
Design of Robust Control System of Magnetic Suspension and Balance System through Harmonic Excitation Simulation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling of the MSBS
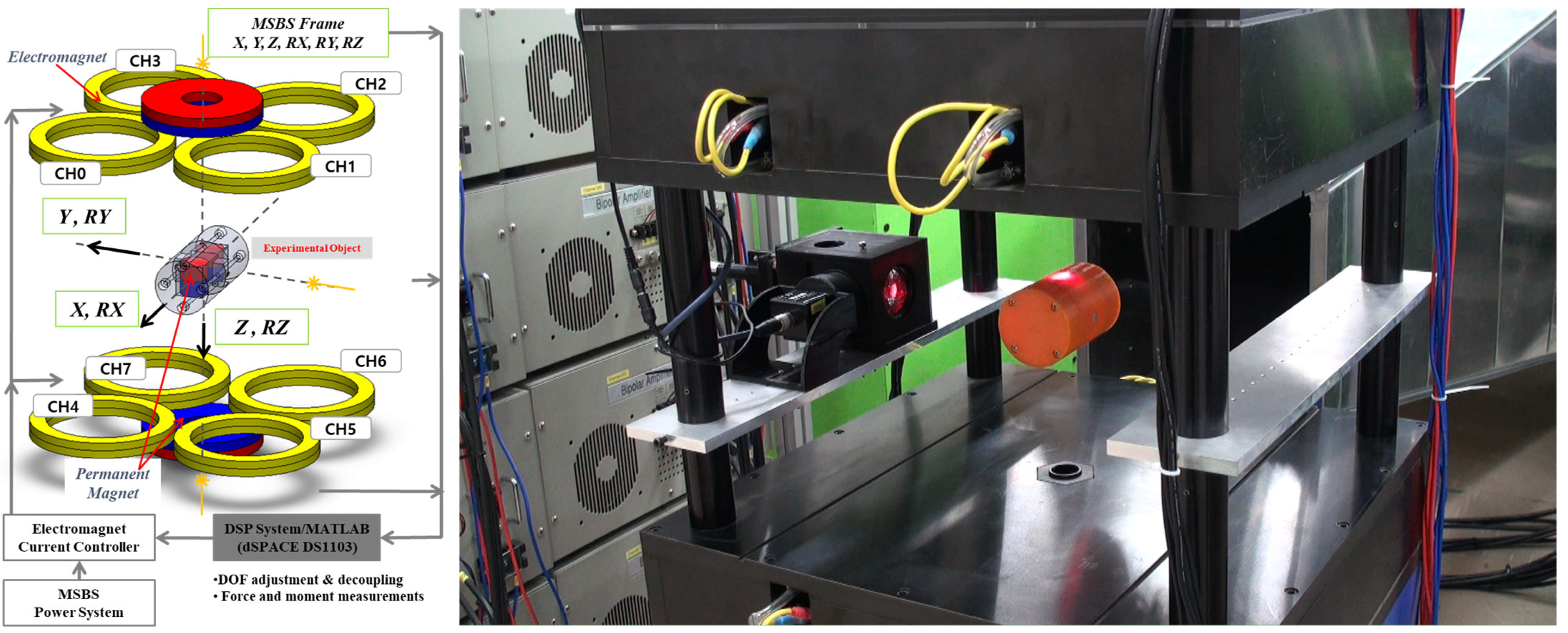
2.1. Configuration
2.2. Equation of Motion
2.3. Magnetic Force and Moment
3. Design of Position and Attitude Control System
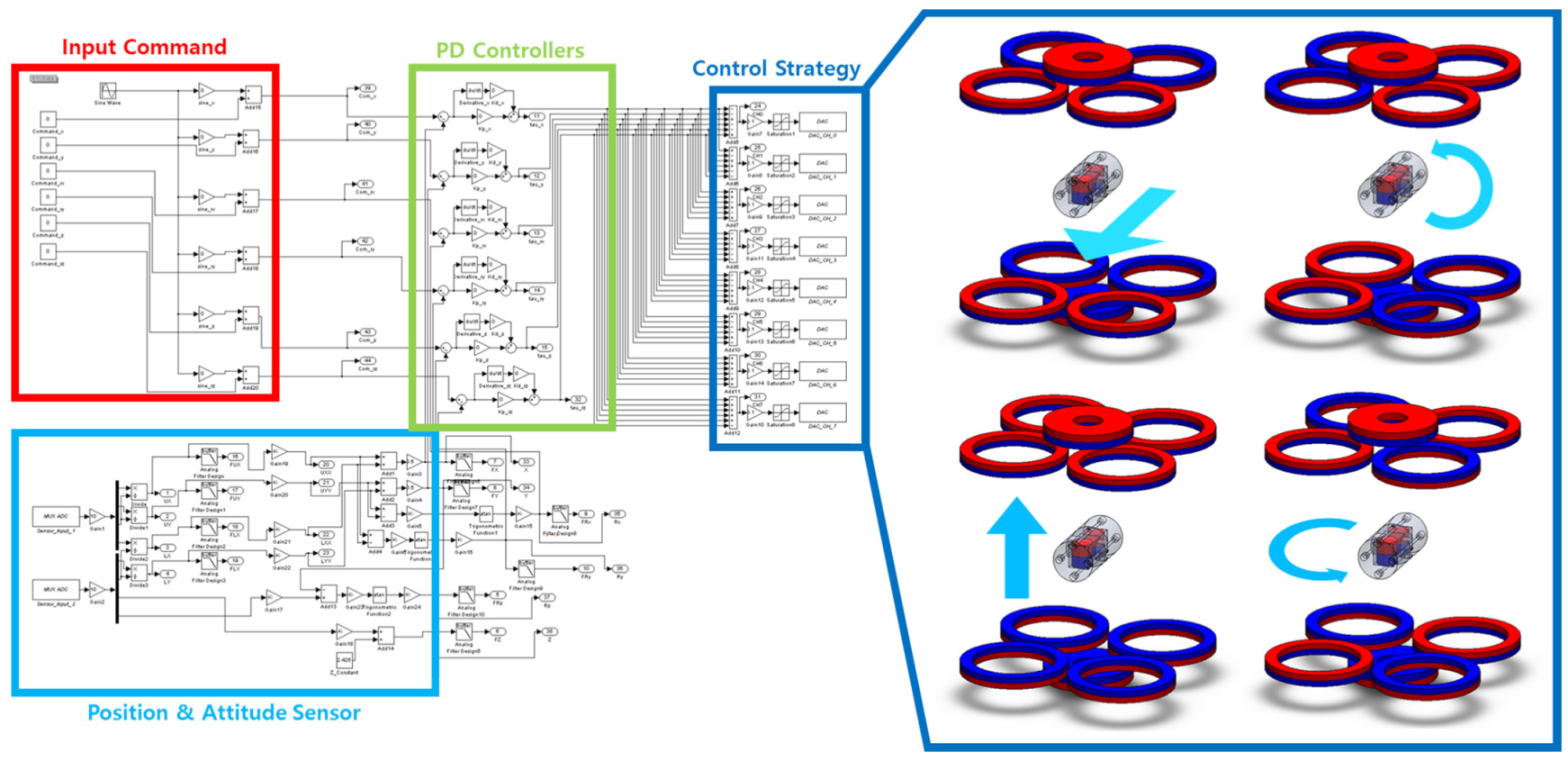
3.1. Baseline Controller
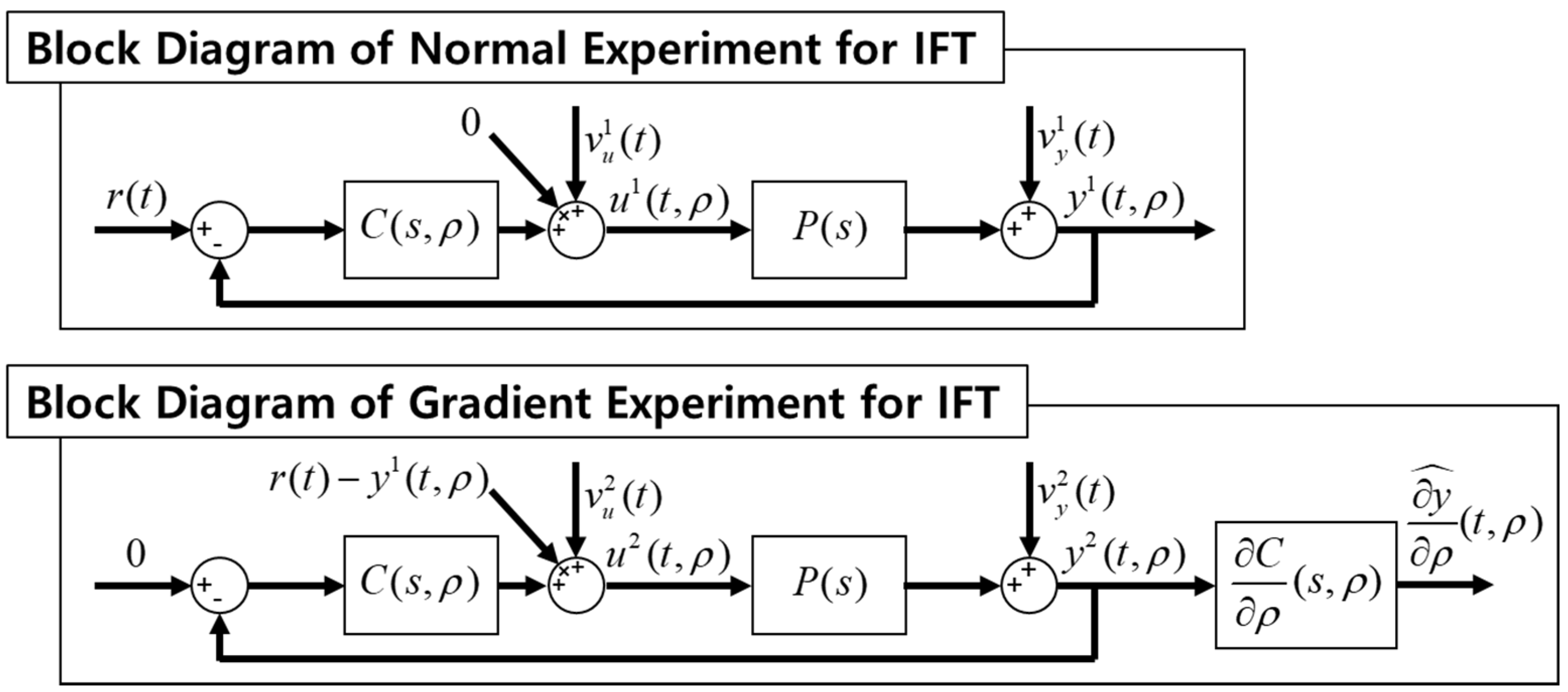
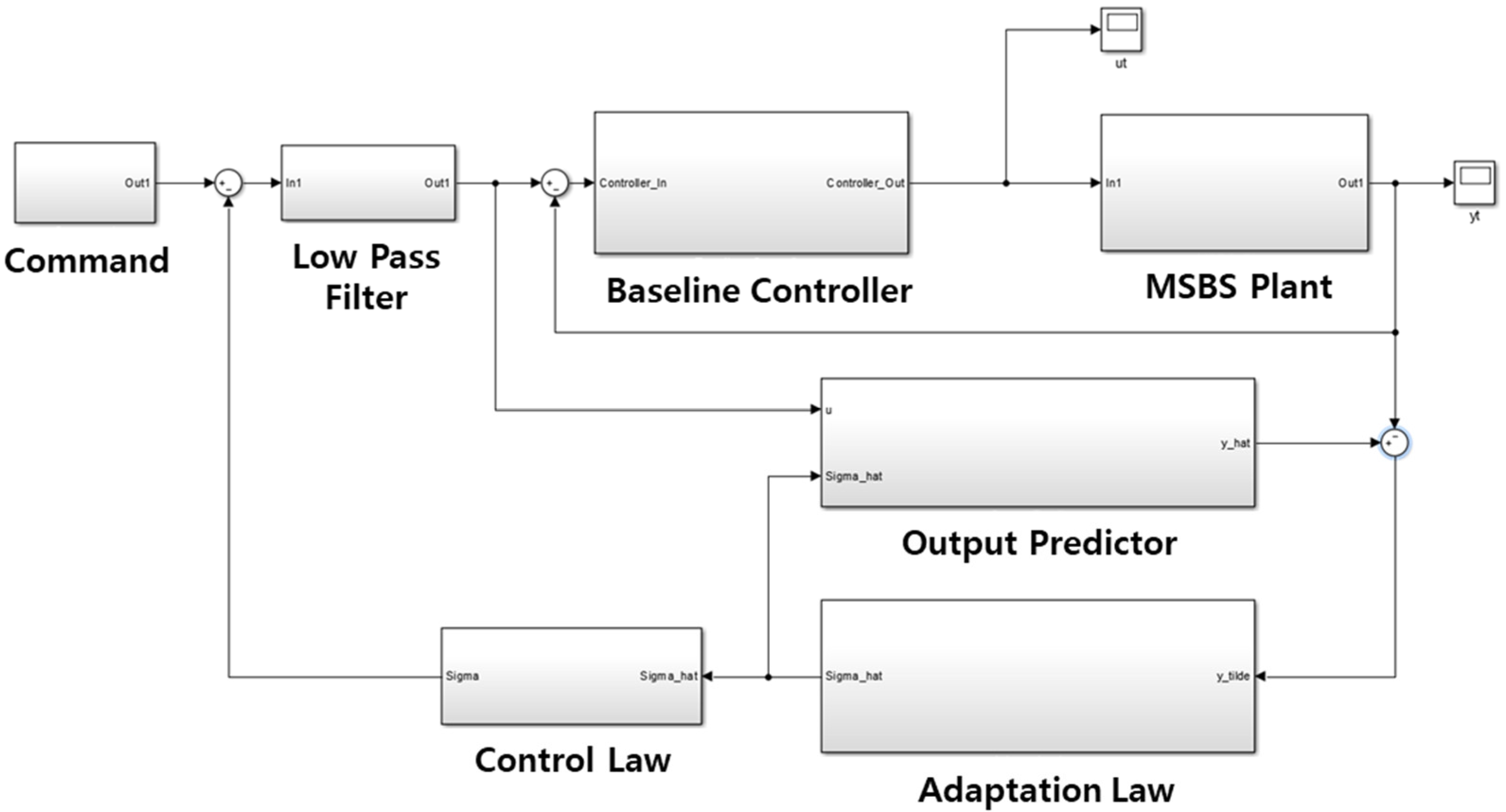
3.2. Adaptive Control Scheme
4. Position and Attitude Control Simulation with Power Supply Failure Condition
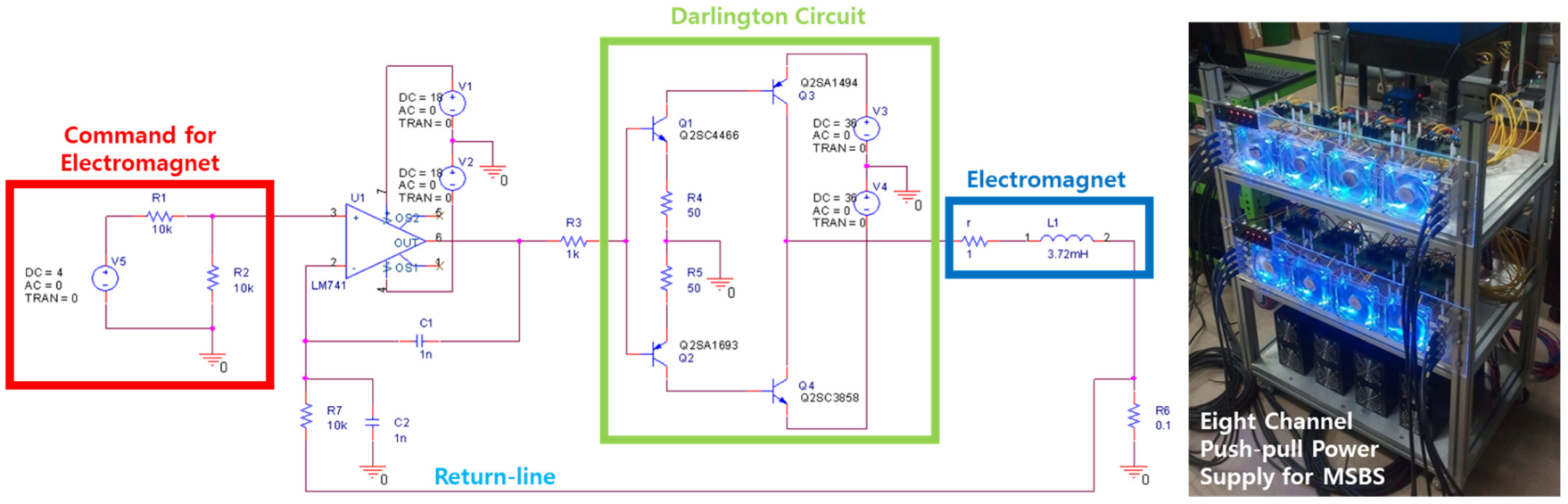
4.1. Electric Power Supply of MSBS
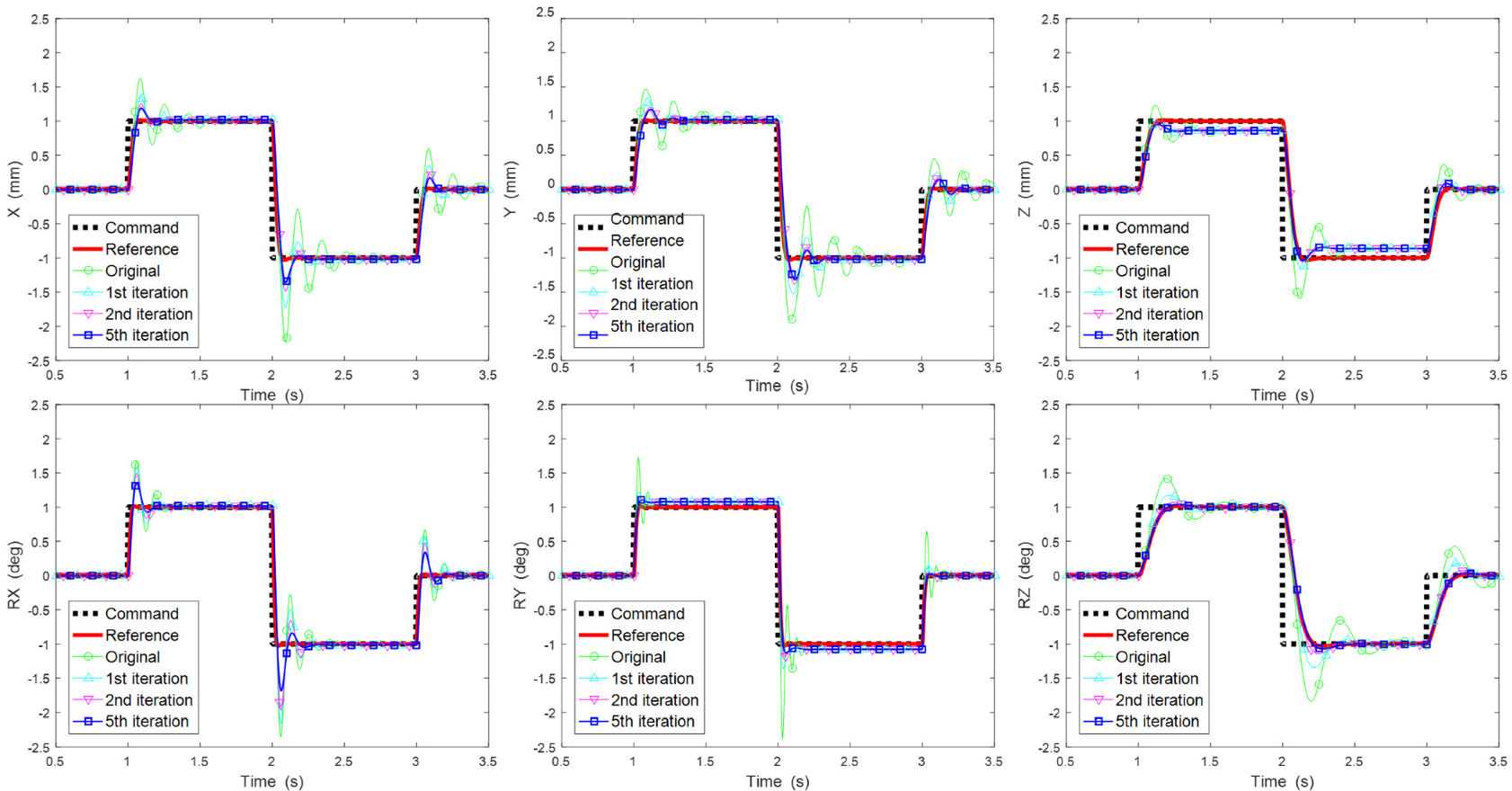
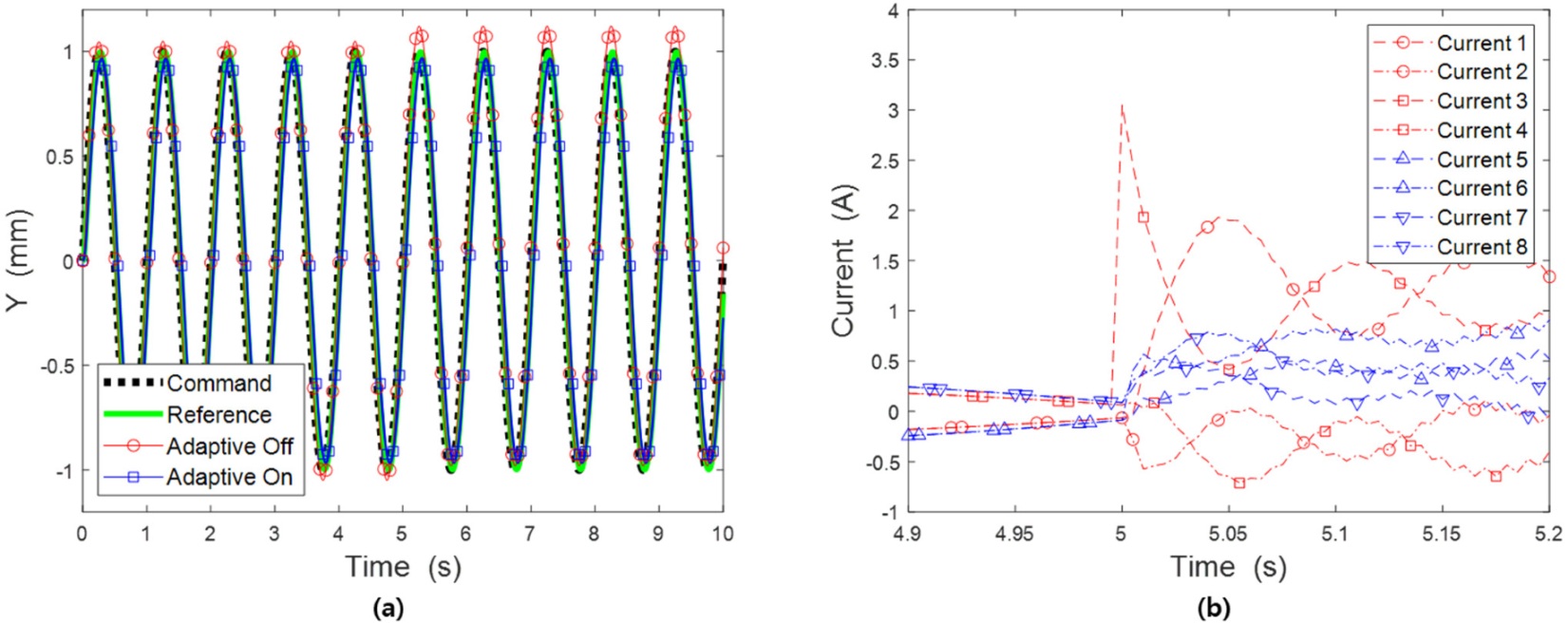
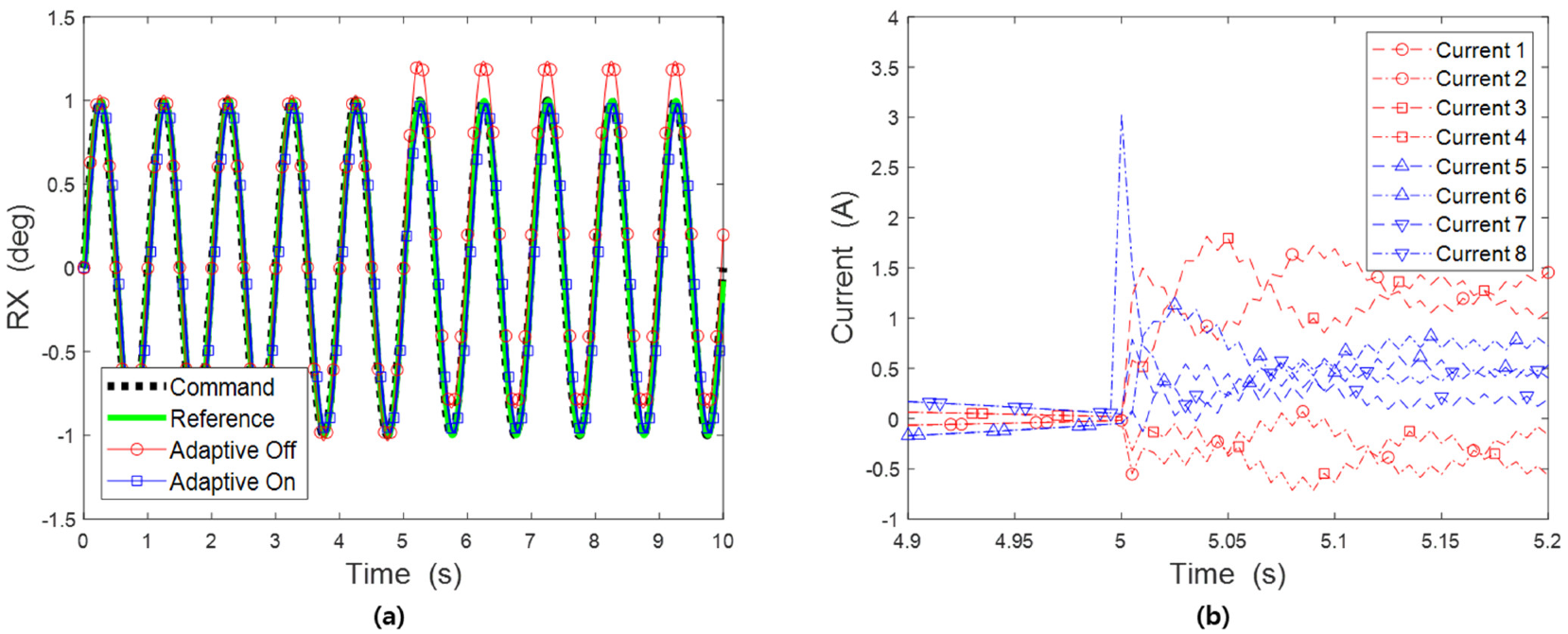
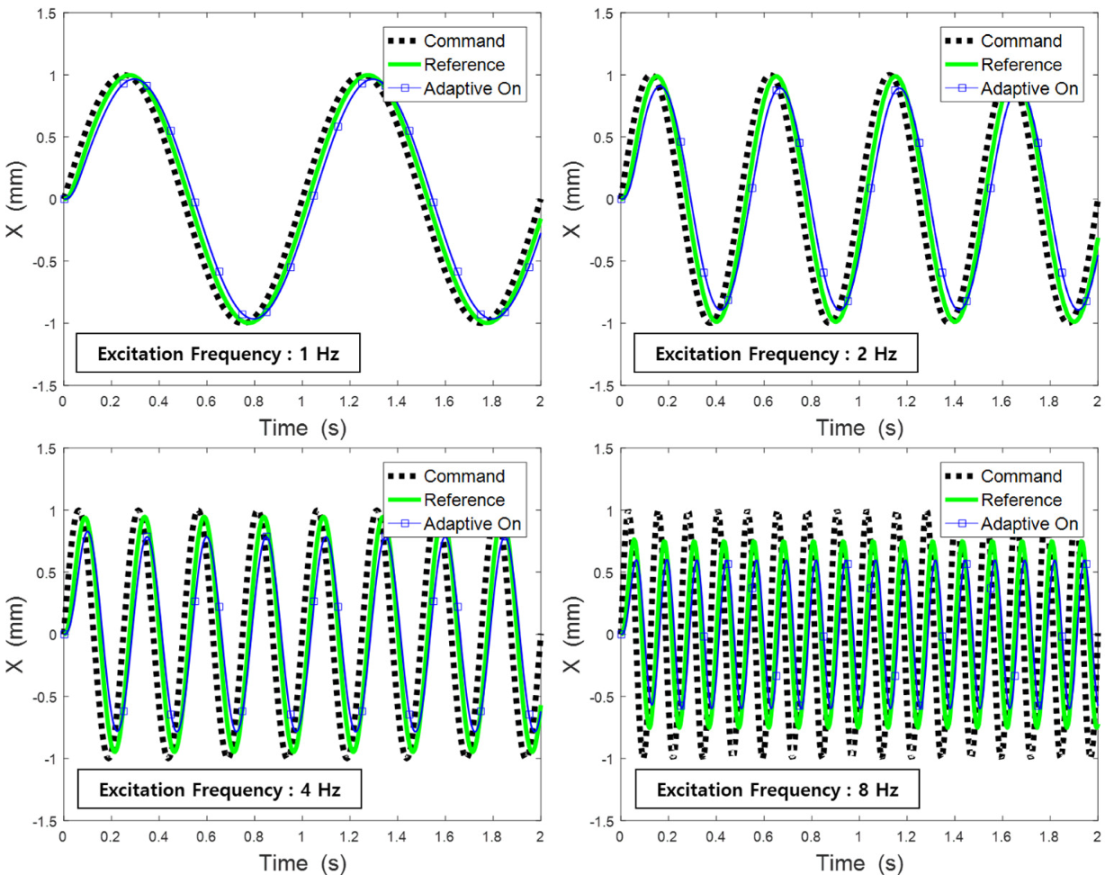
4.2. Harmonic Excitation Simulation with Power Supply Failure
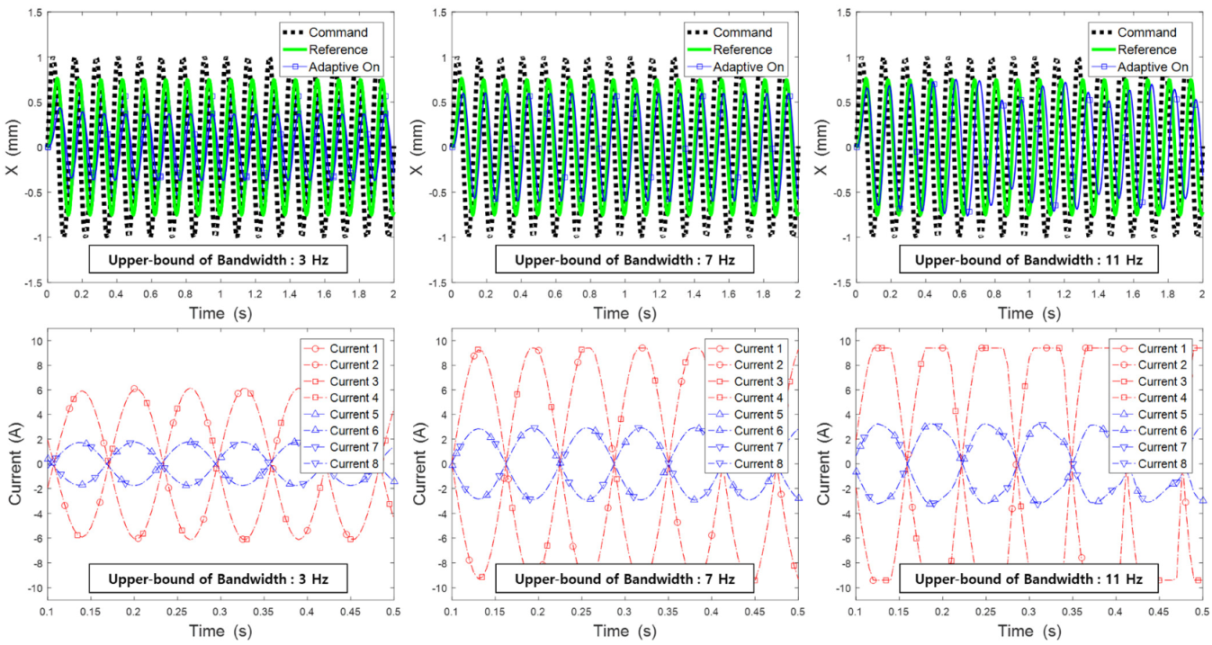
4.3. Effect of Natural Frequency of Low Pass Filter
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sawada, H.; Umezawa, K.; Yokozeki, T.; Watanabe, A.; Otsu, T. Wind tunnel test of Japanese arrows with the JAXA 60-cm magnetic suspension and balance system. Exp. Fluids 2012, 53, 451–466. [Google Scholar] [CrossRef]
- Schoenenberger, M.; Cox, D.E.; Schott, T.; Mackenzie, A.; Ramirez, O.; Britcher, C.P.; Neill, C.; Wienmann, M.; Johnson, D. Preliminary Aerodynamic Measurements from a Magnetic Suspension and Balance System in a Low-Speed Wind Tunnel. In Proceedings of the Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3323. [Google Scholar]
- Kai, D.; Sugiura, H.; Tezuka, A. Magnetic Suspension and Balance System for High-Subsonic Wind Tunnel. AIAA J. 2019, 57, 2489–2495. [Google Scholar] [CrossRef]
- Kaymak, Z. A Simulation of Magnetic Suspension and Balance System for Wind Tunnel. Master’s Thesis, Pennsylvania State University, State College, PA, USA, 2018. [Google Scholar]
- Oshima, R.; Sawada, H.; Obayashi, S. A Development of Dynamic Wind Tunnel Testing Technique by Using a Magnetic Suspension and Balance System. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; p. 1541. [Google Scholar]
- Tuttle, M.H.; Moore, D.L.; Kilgore, R.A. Magnetic Suspension and Balance System; A Comprehensive, Annotated Bibliography; National Aeronautics and Space Administration: Washington, DC, USA, 1991. [Google Scholar]
- Sawada, H.; Tetsuya, K. Development of a 60 cm Magnetic Suspension System. Jpn. Soc. Aeronaut. Space Sci. 2002, 50, 188–195. [Google Scholar]
- Sawada, H.; Suenaga, H.; Kunimasu, T.; Kohno, T. Status of MSBS Study at NAL in 1995. In Proceedings of the Third International Symposium on Magnetic Suspension Technology, Tallahassee, FL, USA, 13–15 December 1995; pp. 505–519. [Google Scholar]
- Sawada, H.; Kohno, T.; Kunimasu, T. Status of MSBS Study at NAL. In Proceedings of the Fifth International Symposium on Magnetic Suspension Technology, Santa Barbara, CA, USA, 1–3 December 1999; pp. 659–674. [Google Scholar]
- Oh, J. Development of a 6-Axes Control Magnetic Suspension and Balance System for the Wind Tunnel Experiments. Master’s Thesis, Fukuoka Institute of Technology, Fukuoka, Japan, 2004. [Google Scholar]
- Covert, E.E. Magnetic Suspension and Balance Systems. IEEE Aerosp. Electron. Syst. Mag. 1988, 3, 14–22. [Google Scholar] [CrossRef]
- Vlajinac, M.; Covert, E.E. Sting-free measurements of sphere drag in laminar flow. J. Fluid. Mech. 1972, 54, 385–392. [Google Scholar] [CrossRef]
- Dress, D.A. Drag measurements on a Modified Prolate Spheroid Using a magnetic Suspension and Balance System. J. Aircr. 1990, 27, 523–528. [Google Scholar] [CrossRef]
- Britcher, C.P.; Alcorn, C.W. Interference-free measurements of the subsonic aerodynamics of slanted-base ogive cylinders. AIAA J. 1991, 29, 520–525. [Google Scholar] [CrossRef]
- Britcher, C.P. Application of Magnetic Suspension and Balance Systems to Ultra-High Reynolds Number Facilities; Flow at Ultra-High Reynolds and Rayleigh Numbers; Springer: New York, NY, USA, 1998. [Google Scholar]
- Britcher, C.P.; Ghofrani, M. A magnetic suspension system with a large angular range. Rev. Sci. Instrum. 1993, 64, 1910–1917. [Google Scholar] [CrossRef] [Green Version]
- Groom, N.J.; Britcher, C.P. A description of a laboratory model magnetic suspension test fixture with large angular capability. In Proceedings of the The First IEEE Conference on Control Applications, Dayton, OH, USA, 13–16 September 1992; pp. 454–459. [Google Scholar]
- Sawada, H.; Kunimasu, T.; Suda, S. Sphere Drag Measurements with the NAL 60 cm MSBS. J. Wind Eng. 2004, 98, 129–136. [Google Scholar]
- Higuchi, H.; Van Langen, P.; Sawada, H.; Tinney, C.E. Axial flow over a blunt circular cylinder with and without shear layer reattachment. J. Fluids Struct. 2006, 22, 949–959. [Google Scholar] [CrossRef]
- Higuchi, H.; Sawada, H.; Kato, H. Sting-free measurements on a magnetically supported right circular cylinder aligned with the free stream. J. Fluid Mech. 2008, 596, 49–52. [Google Scholar] [CrossRef]
- Shinji, K.; Nagaike, H.; Nonomura, T.; Asai, K.; Okuizumi, H.; Konishi, Y.; Sawada, H. Aerodynamic characteristics of low-fineness-ratio freestream-aligned cylinders with magnetic suspension and balance system. AIAA J. 2020, 58, 3711–3714. [Google Scholar] [CrossRef]
- Kawamura, Y.; Takenaga, T.; Oh, J. Development of a low electric power 40 cm class magnetic suspension and balance system. J. Wind Eng. 2004, 98, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.K.; Han, J.H. Safety-Guaranteed Flight Test Environment for Micro Air Vehicles. AIAA J. 2016, 54, 1018–1029. [Google Scholar] [CrossRef]
- Reitz, J.R.; Milford, F.J.; Christy, R.W. Foundations of Electromagnetic Theory; Addison-Wesley Pub. Co.: Boston, MA, USA, 1993. [Google Scholar]
- Hjalmarsson, H. Iterative Feedback Tuning-an Overview. Int. J. Adapt. Control. Signal Process. 2002, 16, 373–395. [Google Scholar] [CrossRef]
- Huusom, J.K. Improving Convergence of Iterative Feedback Tuning. J. Process. Control. 2009, 19, 570–578. [Google Scholar] [CrossRef] [Green Version]
- Jung, Y.; Shim, D.H. Design the Flight Control System against Model Uncertainty. In Proceedings of the KSAS Fall Conference, Jeju, Korea, 15–16 November 2012; pp. 551–556. [Google Scholar]
- Hovakimyan, N.; Cao, C. L1 Adaptive Control Theory; SIAM: Philadelphia, PA, USA, 2010. [Google Scholar]
- Michini, B.; How, J.P. L1 Adaptive Control for Indoor Autonomous Vehicles: Design Process and Flight Testing. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5754. [Google Scholar]
- Celaya, J.R.; Saxena, A.; Kulkarni, C.S.; Saha, S.; Goebel, K. Prognostics approach for power MOSFET under thermal-stress aging. In Proceedings of the Annual Reliability and Maintainability Symposium, Reno, NV, USA, 23–26 January 2012; pp. 1–6. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, D.-K. Design of Robust Control System of Magnetic Suspension and Balance System through Harmonic Excitation Simulation. Aerospace 2021, 8, 304. https://doi.org/10.3390/aerospace8100304
Lee D-K. Design of Robust Control System of Magnetic Suspension and Balance System through Harmonic Excitation Simulation. Aerospace. 2021; 8(10):304. https://doi.org/10.3390/aerospace8100304
Chicago/Turabian StyleLee, Dong-Kyu. 2021. "Design of Robust Control System of Magnetic Suspension and Balance System through Harmonic Excitation Simulation" Aerospace 8, no. 10: 304. https://doi.org/10.3390/aerospace8100304
APA StyleLee, D. -K. (2021). Design of Robust Control System of Magnetic Suspension and Balance System through Harmonic Excitation Simulation. Aerospace, 8(10), 304. https://doi.org/10.3390/aerospace8100304