1. Introduction
Supersonic intakes represent a critical component of supersonic vehicles since they can strongly influence the performances of the engine [
1]. The flow field inside the intake is governed by strongly non-linear phenomena, like shock waves and turbulence. The interaction between shocks and boundary layers can lead to separations, which are responsible for large total pressure losses and unsteady phenomena which represent dangerous dynamic loads for the structure.
Furthermore, the growing interest in hypersonic flight leads to even more challenging scenarios in which the intake is subjected to extreme working conditions [
2]. In SCRAMJET engines, for example, the intake is used to decelerate the incoming hypersonic flow by means of oblique shock waves that can lead to dangerous shock–shock interactions in the vicinity of the engine cowling [
3]: this leads to very high heat fluxes through the intake structure.
Several research studies have been devoted to the design of supersonic intakes, with particular attention given to mixed-compression configurations. The typical goals that drive the design include total pressure recovery, uniformity of the flow, mass flow, spillage drag and cowl wave drag. In order to compromise between these objectives, several geometries were investigated. Some examples are represented by multiple ramps [
4,
5,
6], three-dimensional bumps [
7], combinations of ramps and cone [
8], combinations of wedges and smooth ramps [
9].
Another important feature that defines the quality of an intake is represented by its ability to maintain good performance in off-design conditions. This is a key point since the intake should be able to work from low speed sea level conditions to high speed altitude conditions. When the flight Mach number is changed, the shock structure in the inlet evolves. The interaction between shock waves and boundary layers can lead to large separations whose extension is strongly influenced by the working conditions.
In order to improve the off-design performances, several strategies can be adopted [
10]. Some passive control approaches can be adopted in order to limit the effects of the flight Mach number, like for example the use of cavities with porous surfaces [
11,
12,
13,
14]. Alternatively, several active control systems are available. A straightforward approach consists of using a variable geometry intake: this solution was, for example, adopted in the Concorde aircraft in which variable angle ramps were employed; this solution was also investigated for hypersonic vehicles [
15]. Shape-memory alloys were proposed for variable geometry ramps, both as actuators [
16] and shape morphing devices [
17].
Boundary layer bleed is another widely used active control strategy [
18]: the separation induced by shock–boundary layer interaction can be significantly reduced by removing air from a slot, a scoop or by means of distributed suction. This technique is very effective but introduces a bleed drag contribution, which can represent a significant contribution to the total vehicle drag.
Some studies were performed on the possibility of controlling the flow by an off-body energy addition [
19,
20]. Alternatively, several research efforts have been devoted to the development of plasma actuators in which the air close to the wall is locally ionized by an electrical discharge [
21,
22,
23,
24,
25,
26,
27]. This technology was also investigated for controlling flow separation in rocket nozzles for space launchers [
28]. In the experimental work performed by Falempin et al. [
25] a quasi-direct current discharge is applied on the wall in front of a double wedge inlet ramp in off-design conditions: the activation of the plasma actuator generates a perturbation in the flow which is able to steer the leading edge shock wave in order to improve performances in off-design conditions. The experimental study was followed by a computational fluid dynamics (CFD) analysis in which the effects of the plasma actuator are reproduced by introducing a volumetric heat source close to the wall.
In the present work the flow inside a double wedge supersonic inlet was investigated by means of numerical simulations. After the first validation and comparison with the available experimental results at Mach number , two off-design working conditions ( and ) were considered. Since the uncontrolled flow shows large separations, a study on the potential improvements obtained by introducing a plasma actuator eventually supported by a bleed system was performed. Several locations of the plasma actuator were investigated and the performances in terms of total pressure recovery, flow distortion and power consumption are provided.
3. Numerical Discretization
The governing equations are discretized by means of an unstructured solver which is based on the method of lines: a finite volume discretization is adopted in space while time integration is performed by means of the linearized implicit Euler scheme. The solver, which can be use in both finite volume or discontinuous Galerkin mode, has been verified and validated on compressible inviscid flows [
42,
43], laminar flows [
44] and turbulent flows [
45,
46,
47,
48,
49,
50].
The convective terms are computed by the AUSM+ scheme [
51] combined with a second order accurate reconstruction obtained by the application of the Barth–Jespersen limiter [
52]. The gradients required by the viscous fluxes and source terms are evaluated by means of a weighted least squares approach. The parallelization in the message passing interface environment is managed through the DMPlex class [
53] provided by the PETSc library [
54].
The computational domain is discretized with a mixed structured–unstructured mesh by Gmsh [
55]: a structured mesh in the boundary layer region is surrounded by an unstructured mesh generated by the Frontal–Delaunay for the Quads algorithm [
56].
4. Inlet Geometry
A double wedge inlet followed by an isolator duct is considered in this work. The isolator consists of a nearly parallel walled duct that separates the inlet and the combustor of a dual-mode SCRAMJET: the purpose of the isolator is to provide a stable flow to the combustor for different working conditions [
57].
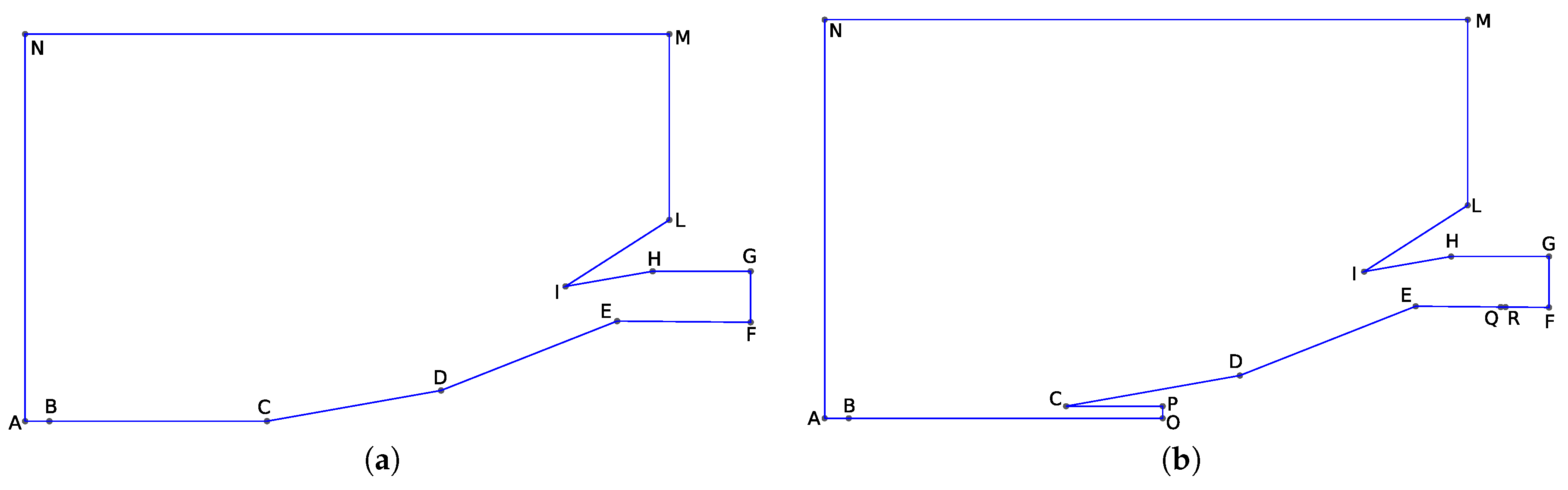
In particular, the geometry, which is identified as Model V-CC in the experimental work of [
58], is taken as reference. A scheme of this geometry is reported in
Figure 1a. The original setup studied by Schneider and Koschel [
58] did not allow us to simulate the incoming boundary layer generated by the forebody. In this work, several configurations were considered in order to simulate the ingestion of the incoming boundary layer and the presence of a diverter between the inlet and the fuselage. For this reason, two different geometric configurations (A and B) were considered and reported in
Figure 1. In particular, configuration B shows a diverter, which prevents the boundary layer on the fuselage, to be ingested in the intake: this is obtained by shifting the intake with respect to the fuselage. This last configuration is adopted in several aircraft [
1].
The coordinates of the points which define the geometries for the configurations A and B are reported in
Table 1 and
Table 2, respectively. All the coordinates are normalized with respect to the axial length of the configuration A (
mm). The boundary conditions for the different configurations are reported in
Table 3 and
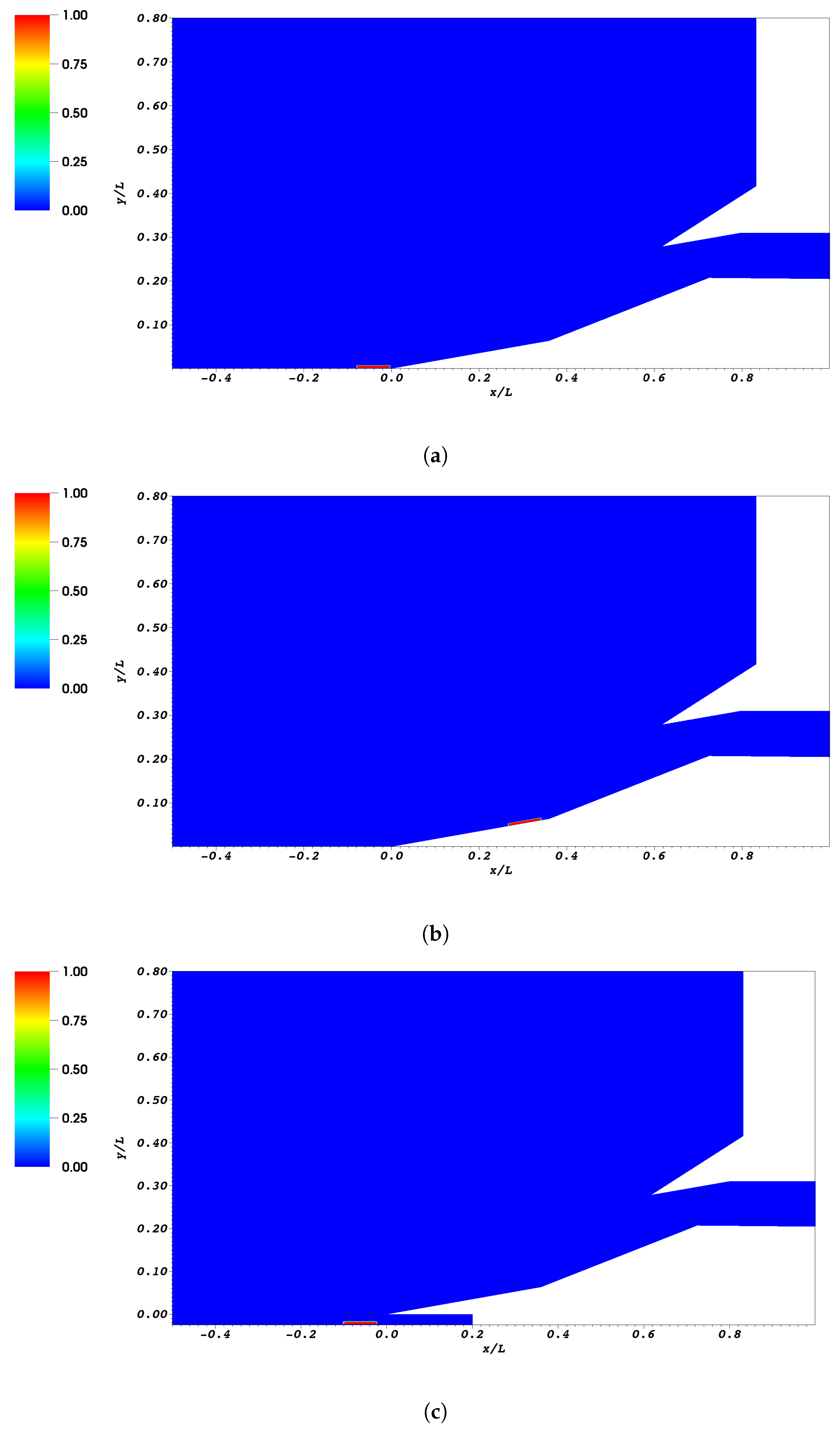
Table 4. While the walls of the wedges, lip and isolator are always described as solid walls (no slip adiabatic condition), the segment BC which appears in the configuration A can be assigned to both the symmetry or the solid wall boundary condition: in the first case there is no boundary layer ingestion, and in the second case it is possible to simulate an incoming boundary layer. This freedom makes it possible to evaluate different locations of the plasma actuator that are reported in
Figure 2, which shows the thermal source term related to the plasma actuator. In particular, three locations were investigated: the actuator in front of the first ramp shown in
Figure 2a (configuration A, segment BC is a solid wall), the actuator in front of the second ramp shown in
Figure 2b (configuration A, segment BC is a symmetry boundary) and the actautor on the fuselage
Figure 2c (configuration B with diverter).
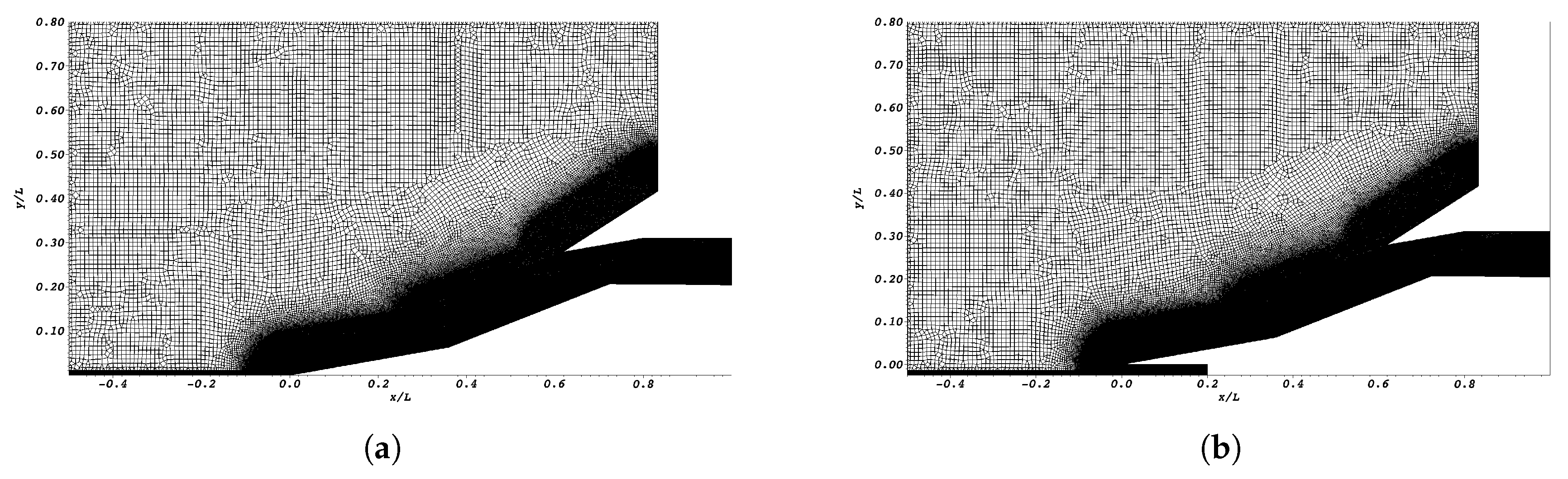
Finally, in
Figure 3 an example of meshes for the two configurations is reported: the mesh is unstructured with a structured region close to the walls. The size of the elements is controlled by means of attractors based on the distance from the walls.
5. Validation at
A preliminary study was performed on the double wedge inlet described by the configuration A with a symmetry boundary condition in the segment BC (see
Figure 1a): this means that there was no boundary layer ingestion and so the configuration was in line with the experimental setup described by [
58]. In order to validate the numerical approach the inlet was studied with a freestream Mach number
and a Reynolds number
. These working conditions correspond to the experimental conditions adopted in [
58]. The Reynolds number is here referring to the axial length of the first ramp (46.73 mm).
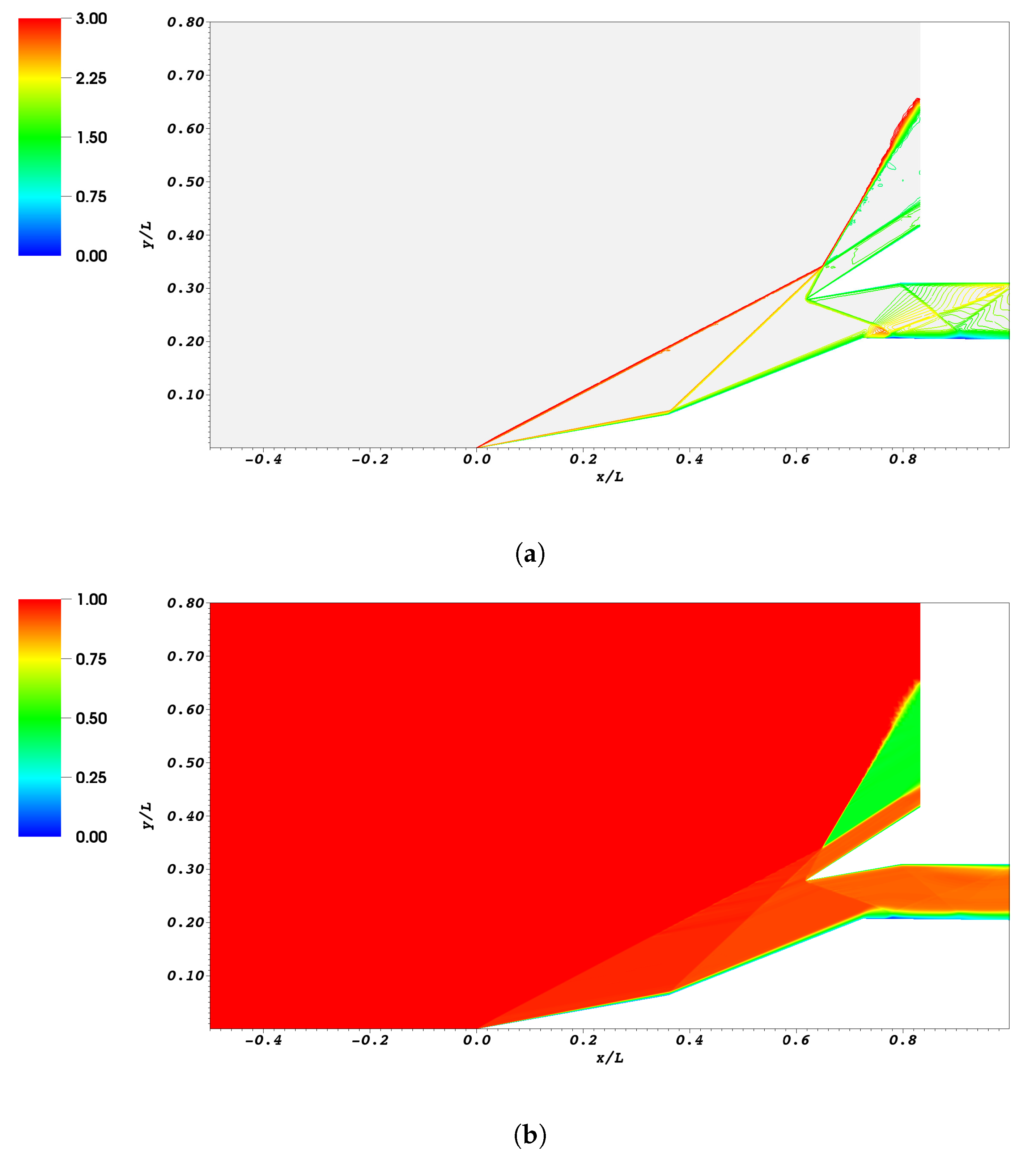
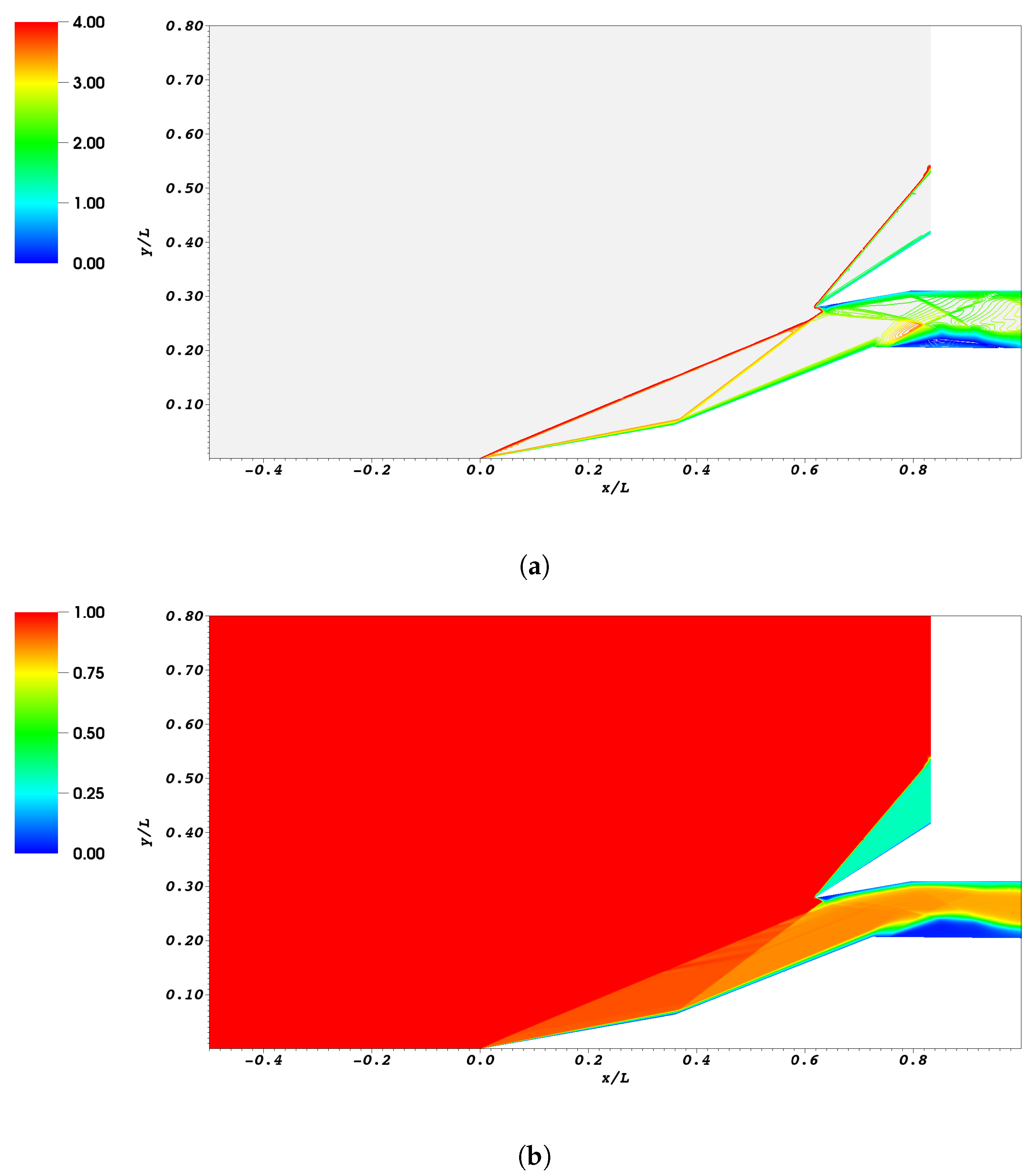
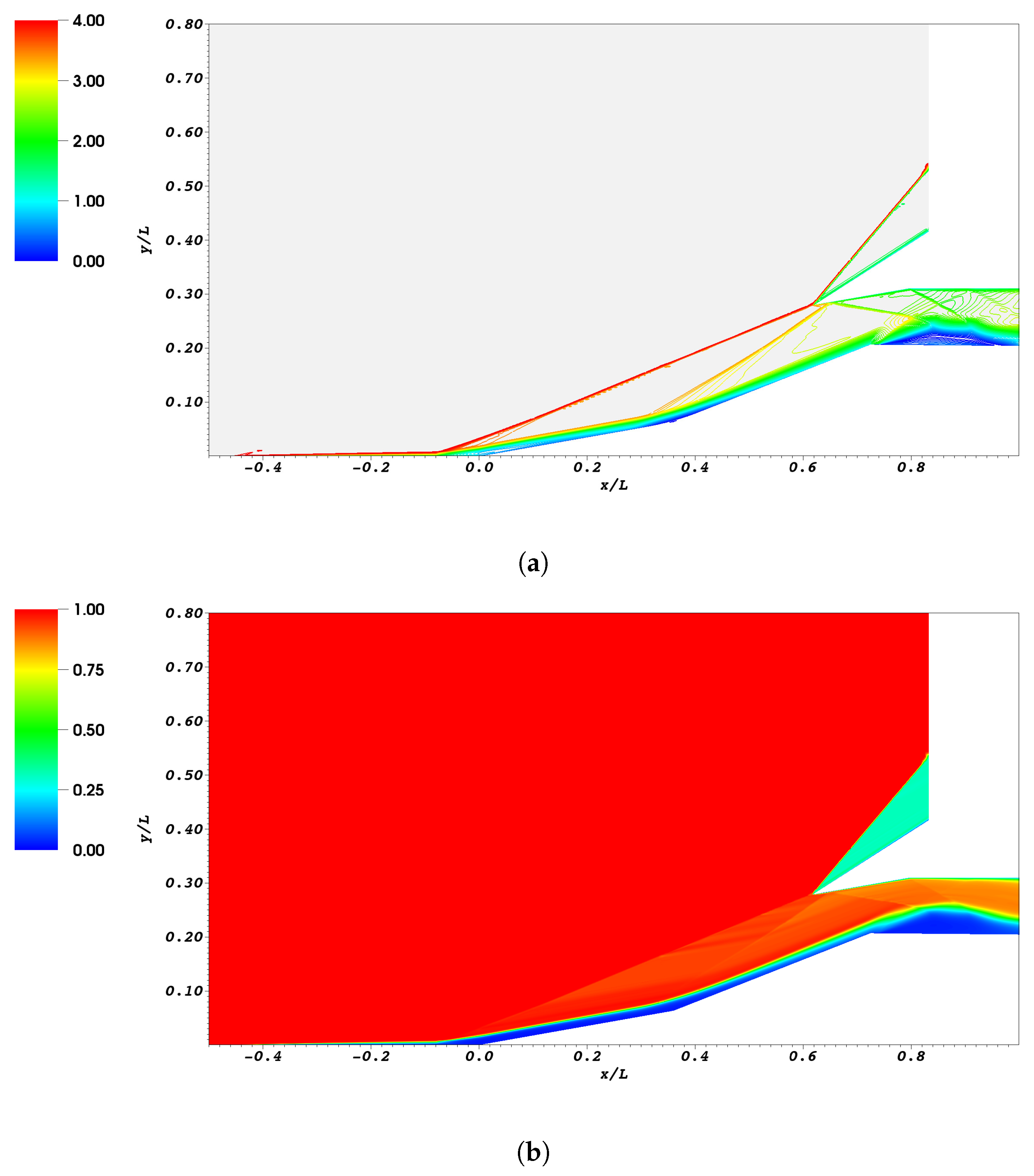
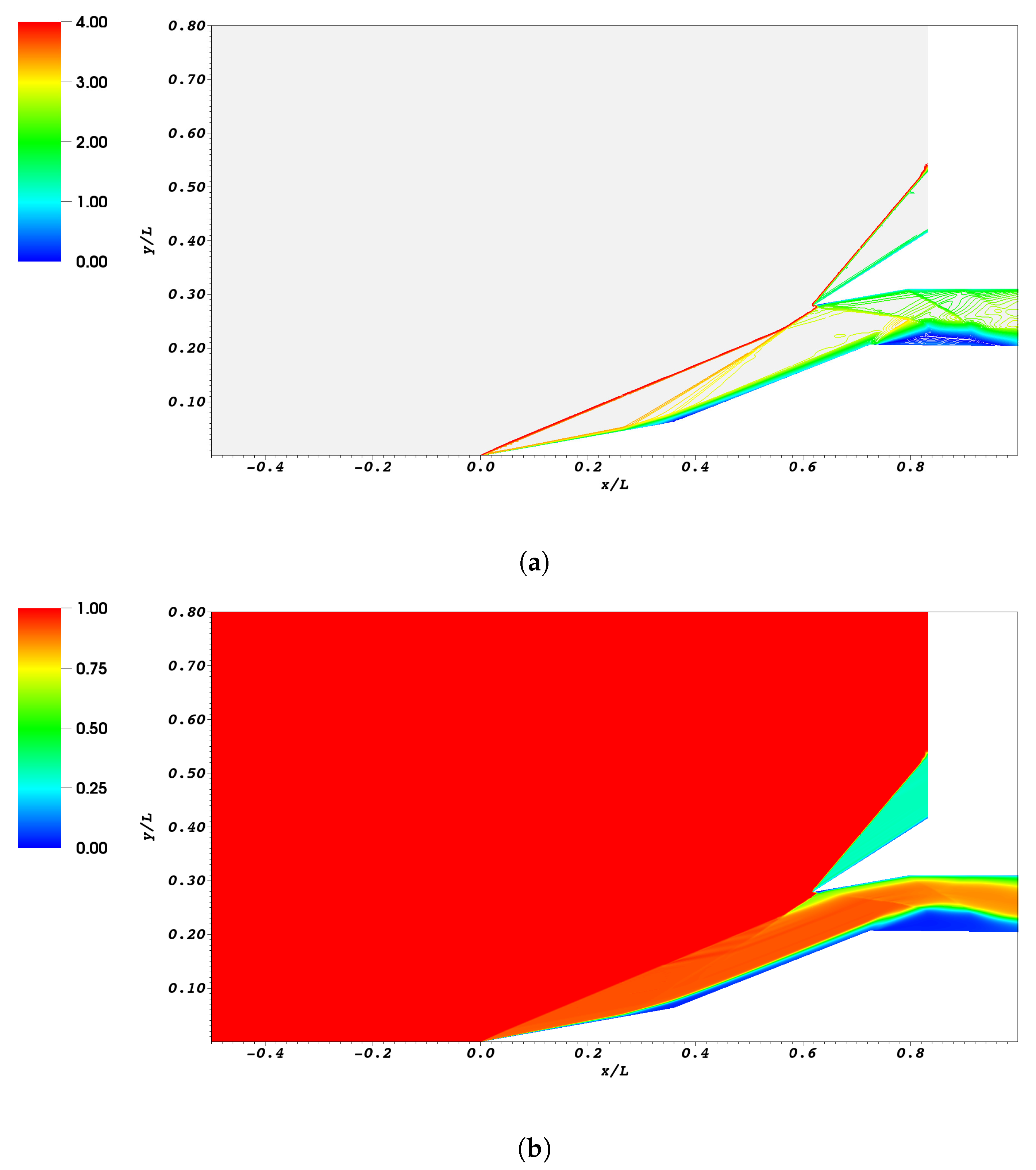
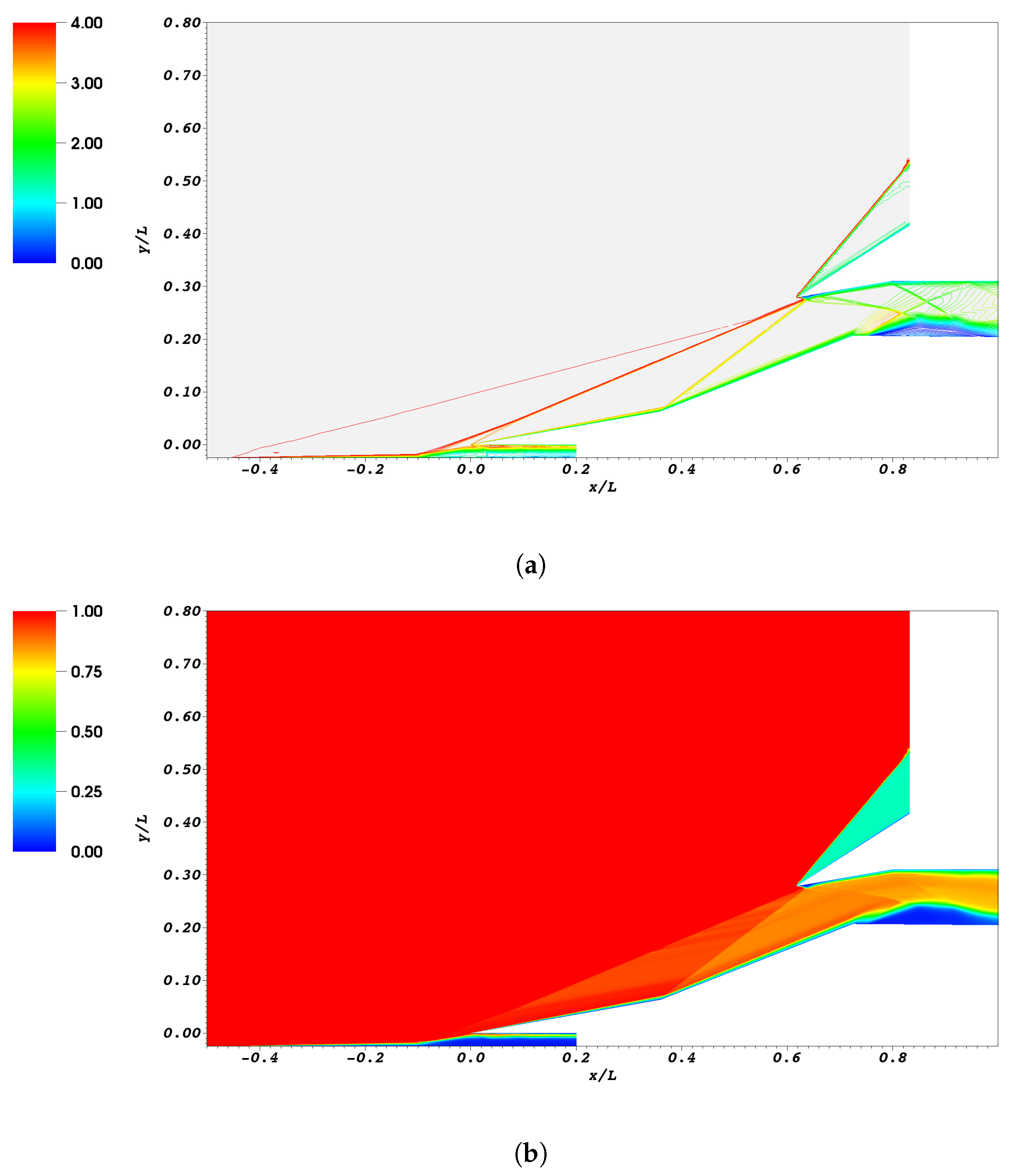
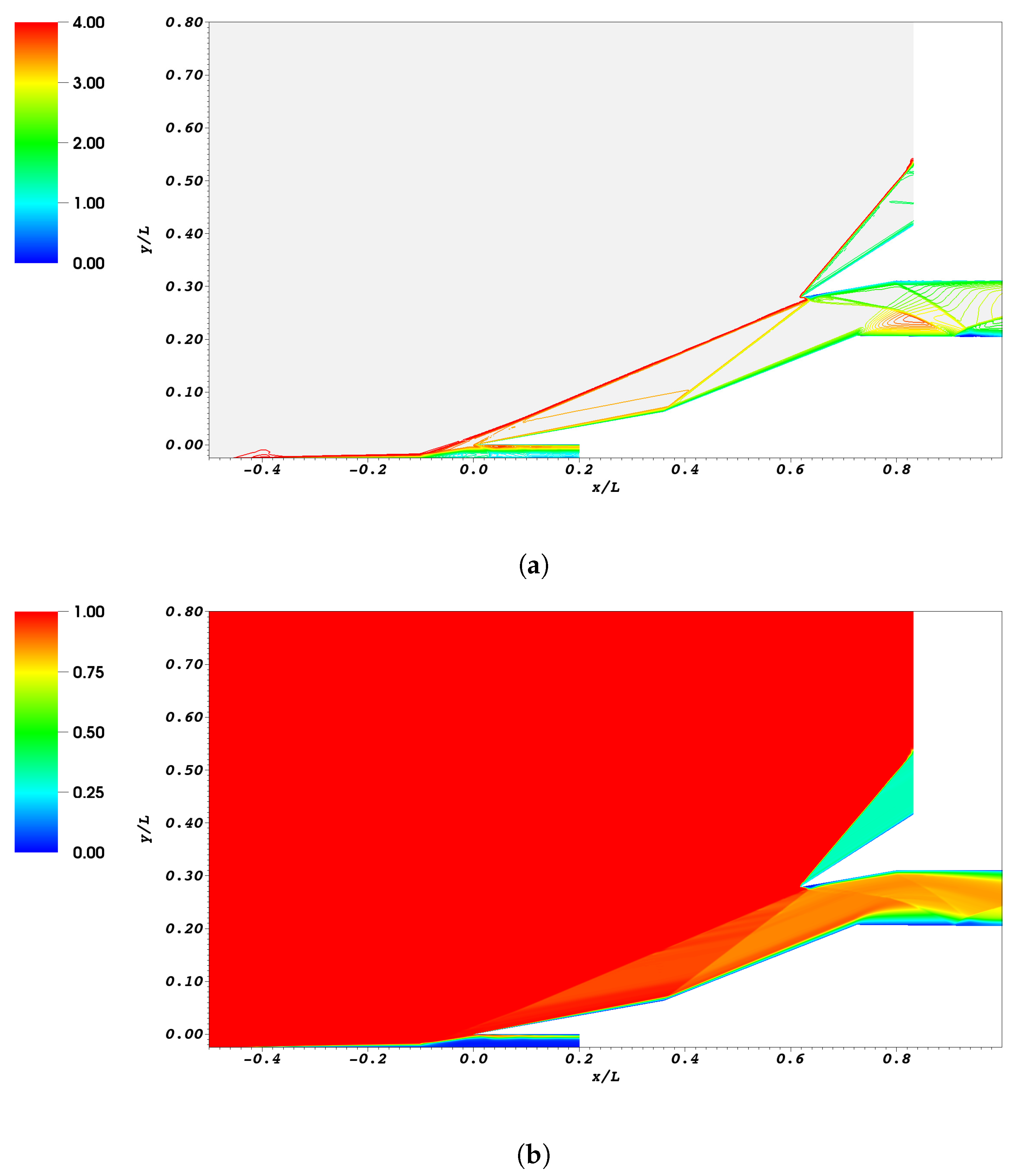
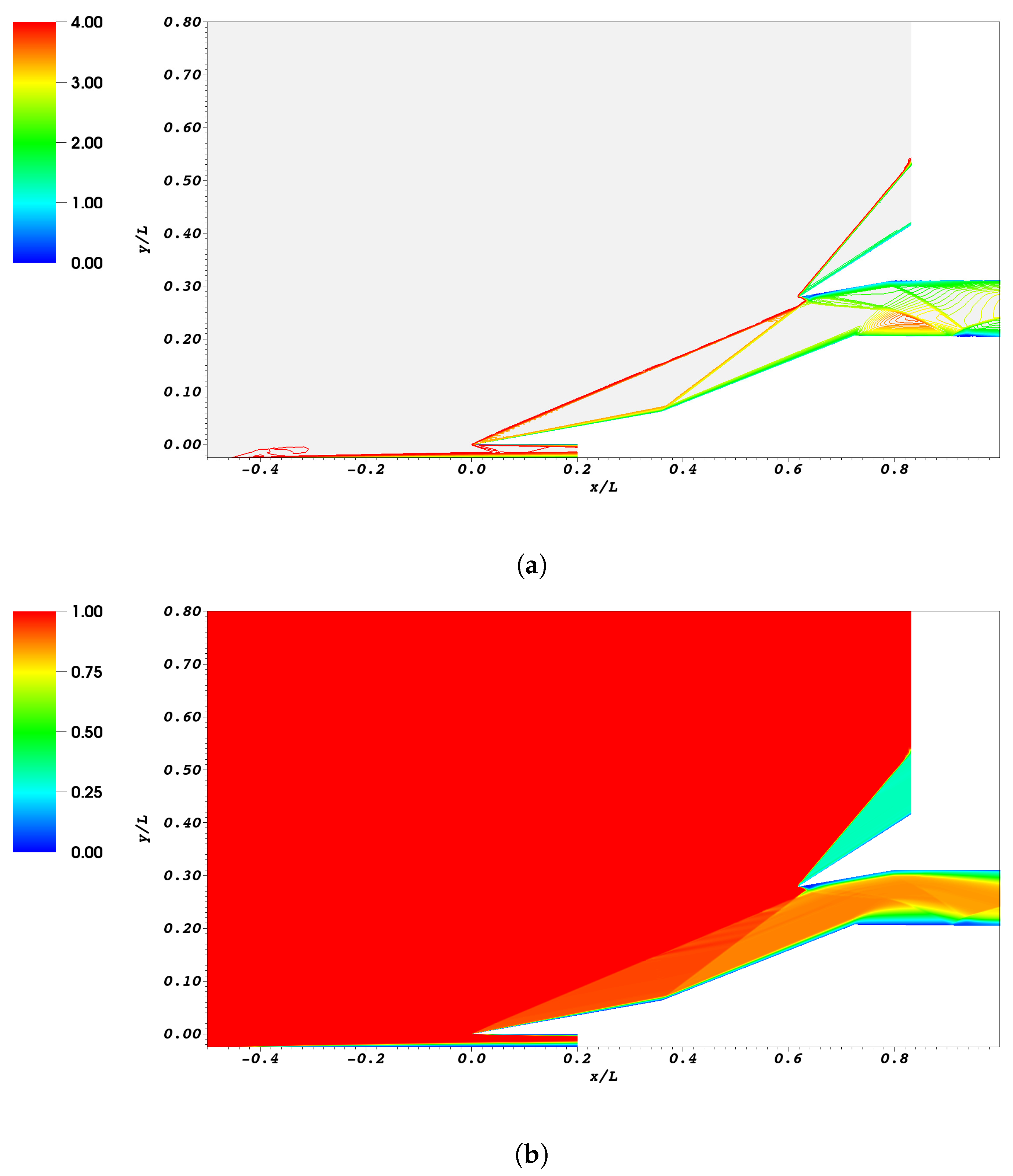
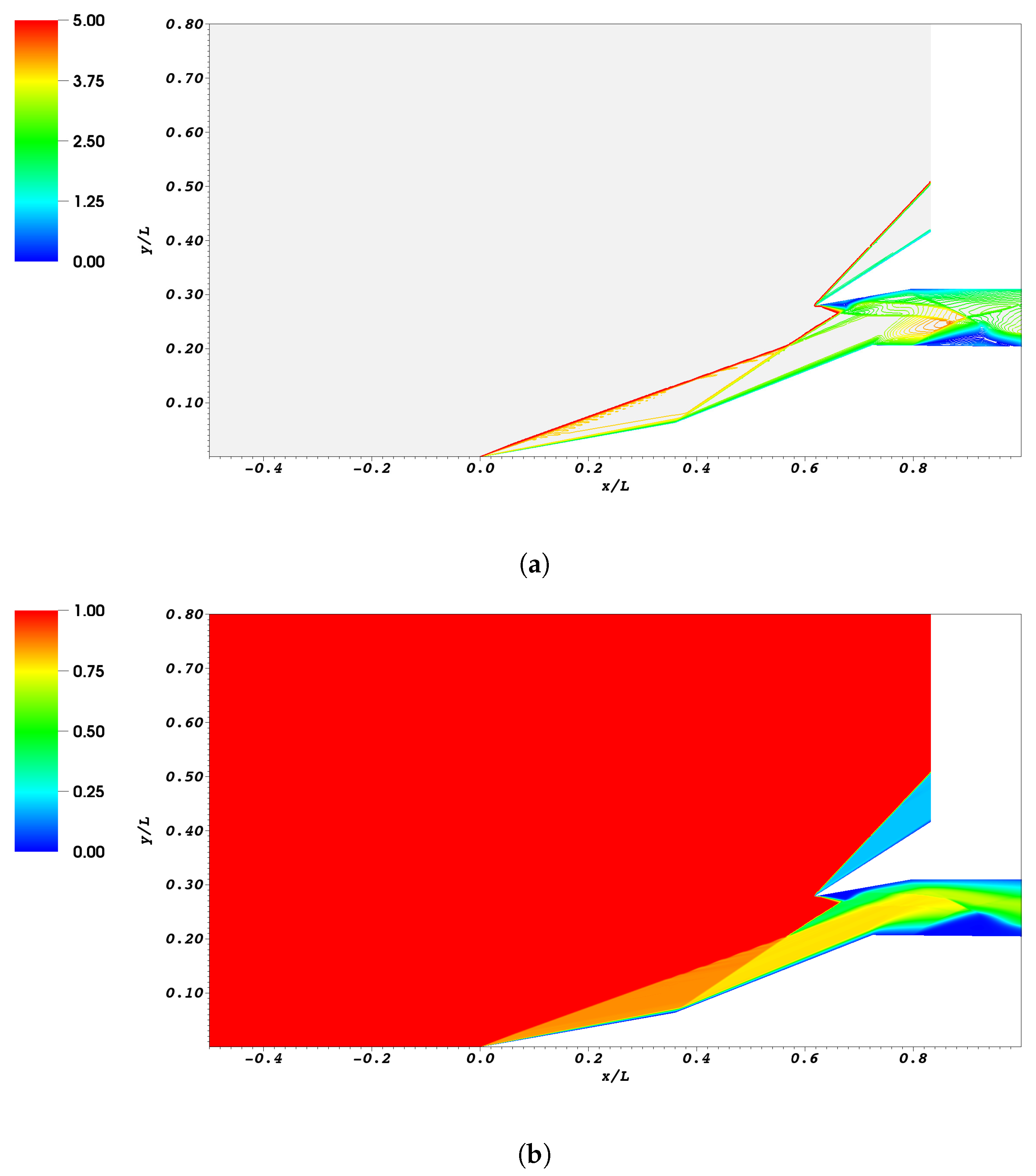
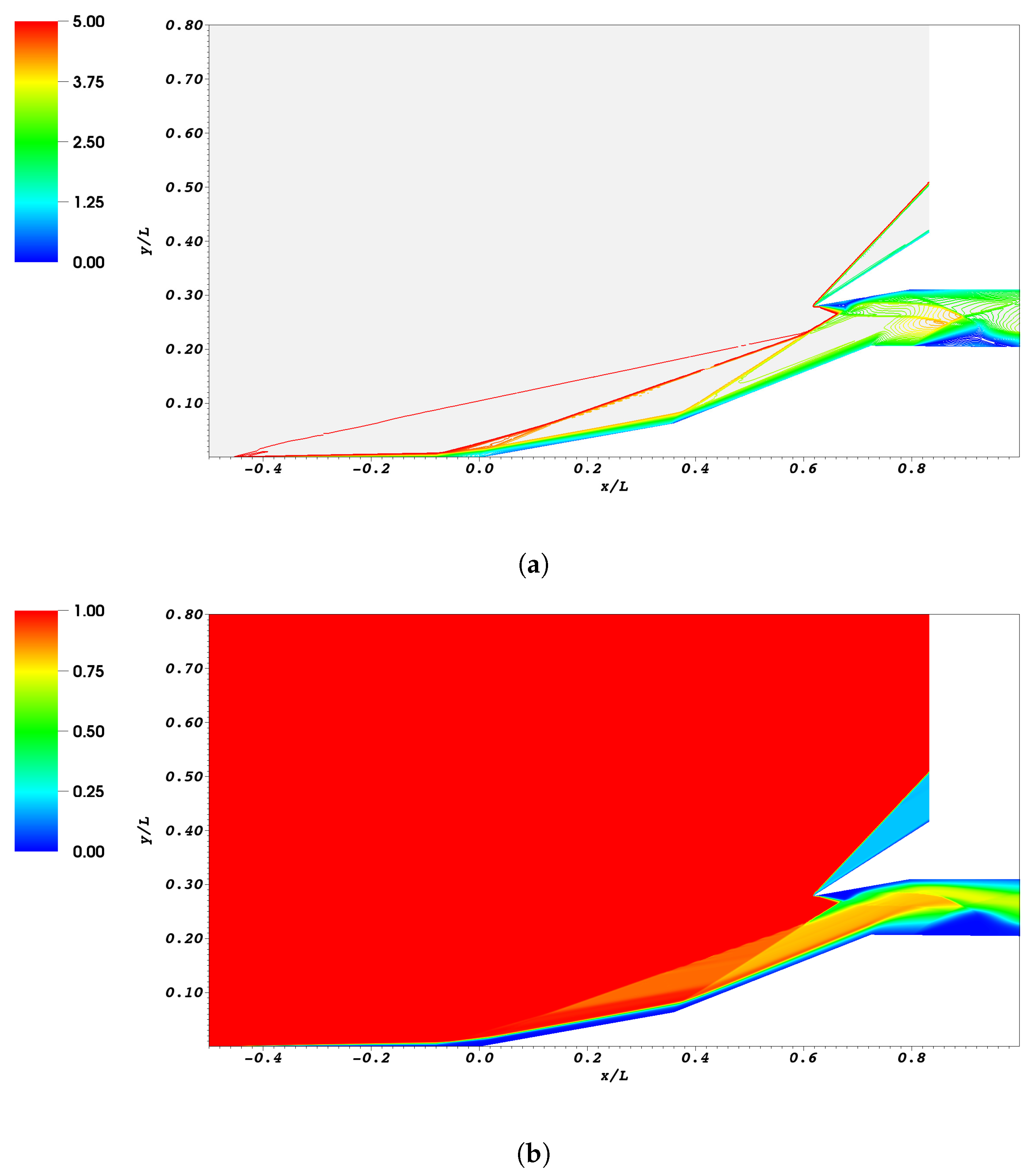
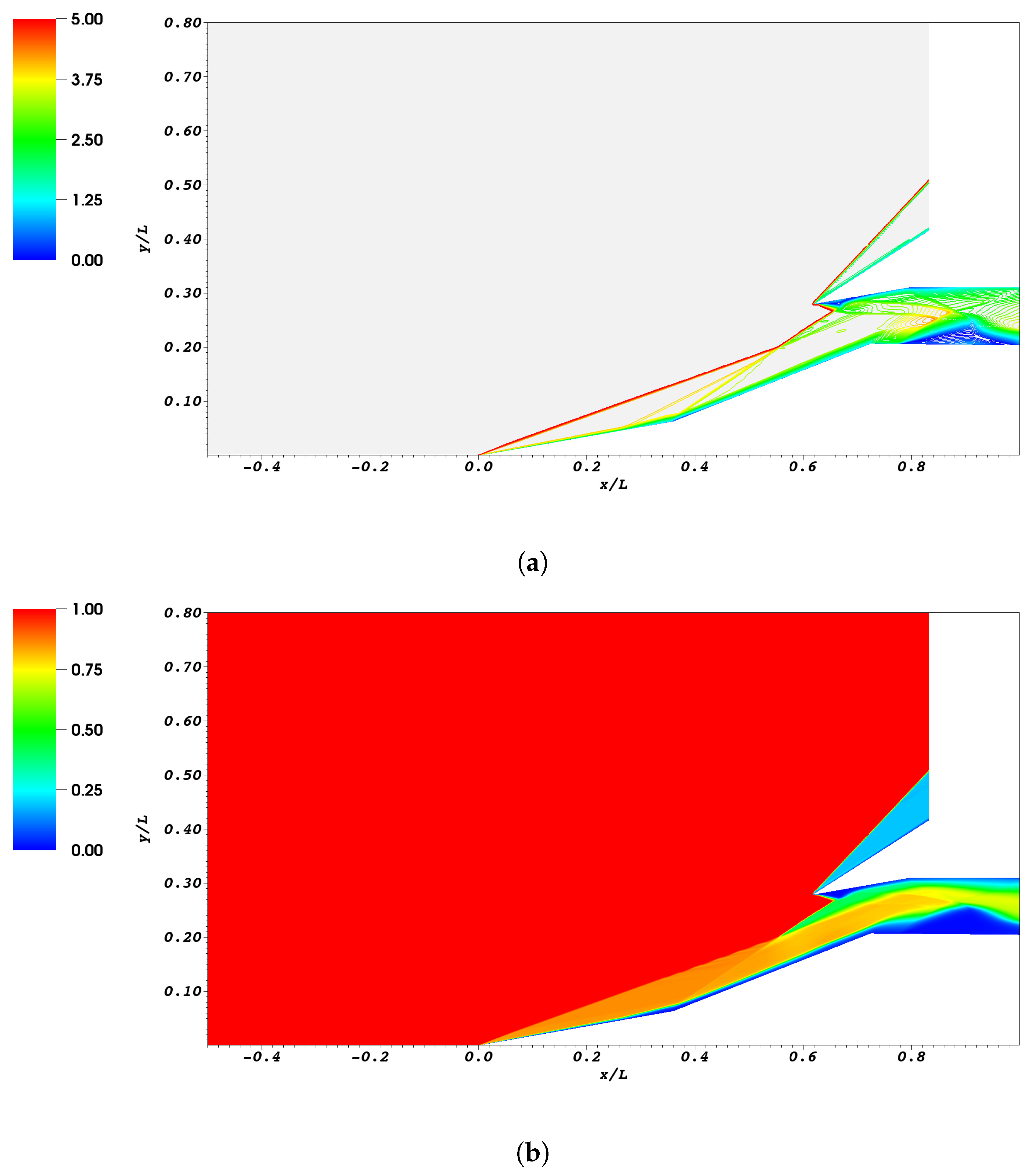
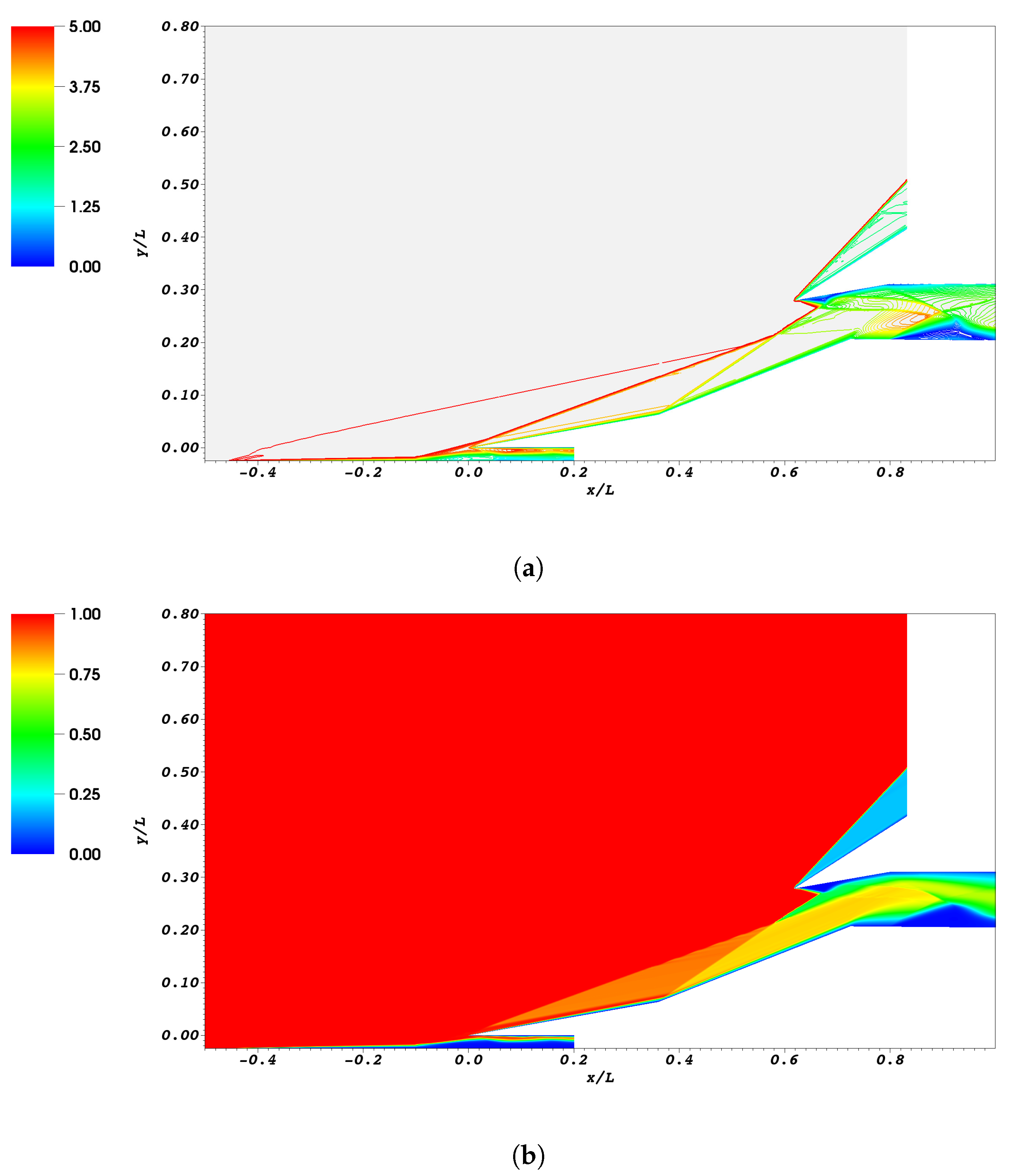
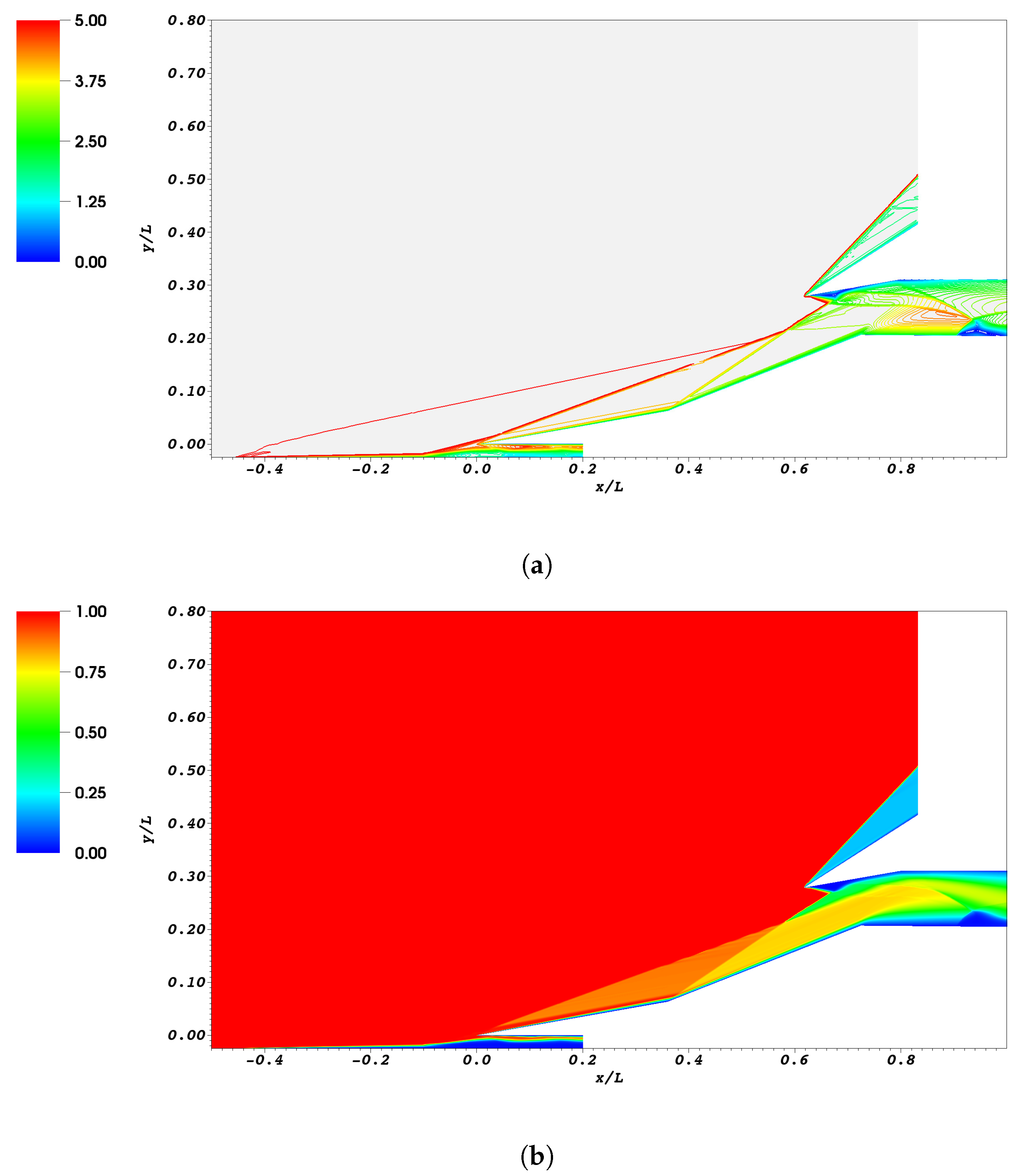
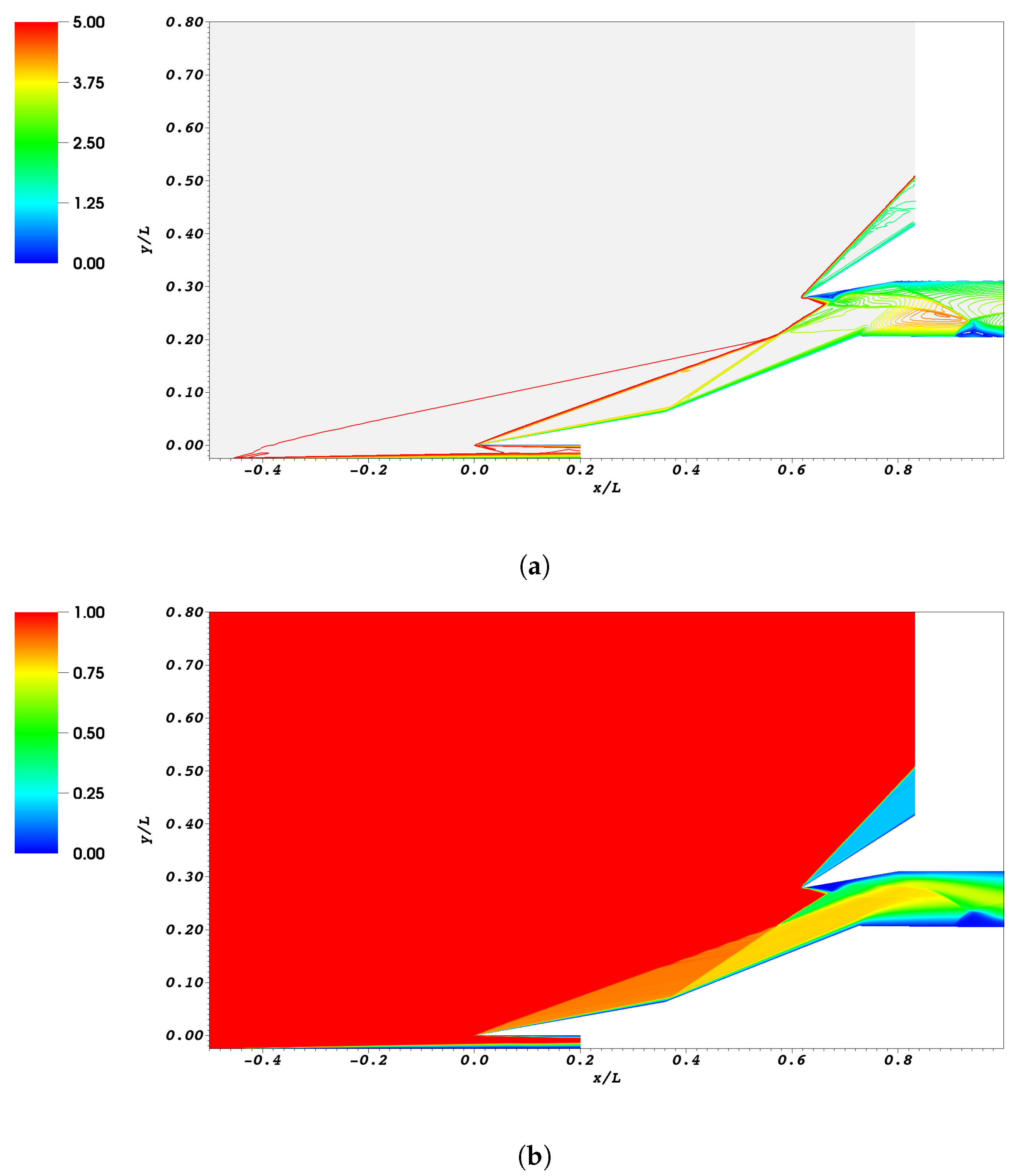
In
Figure 4, the Mach number and total pressure fields obtained by the numerical simulation are reported: the picture shows the different shock waves and their interactions. The reported total pressure field is normalized with respect to the far field total pressure. The coordinates in the picture are normalized with respect to the axial length L (from the leading edge of the first ramp to the end of the inlet channel), previously defined.
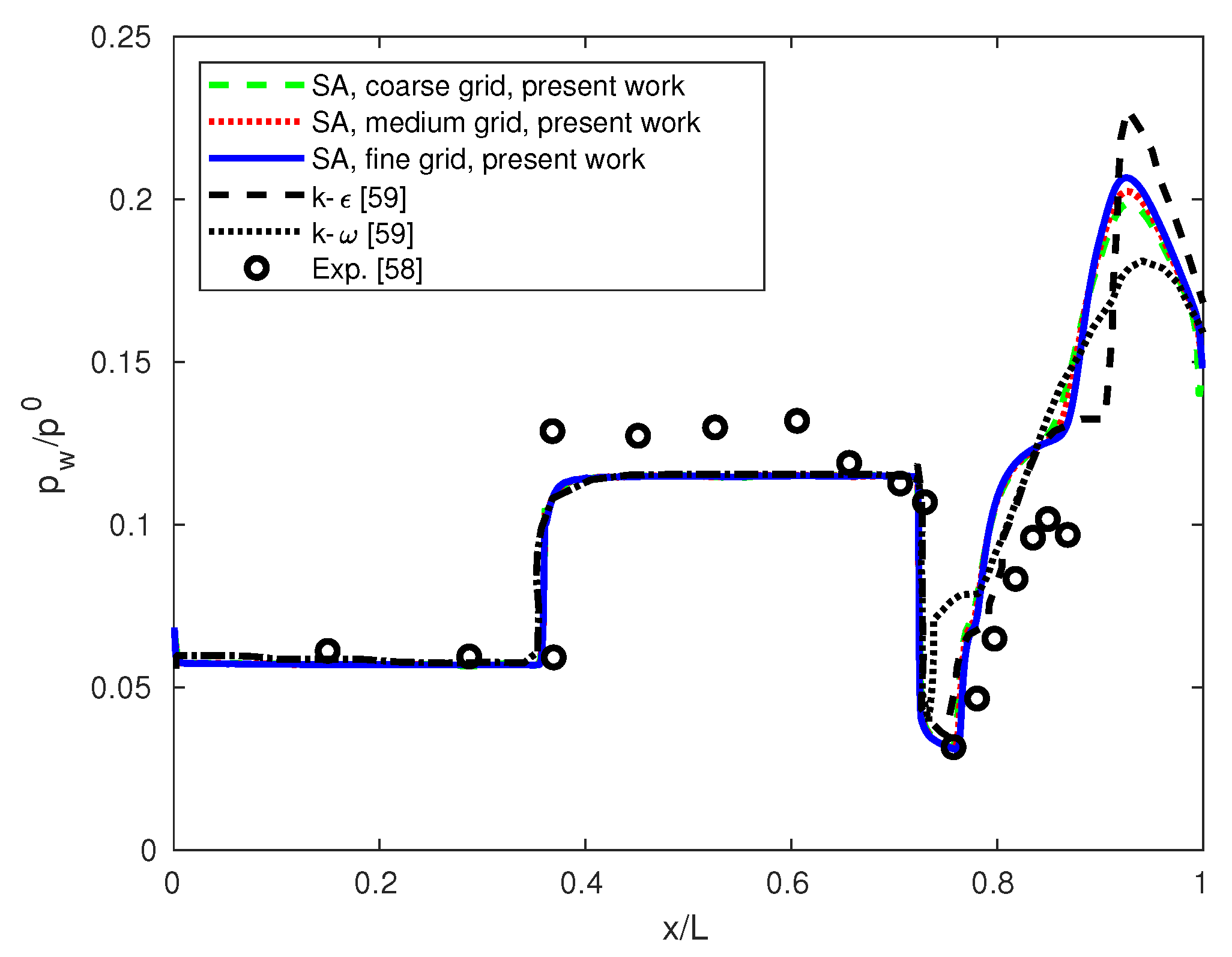
First of all, a grid convergence analysis was performed in order to define the minimum resolution requirements. Three different meshes with 52,723, 83,847 and 16,6281 cells were considered. In
Figure 5 the wall pressure distribution normalized with respect to the far field total pressure is reported. The plot shows a comparison between the experimental results from [
58], the present numerical results and the numerical results obtained with the SST
[
30] and
[
31] models by [
59]. All the numerical simulations tend to underestimate the pressure on the second ramp but they are very close to each other. In contrast, the solution after the expansion fan is quite affected by the choice of the closure model. The present results obtained by the SA model are in the range spanned by the SST
and
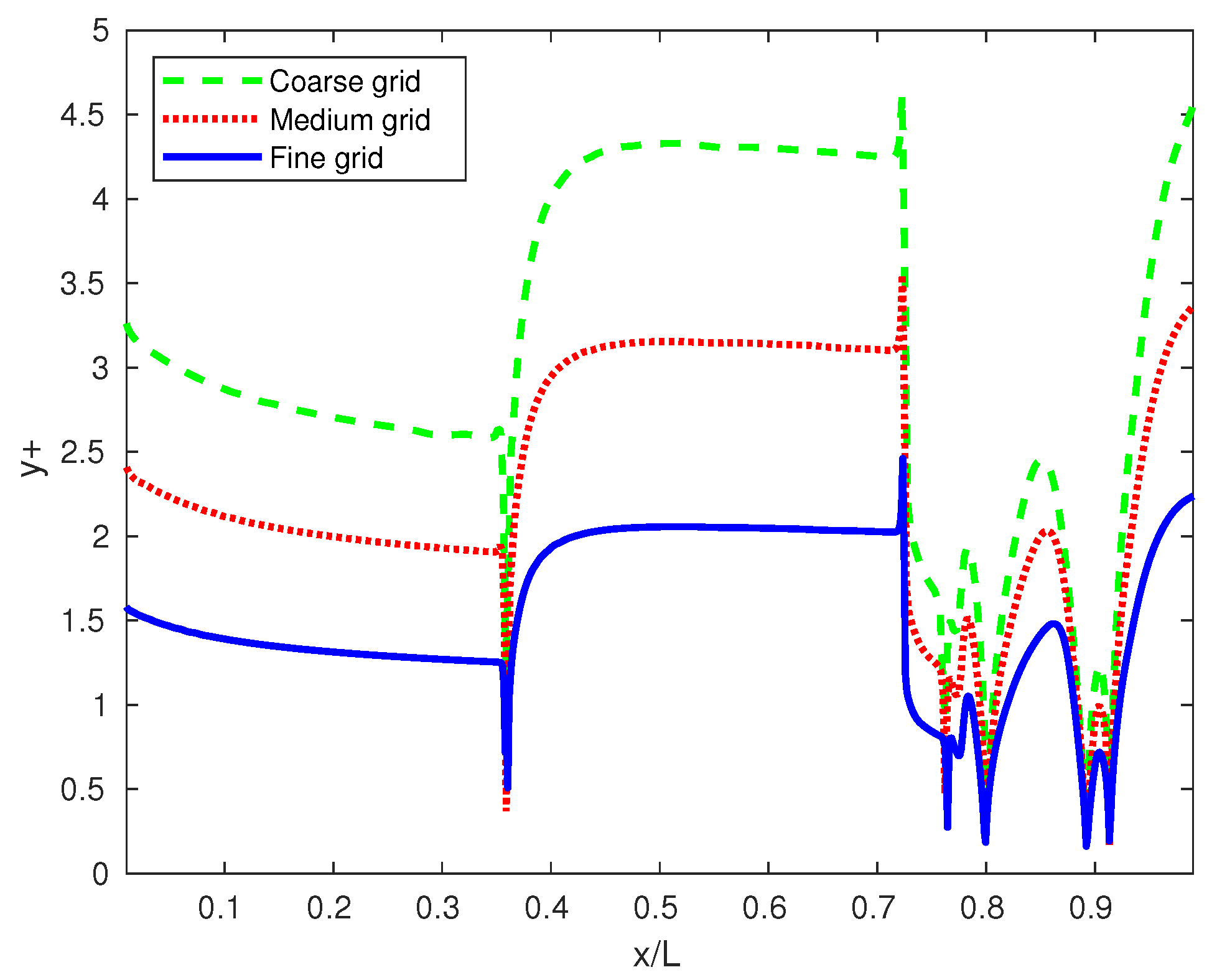
models. In
Figure 6 the dimensionless wall distance
distribution is reported for the different meshes: the finest mesh is characterized by
for almost all the points close to the wall. The size of the first cells in the wall normal direction is
. This satisfies the recommendations for the Spalart–Allmaras model, which suggest introducing at least one point in the viscous sublayer (
). The sensitivity of the results to the mesh resolution shown in
Figure 5 is considered sufficiently small for the finest mesh: the finest resolution level is adopted for all the following simulations.
8. Conclusions
The use of plasma actuators was investigated for improving the performances of a supersonic inlet in off-design conditions. Starting from a very promising configuration studied by [
25], several locations of the plasma actuator were investigated at different flight Mach numbers. A first set of simulations was performed at
: the plasma actuator are quite effective in this off-design condition. The main effects that can be observed are the steering of the shock waves generated by the wedges and the screening effect which substitutes the shock wave with a compression fan. The configuration suggested by [
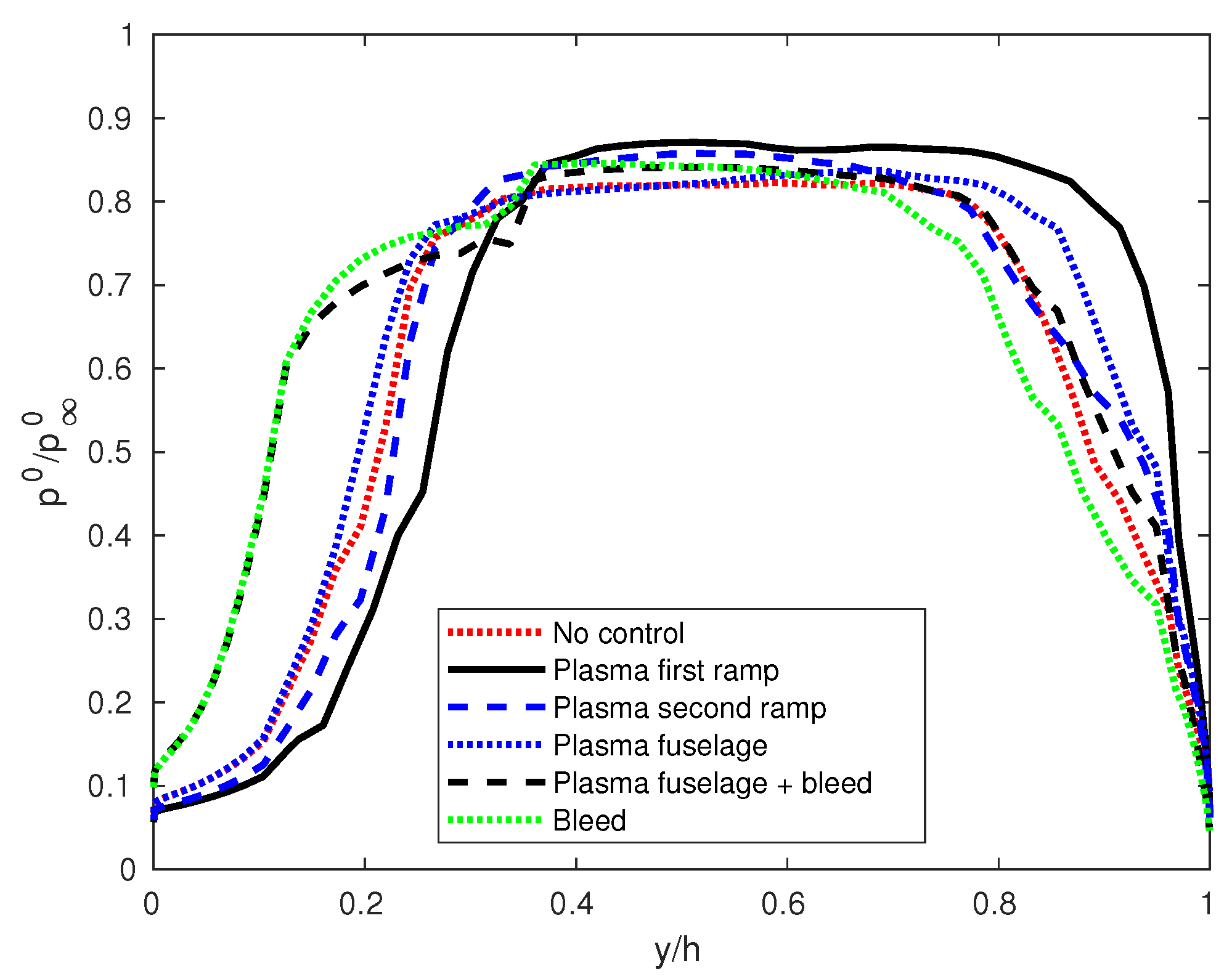
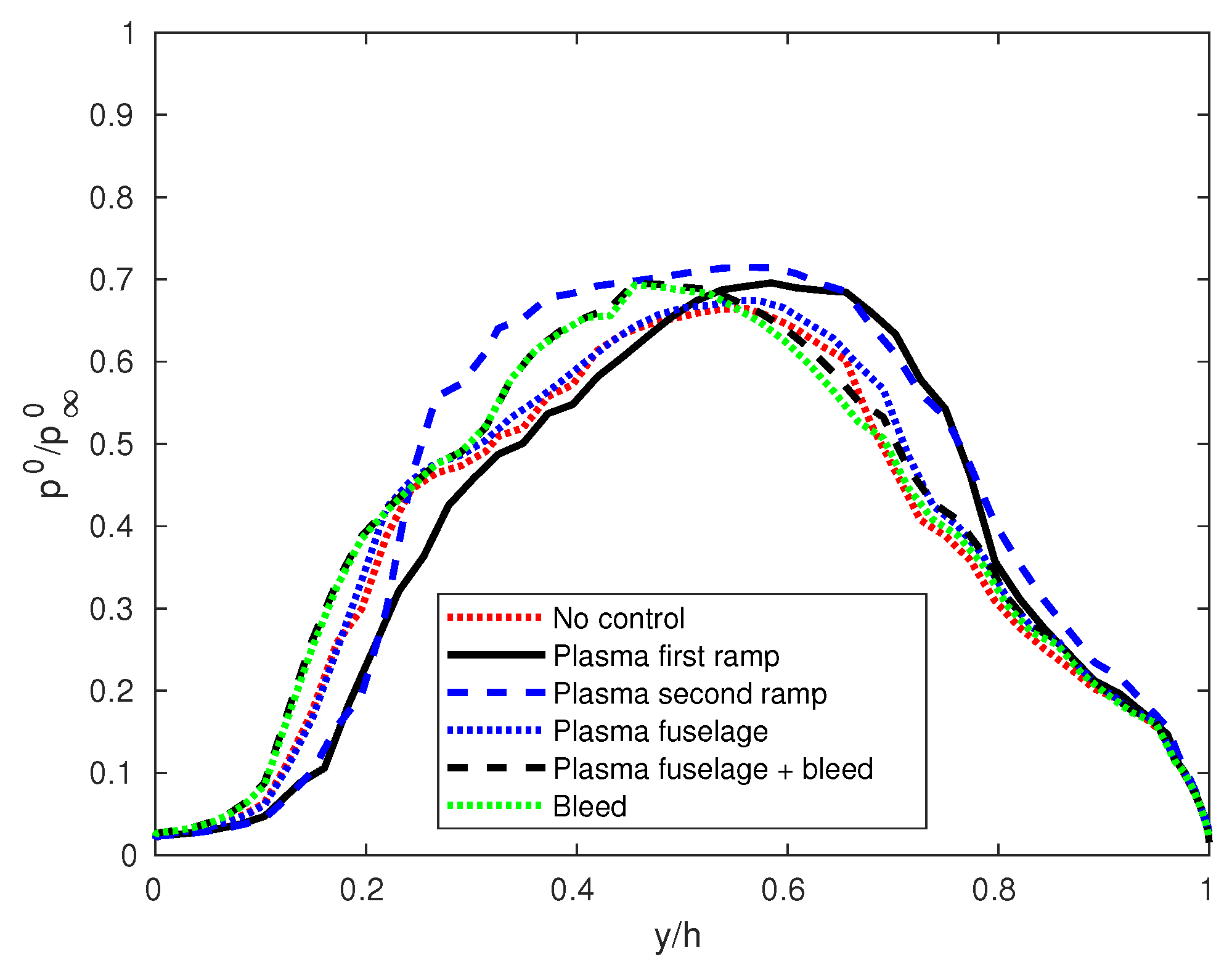
25] with the actuator in front of the first ramp gives the best results in terms of recovery coefficient. However, the alternative configurations proposed in this work (actuator in front of the second ramp, actuator on the fuselage with a diverter) give better performances in terms of flow homogeneity. Furthermore, they proved to be significantly better than the uncontrolled case in terms of recovery factor. These alternative configurations can be useful in the presence of a diverter, which is used in several configurations to avoid boundary layer ingestion. Finally, a configuration in which the plasma actuator is used together with air bleed was evaluated: the bleed seems to introduce only small benefits if the performance indexes chosen for this work are considered. However, the solution with the bleed is characterized by a very small separation bubble in the isolator: since the turbulent flow in the separation region is characterized by strongly unsteady phenomena, this could represent a significant advantage which is not highlighted by the performance indexes chosen for this work.
A second set of simulations was performed at : this condition is very far from the design point and it is characterized by very large separations. Even in this case, the proposed control techniques improve sensibly the performances of the inlet. However, the best recovery factor is now obtained by the configuration with the actuator in front of the second wedge and not by the actuator in front of the first wedge. This suggests that in order to increase the operational range of the inlet, it would be useful to introduce several actuators in different positions: they should be activated one at a time depending on the particular flight Mach number.
In conclusion, the study presented in this work represents a preliminary investigation on the benefits and limitations of the proposed technology, which allowed us to quantify the magnitude of the potential performance improvements. In particular, the simulations allow us to understand how the location of the plasma actuator influences its effectiveness at different flight Mach numbers according to the physical phenomena which are induced by the actuator: shock steering and screening effect. The study is based on a simplified model of the plasma actuator, which describes it by means of an average thermal power source. This approximation is coherent with the description of the turbulent flow by means of a RANS model which provides the average flow field. The most promising configurations obtained in the present study could be investigated by more accurate, but significantly more expensive, scale-resolving 3D simulations (like e.g., LES or hybrid RANS-LES) coupled with a more sophisticated plasma model that could reduce the modeling uncertainty in the performance indexes. Furthermore, the use of 3D simulations would allow to include corner shocks from the ramps and the side walls which influence the flow field close to the end walls.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}