
Conceptual Design of Compliant Structures for Morphing Wingtips Using Single-Row Corrugated Panels




Abstract
1. Introduction
2. Model Definition
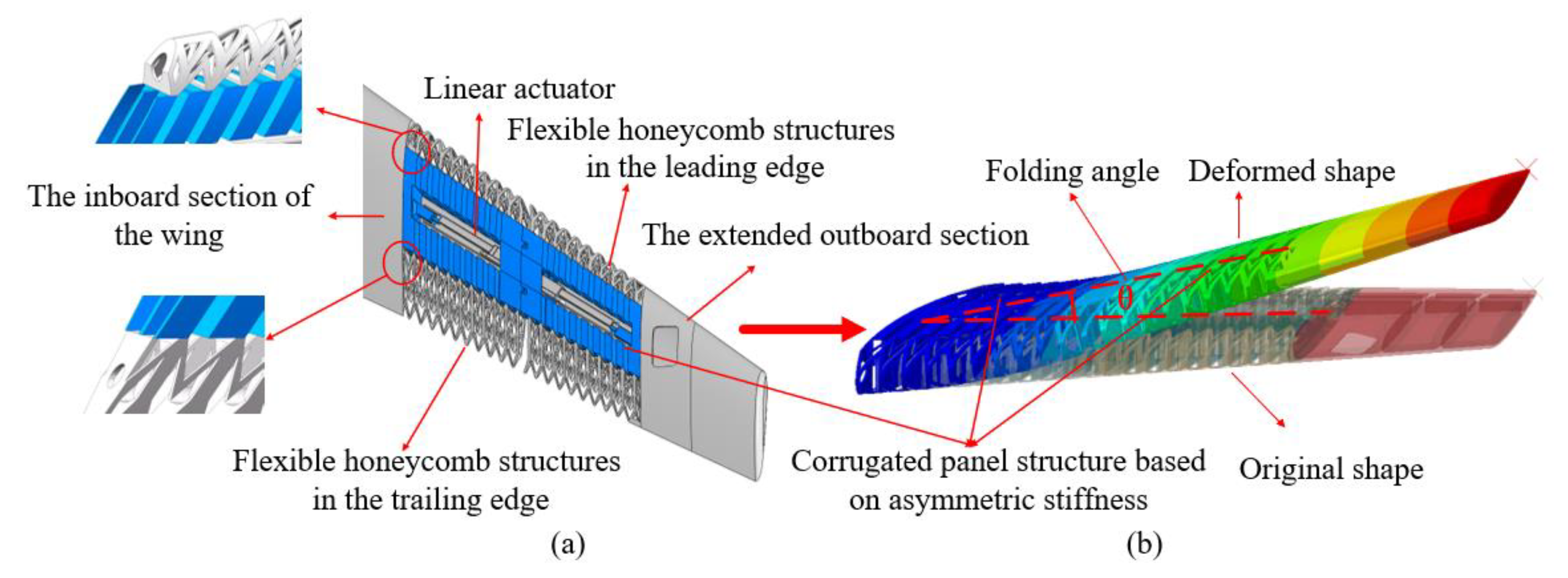
2.1. Compliant Morphing Wingtip
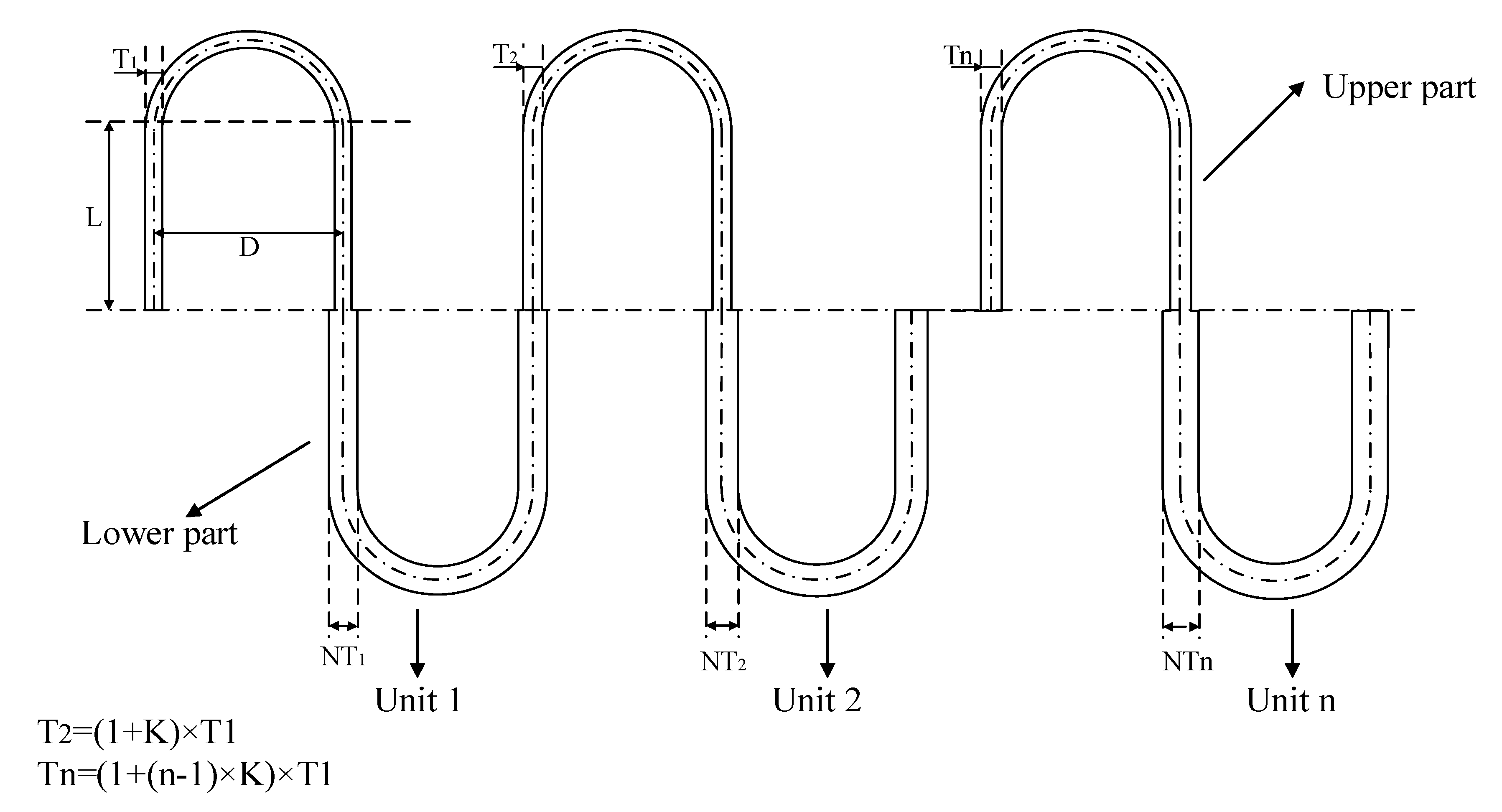
2.2. Asymmetric Stiffness Corrugated Panel
3. Numerical Simulation
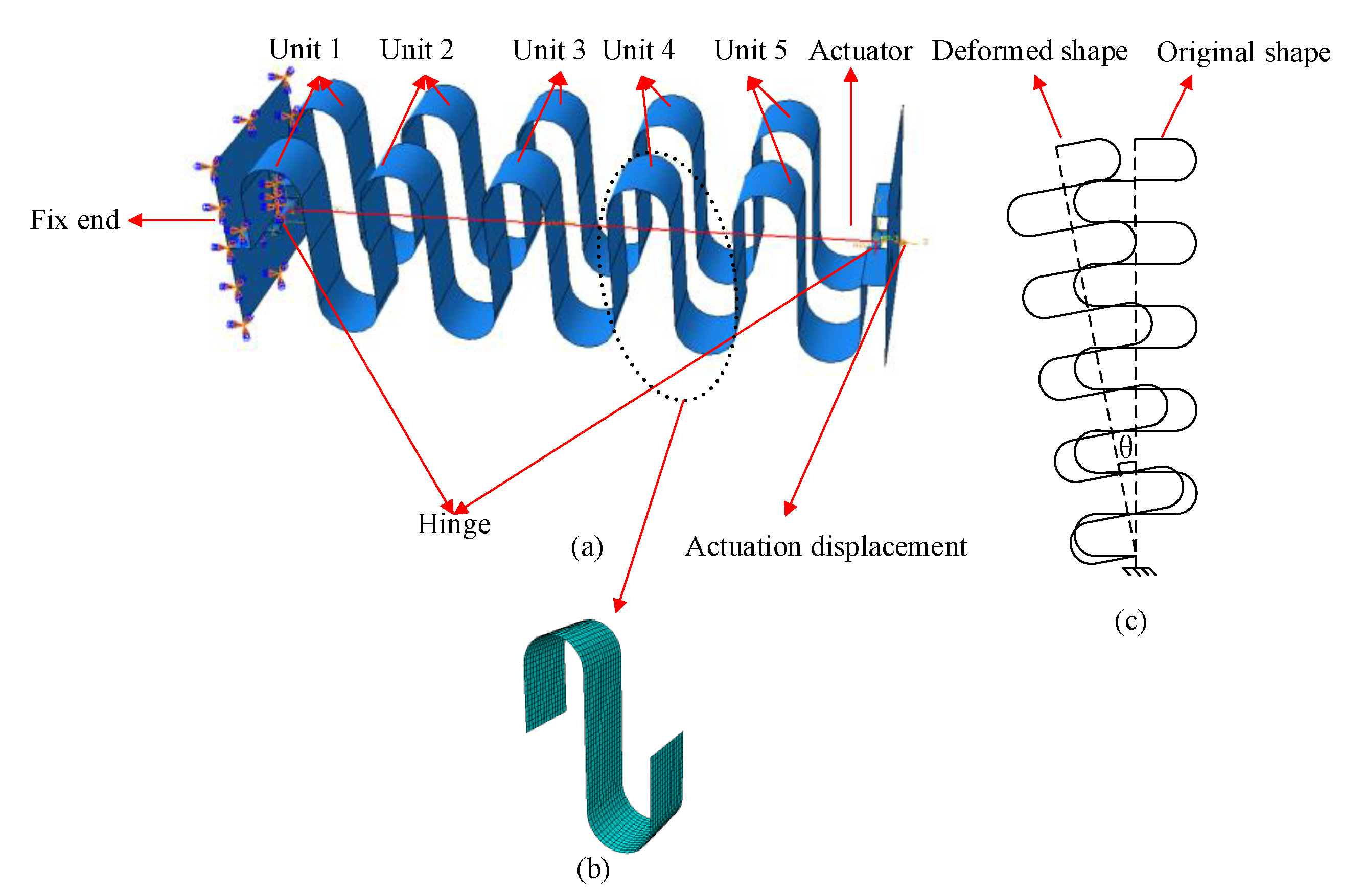
3.1. Structural Modelling
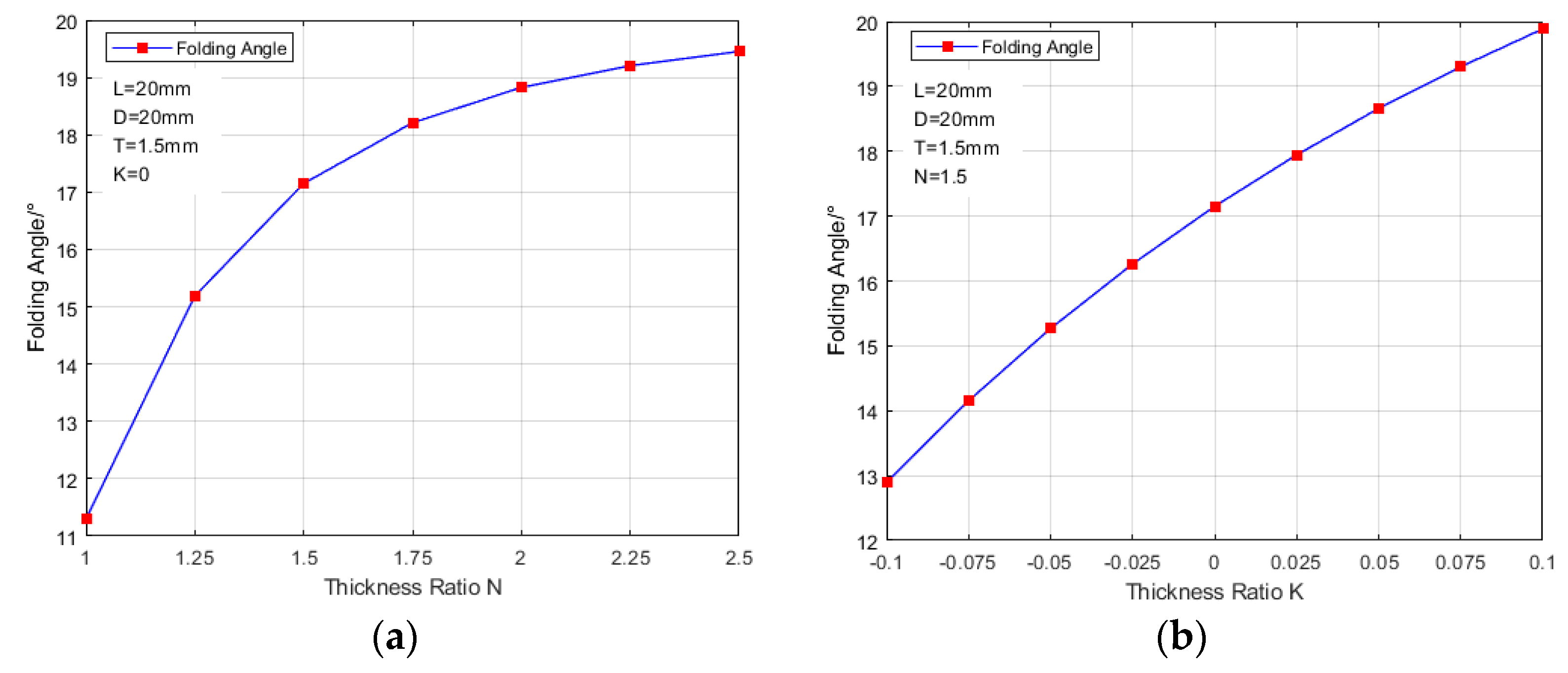
3.2. Parametric Study
4. Optimisation and Analysis
5. Experimental Validations
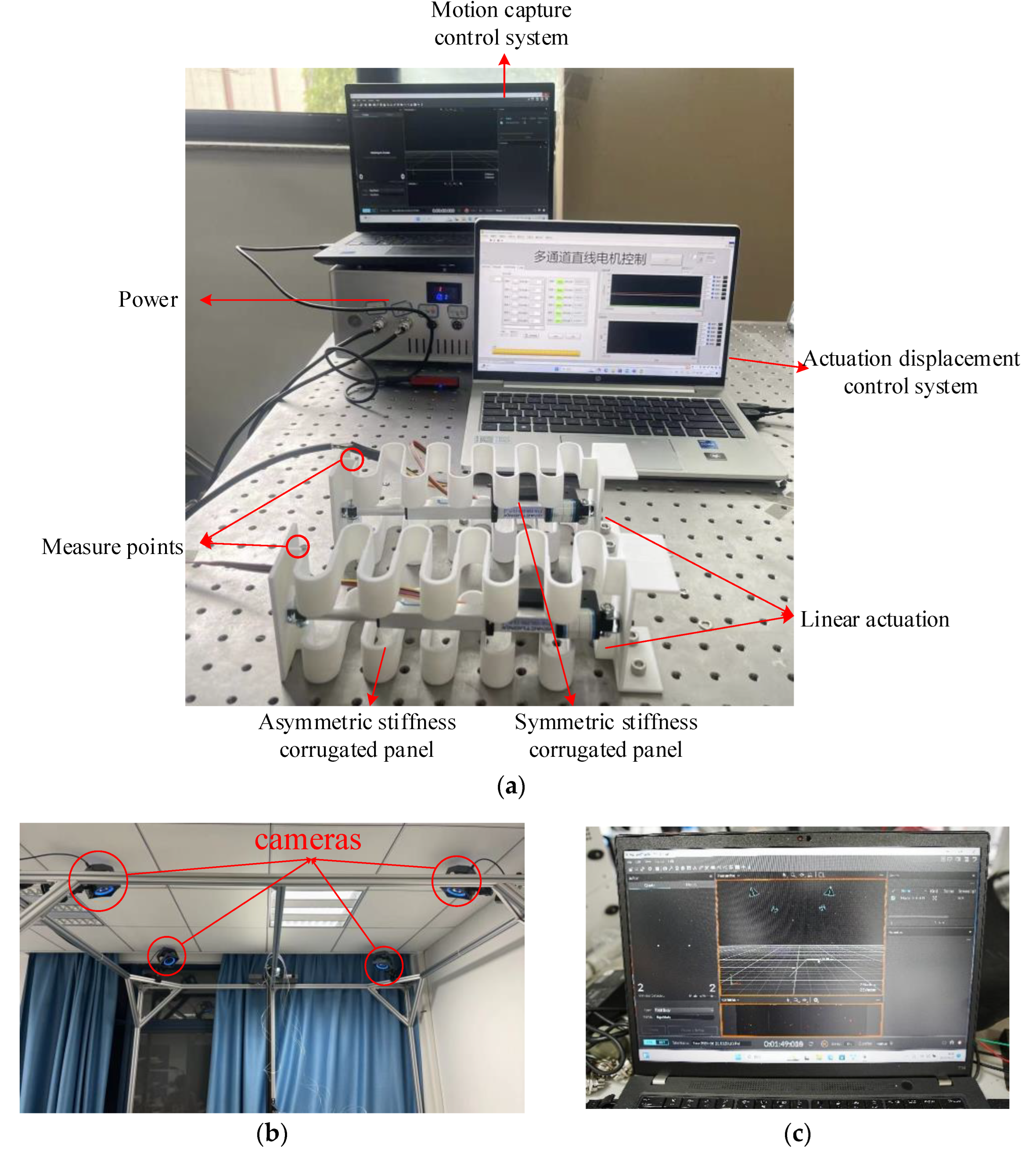
5.1. Experimental Design
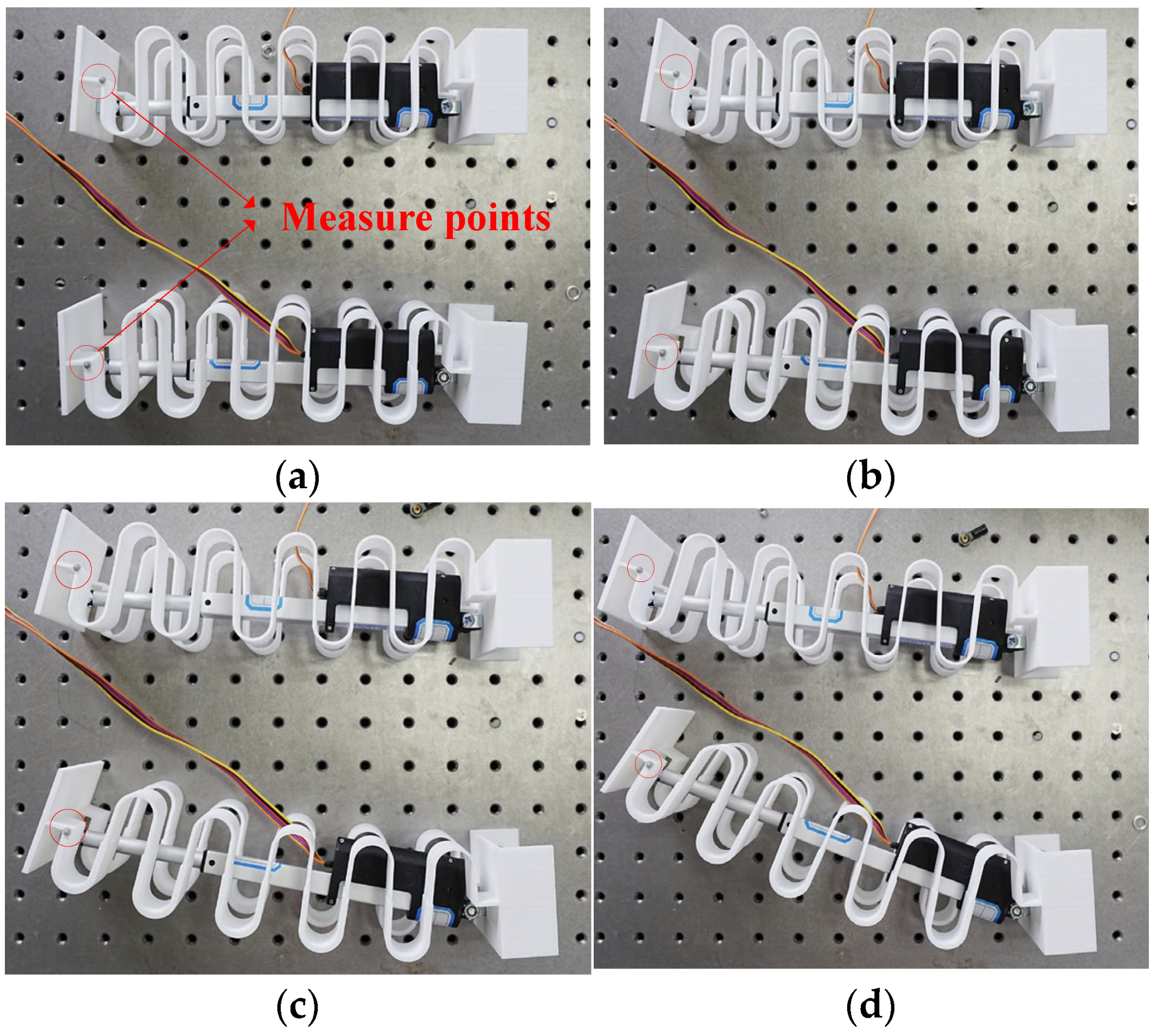
5.2. Experimental Analysis and Results
6. Conclusions
- By establishing a parametric model of single-row corrugated panels and carrying out a parametric analysis, the effects of stiffness tailoring on changing the folding angle of corrugated panels have been validated. The results show that the folding angle of the corrugated panel could be effectively increased by tuning the thickness characteristics of the corrugated panel.
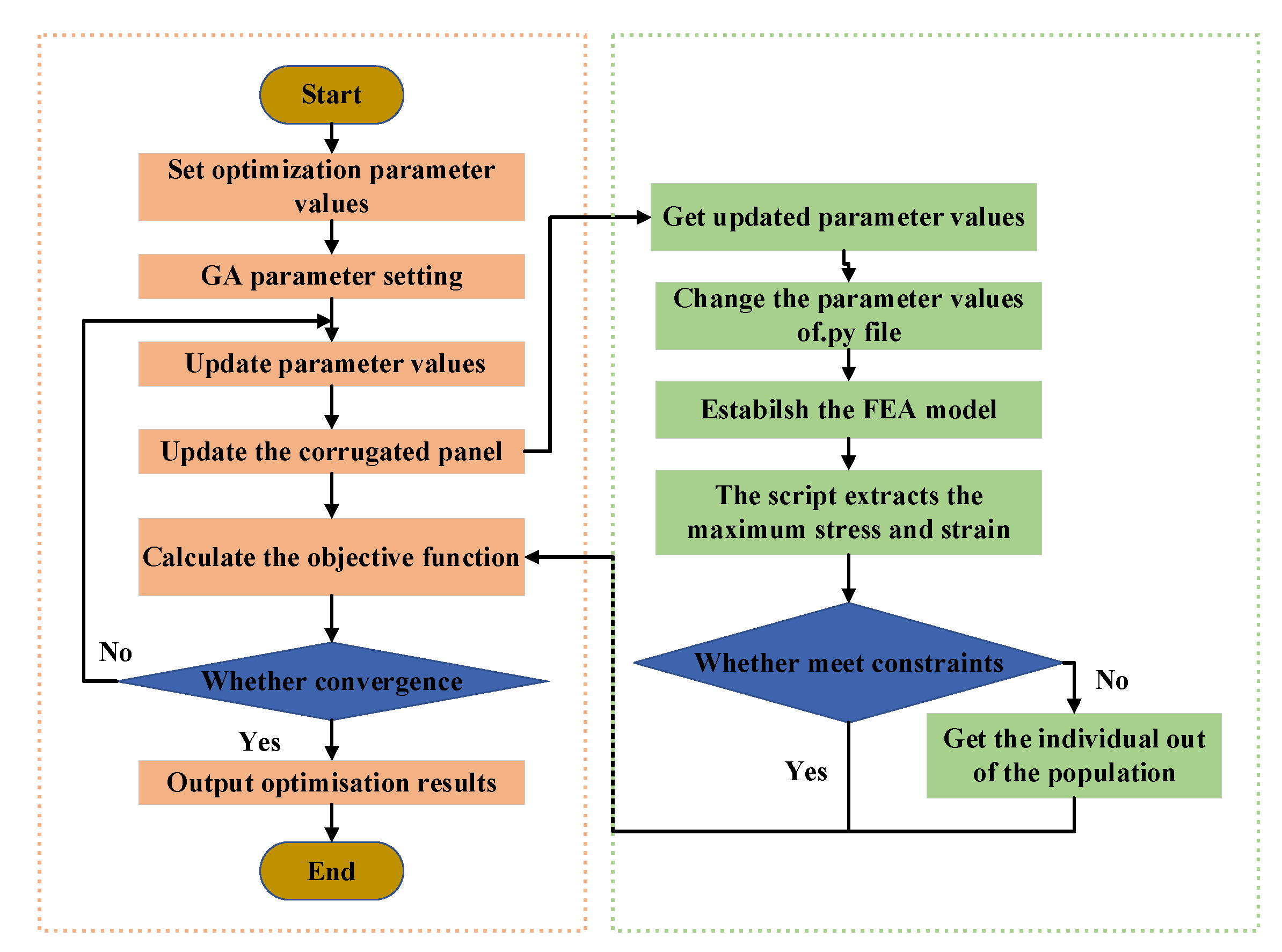
- A framework is created to optimise the corrugated panels using a genetic algorithm. The results show that the folding angle of the corrugated panel structure could be effectively increased while the maximum Von Mises stress and strain can satisfy the constraints.
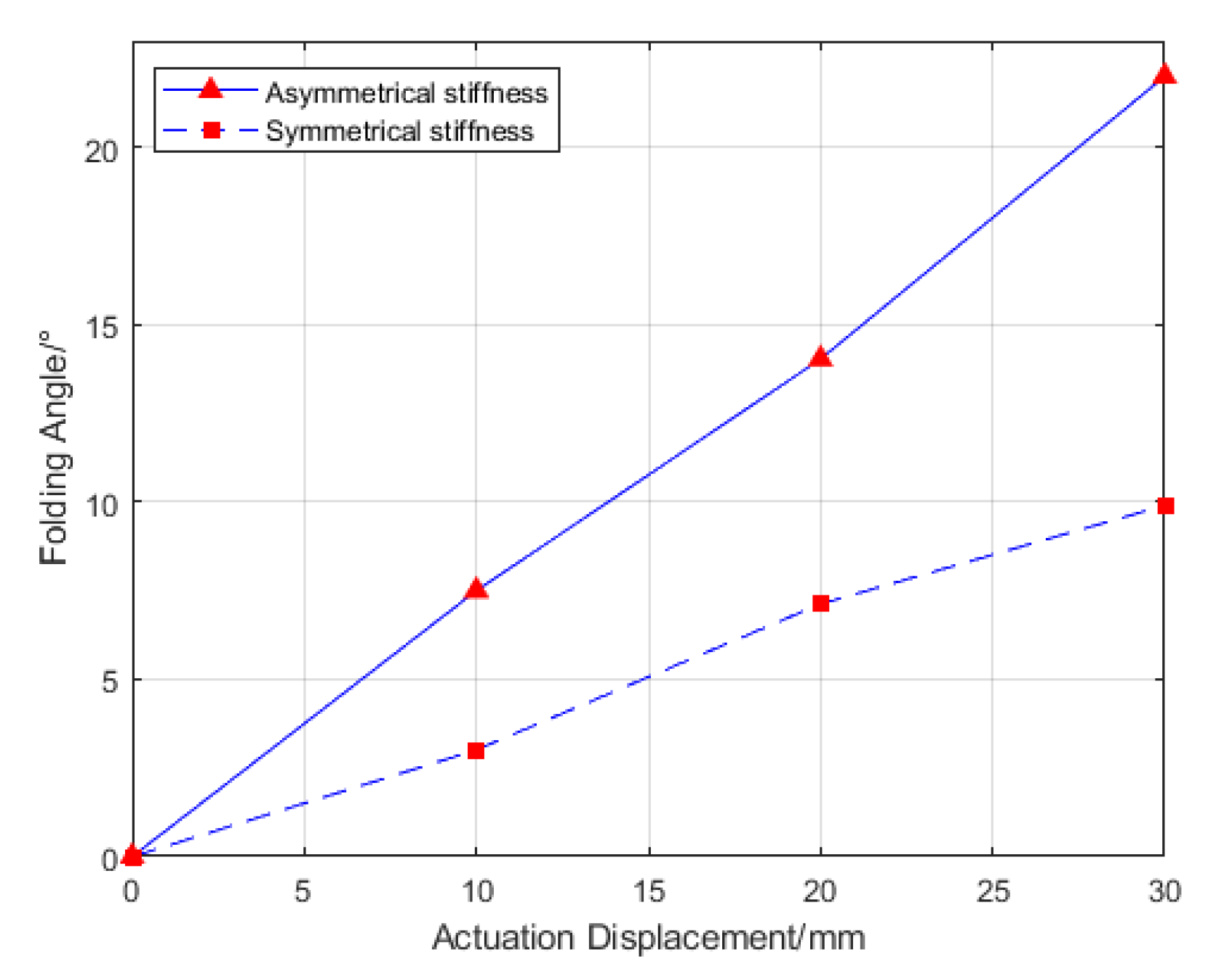
- Based on the optimisation results, corrugated panels of symmetric and asymmetric stiffness are fabricated using 3D printing and validated with experiment. The experimental results indicate that the folding angle of the asymmetric stiffness corrugated panel structure is increased by 123.2% compared with symmetric stiffness, demonstrating its potential for the design of compliant morphing wingtip structures.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Weisshaar, T.A. Morphing aircraft technology-new shapes for aircraft design. In Multifunctional Structures/Integration of Sensors and Antennas, Meeting Proceedings RTO-MP-AVT-141, Overview 1; RTO: Neuilly-sur-Seine, France, 2006. [Google Scholar]
- Li, D.; Zhao, S.; Da Ronch, A.; Xiang, J.; Drofelnik, J.; Li, Y.; Zhang, L.; Wu, Y.; Kintscher, M.; Monner, H.P.; et al. A review of modelling and analysis of morphing wings. Prog. Aerosp. Sci. 2018, 100, 46–62. [Google Scholar] [CrossRef]
- Smith, D.D.; Lowenberg, M.H.; Jones, D.P.; Friswell, M.I. Computational and experimental validation of the active morphing wing. J. Aircr. 2014, 51, 925–937. [Google Scholar] [CrossRef]
- De Breuker, R.; Werter, N. On the importance of morphing deformation scheduling for actuation force and energy. Aerospace 2016, 3, 41. [Google Scholar] [CrossRef]
- Montano, F.; Dimino, I.; Milazzo, A. A Preliminary Evaluation of Morphing Horizontal Tail Design for UAVs. Aerospace 2024, 11, 266. [Google Scholar] [CrossRef]
- Bourdin, P.; Gatto, A.; Friswell, M.I. Aircraft control via variable cant-angle winglets. J. Aircr. 2008, 45, 414–423. [Google Scholar] [CrossRef]
- Han, M.W.; Rodrigue, H.; Kim, H.; Song, S.H.; Ahn, S.H. Shape memory alloy/glass fiber woven composite for soft morphing winglets of unmanned aerial vehicles. Compos. Struct. 2016, 140 (Suppl. C), 202–212. [Google Scholar] [CrossRef]
- Li, W.; Xiong, K.; Chen, H.; Zhang, X. Research on variable cant angle winglets with shape memory alloy spring actuators. Acta Aeronaut. Et Astronaut. Sin. 2012, 33, 22–33. [Google Scholar]
- Spivey, D.; Sur, P. Spanwise adaptive wing. In NASA Report: AFRC-E-DAA_TN57916; AIAA Aviation: Atlanta, GA, USA, 2018. [Google Scholar]
- Chen, Y.; Yin, W.; Liu, Y.; Leng, J. Structural design and analysis of morphing skin embedded with pneumatic muscle fibers. Smart Mater. Struct. 2011, 20, 085033. [Google Scholar] [CrossRef]
- Sun, J.; Gao, H.; Scarpa, F.; Lira, C.; Liu, Y.; Leng, J. Active inflatable auxetic honeycomb structural concept for morphing wingtips. Smart Mater. Struct. 2014, 23, 125023. [Google Scholar] [CrossRef]
- Sun, J.; Du, L.; Scarpa, F.; Liu, Y.; Leng, J. Morphing wingtip structure based on active inflatable honeycomb and shape memory polymer composite skin: A conceptual work. Aerosp. Sci. Technol. 2021, 111, 106541. [Google Scholar] [CrossRef]
- Yin, W.; Shi, Q. Review of Material and Structure for Morphing Aircraft Skin. Aeronaut. Manuf. Technol. 2017, 17, 24–29. [Google Scholar]
- Thill, C.; Etches, J.A.; Bond, I.P.; Potter, K.D.; Weaver, P.M. Composite corrugated structures for morphing wing skin applications. Smart Mater. Struct. 2010, 19, 124009–124018. [Google Scholar] [CrossRef]
- Dayyani, I.; Khodaparast, H.H.; Woods, B.K.S.; Friswell, M.I. The design of a coated composite corrugated skin for the camber morphing airfoil. J. Intell. Mater. Syst. Struct. 2014, 26, 1592–1608. [Google Scholar] [CrossRef]
- Bai, J.; Chen, D.; Xiong, J.; Dong, C. A semi-analytical model for predicting nonlinear tensile behaviour of corrugated flexible composite skin. Compos. Part B Eng. 2019, 168, 312–319. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, C.; Shaw, A.D.; Amoozgar, M.R.; Friswell, M.I. Passive energy balancing design for a linear actuated morphing wingtip structure. Aerosp. Sci. Technol. 2020, 107, 106279. [Google Scholar] [CrossRef]
- Zhang, J.; Shaw, A.D.; Wang, C.; Gu, H.; Amoozgar, M.R.; Friswell, M.I.; Woods, B.K.S. Aeroelastic Model and Analysis of an Active Camber Morphing Wing. Aerosp. Sci. Technol. 2021, 111, 106534. [Google Scholar] [CrossRef]
- Wang, C.; Khodaparast, H.H.; Friswell, M.I. Conceptual study of a morphing winglet based on unsymmetrical stiffness. Aerosp. Sci. Technol. 2016, 58, 546–558. [Google Scholar] [CrossRef]
- Wang, C.; Khodaparast, H.H.; Friswell, M.I. Development of a morphing wingtip based on compliant structures. J. Intell. Mater. Syst. Struct. 2018, 29, 3293–3304. [Google Scholar] [CrossRef]
- Wang, C.; Khodaparast, H.; Friswell, M.; Shaw, A. Compliant structures based on stiffness asymmetry. Aeronaut. J. 2018, 122, 442–461. [Google Scholar] [CrossRef]
- Dassault, S. Abaqus Analysis User’s Guide; Dassault Systèmes: Vélizy-Villacoublay, France, 2019. [Google Scholar]
- The MathWorks Inc. MATLAB R2020b; The MathWorks Inc.: Natick, MA, USA, 2020. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulus/MPa | Poisson’s Ratio | Yield Strength/ MPa | Density/ton/mm3 |
|---|---|---|---|
| 1500 | 0.3 | 42 | 0.93 × 10−9 |
| Mesh size/mm | 1.5 | 2 | 2.5 | 3 |
| Folding angle/° | 11.24 | 11.27 | 11.29 | 11.34 |
| Parameter | Lower Value | Upper Value | |
|---|---|---|---|
| L | Vertical length | 15 mm | 35 mm |
| D | Diameter of each corrugation unit | 15 mm | 35 mm |
| T | Upper thickness of the first corrugation unit | 1.5 mm | 2.5 mm |
| N | Upper and lower thickness ratio | 1 | 3 |
| K | The ratio of thickness increment between corrugation units | −0.1 | 0.1 |
| Parameter | Optimal Value |
|---|---|
| Vertical length | 17.91 mm |
| Diameter of each corrugation unit | 18.08 mm |
| Upper thickness of the first corrugation unit | 1.51 mm |
| Upper and lower thickness ratio | 1.73 |
| The ratio of thickness increment between corrugation units | 0.092 |
| Folding angle before optimisation | 13.1° |
| Folding angle after optimisation | 23.1° |
| Numerical Results | Experimental Results | |
|---|---|---|
| Before Optimisation | 13.1 | 9.9 |
| After Optimisation | 23.1 | 22.1 |
| Increment | 76.1% | 123.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Fan, S.; Wang, C.; Li, S.; Zhao, Y.; Shen, X.; Zhang, J. Conceptual Design of Compliant Structures for Morphing Wingtips Using Single-Row Corrugated Panels. Aerospace 2024, 11, 682. https://doi.org/10.3390/aerospace11080682
He Z, Fan S, Wang C, Li S, Zhao Y, Shen X, Zhang J. Conceptual Design of Compliant Structures for Morphing Wingtips Using Single-Row Corrugated Panels. Aerospace. 2024; 11(8):682. https://doi.org/10.3390/aerospace11080682
Chicago/Turabian StyleHe, Ziyi, Siyun Fan, Chen Wang, Songqi Li, Yan Zhao, Xing Shen, and Jiaying Zhang. 2024. "Conceptual Design of Compliant Structures for Morphing Wingtips Using Single-Row Corrugated Panels" Aerospace 11, no. 8: 682. https://doi.org/10.3390/aerospace11080682
APA StyleHe, Z., Fan, S., Wang, C., Li, S., Zhao, Y., Shen, X., & Zhang, J. (2024). Conceptual Design of Compliant Structures for Morphing Wingtips Using Single-Row Corrugated Panels. Aerospace, 11(8), 682. https://doi.org/10.3390/aerospace11080682