
Development of a Modular Test Rig for In-Flight Validation of a Multi-Hole Probe Onboard the e-Genius-Mod

 ,
, 
Abstract
:1. Introduction
1.1. The Role of SFDs in Aviation
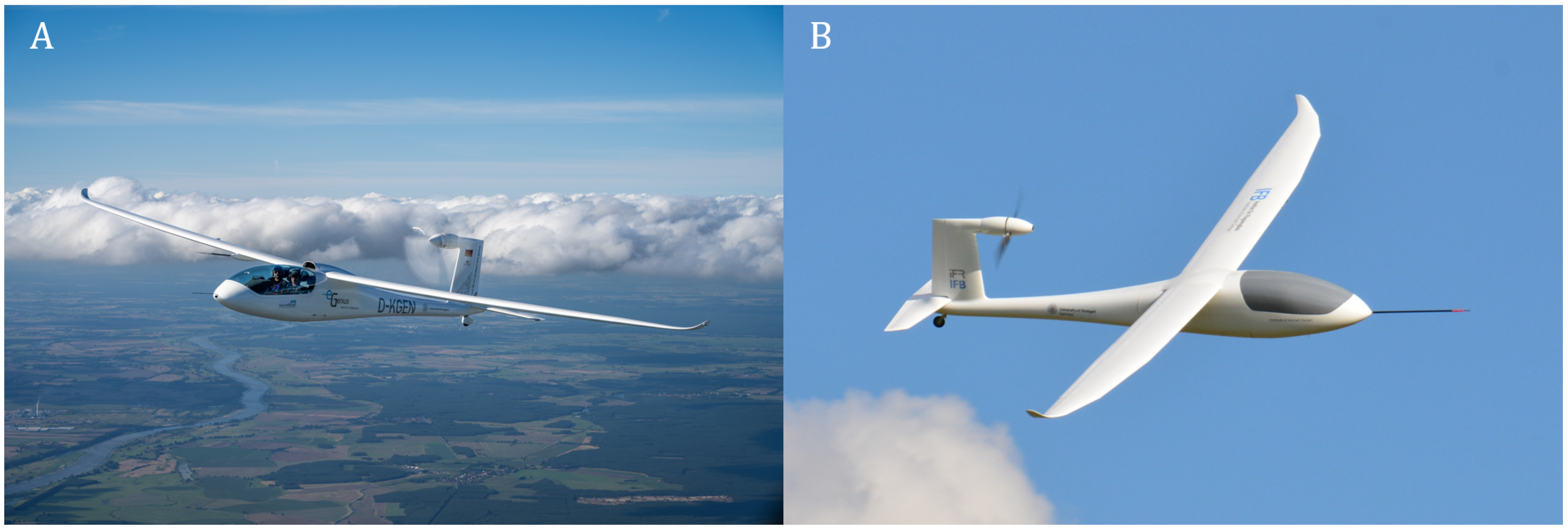
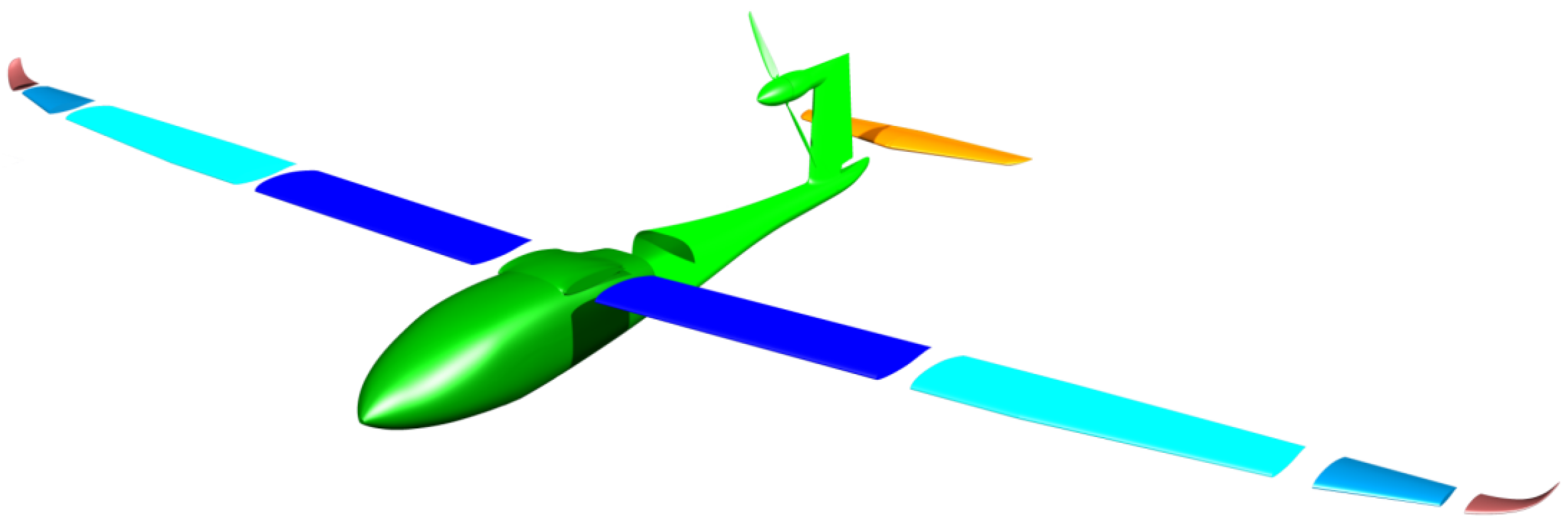
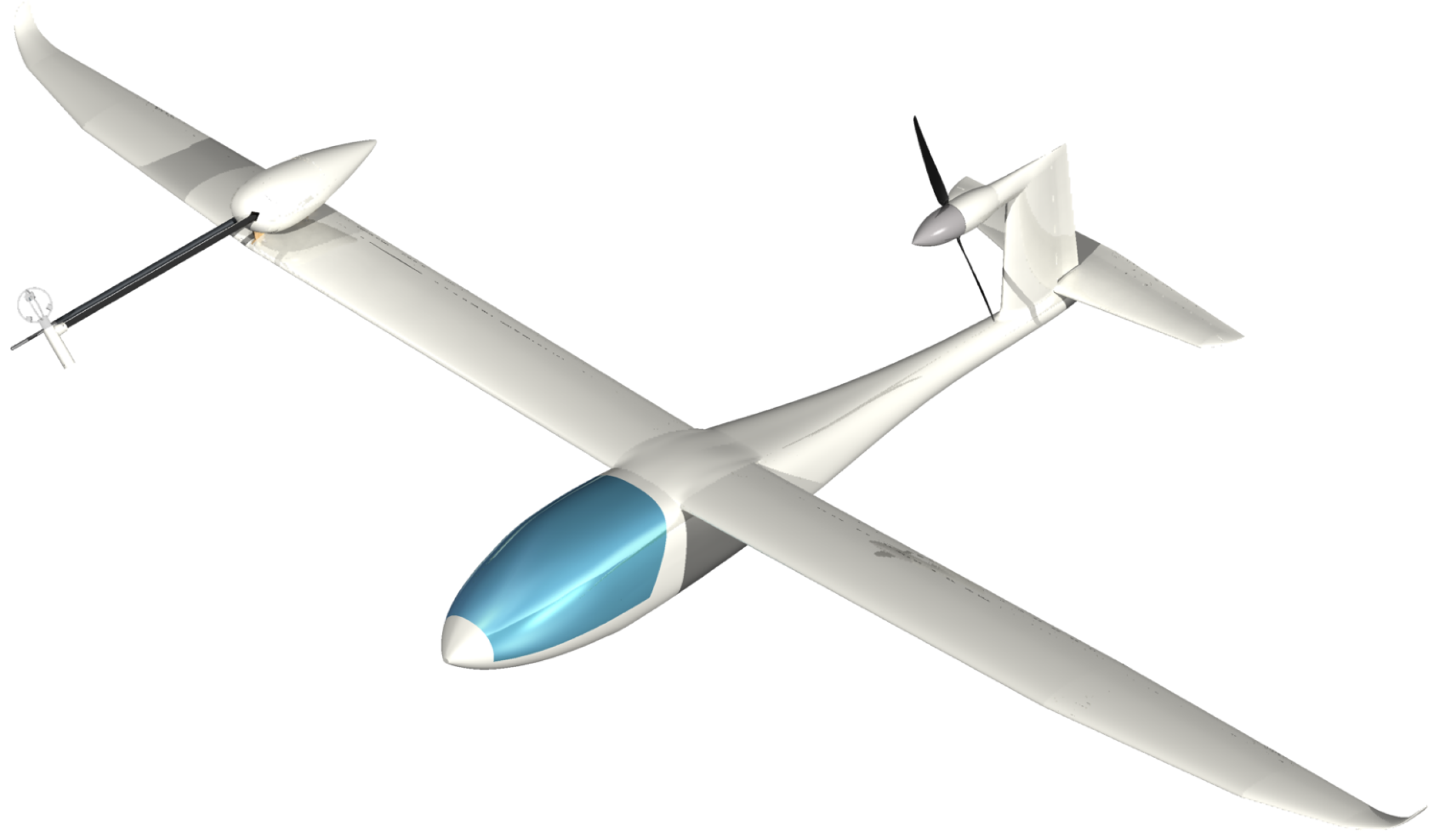
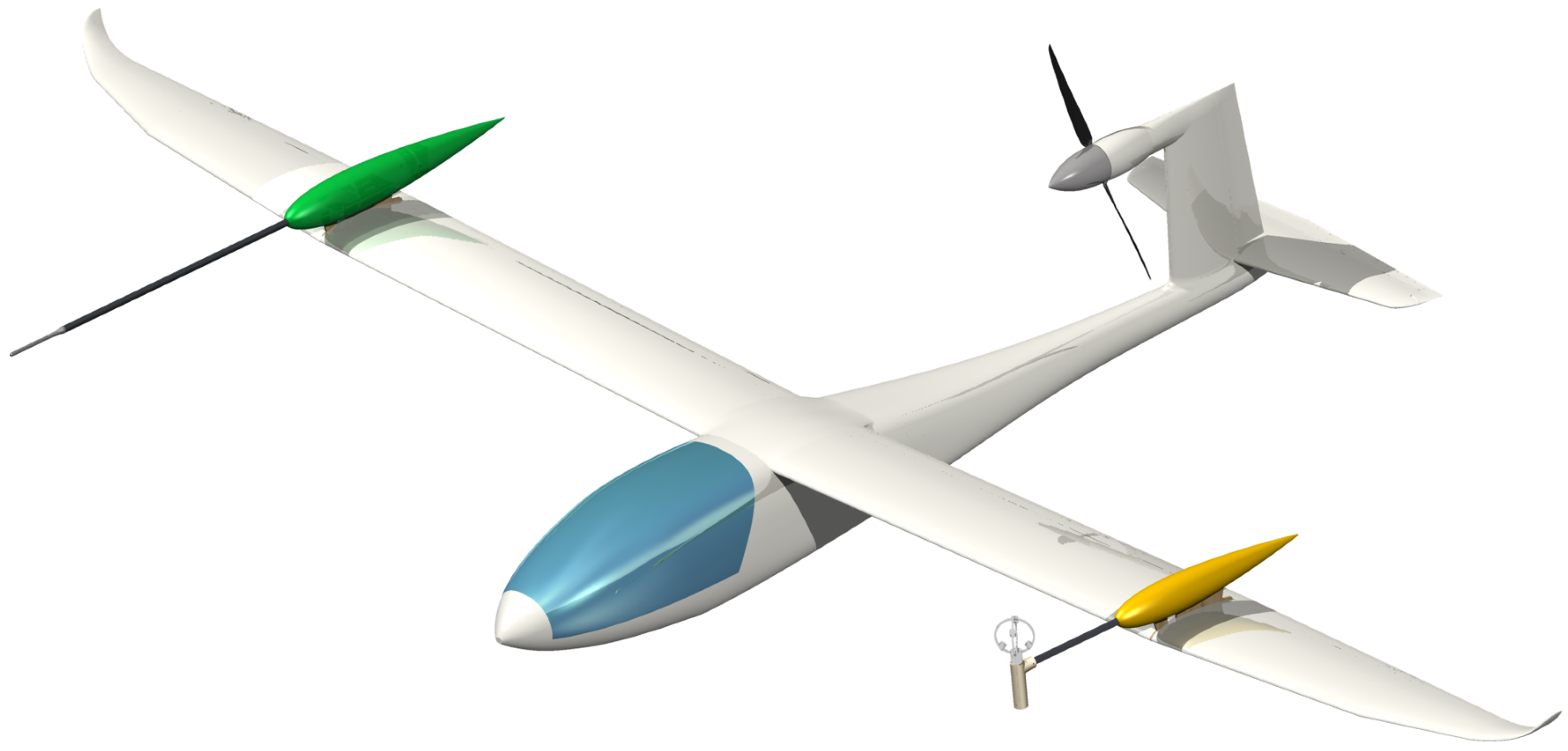
1.2. The e-Genius-Mod

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Aircraft length | 2.95 m |
| Wing span | 5.62 m |
| Wing area | 1.5 6m2 |
| Aspect ratio | 20.2 |
| Maximum take-off mass (MTOM) | 41 kg |
| Maximum payload | 10 kg |
| Electric drive power | 5 kW |
| Max. thrust | 156 N |
| Design speed | 24.8 m/s |
| Battery capacity | 63 Ah 1 |
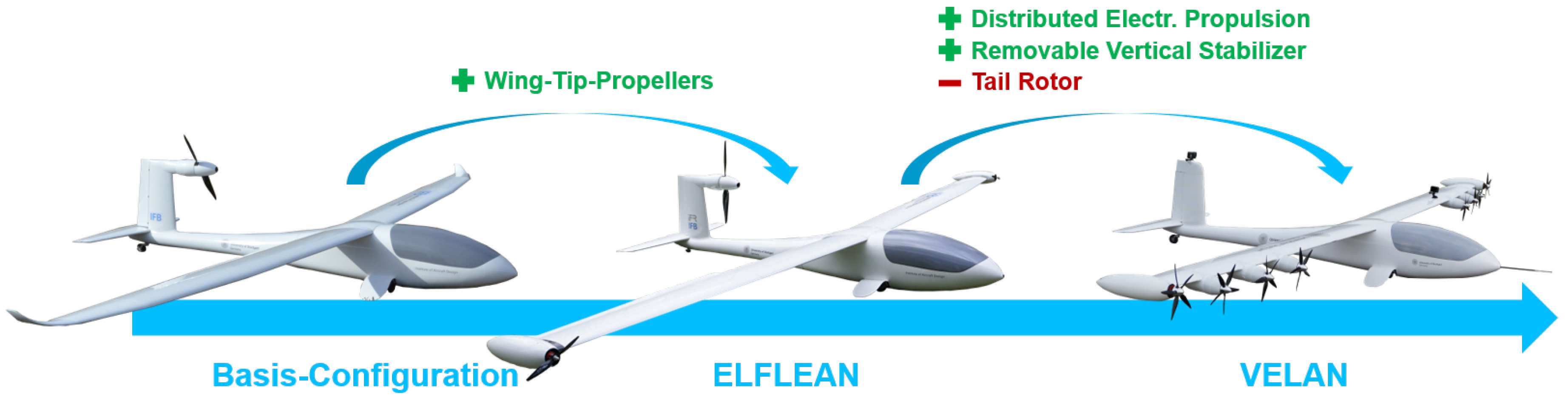
1.3. Utilization of the e-Genius-Mod as a Technology Test Platform
| Unit | Sensor Type | Variable |
|---|---|---|
| Board computer [Pixhawk 4®] by Holybro (Hongkong) | Inertial Measurement Unit (IMU) Estimation via Kalman filter (IMU, GPS, Magnetometer Barometer) | Linear accelerations Rotation rates Position Attitude Velocity |
| Air data boom +Computer [VectoDAQ] by Vectoflow GmbH (Gilching, Germany) | 5-hole probe with temperature sensor | True air speed (TAS) Angle of attack () Angle of sideslip () Air density () |
| Actuator [Volz DA15N] by Volz Servos GmbH & Co. KG (Offenbach am Main, Germany) | Magnet sensor Rotor sensor | Control surface Deflection angle |
- Measurement of atmospheric influences during free flight;
- Utilization of UAVs as technology demonstrators.
2. Test Setup
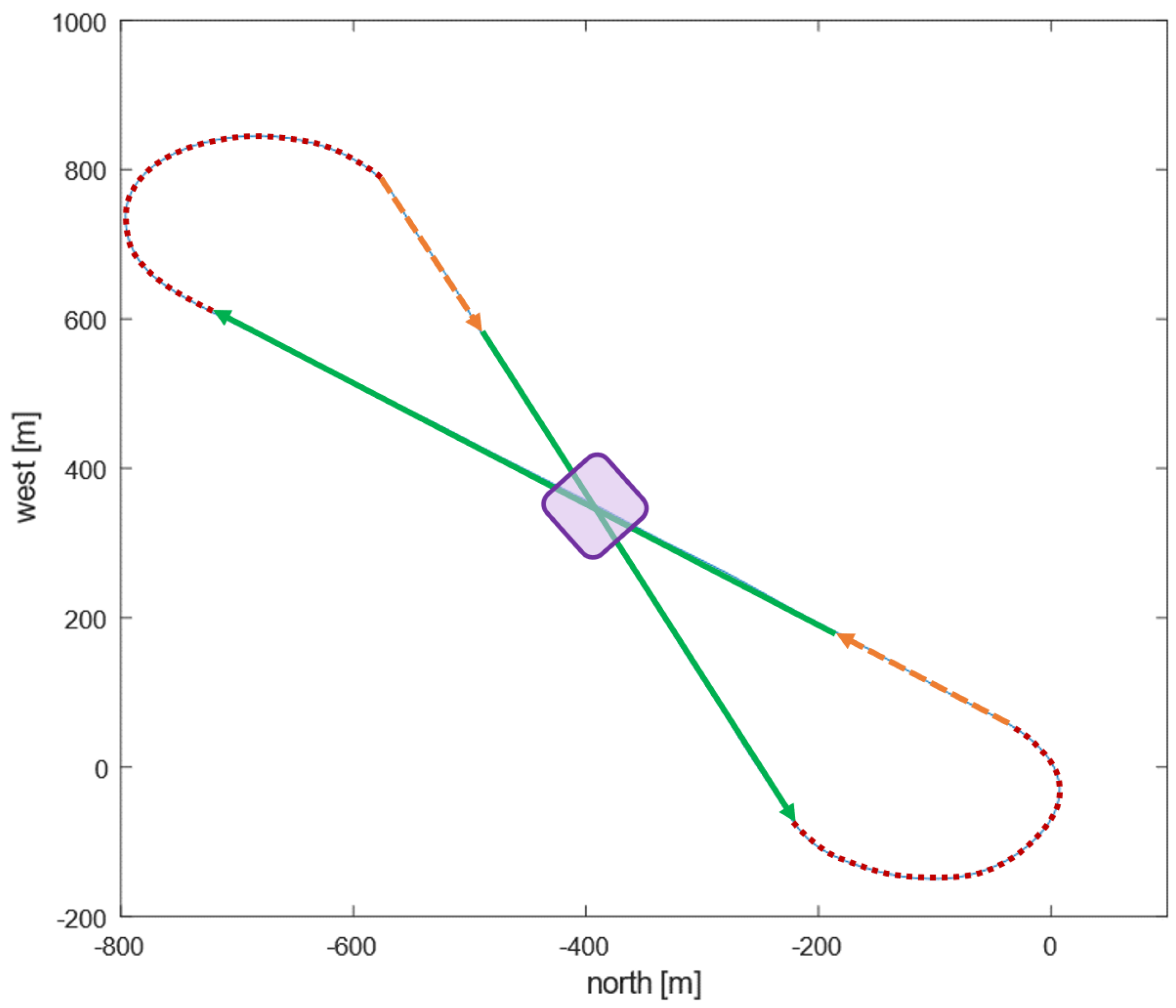
2.1. Flight Campaign
2.2. Onboard Measurement Equipment
2.2.1. MHP (Five-Hole Probe)
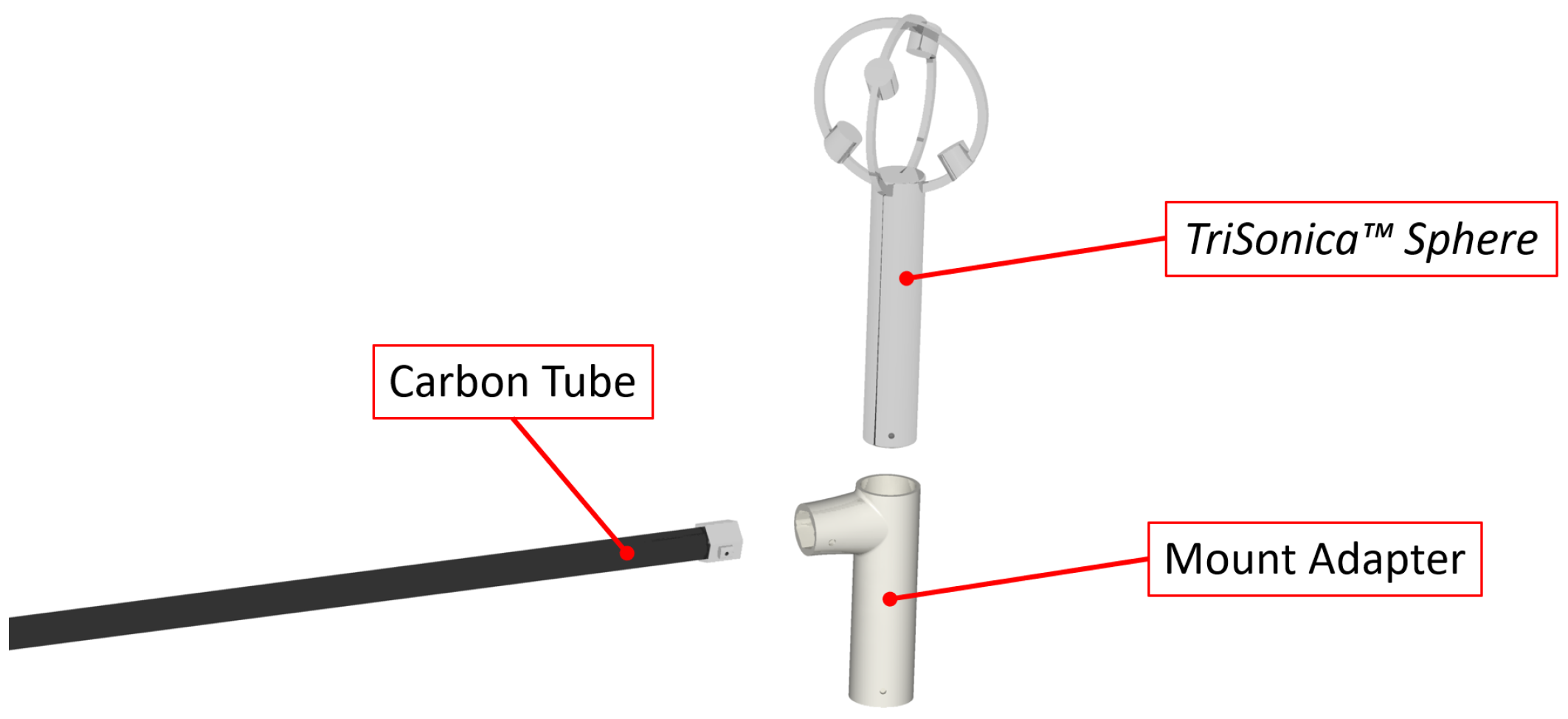
2.2.2. Reference Measurement Device
- Sufficient accuracy;
- Small size;
- Light weight;
- High robustness;
- Efficient power consumption;
- Availability.
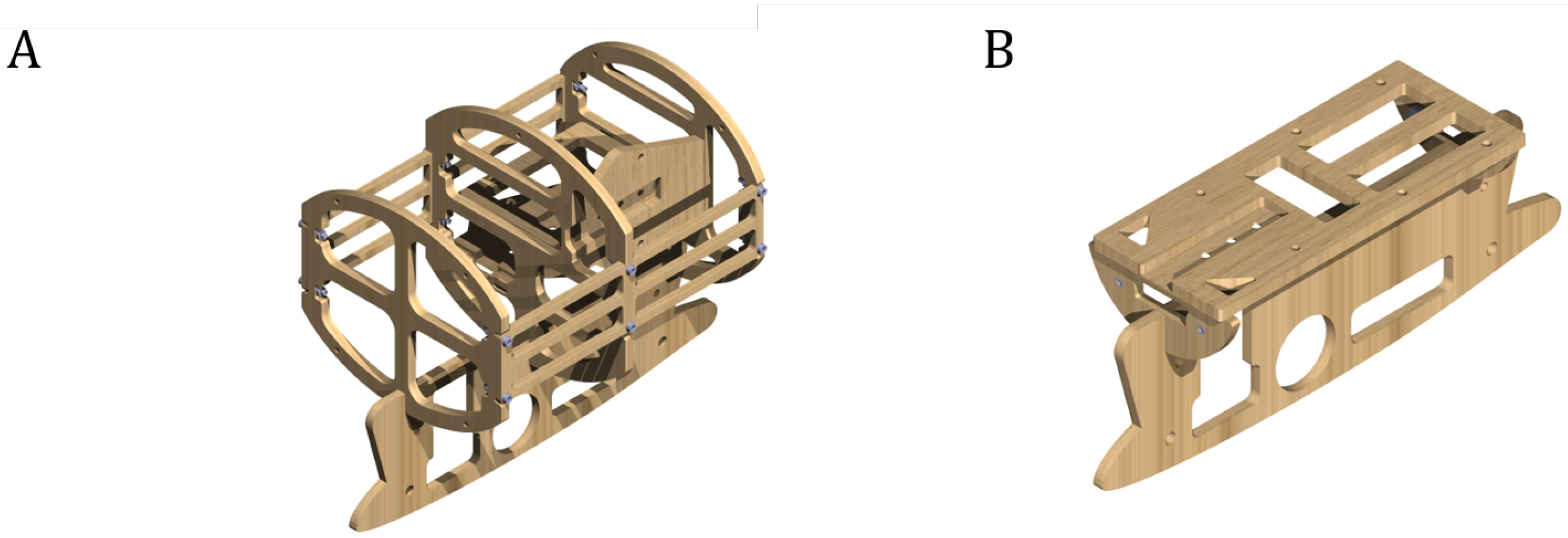
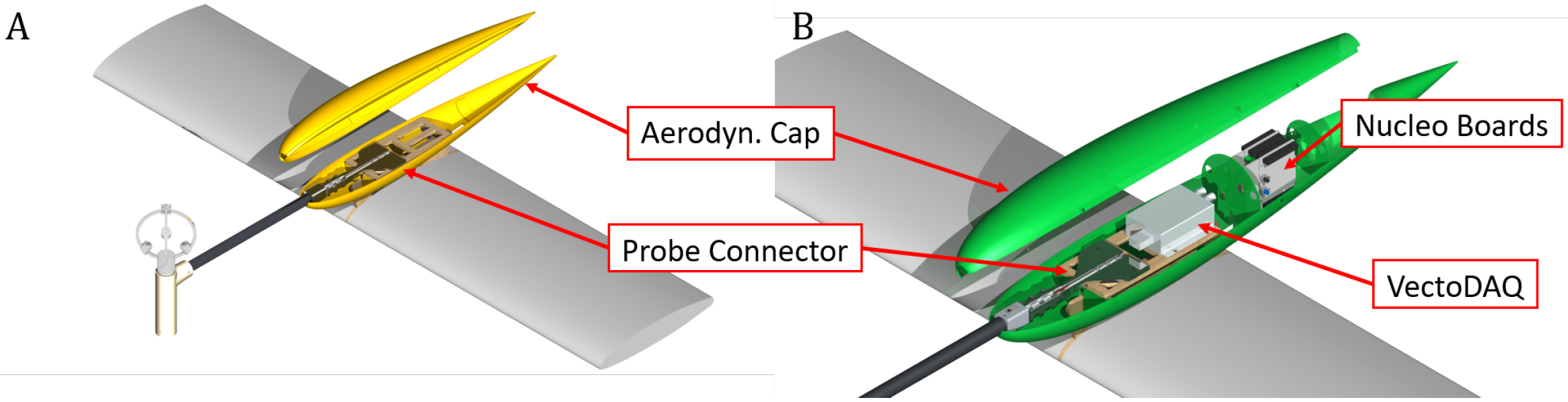
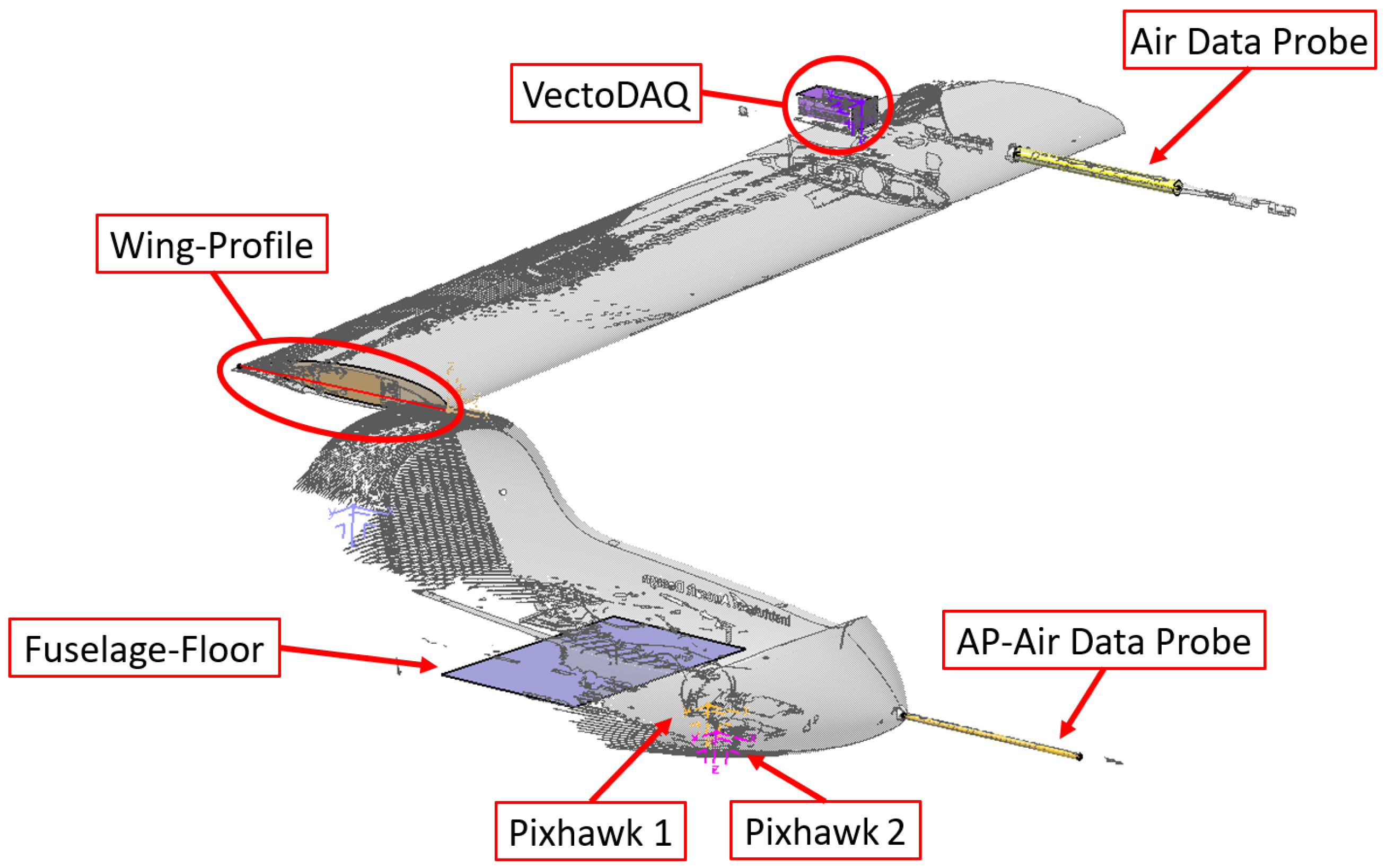
2.3. Installation Onboard the e-Genius-Mod
2.3.1. Single-Adapter Concept
2.3.2. Double-Adapter Concept
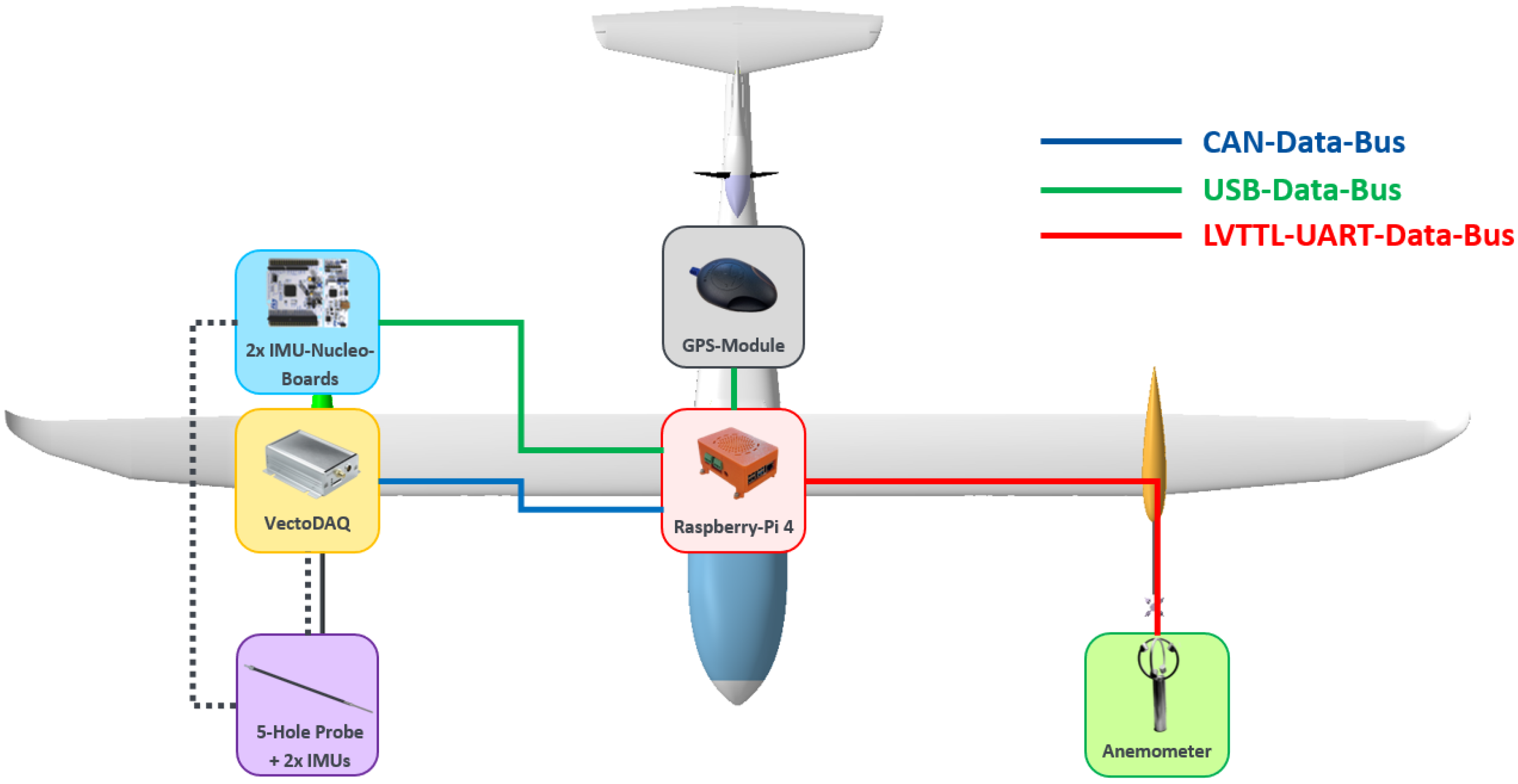
2.3.3. Measurement System Architecture
3. System Verification
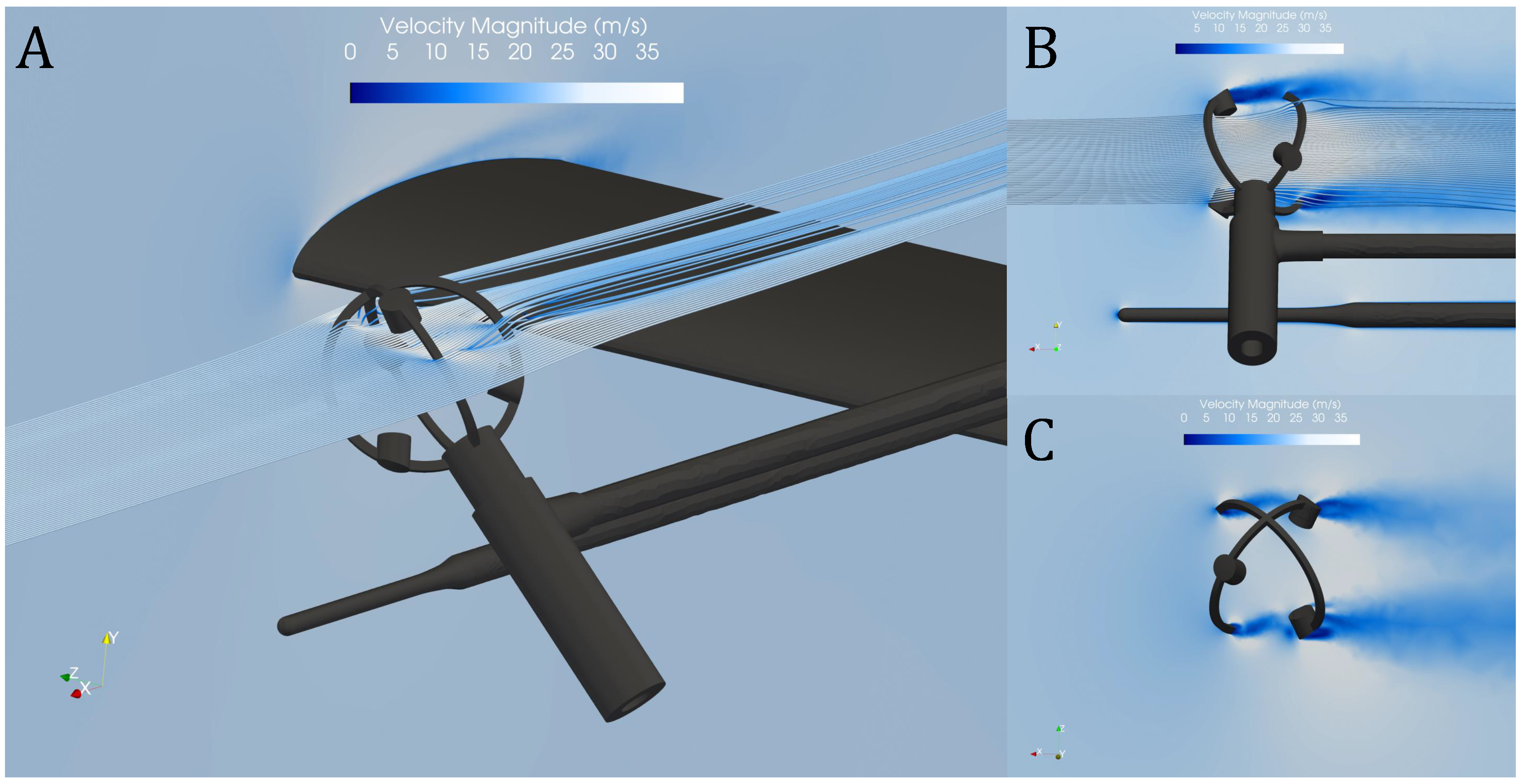
3.1. CFD Simulations
3.1.1. Grid Generation and Setup
3.1.2. Results and Discussion
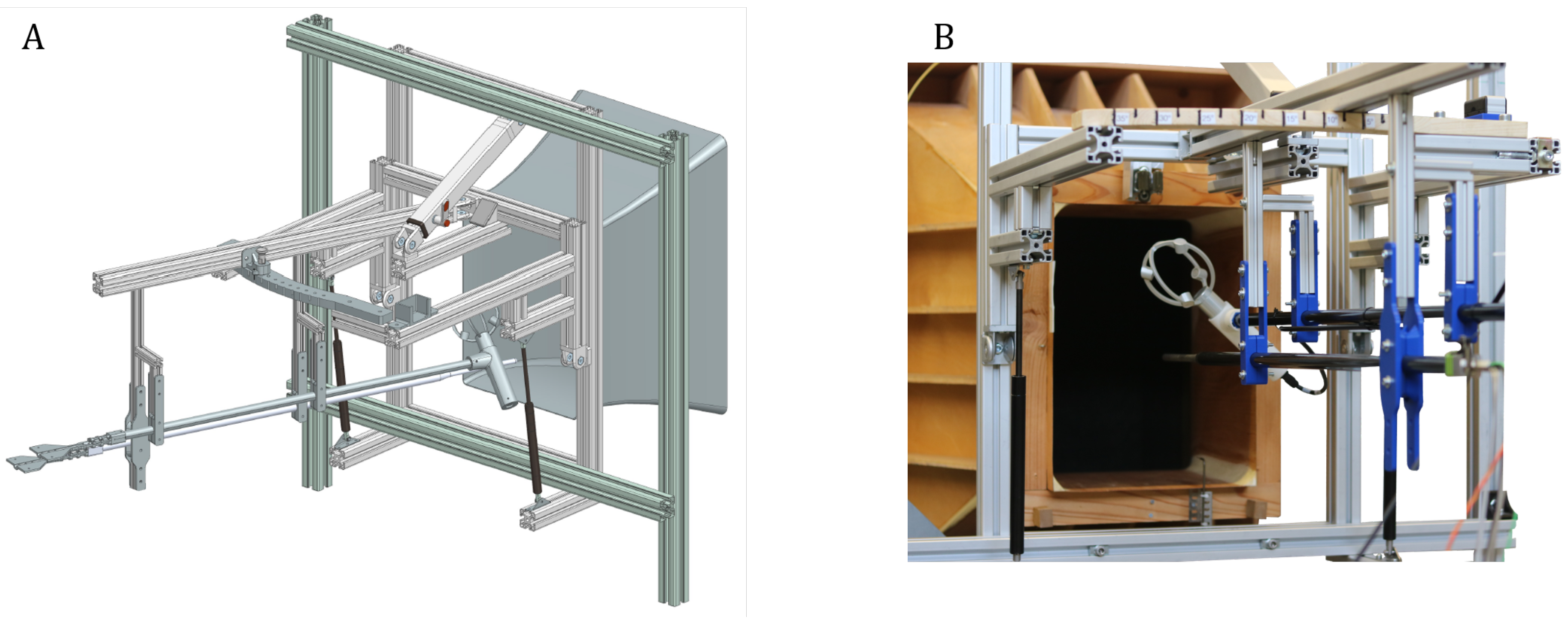
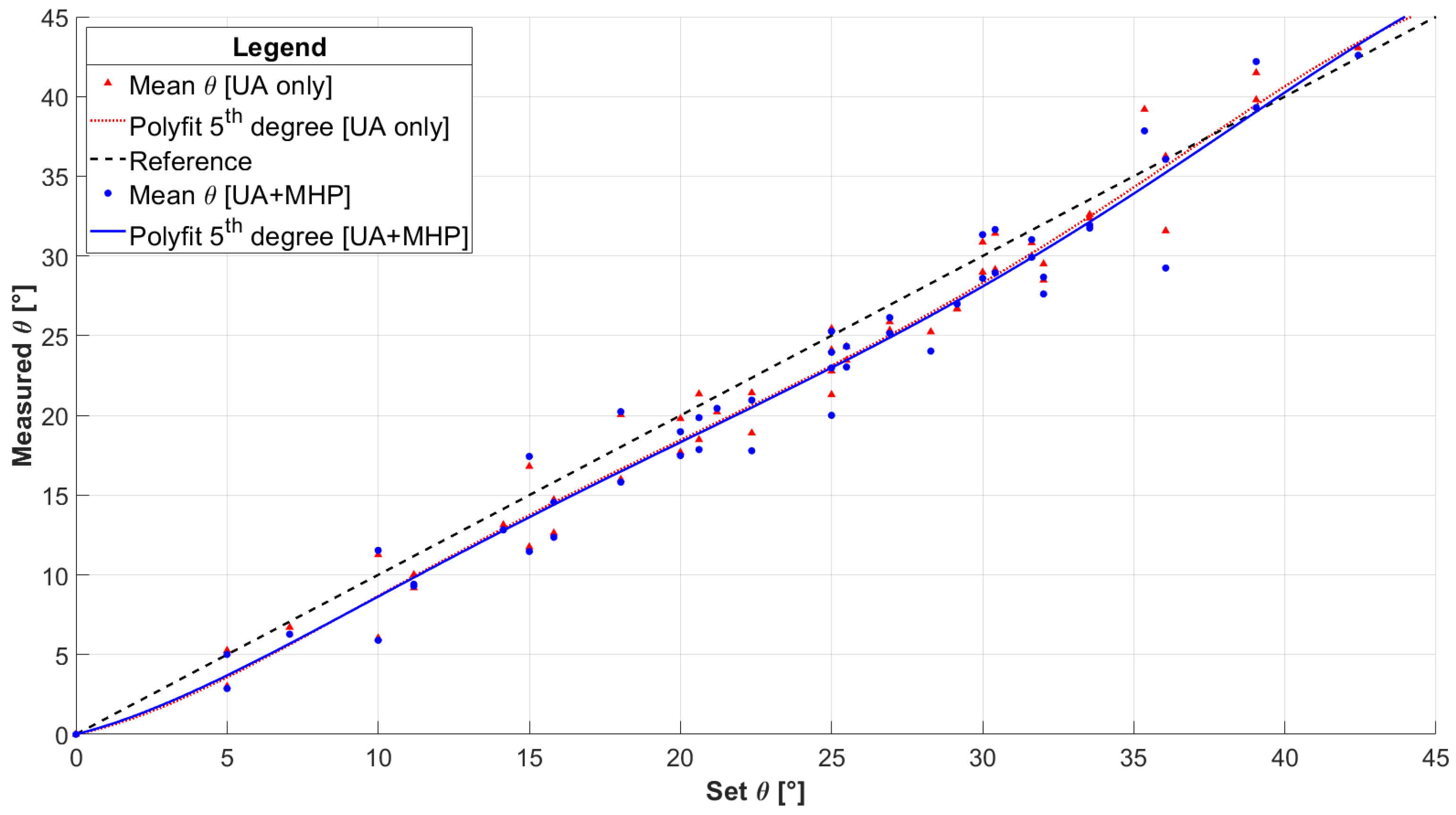
3.2. Wind-Tunnel Tests
- Only the MHP;
- Only the UA;
- Both MHP and UA.
3.3. Measurement of Installation Position
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADP | Air Data Probe |
| BWB | Blended Wing Body |
| CAD | Computer-Aided Design |
| CAN | Controller Area Network |
| CFD | Computational Fluid Dynamics |
| DEP | Distributed Electric Propulsion |
| EIA | Electronic Industries Association |
| GPS | Global Positioning System |
| IAG | Institut für Aerodynamik und Gasdynamik/Institute of Aerodynamics and Gas Dynamics |
| IEP | Innovative Evaluation Platform |
| IFB | Institut für Flugzeugbau/Institute of Aircraft Design |
| IMU | Inertial Measurement Unit |
| LIDAR | Light Detection and Ranging |
| LVTTL | Low-Voltage Transistor–Transistor Logic |
| MHP | Multi-Hole Probe |
| MTOM | Maximum Take-Off Mass |
| NACA | National Advisory Committee for Aeronautics |
| NASA | National Aeronautics and Space Administration |
| PETG | Polyethylene Terephthalate Glycol |
| SFD | Scaled Flight Demonstrator |
| SLS | Selective Laser Sintering |
| SWE | Stuttgart Wind Energy |
| TAS | True Air Speed |
| TRL | Technology Readiness Level |
| UA | Ultrasonic Anemometer |
| UART | Universal Asynchronous Receiver Transmitter |
| UAV | Unmanned Aerial Vehicle |
| USB | Universal Serial Bus |
References
- Chambers, J.R. Modeling Flight: The Role of Dynamically Scaled Free-Flight Models in Support of NASA’s Aerospace Programs; NASA: Washington, DC, USA, 2010.
- Torenbeek, E. Synthesis of Subsonic Airplane Design: An Introduction to the Preliminary Design of Subsonic General Aviation and Transport Aircraft, with Emphasis on Layout, Aerodynamic Design, Propulsion and Performance, 1st ed.; 8. repr ed.; Kluwer Academic Publ: Dordrecht, The Netherlands, 1982. [Google Scholar]
- Raymer, D.P. Aircraft Design: A Conceptual Approach, 5th ed.; AIAA Education Series; AIAA American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012. [Google Scholar]
- Roskam, J. Preliminary Sizing of Airplanes, 4th ed.; Airplane Design/Jan Roskam; DARcorporation: Lawrence, KS, USA, 2005; Volume Part I. [Google Scholar]
- Sobron, A.; Lundström, D.; Krus, P. A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical Challenges. Aerospace 2021, 8, 74. [Google Scholar] [CrossRef]
- Taufik, N.Z.B.; Zaidaan, S.; Mahmoud, E.; Abdallah, A.M.; Manaa, Z.; Abro, G.E.M.; Taib, M.N. Design and Analysis of the Effect of Trimmable Vertical Stabilizers for Enhanced Aircraft Maneuverability and Directional Stability. In Proceedings of the 2024 IEEE 12th Conference on Systems, Process & Control (ICSPC), Malacca, Malaysia, 7 December 2024; IEEE: New York, NY, USA, 2024; pp. 251–256. [Google Scholar] [CrossRef]
- Fujii, K. Progress and future prospects of CFD in aerospace—Wind tunnel and beyond. Prog. Aerosp. Sci. 2005, 41, 455–470. [Google Scholar] [CrossRef]
- Zhu, W. Models for wind tunnel tests based on additive manufacturing technology. Prog. Aerosp. Sci. 2019, 110, 100541. [Google Scholar] [CrossRef]
- Xiang, H.; Li, Y.; Chen, S.; Li, C. A wind tunnel test method on aerodynamic characteristics of moving vehicles under crosswinds. J. Wind Eng. Ind. Aerodyn. 2017, 163, 15–23. [Google Scholar] [CrossRef]
- Risch, T.; Cosentino, G.; Regan, C.; Kisska, M.; Princen, N. X-48B Flight-Test Progress Overview. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Schmollgruber, P.; Toussaint, C.; Lepage, A.; Bremmers, F.; Jentink, H.; Timmermans, L.; Genito, N.; Rispoli, A.; Meissner, D.; Kierbel, D. Validation of scaled flight testing. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Bergmann, D.P.; Denzel, J.; Baden, A.; Kugler, L.; Strohmayer, A. Innovative Scaled Test Platform e-Genius-Mod—Scaling Methods and Systems Design. Aerospace 2019, 6, 20. [Google Scholar] [CrossRef]
- Kittmann, K. Entwicklung Einer Modularen Messplattform zur Analyse des Potenzials von Freiflugmessungen; University Stuttgart: Stuttgart, Germany, 2013. [Google Scholar] [CrossRef]
- Dantsker, O.D.; Mancuso, R.; Ward, B.; Miller, C.; Shea, D.F.; Collins, K. Flight Testing Instrumentation Development and Integration for a Subscale Integrated High Lift Propulsor Testbed. In Proceedings of the AIAA SCITECH 2025 Forum, Orlando, FL, USA, 6–10 January 2025. [Google Scholar]
- Trittler, M.; Fichter, W.; Voit-Nitschmann, R.; Schmoldt, R.; Kittmann, K. Preliminary System Identification of the Blended Wing Body Flight Demonstrator VELA 2 from Flight Data. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef]
- Goraj, Z.; Kitmann, K.; Voit-Nitschmann, R.; Szender, M. Design and integration of flexi-bird-a low cost sub-scale research aircraft for safety and environmental issues. In Proceedings of the 27th International Congress of the Aeronautrical Science, Nice, France, 19–24 September 2010. [Google Scholar]
- Pfeifle, O.; Notter, S.; Fichter, W.; Paul Bergmann, D.; Denzel, J.; Strohmayer, A. Verifying the Effect of Wingtip Propellers on Drag Through In-Flight Measurements. J. Aircr. 2022, 59, 474–483. [Google Scholar] [CrossRef]
- Bergmann, D.; Denzel, J.; Pfeifle, O.; Notter, S.; Fichter, W.; Strohmayer, A. In-flight Lift and Drag Estimation of an Unmanned Propeller-Driven Aircraft. Aerospace 2021, 8, 43. [Google Scholar] [CrossRef]
- Pfeifle, O.; Fichter, W.; Bergmann, D.; Denzel, J.; Strohmayer, A.; Schollenberger, M.; Lutz, T. Precision performance measurements of fixed-wing aircraft with wing tip propellers. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Anemoment LLC. TriSonica Mini Wind & Weather Sensor; Anemoment LLC: Longmont, CO, USA, 2022. [Google Scholar]
- Anemoment LLC. TriSonica Sphere Wind Flux Sensor; Anemoment LLC: Longmont, CO, USA, 2022. [Google Scholar]
- Bolle, S. Design of a Reference Measurement System for In-Flight Validation of an Air Data Probe for Free-Flight Measurements. Bachelor’s Thesis, University of Stuttgart, Stuttgart, Germany, 2023. [Google Scholar]
- Streit, H. Design of a Wind Tunnel Test Bed for the Validation of a Free-Flight Measurement System. Bachelor’s Thesis, University of Stuttgart, Stuttgart, Germany, 2024. [Google Scholar]
- LI-COR Inc. LI-560 Instruction Manual; LI-COR Inc.: Lincoln, NE, USA, 2024. [Google Scholar]





| Method | Strengths | Limitations | Examples |
|---|---|---|---|
| Textbook Methods | - Simple usability | - Few or no unconventional designs available | [2,3,4] |
| - Covers most conventional designs | - Analytical approach based on pre-existing aircraft | ||
| - Satisfactory results for conventional designs | - Mostly for preliminary design stages only | ||
| Simulations | - Cost-effective | - Long computational results for high-fidelity models | [6,7] |
| - High-quality results possible | - Validation required | ||
| - High number of tests possible | - Not all flight conditions replicable | ||
| Wind-tunnel testing | - Reproducibility | - Limited availability | [8,9] |
| - Controlled test environment | - High costs | ||
| - Well-known method | - Limited number of possible flight condition replications | ||
| SFD | - Cost-effective | - Not all components are scalable | [10,11,12,13,14] |
| - Testing in realistic environment | - Uncontrolled atmospheric conditions (Limited reproducibility) | ||
| - Less risk compared to full-scaled aircraft | - Limits in transferability of results | ||
| - Quick design changes | - Weather dependency |
| Unit | Variable | Description |
|---|---|---|
| VectoDAQ | P1–P5 | Pressure at holes #1–5 |
| Pabs | Absolute pressure | |
| Ttc | Temperature | |
| Angle of attack | ||
| Sideslip angle | ||
| Vmag | Velocity magnitude | |
| […] | […] | |
| IMU [Bosch BMI323] | AccX, AccY, AccZ | Acceleration in x, y, z direction |
| by Bosch Sensortec GmbH (Reutlingen, Germany) | GyroX, GyroY, GyroZ | Angular velocity around x, y, z-axis |
| […] | […] |
| TriSonica™Mini [20] | TriSonica™Sphere [21] | |
|---|---|---|
| Size | 9.1 × 9.1 × | 10.2 × 10.2 × |
| Weight | ||
| Power | max. | max. |
| Measurement Range | 0– | 0– |
| Resolution | ||
| Accuracy | (0–) | (0–) |
| (11–) | (11–) | |
| (31–) | (31–) | |
| Wind Direction | 0– (u/v) | 0– (u/v) |
| (w) | (w) | |
| Accelerometer | No | Yes |
| Data Output Rate | 1– | 1– |
| Device | Communication Protocol |
|---|---|
| VectoDAQ | Controller Area Network (CAN) |
| Nucleo Board [STM Nucleo-F303RE] | CAN |
| by STMicroelectronics International N.V. | Universal Serial Bus (USB) |
| (Plan-les-Ouates, Switzerland) | |
| TriSonica™Sphere | Electronic Industries Association (EIA) 232 |
| EIA422 | |
| EIA485 | |
| LVTTL-UART 1 | |
| GPS-Module [NaviLock NL-602U] | USB |
| by Tragant Handels- und Beteiligungs GmbH (Berlin, Germany) |
| Grid Type | Number of Cells | ||
|---|---|---|---|
| Coarse | 3,409,968 | 0.1050 | 0.00243 |
| Medium | 6,819,935 | 0.1258 | 0.00260 |
| Fine | 27,279,740 | 0.1280 | 0.00264 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nussbaumer, E.J.; Hijazi, S.; Bergmann, D.P.; Streit, H.; Strohmayer, A. Development of a Modular Test Rig for In-Flight Validation of a Multi-Hole Probe Onboard the e-Genius-Mod. Aerospace 2025, 12, 345. https://doi.org/10.3390/aerospace12040345
Nussbaumer EJ, Hijazi S, Bergmann DP, Streit H, Strohmayer A. Development of a Modular Test Rig for In-Flight Validation of a Multi-Hole Probe Onboard the e-Genius-Mod. Aerospace. 2025; 12(4):345. https://doi.org/10.3390/aerospace12040345
Chicago/Turabian StyleNussbaumer, Eskil Jonas, Sara Hijazi, Dominique Paul Bergmann, Hanno Streit, and Andreas Strohmayer. 2025. "Development of a Modular Test Rig for In-Flight Validation of a Multi-Hole Probe Onboard the e-Genius-Mod" Aerospace 12, no. 4: 345. https://doi.org/10.3390/aerospace12040345
APA StyleNussbaumer, E. J., Hijazi, S., Bergmann, D. P., Streit, H., & Strohmayer, A. (2025). Development of a Modular Test Rig for In-Flight Validation of a Multi-Hole Probe Onboard the e-Genius-Mod. Aerospace, 12(4), 345. https://doi.org/10.3390/aerospace12040345