands to evade defensive aircrafts and then fly to the target.
- The aircraft changes the sweep angle, considering the time delay characteristic of the first-order pilot in the finite-time convergence controller (TDFCC) commands to evade the defensive aircraft and reach the target.
- The aircraft changes the sweep angle, adding delay compensation for the pilot time delay characteristic to the finite-time convergence controller (DCFCC).
5.2. Comparison Simulation
5.2.1. Case 1
5.2.2. Case 2
6. Conclusions
- This paper introduces a guidance law based on finite-time convergence methods specifically designed for hypersonic morphing vehicles during terminal guidance. The finite-time convergence guidance law designed in this paper can evade interception by tracking the “aircraft–target–defensive aircraft” angle and reach the target, ensuring safety and efficiency. The development of a compensation algorithm that mitigates the impact of time delays on flight speed and mission performance is a significant advancement in enhancing the robustness of the guidance system.
- This paper proposes a control allocation method that utilizes a multi-model event-triggered mechanism to optimize shape and angle control quantities based on acceleration commands. The event-triggered multi-model switching controller designed in this paper can effectively map acceleration commands to angle and shape commands. The controller matches well with the guidance law, and the resulting “angle of attack–bank angle–sweep angle” commands. This method effectively translates acceleration commands into angle and shape adjustments, improving the vehicle’s performance in terms of energy efficiency and operational effectiveness.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liang, Z.; Ren, Z.; Li, Q.; Chen, J. Decoupled three-dimensional entry trajectory planning based on maneuver coefficient. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 231, 1281–1292. [Google Scholar] [CrossRef]
- Peng, W.; Yang, T.; Feng, Z.; Zhang, Q. Analysis of Morphing Modes of Hypersonic Morphing Aircraft and Multi-objective Trajectory Optimization. IEEE Access 2019, 7, 2244–2255. [Google Scholar] [CrossRef]
- Phoenix, A.A.; Rogers, R.E.; Maxwell, J.R. Mach five to ten morphing waverider: Control point study. J. Aircr. 2019, 56, 493–504. [Google Scholar] [CrossRef]
- Phoenix, A.A.; Maxwell, J.R.; Rogers, R.E. Mach 5–3.5 morphing waverider accuracy and aerodynamic performance evaluation. J. Aircr. 2019, 56, 2047–2061. [Google Scholar] [CrossRef]
- Jin, Z.; Yu, Z.; Meng, F.; Zhang, W.; Cui, J.; He, X.; Lei, Y.; Musa, O. Parametric Design Method and Lift/Drag Characteristics Analysis for a Wide-Range, Wing-Morphing Glide Vehicle. Aerospace 2024, 11, 257. [Google Scholar] [CrossRef]
- Dai, P.; YAN, B. Design and aerodynamic performance analysis of a variable-sweep-wing morphing waverider. Aerosp. Sci. Technol. 2020, 98, 105703. [Google Scholar] [CrossRef]
- Kumar, S.R.; Rao, S.; Ghose, D. Nonsingular Terminal Sliding Mode Guidance with Impact Angle Constraints. J. Guid. Control Dyn. 2014, 37, 1114–1130. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, R. Terminal Guidance for a Hypersonic Vehicle with Impact Time Control. J. Guid. Control Dyn. 2018, 41, 1790–1798. [Google Scholar] [CrossRef]
- Kim, M. Terminal guidance for impact attitude angle constrained flight trajectories. IEEE Trans. Aerosp. Electron. Syst. 1973, 6, 852–859. [Google Scholar] [CrossRef]
- Li, H.; Tao, H.; Wang, J.; He, S. Three-Dimensional Optimal Homing Guidance Without Terminal Maneuverability Advantage. J. Guid. Control Dyn. 2023, 46, 1774–1784. [Google Scholar] [CrossRef]
- Chen, J.; Sun, R.; Lu, Y.; Zhao, R. Adaptive Cooperative Game Penetration Guidance for Multiple Hypersonic Vehicles with Performance Constraints. IEEE Trans. Aerosp. Electron. Syst. 2024. Early Access. [Google Scholar] [CrossRef]
- Syed, A.U.I.; Dennis, B. Minimum Time-of-Flight Interceptor Guidance Using Real-Time-Implementable Model-Predictive Guidance. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA & Virtual, 3–7 January 2022. [Google Scholar]
- Liu, D. Optimal guidance law of reentry vehicle with terminal interception and impact angle constraints. In Proceedings of the 2017 36th Chinese Control Conference, Dalian, China, 26–28 July 2017. [Google Scholar]
- Anthony, J. Adaptive finite time intercept guidance. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Tang, B. Finite-time cooperative guidance law for multiple hypersonic vehicles in dive phase. In Proceedings of the 2020 Chinese Automation Congress, Shanghai, China, 6–8 November 2020. [Google Scholar]
- Zhou, M. Finite-time sliding mode based terminal area guidance with multiple constraints. In Proceedings of the 2018 3rd International Conference on Control and Robotics Engineering, Nagoya, Japan, 20–23 April 2018. [Google Scholar]
- Zhang, W.J.; Xia, Q.L. Novel second-order sliding mode guidance law with an impact angle constraint that considers autopilot lag for intercepting maneuvering targets. Aeronaut. J. 2020, 28, 1–21. [Google Scholar]
- Zhang, W.J. Finite time convergence cooperative guidance law for non-maneuvering moving targets. In Proceedings of the IEEE International Conference on Unmanned Systems, Beijing China, 17–19 October 2019. [Google Scholar]
- Dong, Y.; Xue, Z. Research on the Design of Integrated Guidance and Control of Missile Considering Terminal Angle Constraint and Input Saturation. In Proceedings of the 2023 IEEE 3rd International Conference on Electronic Technology, Communication and Information, Changchun, China, 26–28 May 2023. [Google Scholar]
- Brian, G.; Roberto, F. Terminal adaptive guidance for autonomous hypersonic strike weapons via reinforcement metalearning. J. Spacecr. Rockets 2023, 60, 286–298. [Google Scholar]
- Brian, G.; Kris, D.; Roberto, F. Adaptive Approach Phase Guidance for a Hypersonic Glider via Reinforcement Meta Learning. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA & Virtual, 3–7 January 2022. [Google Scholar]
- Liu, Z.C. Learning prediction-correction guidance for impact time control. Aerosp. Sci. Technol. 2021, 119, 107187. [Google Scholar] [CrossRef]
- Yao, D.; Xia, Q. Predictor–Corrector Guidance for a Hypersonic Morphing Vehicle. Aerospace 2023, 10, 795. [Google Scholar] [CrossRef]
- Hou, L.; Liu, H.; Yang, T.; An, S.; Wang, R. An Intelligent Autonomous Morphing Decision Approach for Hypersonic Boost-Glide Vehicles Based on DNNs. Aerospace 2023, 10, 1008. [Google Scholar] [CrossRef]
- Dai, P.; Yan, B.; Liu, R.; Liu, S.; Wang, M. Integrated Morphing Strategy and Trajectory Optimization of a Morphing Waverider and Its Online Implementation Based on the Neural Network. IEEE Access 2021, 9, 59383–59393. [Google Scholar] [CrossRef]
- Lu, P. Entry Guidance: A Unified Method. J. Guid. Control Dynam. 2014, 37, 713–728. [Google Scholar] [CrossRef]
- Dong, C.; Liu, Y.; Wang, Q. Barrier Lyapunov function based adaptive finite-time control for hypersonic flight vehicles with state constraints. ISA Trans. 2020, 96, 163–176. [Google Scholar] [CrossRef] [PubMed]
- Baldi, S.; Battistelli, G.; Mosca, E.; Tesi, P. Multi-model unfalsified adaptive switching supervisory control. Automatica 2010, 46, 249–259. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
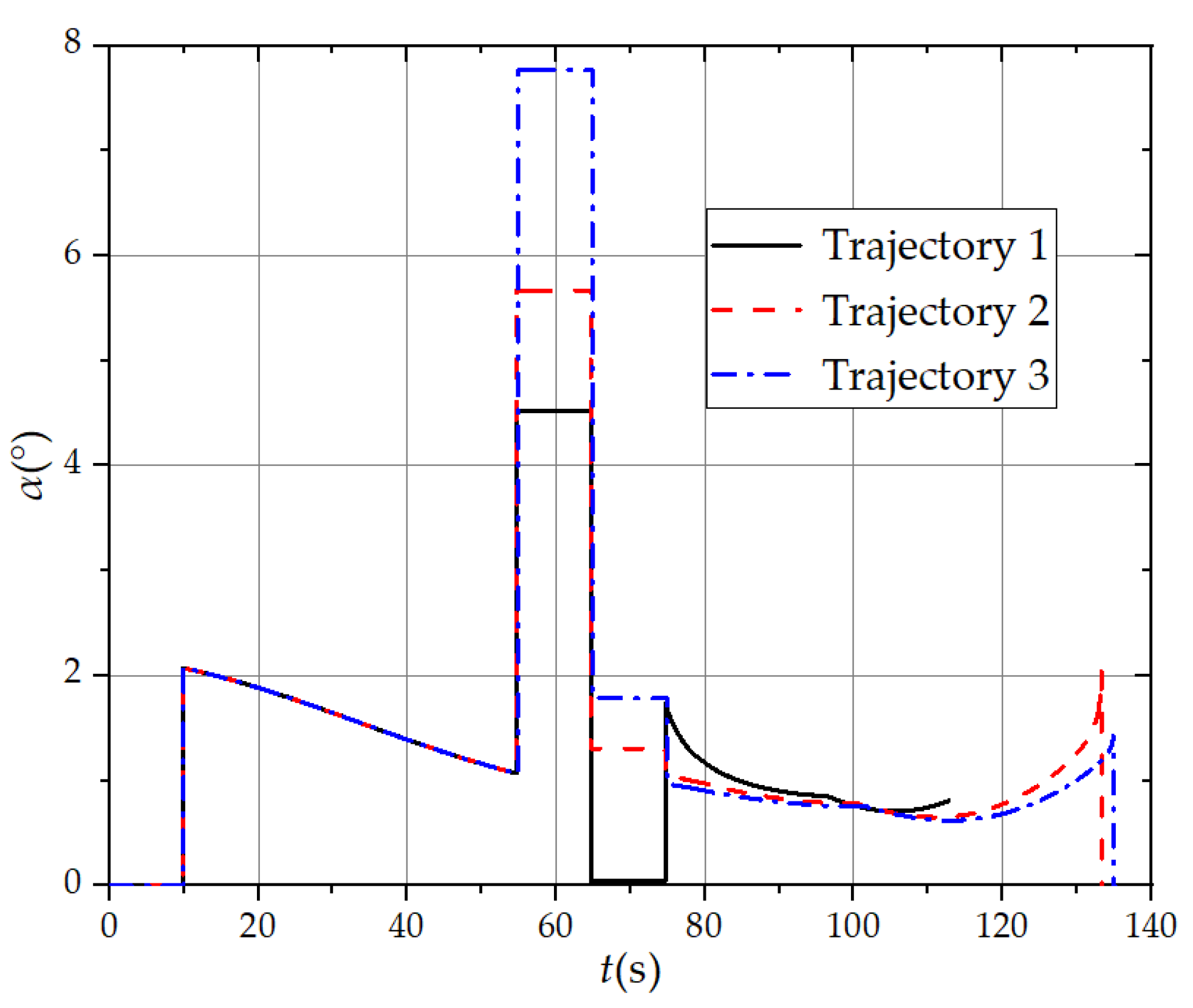
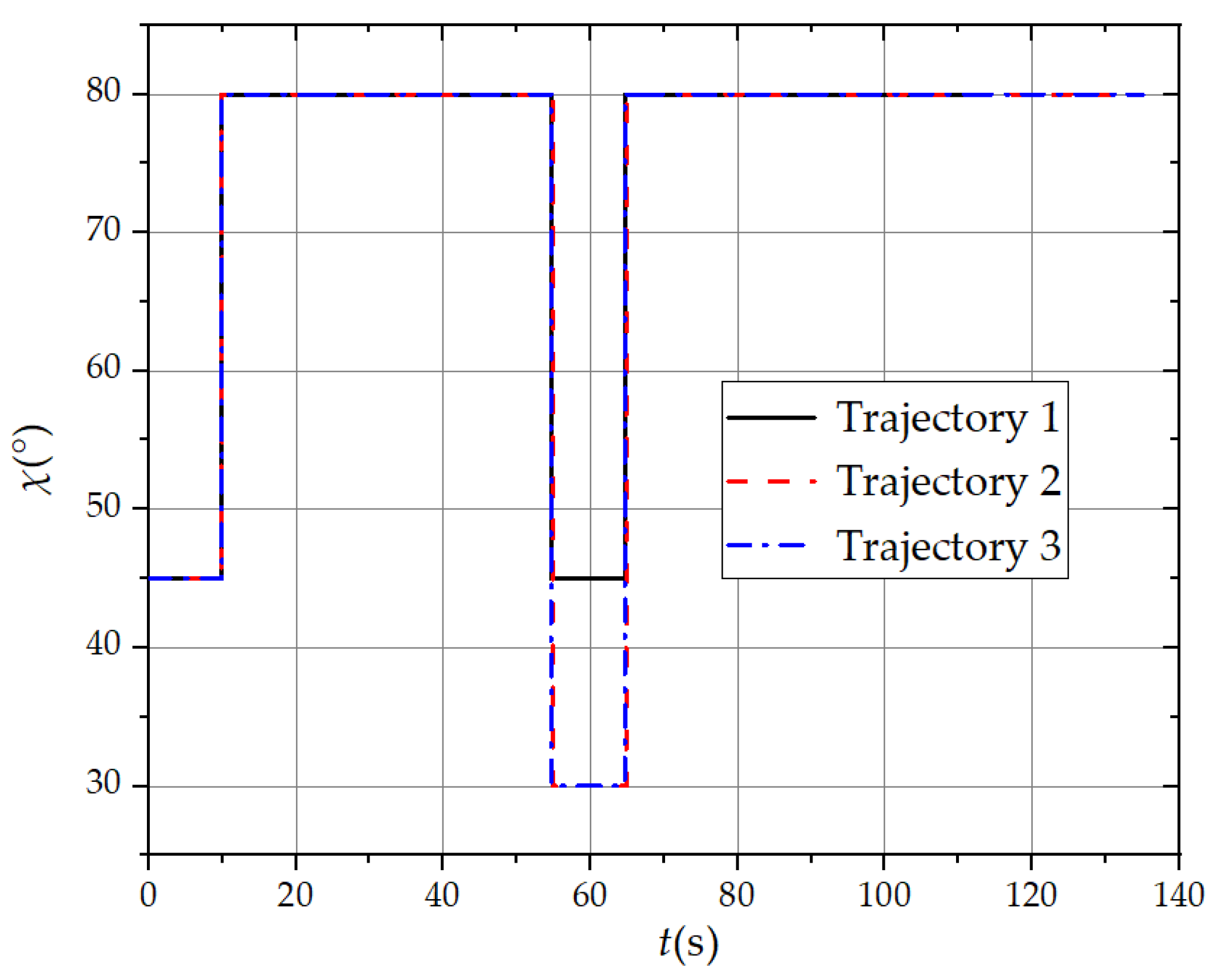
| Available Overload | χ1 = 30° | χ2 = 45° | χ3 = 80° |
|---|---|---|---|
| Trajectory 1 | 3 | 4 | 5 |
| Trajectory 2 | 4.5 | 6 | 7.5 |
| Trajectory 3 | 6 | 8 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, D.; Xia, Q. Finite-Time Convergence Guidance Law for Hypersonic Morphing Vehicle. Aerospace 2024, 11, 680. https://doi.org/10.3390/aerospace11080680
Yao D, Xia Q. Finite-Time Convergence Guidance Law for Hypersonic Morphing Vehicle. Aerospace. 2024; 11(8):680. https://doi.org/10.3390/aerospace11080680
Chicago/Turabian StyleYao, Dongdong, and Qunli Xia. 2024. "Finite-Time Convergence Guidance Law for Hypersonic Morphing Vehicle" Aerospace 11, no. 8: 680. https://doi.org/10.3390/aerospace11080680