
A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical Challenges


Abstract
:1. Introduction
2. Analysis
2.1. Definitions
- The test object is flown unconstrained in the open atmosphere, which excludes flight inside wind-tunnel facilities.
- The test object does not have any crew on-board, independently of its control method.
- The test object represents a significantly larger, more complex system or technology and is therefore far from a final product, which excludes conventional flight testing of unmanned aerial vehicles (UAVs) but does not exclude technology demonstrators.
- geometric similarity, which implies equivalence in shape and proportions;
- kinematic similarity, which implies equivalence in motion;
- and dynamic similarity, which implies equivalence in motion and forces.
2.2. Common Scaling Methods
2.2.1. Aerodynamic Scaling
2.2.2. Dynamic Scaling
2.2.3. Aeroelastic Scaling
2.2.4. Demonstrative Scaling
2.3. Recent SFT Projects
- Project or platform has produced at least one publication in English in a scientific journal or conference.
- Project or platform has shown signs of activity (publications or related research activities) during the last decade (2010–2020).
- Project or platform utilisation fits the definition of SFT given in Section 2.1.
- Keyword- and keystring-based search using established search engines for scientific publications (SCOPUS, Google Scholar) with an extended timespan (1990–2020).
- Filtering and removal of duplicates, resubmissions, drafts, and publications outside the field of interest.
- First filtering of valid SFT projects based on information from title, abstract, main features and conclusions.
- Tracing of citations in the already selected publications.
- Expert consultation for additional references.
- Second filtering of valid SFT projects according to the selection criteria detailed above.
- Grouping of publications based on the project they relate to.
- Analysis of each project’s aim, methods and platforms.
- Elaboration of a final list of SFT platforms according to its utilisation.
2.4. Most Common Issues Associated with SFT
- Scaling issues:
- −
- Not possible to attain sufficiently high Reynolds and Mach numbers to ensure aerodynamic similarity.
- −
- Flow distortion due to the need for model actuation, instrumentation, propulsion, and manufacturing constraints.
- −
- Not possible to attain dynamic similarity with Froude and Mach numbers simultaneously.
- −
- Similarity in mass ratio and inertia is severely constrained by operational, economic and practical limitations.
- −
- Dissimilar mass and inertia variations during flight due to different fuel fractions and fuel system.
- −
- Quick angular motion at small scales impose hard requirements on actuation and data acquisition systems.
- −
- Not possible to match aeroelastic similarity criteria with dynamic similarity at practical model scales and speeds.
- −
- Difficult to attain similarity in stiffness, mass distribution and inertial characteristics in a functional aeroelastic model.
- Flight testing issues:
- −
- Severe airspace and operational constraints for remotely piloted aircraft.
- −
- Optimum flight test organisation and procedures differ from those typical of full scale testing.
- −
- Lack of appropriate instrumentation and data acquisition systems for small vehicles.
- Data analytics issues:
- −
- Measurements usually disturbed by turbulence due to ground proximity and operational constraints.
- −
- Lack of an appropriate specialised framework for data conditioning and visualisation.
3. Tackling SFT Issues
3.1. Approaches to Scaling Issues
3.1.1. Management of Flow Differences
3.1.2. Management of Dynamic Similarity, Mass, and Response Time
3.1.3. Aeroelastic Considerations
3.1.4. The Demonstrative Scaling Approach
3.2. Approaches to Flight-Testing Issues
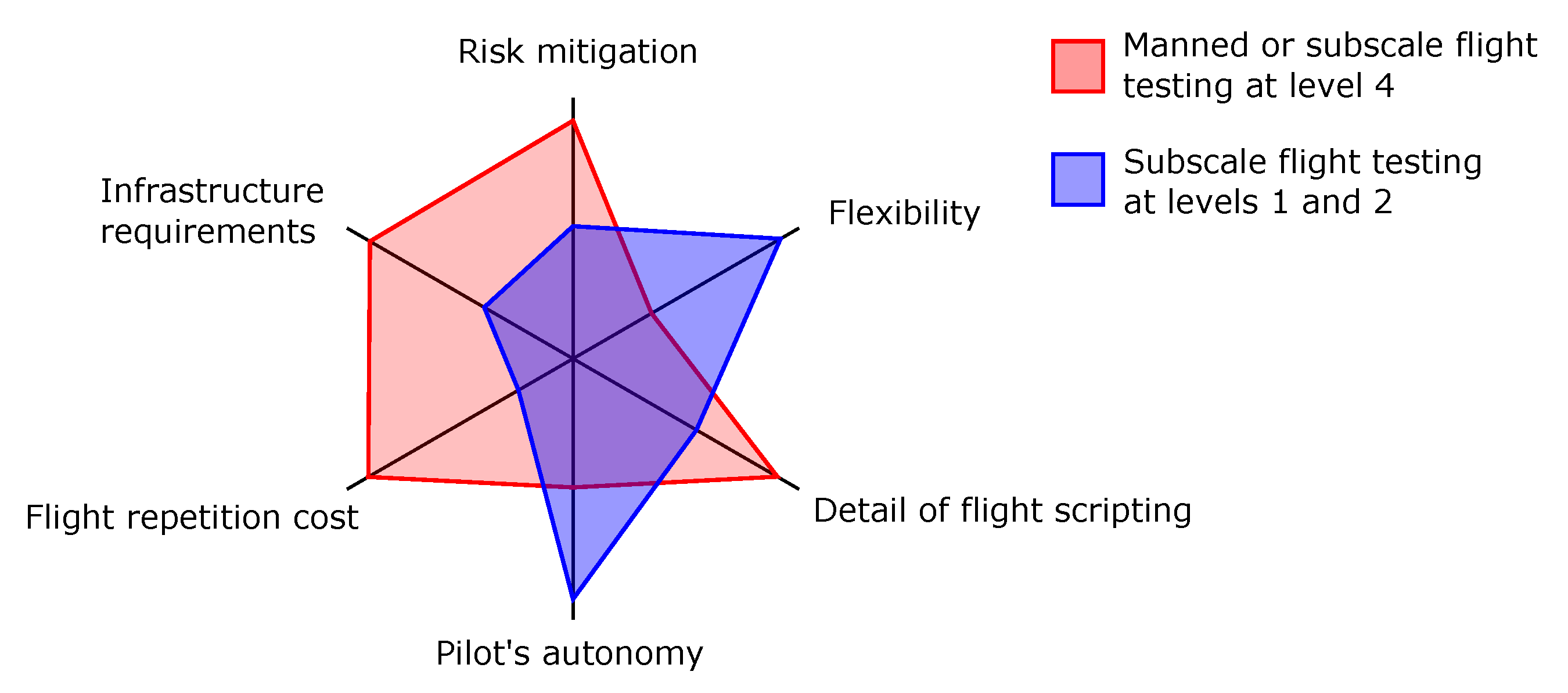
3.2.1. Optimising SFT at Levels 1 and 2
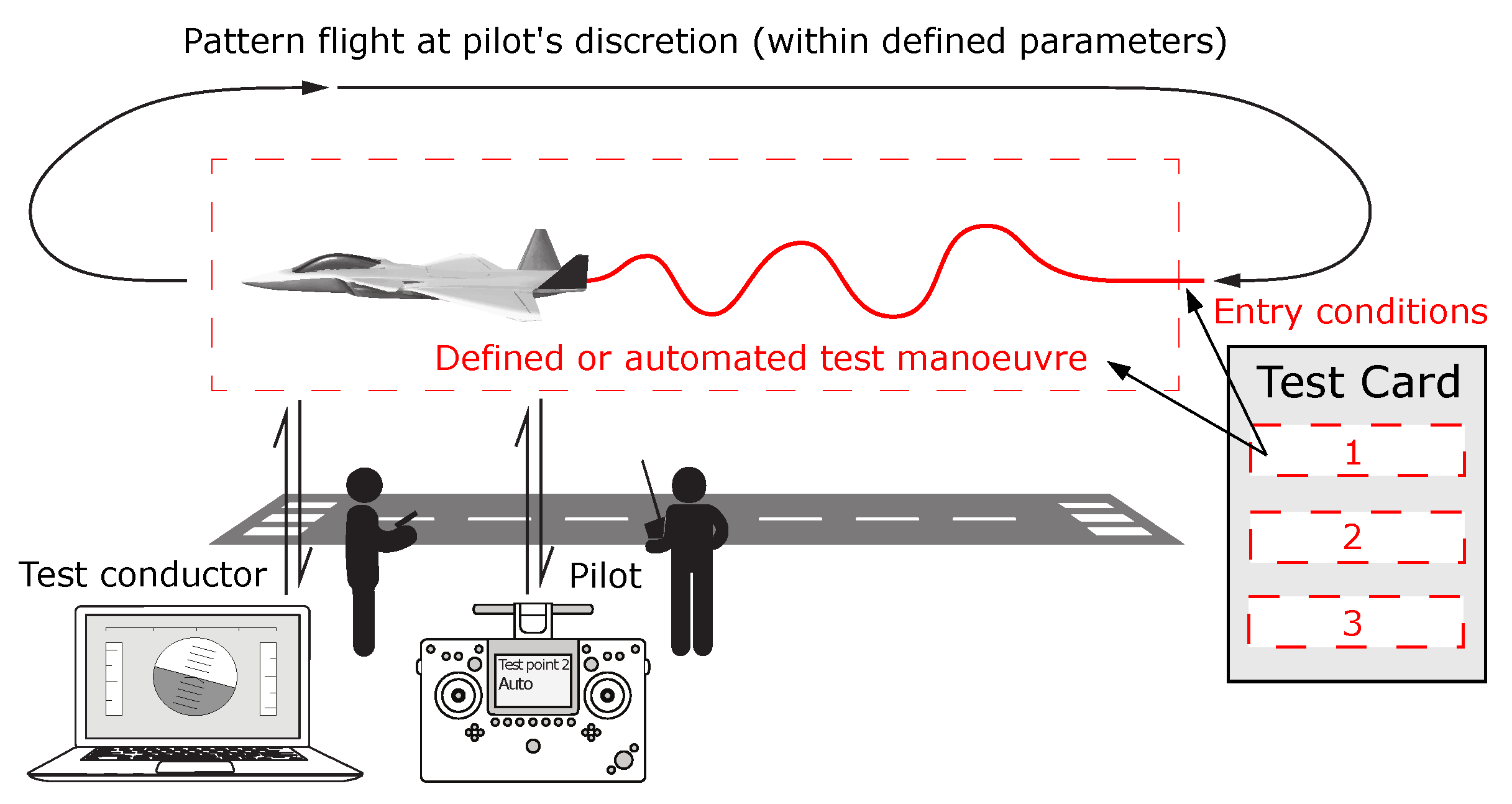
- Automation of test manoeuvres: Custom-made software that is able to precisely command any kind of pre-programmed excitation manoeuvres without the need for a closed-loop flight controller or an on-line ground station, hence avoiding eventual redundancy and certification requirements.
- Optimised manoeuvres for flight mechanical characteristics: Reduce exposure time by exciting different axes and controls simultaneously using multisine signals [94].
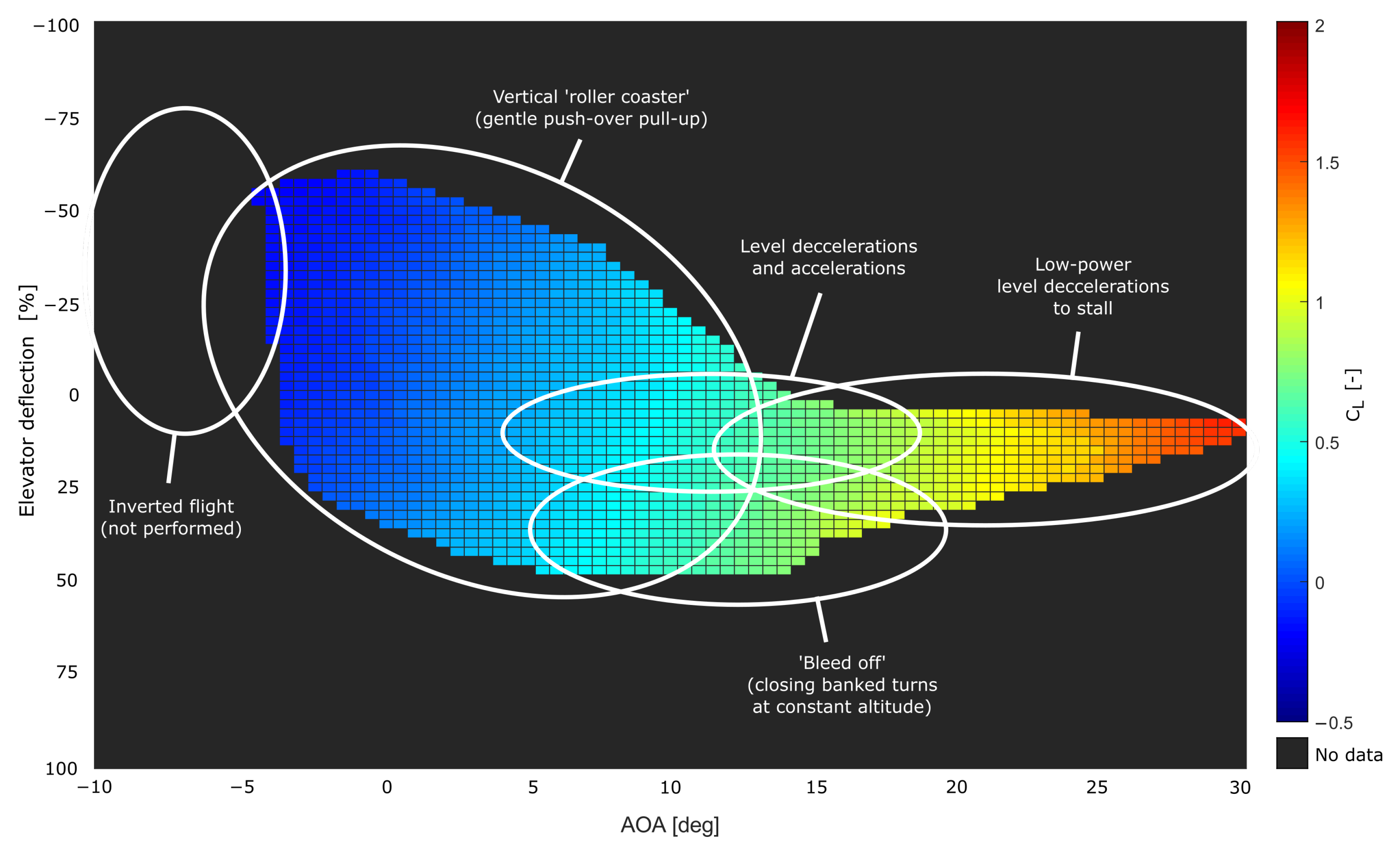
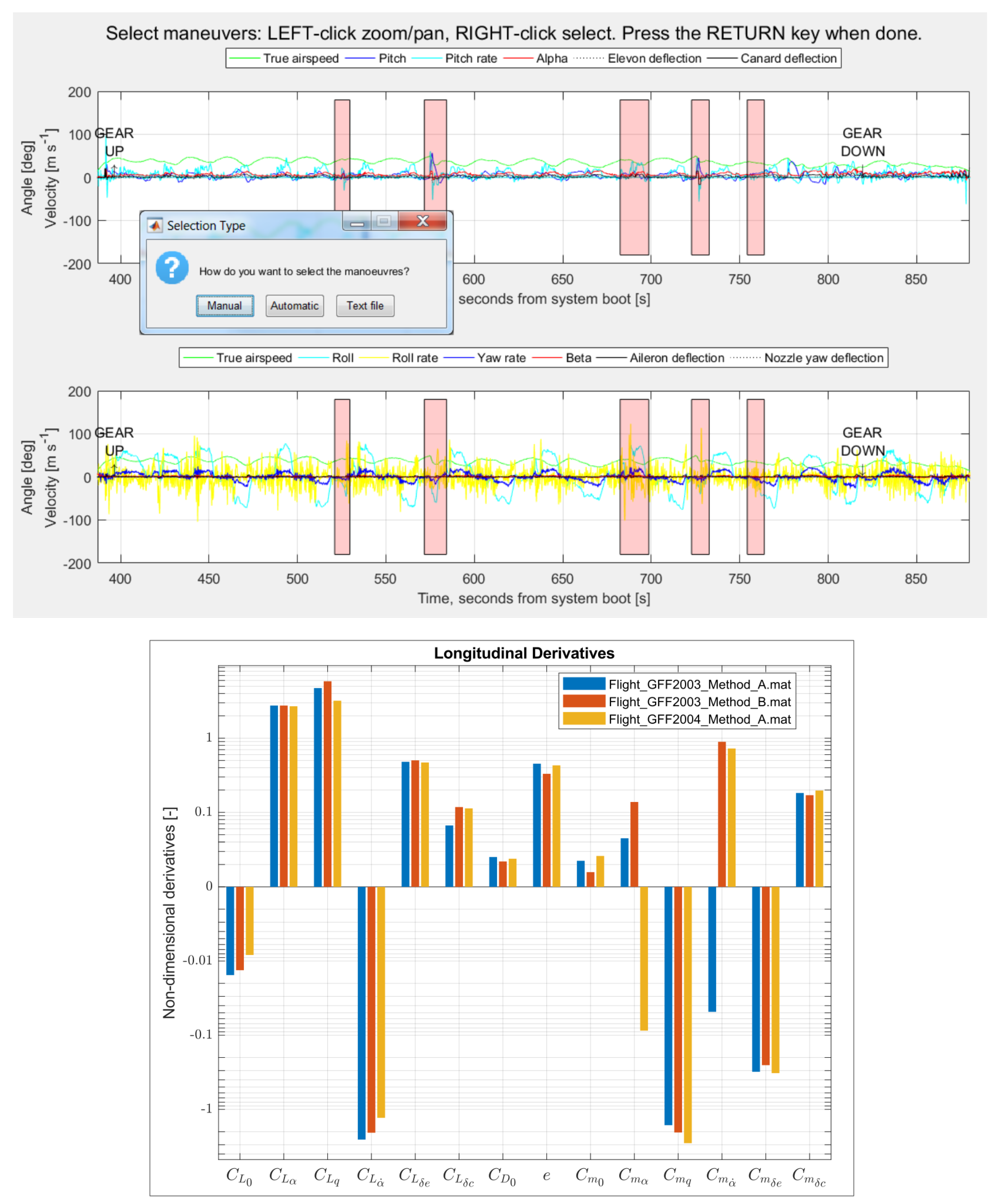
- Optimised manoeuvres for performance evaluation: Executing certain dynamic manoeuvres that allow for the exploration of a wide area of the polar in a short time. Figure 6 is an example of the lift characteristics of the GFF demonstrator identified from a single flight using some of the manoeuvres proposed in [93].
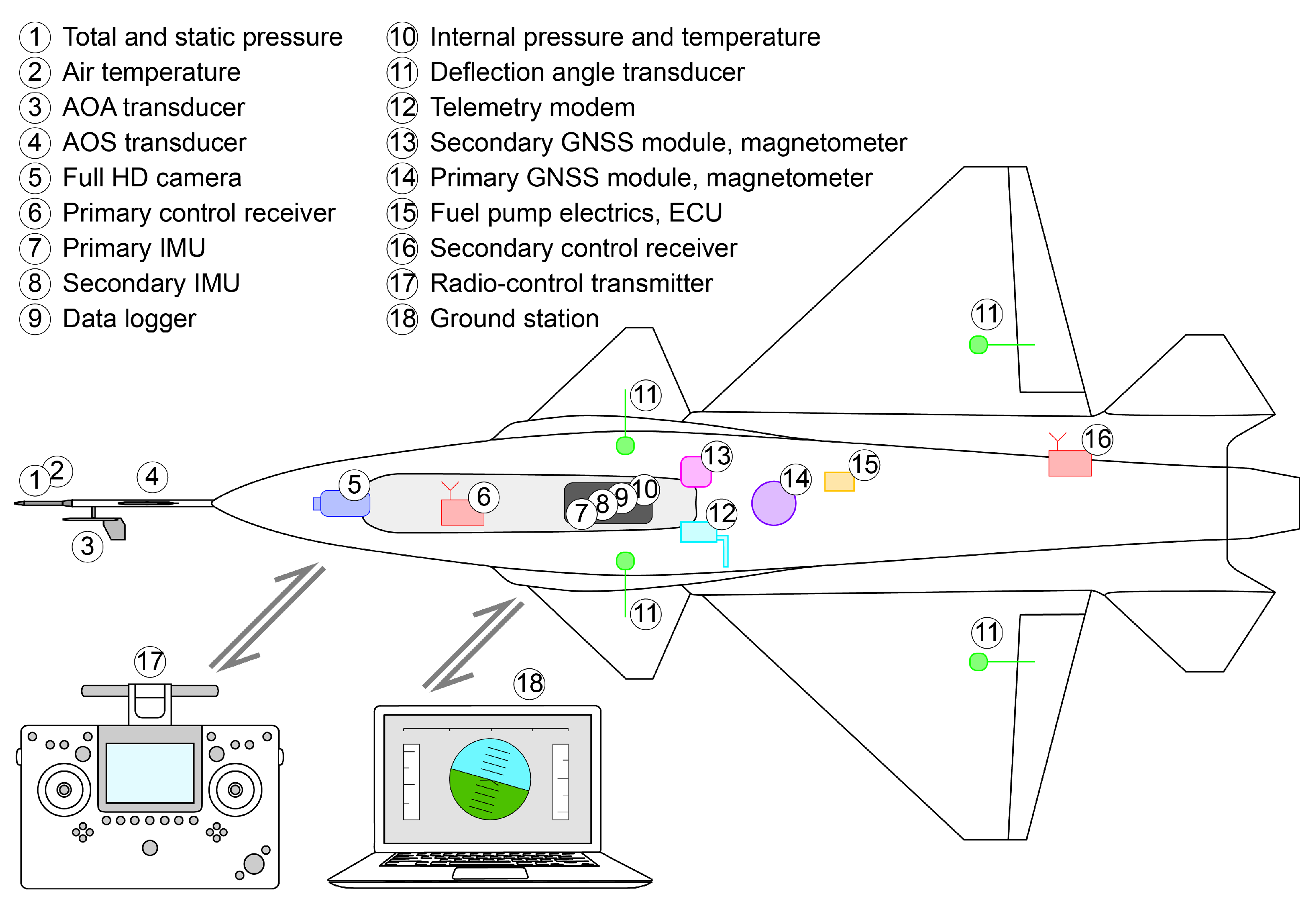
3.2.2. Specific Data Acquisition Solutions
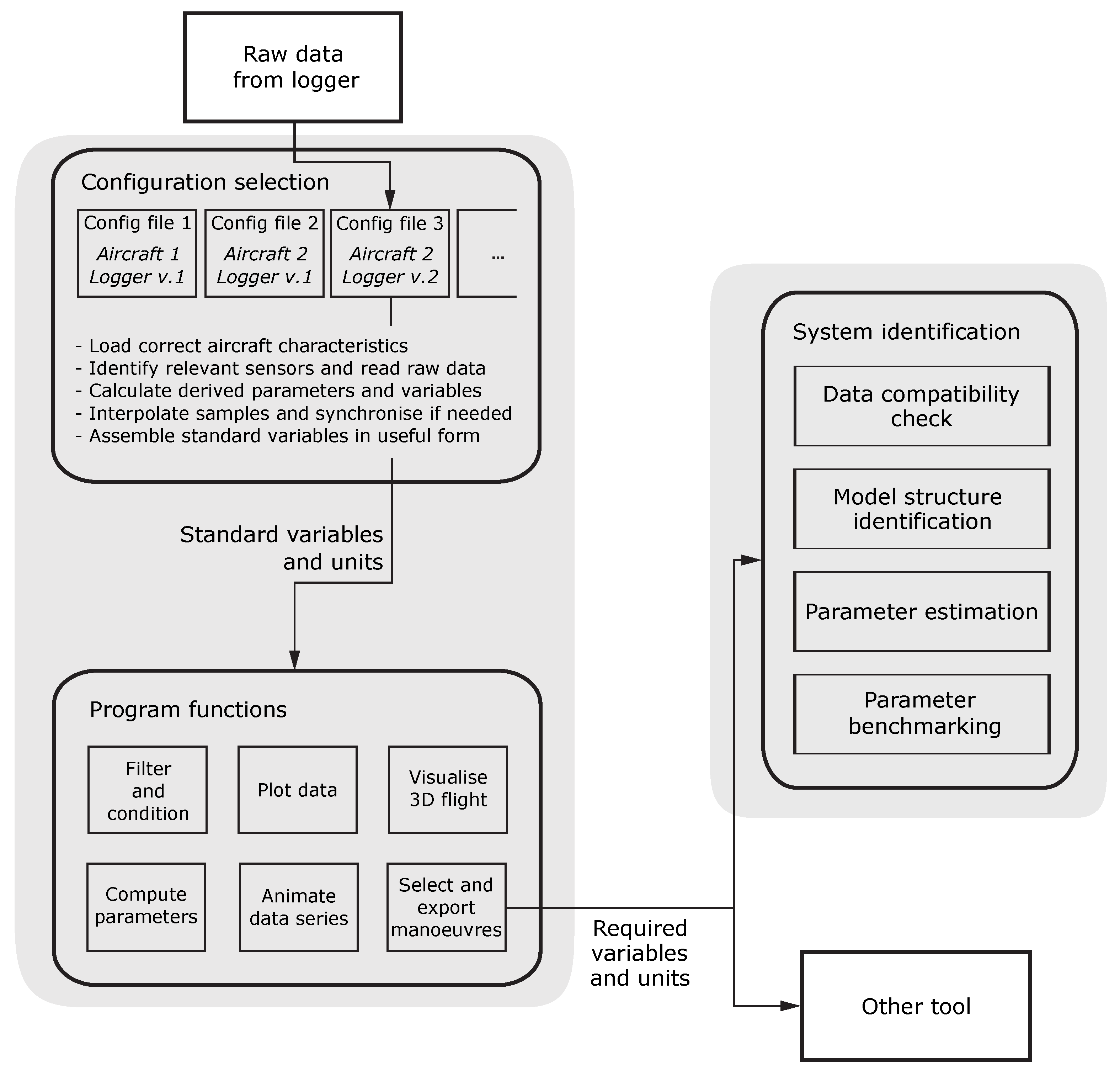
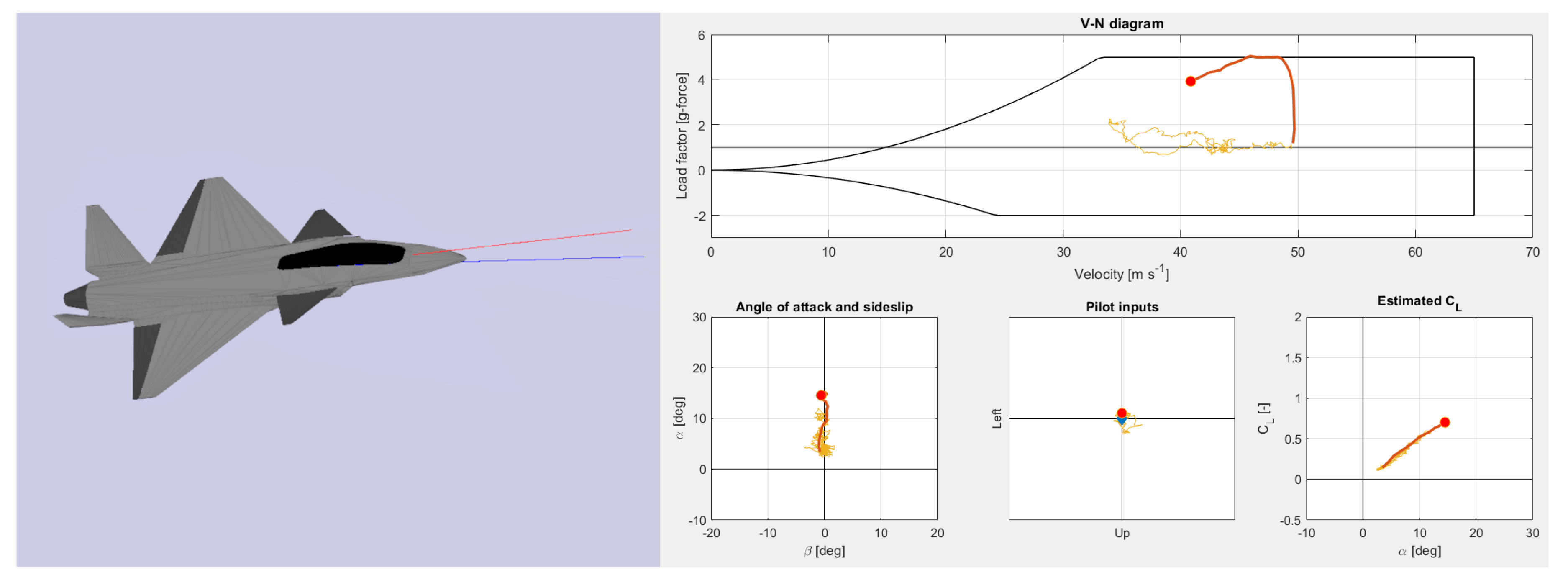
3.3. Approaches to Data Analytics Issues
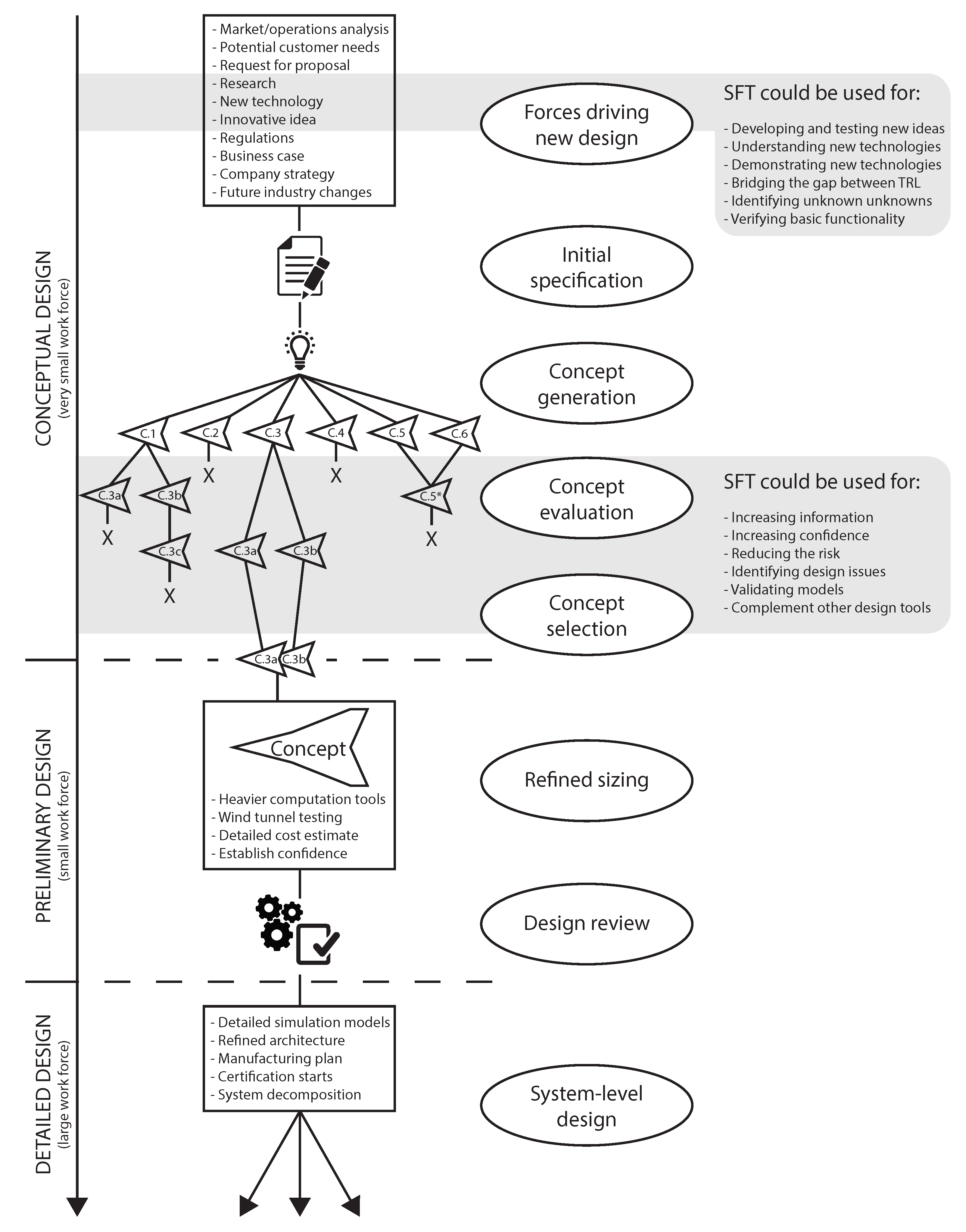
4. The Role of SFT in Aircraft Development and Opportunities for Future Research
- Implications of partial similarity and scaling inaccuracies on the measurability, fidelity and extrapolability of flight characteristics: Beyond basic aerodynamic considerations such as Reynolds number or compressibility deviations, the effects of not fulfilling other similarity parameters is still a controversial topic, especially if the purpose of the SFT experiment is to estimate the flight or handling characteristics of a full-scale vehicle. While this topic has been widely discussed in the wind-tunnel literature, little open information is available for free-flight models. Recent publications [8,135,174] show ongoing efforts to identify and quantify these effects using different approaches.
- Benefits of early subscale experimentation in the maturation of new technology using a demonstrative scaling approach: While the growing interest in using demonstrative subscale platforms to increase the technology readiness level (TRL) of new technologies may indicate that the method has a positive effect in the development process, no scientific studies have tried to interpret or quantify these benefits in comparison to other development strategies.
- Suitability of SFT for the evaluation of handling qualities with a human pilot in the loop: The usefulness of SFT for experimenting with automatic flight control laws is, at this point, indisputable. However, its suitability for obtaining human-pilot ratings of handling qualities is unclear. Earlier experiences from NASA [2] suggest that SFT may not be appropriate for this purpose while Mandal et al. [70] suggest wide variations in pilot behaviour. Specific studies taking into account modern control and information augmentation systems would be desirable.
- Specific flight-testing methods, measurement and analysis techniques for efficient subscale experiments: The testing environment, procedures and even the measurement solutions often seem to play an important role in both the capabilities and the results of SFT. While this is a wide area ranging from unmanned aircraft operations to manoeuvre design and data acquisition techniques, its understanding is key to enabling efficient and useful SFT experiments.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AOA | Angle of attack |
| BVLOS | Beyond visual line-of-sight |
| CFD | Computational fluid dynamics |
| COTS | Commercial off-the-shelf |
| EVLOS | Extended visual line-of-sight |
| GFF | Generic Future Fighter |
| RC | Radio control |
| RPA | Remotely piloted aircraft |
| SFT | Subscale flight testing |
| TRL | Technology readiness level |
| UAV | Unmanned aerial vehicle |
| VLOS | Visual line-of-sight |
| Symbols | |
| a | Linear acceleration [m s] |
| Angle of attack [ or rad] | |
| Generalised aircraft attitude relative to airstream [ or rad] | |
| Angle of sideslip [ or rad] | |
| Lift coefficient [-] | |
| c | Speed of sound (in the pertinent fluid) [m s] |
| Control surface deflection angle [ or rad] | |
| E | Modulus of elasticity [Pa] |
| Bending stiffness [N m] | |
| F | Force [N] |
| Froude number [-] | |
| g | Acceleration due to gravity [m s] |
| Torsional stiffness [N m] | |
| I | Mass moment of inertia [kg m] |
| l | Characteristic linear dimension [m] |
| M | Mach number (context dependent) [-] |
| M | Moment (context dependent) [N m] |
| m | Mass [kg] |
| Dynamic (absolute) viscosity [Pa s] | |
| Kinematic viscosity [m s] | |
| Generalised angular rate [rad s] | |
| Frequency of oscillation [rad s] | |
| Generalised angular acceleration [rad s] | |
| Reynolds number [-] | |
| Mass density (of the pertinent fluid) [kg m] | |
| t | Time [s] |
| Time constant or reduced-time factor [-] | |
| V | Linear velocity [m s] |
References
- Wolowicz, C.H.; Bowman, J.S.; Gilbert, W.P. Similitude Requirements and Scaling Relationships as Applied to Model Testing; Technical Paper 1435; NASA: Washington, DC, USA, 1979.
- Chambers, J.R. Modeling Flight: The Role of Dynamically Scaled Free-Flight Models in Support of NASA’s Aerospace Programs, 1st ed.; NASA: Washington, DC, USA, 2009.
- Buckingham, E. On physically similar systems: Illustrations of the use of dimensional equations. Phys. Rev. 1914, 4, 345–376. [Google Scholar] [CrossRef]
- Kline, S.J. Similitude and Approximation Theory; McGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- Gainer, T.G.; Hoffman, S. Summary of Transformation Equations and Equations of Motion Used in Free-Flight and Wind-Tunnel Data Reduction and Analysis; Technical Report; NASA: Washington, DC, USA, 1972.
- Chambers, J.R. Cave of the Winds: The Remarkable History of the Langley Full-Scale Wind Tunnel; NASA: Washington, DC, USA, 2014.
- Lundström, D.; Amadori, K. Raven—A Subscale Radio Controlled Business Jet Demonstrator. In Proceedings of the 26th Congress of the International Council of the Aeronautical Sciences, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Schmollgruber, P.; Lepage, A.; Bremmers, F.; Jentink, H.; Genito, N.; Rispoli, A.; Huhnd, M.; Meissner, D. Towards validation of scaled flight testing. In Proceedings of the 7th CEAS Air and Space Conference, First Aerospace Europe Conference, AEC2020, Bordeaux, France, 25–28 February 2020. [Google Scholar]
- Olejnik, A.; Kachel, S.; Rogólski, R.; Milczarczyk, J. The concept and methodical assumptions for the development of dynamically scaled aircraft model (passenger aircraft). MATEC Web Conf. 2019, 304. [Google Scholar] [CrossRef]
- Olejnik, A.; Kachel, S.; Rogólski, R.; Milczarczyk, J. Conception of developing the dynamically similar downscaled medium-range passenger airplane model for in-flight testing. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020. [Google Scholar] [CrossRef]
- Mieloszyk, J.; Tarnowski, A.; Tomaszewski, A.; Goetzendorf-Grabowski, T. Validation of flight dynamic stability optimization constraints with flight tests. Aerosp. Sci. Technol. 2020, 106, 106193. [Google Scholar] [CrossRef]
- Wilson, T.; Kirk, J.; Hobday, J.; Castrichini, A. Small scale flying demonstration of semi aeroelastic hinged wing tips. In Proceedings of the 18th International Forum on Aeroelasticity and Structural Dynamics, Savannah, GA, USA, 10–13 June 2019. [Google Scholar]
- Sendner, F.M.; Stahl, P.; Rößler, C.; Hornung, M. Designing an UAV Propulsion System for Dedicated Acceleration and Deceleration Requirements. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Stahl, P.; Sendner, F.M.; Rößler, C.; Hornung, M.; Hermanutz, A. Mission and Aircraft Design of FLEXOP Unmanned Flying Demonstrator to Test Flutter Suppression within Visual Line of Sight. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Roessler, C.; Stahl, P.; Sendner, F.; Hermanutz, A.; Koeberle, S.; Bartasevicius, J.; Rozov, V.; Breitsamter, C.; Hornung, M.; Meddaikar, Y.M.; et al. Aircraft Design and Testing of FLEXOP Unmanned Flying Demonstrator to Test Load Alleviation and Flutter Suppression of High Aspect Ratio Flexible Wings. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Roessler, C.; Bartasevicius, J.; Koeberle, S.J.; Teubl, D.; Hornung, M.; Meddaikar, Y.M.; Dillinger, J.K.; Wustenhagen, M.; Kier, T.M.; Looye, G.; et al. Results of an Aeroelastically Tailored Wing on the FLEXOP Demonstrator Aircraft. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Sodja, J.; Breuker, R.D.; Meddaikar, Y.M.; Dillinger, J.K.; Soal, K.; Govers, Y.; Krueger, W.; Georgopoulos, P.; Koimtzoglou, C.; Roessler, C.; et al. Ground Testing of the FLEXOP Demonstrator Aircraft. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef] [Green Version]
- Takarics, B.; Patartics, B.; Luspay, T.; Vanek, B.; Roessler, C.; Bartasevicius, J.; Koeberle, S.J.; Hornung, M.; Teubl, D.; Pusch, M.; et al. Active Flutter Mitigation Testing on the FLEXOP Demonstrator Aircraft. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef] [Green Version]
- Dantsker, O.D.; Vahora, M.; Mancuso, R. Flight and ground testing data set for subscale GA aircraft: 26. %-scale Cub Crafters CC11-100 Sport Cub S2. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Courtin, C.; Hansman, R.J.; Drela, M. Flight Test Results of a Subscale Super-STOL Aircraft. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Bergmann, D.P.; Denzel, J.; Strohmayer, A. UAS as flexible and innovative test platform for aircraft configuration and systems testing. In Proceedings of the EASN-CEAS 2018. MATEC Web of Conferences, Glasgow, UK, 4–7 September 2018; Volume 233. [Google Scholar] [CrossRef]
- Bergmann, D.P.; Denzel, J.; Baden, A.; Kugler, L.; Strohmayer, A. Innovative scaled test platform e-Genius-Mod-Scaling methods and systems design. Aerospace 2019, 6, 20. [Google Scholar] [CrossRef] [Green Version]
- Stolz, B.; Brodermann, T.; Castiello, E.; Englberger, G.; Erne, D.; Gasser, J.; Hayoz, E.; Muller, S.; Muhlebach, L.; Low, T.; et al. An Adaptive Landing Gear for Extending the Operational Range of Helicopters. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; Number 8594062. pp. 1757–1763. [Google Scholar] [CrossRef] [Green Version]
- Warren, M.M.; Kozel, F.K.; Li, E.Q.; Hall, C.S.; German, B.J. Design and control evaluation of a novel subscale quad-tiltrotor. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Sanders, F.C.; Tischler, M.B.; Berger, T.; Berrios, M.G.; Gong, A. System identification and multi-objective longitudinal control law design for a small fixed-wing UAV. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Pieper, K.; Perry, A.; Ansell, P.; Bretl, T. Design and Development of a Dynamically, Scaled Distributed Electric Propulsion Aircraft Testbed. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar] [CrossRef]
- Monteiro, D.d.M.; Nepomuceno, L.M.; da Silva, R.G.A.; da Silva e Souza, M.; Silvestre, F.J.; Krus, P.; Sobron, A. Subscale Flight Test Model Development and Testing as a Tool for Unconventional Aircraft Design. In Proceedings of the 6th CEAS Air and Space Conference, Aerospace Europe, Bucharest, Romania, 16–20 October 2017. [Google Scholar]
- Warsop, C.; Crowther, W. NATO AVT-239 Task Group: Flight Demonstration of Fluidic Flight Controls on the MAGMA Subscale Demonstrator Aircraft. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Shearwood, T.R.; Nabawy, M.R.; Crowther, W.J.; Warsop, C. Directional Control of Finless Flying Wing Vehicles—An Assessment of Opportunities for Fluidic Actuation. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Shearwood, T.R.; Nabawy, M.R.; Crowther, W.J.; Warsop, C. Yaw control of maneuvering tailless aircraft using induced drag—A control allocation method based on aerodynamic mode shapes. In Proceedings of the AIAA Aviation 2020 Forum, Virtual event, 15–19 June 2020; AIAA: Reston, VA, USA, 2020. [Google Scholar] [CrossRef]
- Brandt, S.S.; McLaughlin, T.E.; Williams, D.R.; Crawford, B.H.; Holmes, J.A. Nato avt-239 task group: Flight test of compressed and bleed-air driven control effectors on the ice/saccon uas subscale aircraft. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Smith, G.; Bixler, B.; Babcock, J.T.; Osteroos, R.; McLaughlin, T.E.; Tischler, M.B. System Identification of the ICE/SACCON UAS Aircraft. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Riddick, S.E.; Busan, R.C.; Cox, D.E.; Laughter, S.A. Learn to Fly Test Setup and Concept of Operations. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Heim, E.H.; Viken, E.; Brandon, J.M.; Croom, M.A. NASA’s Learn-to-Fly Project Overview. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Morelli, E.A. Practical aspects of real-time modeling for the learn-to-fly concept. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Ananda, G.K.; Vahora, M.; Dantsker, O.D.; Selig, M.S. Design methodology and flight test protocols for a dynamically-scaled general aviation aircraft. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Dantsker, O.D.; Ananda, G.K.; Selig, M.S. GA-USTAR phase 1: Development and flight testing of the baseline upset and stall research aircraft. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Qadri, M.; Vahora, M.; Hascaryo, R.W.; Finlon, S.; Dantsker, O.D.; Ananda, G.K.; Selig, M.S. Undergraduate contribution to dynamically scaled general aviation research at the University of Illinois at Urbana-Champaign. In Proceedings of the AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Bramlette, R.B.; Johnston, T.A.; Barrett, R.M. Design, construction, and flight testing of the world’s fastest micro-scale quadcopter. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef]
- Bunge, R.; Savino, F.M.; Kroo, I. Stall/Spin Flight Test Techniques with COTS Model Aircraft and Flight Data Systems. In Proceedings of the AIAA Flight Testing Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar] [CrossRef]
- Bunge, R.; Savino, F.M.; Kroo, I. Approaches to Automatic Stall/Spin Detection Based on Small-Scale UAV Flight Testing. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Bunge, R.A.; Kroo, I.M. Automatic spin recovery with minimal altitude loss. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Krause, C.; Gottlicher, C.; Holzapfel, F. Designing a low cost fixed wing flying testbed—Using only commercial off-the-shelf components. In Proceedings of the 2015 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology (ICARES), Bali, Indonesia, 3–5 December 2015. [Google Scholar] [CrossRef]
- Göttlicher, C.; Holzapfel, F. Flight Path Reconstruction for an Unmanned Aerial Vehicle Using Low-Cost Sensors. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Dantsker, O.D.; Mancuso, R. Flight data acquisition platform development, integration, and operation on small-to medium-sized unmanned aircraft. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef] [Green Version]
- Gramüller, B.; Stroscher, F.; Schmidt, J.; Ungwattanapanit, T.; Loebel, T.; Hanke, M. Design Process and Manufacturing of an Unmanned Blended Wing-Body Aircraft. In German Aerospace Congress (DLRK); DLR: Rostock, Germany, 2015. [Google Scholar]
- Bierig, A.; Nikodem, F.; Gallun, P.; Greiner-Perth, C. Design of the general systems for the SAGITTA demonstrator UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017. [Google Scholar] [CrossRef]
- Kügler, M.E.; Holzapfel, F. Planning, Implementation, and Execution of an Automatic First Flight of a UAV. In Proceedings of the 31st Congress of the International Council of the Aeronautical Science, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Kügler, M.E.; Heller, M.; Holzapfel, F. Automatic Take-off and Landing on the Maiden Flight of a Novel Fixed-Wing UAV. In Proceedings of the AIAA Aviation Forum, Flight Testing Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Benad, J. The Flying V: A new aircraft configuration for commercial passenger transport. In German Aerospace Congress (DLRK); Number 370094; DLR: Rostock, Germany, 2015. [Google Scholar]
- Galiński, C.; Hajduk, J.; Kalinowski, M.; Wichulski, M.; Stefanek, L. Inverted joined wing scaled demonstrator programme. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences, St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Galiński, C.; Stalewski, W.; Lis, M.; Hajduk, J. Overview of the Inverted Joined Wing Scaled Demonstrator Programme. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Galinski, C.; Lis, M.; Hajduk, J. Electric Propulsion Concepts for an Inverted Joined Wing Airplane Demonstrator. Energies 2017, 10, 762. [Google Scholar] [CrossRef] [Green Version]
- Aktas, Y.O.; Ozdemir, U.; Dereli, Y.; Tarhan, A.F.; Cetin, A.; Vuruskan, A.; Yuksek, B.; Cengiz, H.; Basdemir, S.; Ucar, M.; et al. Rapid Prototyping of a Fixed-Wing VTOL UAV for Design Testing. J. Intell. Robot. Syst. Theory Appl. 2016, 84, 639–664. [Google Scholar] [CrossRef]
- Mancuso, R.; Dantsker, O.D.; Caccamo, M.; Selig, M.S. A low-power architecture for high frequency sensor acquisition in many-DOF UAVs. In Proceedings of the 2014 ACM/IEEE International Conference on Cyber-Physical Systems, ICCPS 2014, Berlin, Germany, 14–17 April 2014; pp. 103–114. [Google Scholar] [CrossRef]
- Dantsker, O.D.; Mancuso, R.; Selig, M.S.; Caccamo, M. High-Frequency Sensor Data Acquisition System (SDAC) for Flight Control and Aerodynamic Data Collection. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- Dantsker, O.D.; Louis, A.V.; Mancuso, R.; Caccamo, M.; Selig, M.S. SDAC-UAS: A Sensor Data Acquisition Unmanned Aerial System for Flight State Monitoring and Aerodynamic Data Collection. In Proceedings of the AIAA Infotech at the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Arifianto, O.; Farhood, M. Development and Modeling of a Low-Cost Unmanned Aerial Vehicle Research Platform. J. Intell. Robot. Syst. 2015, 80, 139–164. [Google Scholar] [CrossRef]
- Arifianto, O.; Farhood, M. Optimal control of a small fixed-wing UAV about concatenated trajectories. Control Eng. Pract. 2015, 40, 113–132. [Google Scholar] [CrossRef]
- Fredericks, W.J.; Moore, M.D.; Busan, R.C. Benefits of Hybrid-Electric Propulsion to Achieve 4x Increase in Cruise Efficiency for a VTOL UAV. In Proceedings of the 2013 International Powered Lift Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar] [CrossRef]
- Rothhaar, P.M.; Murphy, P.C.; Bacon, B.J.; Gregory, I.M.; Grauer, J.A.; Busan, R.C.; Croom, M.A. NASA langley distributed propulsion VTOL tilt-wing aircraft testing, modeling, simulation, control, and flight test development. In Proceedings of the 14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Busan, R.C.; Rothhaar, P.M.; Croom, M.A.; Murphy, P.C.; Grafton, S.B.; O’Neal, A.W. Enabling Advanced Wind-Tunnel Research Methods Using the NASA Langley 12-Foot Low Speed Tunnel. In Proceedings of the 14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Kuehme, D.; Alley, N.R.; Phillips, C.; Cogan, B. Flight test evaluation and system identification of the Area-I Prototype-Technology-Evaluation Research Aircraft (PTERA). In Proceedings of the AIAA Flight Testing Conference 2014, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef]
- Dantsker, O.D.; Johnson, M.J.; Selig, M.S.; Bretl, T.W. Development of the UIUC Aero Testbed: A Large-Scale Unmanned Electric Aerobatic Aircraft for Aerodynamics Research. In Proceedings of the 31st AIAA Applied Aerodynamics Conference, San Diego, CA, USA, 24–27 June 2013. [Google Scholar] [CrossRef]
- Ragheb, A.M.; Dantsker, O.D.; Selig, M.S. Stall/spin flight testing with a subscale aerobatic aircraft. In Proceedings of the 31st AIAA Applied Aerodynamics Conference, San Diego, CA, USA, 24–27 June 2013. [Google Scholar] [CrossRef]
- Ouellette, J.A.; Patil, M.J.; Kapania, R.K. Scaling Laws for Flight Control Development and Testing in the Presence of Aeroservoelastic Interactions. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- Ouellette, J.A.; Patil, M.J.; Woolsey, C. Flight testing of a subscale aeroservoelastic aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef]
- Mandal, T.; Gu, Y.; Chao, H.; Rhudy, M. Flight data analysis of pilot-induced-oscillations of a remotely controlled aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Larrabee, T.; Chao, H.; Mandal, T.; Gururajan, S.; Gu, Y.; Napolitano, M. Design, simulation, and flight test validation of a UAV ground control station for aviation safety research and pilot modeling. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Mandal, T.; Gu, Y. Pilot-vehicle system modeling using sub-scale flight experiments. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef]
- Honda, M.; Yoshida, K. D-SEND project for low sonic boom design technology. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; pp. 181–188. [Google Scholar]
- Honda, M.; Yoshida, K. D-SEND2 flight demonstration for low sonic boom design technology. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences, St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Burrage, B. 1/10 th scale model tests of a centre-line tiltrotor: Conversion between rotary and fixed wing modes. In Proceedings of the 37th European Rotorcraft Forum 2011, Vergiate and Gallarate, Italy, 13–15 September 2011; pp. 118–125. [Google Scholar]
- Lykins, R.; Keshmir, S.; Riley, R.; Garcia, G. Modal analysis of 1/3-scale Yak-54 aircraft through simulation and flight testing. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference. AIAA, Portland, OR, USA, 8–11 August 2011. [Google Scholar]
- Thompson, E.C.; McCafferty, J.P.; Sellers, J.B.A. Advanced aircraft analysis of the Yak-54 40%. In Proceedings of the AIAA Modeling and Simulation Technologies (MST) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Cesnik, C.E.S.; Senatore, P.J.; Su, W.; Atkins, E.M.; Shearer, C.M. X-HALE: A Very Flexible Unmanned Aerial Vehicle for Nonlinear Aeroelastic Tests. AIAA J. 2012, 50, 2820–2833. [Google Scholar] [CrossRef] [Green Version]
- Beranek, J.; Nicolai, L.; Buonanno, M.; Burnett, E.; Atkinson, C.; Holm-Hansen, B.; Flick, P. Conceptual Design of a Multi-Utility Aeroelastic Demonstrator. In Proceedings of the 13th AIAA/ISSMO Multidisciplinary Analysis Optimization Conference, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar] [CrossRef]
- Li, W.W.; gi Pak, C. Aeroelastic Optimization Study Based on the X-56A Model. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef] [Green Version]
- Hashemi, K.E.; gi Pak, C.; Akella, M.R. Delta Adaptive Flexible Motion Control for the X-56A Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Pak, C.; Truong, S. Creating a Test-Validated Finite-Element Model of the X-56A Aircraft Structure. J. Aircr. 2015, 52, 1644–1667. [Google Scholar] [CrossRef] [Green Version]
- Reasor, D.A.; Bhamidipati, K.K.; Chin, A.W. X-56A Aeroelastic Flight Test Predictions. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Grauer, J.A.; Boucher, M. Aeroelastic Modeling of X-56A Stiff-Wing Configuration Flight Test Data. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef] [Green Version]
- Chin, A.W.; Truong, S.; Spivey, N. X-56A Structural Dynamics Ground Testing Overview and Lessons Learned. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Grauer, J.A.; Boucher, M. System Identification of Flexible Aircraft: Lessons Learned from the X-56A Phase 1 Flight Tests. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Moore, M.D. NASA puffin electric tailsitter VTOL concept. In Proceedings of the 10th AIAA Aviation Technology, Integration and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010; Volume 3. [Google Scholar] [CrossRef] [Green Version]
- Kisska, M. Flight Testing the X-48C: Advancing the BWB Concept. In Proceedings of the AIAA Southern California Aerospace Systems and Technology Conference, Santa Ana, CA, USA, 4 May 2013. [Google Scholar]
- Koster, J.; Balaban, S.; Hillery, D.; Humbargar, C.; Nasso, D.; Serani, E.; Velazco, A. Design of a blended wing body UAS with hybrid propulsion. In Proceedings of the ASME 2011 International Mechanical Engineering Congress and Exposition, IMECE 2011, Denver, CO, USA, 11–17 November 2011; pp. 331–337. [Google Scholar] [CrossRef]
- Koster, J.; Velazco, A.; Kosyan, M.; Balaban, S.; McDowell, L. The Hyperion 2 Green Aircraft Project. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar] [CrossRef]
- Koster, J.N.; Soin, G. Hyperion—three years of novel aircraft design. In Proceedings of the 55th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef]
- Amadori, K.; Jouannet, C.; Berry, P. Development of a subscale flight testing platform for a generic future fighter. In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Jouannet, C.; Berry, P.; Melin, T.; Amadori, K.; Lundström, D.; Staack, I. Subscale flight testing used in conceptual design. Aircr. Eng. Aerosp. Technol. 2012, 84, 192–199. [Google Scholar] [CrossRef]
- Lundström, D.; Sobron, A.; Krus, P.; Jouannet, C.; da Silva, R.G.A. Subscale Flight Testing of a Generic Fighter Aircraft. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Sobron, A.; Lundström, D.; Larsson, R.; Krus, P.; Jouannet, C. Methods for efficient flight testing and modelling of remotely piloted aircraft within visual line-of-sight. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Larsson, R.; Sobron, A.; Lundström, D.; Enqvist, M. A Method for Improved Flight Testing of Remotely Piloted Aircraft Using Multisine Inputs. Aerospace 2020, 7, 135. [Google Scholar] [CrossRef]
- Staack, I.; Lundström, D. Subscale Flight Testing at Linköping University. In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Lu, Y.; Zhang, S.G.; Hao, L.; Huangfu, H.Y.; Sheng, H. System dynamics modeling of the safety evolution of blended-wing-body subscale demonstrator flight testing. Saf. Sci. 2016, 89, 219–230. [Google Scholar] [CrossRef]
- Jouannet, C.; Lundström, D.; Amadori, K.; Berry, P. Design of a Very Light Jet and a Dynamically Scaled Demonstrator. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008. [Google Scholar]
- Richards, J.; Suleman, A.; Canfield, R.; Blair, M. Design of a scaled RPV for investigation of gust response of joined-wing sensorcraft. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Palm Springs, CA, USA, 4–7 May 2009. [Google Scholar]
- Richards, J.; Aarons, T.; Suleman, A.; Canfield, R.A.; Woolsey, C.; Lindsley, N.; Blair, M. Design for flight test of a scaled Joined Wing SensorCraft. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011. [Google Scholar] [CrossRef]
- Richards, J.; Aarons, T.; Garnand-Royo, J.; Suleman, A.; Canfield, R.A.; Woolsey, C. Airworthiness evaluation of a scaled joined-wing aircraft. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 2012, Honolulu, HI, USA, 23–26 April 2012. [Google Scholar]
- Ricciardi, A.P.; Canfield, R.A.; Patil, M.J.; Lindsley, N. Nonlinear aeroelastic scaling of a joined-wing aircraft. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 2012, Honolulu, HI, USA, 23–26 April 2012. [Google Scholar]
- Ricciardi, A.P.; Eger, C.A.G.; Canfield, R.A.; Patil, M.J.; Lindsley, N. High fidelity nonlinear aeroelastic analysis for scaled vehicle design. In Proceedings of the 12th AIAA Aviation Technology, Integration and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012. [Google Scholar]
- Eger, C.A.G.; Ricciardi, A.P.; Canfield, R.A.; Patil, M.J. Design of a scaled flight test vehicle including linear aeroelastic effects. In Proceedings of the 54rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Boston, MA, USA, 8–11 April 2013. [Google Scholar] [CrossRef] [Green Version]
- Yarf-Abbasi, A.; Fielding, J.P. Design Integration of the Eclipse and Demon Demonstrator UAVs. In Proceedings of the 7th AIAA Aviation Technology, Integration and Operations Conference (ATIO), Belfast, UK, 18–20 September 2007. [Google Scholar] [CrossRef]
- Yarf-Abbasi, A.; Clarke, A.; Lawson, C.P.; Fielding, J.P. Design and Development of the Eclipse and Demon Demonstrator UAVs. In Proceedings of the 26th Congress of the International Council of the Aeronautical Sciences, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Fielding, J.P.; Lawson, C.P.; Pires, R.; Monterzino, G. Development of the Demon Technology Demonstrator UAV. In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Trittler, M.; Fichter, W.; Voit-Nitschmann, R.; Schmoldt, R.; Kittmann, K. Preliminary System Identification of the Blended Wing Body Flight Demonstrator VELA 2 from Flight Data. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef]
- Risch, T.; Cosentino, G.; Regan, C.; Kisska, M.; Princen, N. X-48B Flight Test Progress Overview. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar] [CrossRef] [Green Version]
- Goldthorpe, S.; Rossitto, K.; Hyde, D.; Krothapalli, K. X-48B Blended Wing Body Flight Test Performance of Maximum Sideslip and High to Post Stall Angle-of-Attack Command Tracking. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar] [CrossRef]
- Taylor, B.R.; Ratnayake, N.A. Simulation and flight evaluation of a parameter estimation input design method for hybrid-wing-body aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference 2010, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Owens, B.; Cox, D.; Morelli, E. Development of a Low-Cost Sub-Scale Aircraft for Flight Research: The FASER Project. In Proceedings of the 25th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, San Fracisco, CA, USA, 5–8 June 2006. [Google Scholar] [CrossRef] [Green Version]
- Dorobantu, A.; Johnson, W.; Lie, F.A.; Taylor, B.; Murch, A.; Paw, Y.C.; Gebre-Egziabher, D.; Balas, G. An airborne experimental test platform: From theory to flight. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 659–673. [Google Scholar] [CrossRef]
- Cunningham, K.; Foster, J.V.; Morelli, E.A.; Murch, A.M. Practical Application of a Subscale Transport Aircraft for Flight Research in Control Upset and Failure Conditions. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef] [Green Version]
- Murch, A. A Flight Control System Architecture for the NASA AirSTAR Flight Test Infrastructure. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef] [Green Version]
- Norouzi, R. Reconfiguring NASA Generic Transport Model for Normal Flight Envelope Simulation and Analysis. In Proceedings of the 9th International Conference on Mechanical and Aerospace Engineering, ICMAE 2018, Budapest, Hungary, 10–13 July 2018; pp. 45–52. [Google Scholar] [CrossRef]
- Cox, D.; Cunningham, K.; Jordan, T. Subscale Flight Testing for Aircraft Loss of Control: Accomplishments and Future Directions. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef] [Green Version]
- Cunningham, K.; Cox, D.; Murri, D.; Riddick, S. A Piloted Evaluation of Damage Accommodating Flight Control Using a Remotely Piloted Vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011. [Google Scholar] [CrossRef] [Green Version]
- Gregory, I.; Gadient, R.; Lavretsky, E. Flight Test of Composite Model Reference Adaptive Control (CMRAC) Augmentation Using NASA AirSTAR Infrastructure. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011. [Google Scholar] [CrossRef] [Green Version]
- Gregory, I.M.; Xargay, E.; Cao, C.; Hovakimyan, N. Flight test of an L1 adaptive controller on the NASA AirSTAR flight test vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar] [CrossRef]
- Gregory, I.; Cao, C.; Xargay, E.; Hovakimyan, N.; Zou, X. L1 Adaptive Control Design for NASA AirSTAR Flight Test Vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar] [CrossRef]
- Jordan, T.L.; Bailey, R.M. NASA Langley’s AirSTAR Testbed: A Subscale Flight Test Capability for Flight Dynamics and Control System Experiments. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef] [Green Version]
- Jordan, T.L.; Foster, J.V.; Bailey, R.M.; Belcastro, C.M. AirSTAR: A UAV Platform for Flight Dynamics and Control System Testing. In Proceedings of the 25th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, San Fracisco, CA, USA, 5–8 June 2006. [Google Scholar] [CrossRef]
- Goraj, Z.; Kitmann, K.; Voit-Nitschmann, R.; Szender, M. Design and integration of flexi bird—A low cost sub-scale research aircraft for safety and environmental issues. In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Schmollgruber, P.; Gobert, J.L.; Gall, P.E.; Goraj, Z.; Jentink, H.W.; Näs, A.; Voit-Nitchmann, R. An innovative evaluation platform for new aircraft concepts. Aeronaut. J. 2010, 114, 451–456. [Google Scholar] [CrossRef]
- Kittmann, K.; Breeman, J.; Schmollgruber, P. The NACRE Innovative Evaluation Platform and its Navigation and Control Strategies. In Proceedings of the SAE 2011 Aerotech Congress & Exposition, Toulouse, France, 18–21 October 2011. [Google Scholar] [CrossRef]
- Schmidt, A.; Brunswig, H. The AC20.30 Blended Wing Body configuration: Development and Current Status 2006. In Proceedings of the 25th Congress of the International Council of the Aeronautical Science (ICAS), Hamburg, Germany, 3–8 September 2006. [Google Scholar]
- Sobron, A.; Lundström, D.; Staack, I.; Krus, P. Design and Testing of a Low-Cost Flight Control and Data Acquisition System for Unstable Subscale Aircraft. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Barlow, J.B.; Rae, W.H.; Pope, A. Low-Speed Wind Tunnel Testing, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1999; p. 713. [Google Scholar]
- Haines, A.B. Scale Effects on Aircraft and Weapon Aerodynamics; Technical Report, AGARD-AG-323; AGARD: Neuilly sur Seine, France, 1994. [Google Scholar]
- Munro, C.D.; Jouannet, C.; Krus, P. Implications of scale effect for the prediction of high angle of attack aerodynamics. Prog. Aerosp. Sci. 2005, 41, 301–322. [Google Scholar] [CrossRef]
- Ladson, C.L. Effects of Independent Variation of Mach and Reynolds Numbers on the Low-Speed Aerodynamic Characteristics of the NACA 0012 Airfoil Section; Technical Report; NASA: Washington, DC, USA, 1988.
- Jones, G.W.; Cincotta, J.J.; Walker, R.W. Aerodynamic Forces on a Stationary and Oscillating Circular Cylinder at High Reynolds Numbers; Technical Report; NASA: Washington, DC, USA, 1969.
- Heine, B.; Mack, S.; Kurz, A.; Gross, A.; Fasel, H.F. Aerodynamic Scaling of General Aviation Airfoil for Low Reynolds Number Application. In Proceedings of the 38th AIAA Fluid Dynamics Conference and Exhibit, Seattle, WA, USA, 23–26 June 2008. [Google Scholar]
- Vahora, M.; Ananda, G.K.; Selig, M.S. Design methodology for aerodynamically scaling of a general aviation aircraft airfoil. In Proceedings of the AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Raju Kulkarni, A.; Rocca, G.L.; Veldhuis, L.L.M. Degree of similitude estimation for sub-scale flight testing. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef] [Green Version]
- Erickson, G.E.; Hall, R.M.; Banks, D.W.; Del Frate, J.H.; Schreiner, J.A.; Hanley, R.J.; Pulley, C.T. Experimental investigation of the F/A-18 vortex flows at subsonic through transonic speeds. In Proceedings of the 7th Applied Aerodynamics Conference, Seattle, WA, USA, 31 July–2 August 1989. [Google Scholar] [CrossRef]
- Phillips, W.H. Effects of model scale on flight characteristics and design parameters. J. Aircr. 1994, 31, 454–457. [Google Scholar] [CrossRef]
- Lu, H.H.; Harris, J.; Goecks, V.G.; Bowden, E.; Valasek, J. Flight test instrumentation system for small UAS system identification. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems, ICUAS 2017, Miami, FL USA, 13–16 June 2017; pp. 1696–1705. [Google Scholar] [CrossRef]
- Zeitler, A.; Hiergeist, S.; Schwierz, A. COTS components for a large scale UAS demonstrator datalink system. In Proceedings of the AIAA/IEEE 36th Digital Avionics Systems Conference, St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar] [CrossRef]
- Pettersson, K.; Rizzi, A. Aerodynamic scaling to free flight conditions: Past and present. Prog. Aerosp. Sci. 2008, 44, 295–313. [Google Scholar] [CrossRef]
- Love, M.H.; Zink, P.S.; Wieselmann, P.A.; Youngren, H. Body Freedom Flutter of High Aspect Ratio Flying Wings. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005. [Google Scholar] [CrossRef]
- Jones, J.; Cesnik, C.E. Nonlinear Aeroelastic Analysis of the X-56 Multi-Utility Aeroelastic Demonstrator. In Proceedings of the 15th Dynamics Specialists Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef] [Green Version]
- Murrow, H.N. Status and future plans of the Drones for Aerodynamic and Structural Testing (DAST) program. In Advanced Aerodynamics and Active Controls. Selected NASA Research. NASA Conference Publication 2172.; NASA: Washington, DC, USA, 1981; pp. 21–36. [Google Scholar]
- Bennett, R.M.; Abel, I. Application of a Flight Test and Data Analysis Technique to Flutter of a Drone Aircraft. In Proceedings of the Dynamics Specialists Conference, Atlanta, GA, USA, 9–10 April 1981. [Google Scholar] [CrossRef] [Green Version]
- Gilyard, G.B.; Edwards, J.W. Real-Time Flutter Analysis of an Active Flutter-Suppression System on a Remotely Piloted Research Aircraft. Technical Memorandum, TM-84901; NASA: Washington, DC, USA, 1983.
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Ingham, L.A.; Jones, T.; Maneschijn, A. Considerations for flight testing of UAVs in South African airspace. Aeronaut. J. 2006, 110, 803–811. [Google Scholar] [CrossRef]
- ICAO. Doc 10019, Manual on Remotely Piloted Aircraft Systems (RPAS), 1st ed.; International Civil Aviation Organization: Montréal, QC, Canada, 2015. [Google Scholar]
- Eurocontrol. RPAS ATM CONOPS, 4th ed.; EUROCONTROL: Brussels, Belgium, 2017. [Google Scholar]
- Ward, D.T. Introduction to Flight Test Engineering, 1st ed.; Elsevier: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Stoliker, F.N. Introduction to Flight Test Engineering. In RTO AGARDograph 300, Flight Test Techniques Series; RTO/NATO: Neuilly sur Seine, France, 2005; Volume 14. [Google Scholar]
- Williams, W.; Harris, M. The Challenges of Flight-Testing Unmanned Air Vehicles. In Proceedings of the Systems Engineering, Test and Evaluation Conference, Sydney, Australia, 29–30 October 2002. [Google Scholar]
- Pontzer, A.E.; Lower, M.D.; Miller, J.R. Unique Aspects of Flight Testing Unmanned Aircraft Systems. In RTO AGARDograph 300, Flight Test Techniques Series; RTO/NATO: Neuilly sur Seine, France, 2010; Volume 27. [Google Scholar]
- Dauer, J.C.; Adolf, F.M.; Lorenz, S. Flight Testing of an Unmanned Aircraft System—A Research Perspective; STO Meeting Proceedings STO-MP-SCI-269; STO/NATO: Ottawa, ON, Canada, 2015. [Google Scholar] [CrossRef]
- Eagle Tree Systems. Eagle Tree eLogger v3 and v4. Available online: http://www.eagletreesystems.com (accessed on 1 March 2018).
- RCATS Systems. RCATS UAV Data Systems. Available online: https://www.rcatsystems.com/uav.php (accessed on 18 December 2020).
- Collins Aerospace. Cloud Cap Technology Piccolo Autopilot Systems. Available online: http://www.cloudcaptech.com/products/auto-pilots (accessed on 20 January 2021).
- Laughter, S.A. Expanding Airstar capability for flight research in an existing avionics design. In Proceedings of the 2012 IEEE/AIAA 31st Digital Avionics Systems Conference (DASC), Williamsburg, VA, USA, 14–18 October 2012; pp. 8C1-1–8C1-9. [Google Scholar] [CrossRef] [Green Version]
- Koeberle, S.J.; Rumpf, M.; Scheufele, B.; Hornung, M. Design of a Low-Cost RPAS Data Acquisition System for Education. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- École Nationale de l’Aviation Civile and Paparazzi Develpers Community. Paparazzi Project, Open-Source Autopilot System. Available online: http://wiki.paparazziuav.org/ (accessed on 1 March 2018).
- Meier, L.; ETH Zürich; 3D Robotics, Inc. PX4/Pixhawk Open-Hardware Autopilot Project. Available online: http://pixhawk.org/ (accessed on 1 March 2018).
- Hattenberger, G.; Bronz, M.; Gorraz, M. Using the Paparazzi UAV System for Scientific Research. In Proceedings of the International Micro Air Vehicle Conference and Competition IMAV 2014, Delft, the Netherlands, 12–15 August 2014; pp. 247–252. [Google Scholar]
- Arthurs, F.; Valaseky, J.; Zeiger, M.D. Precision onboard small sensor system for unmanned air vehicle testing and control. In Proceedings of the 2016 AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Dronekit Development Community. DRONEKIT: Developer Tools for Drones. Available online: http://dronekit.io/ (accessed on 10 December 2020).
- Dronecode Project, Inc. Dronecode Foundation Projects. Available online: https://www.dronecode.org/projects/ (accessed on 13 January 2021).
- ArduPilot Dev Team. ArduPilot Open-Source Autopilot Suite: Plane. Available online: http://ardupilot.org/plane/ (accessed on 1 April 2017).
- Michalowski, B.; Varano, N. UAV flight test characterization using minimal test equipment. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017. [Google Scholar] [CrossRef]
- Aeroprobe Corporation. Air Data Probe. Available online: http://www.aeroprobe.com/air-data-probe/ (accessed on 20 January 2021).
- Morelli, E.A.; Cunningham, K. Aircraft dynamic modeling in turbulence. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference 2012, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef] [Green Version]
- Dorobantu, A.; Murch, A.M.; Mettler, B.; Balas, G.J. System Identification for Small, Low-Cost, Fixed-Wing Unmanned Aircraft. J. Aircr. 2013, 50, 1117–1130. [Google Scholar] [CrossRef]
- Morelli, E.A. System IDentification Programs for AirCraft (SIDPAC). In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar] [CrossRef] [Green Version]
- Jategaonkar, R.V. Flight Vehicle System Identification: A Time-Domain Methodology. In Progress in Astronautics and Aeronautics, 2nd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2015; Volume 245. [Google Scholar] [CrossRef]
- Oborne, M.; Dronecode Project Inc. Mission Planner Open-Source Ground Station Software. Available online: http://ardupilot.org/planner/ (accessed on 10 January 2021).
- Raju Kulkarni, A.; Varriale, C.; Voskuijl, M.; la Rocca, G.; Veldhuis, L. Assessment of Sub-scale Designs for Scaled Flight Testing. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Description | Formulation |
|---|---|---|
| (a) | Reynolds number | |
| (b) | Mach number | |
| (c) | Control surface angular deflection | |
| (d) | Relative density or mass ratio | |
| (e) | Relative mass moment of inertia | |
| (f) | Aeroelastic-bending parameter | |
| (g) | Aeroelastic-torsion parameter | |
| (h) | Aircraft attitude relative to the airstream | |
| (i) | Reduced linear acceleration | |
| (j) | Reduced angular velocity | |
| (k) | Reduced angular acceleration | |
| (l) | Reduced oscillatory frequency (Strouhal number) | |
| (m) | Froude number | |
| (n) | Reduced-time parameter |
| Method | Focus | Relevant Similarity Parameters |
|---|---|---|
| Aerodynamic scaling | Similarity of the flow field, disregarding similarity of the aircraft self-motion | (a)(b)(c)(h)(j)(l)(n) |
| Dynamic scaling | Similarity of the rigid aircraft motion as well as the aerodynamic loads that cause it | (a)(b)(c)(d)(e)(h)(i)(j)(k)(l)(m)(n) |
| Aeroelastic scaling | Builds on dynamic scaling and includes similarity for vehicle deformations | All (a) to (n) |
| Demonstrative scaling | Scaled demonstration of a particular technology, system, or capability; partially or fully disregarding the vehicle’s similarity conditions | Variable |
| Organisation | Platform Name | Full-Scale Reference | Scale Factor | Scaling Method | Years Active | References |
|---|---|---|---|---|---|---|
| ONERA, NLR, CIRA, Airbus (EU) | Scaled Flight Demonstrator (SFD) | Airbus 320-200 | 0.12 | Dynamic | Under dev. | [8] |
| Military University of Technology (Poland) | Tu-154M model | Tu-154M | 0.10 | Aeroelastic (partial) | Under dev. | [9,10] |
| Warsaw University of Technology (Poland) | Numerical Design Results Demonstrator (NORD) | n/a | n/a | Demonstrative | 2020–n/a | [11] |
| Airbus (UK) | AlbatrossONE | Twin-engine transport (A321) | 0.07 | Demonstrative | 2019–present | [12] |
| FLEXOP consortium (EU) | FLEXOP demonstrator | n/a | n/a | Demonstrative | 2019–present | [13,14,15,16,17,18] |
| Univ. of Illinois at Urbana–Champaign (USA) | Cub Crafters CC11-100 Sport Cub S2 | Cub Crafters CC11-100 Sport Cub S2 | 0.26 | Demonstrative | 2019–present | [19] |
| Massachusetts Institute of Technology (USA) | KESTREL demonstrator | KESTREL Hybrid eSTOL | 0.30 | Demonstrative | 2019–n/a | [20] |
| Univ. of Stuttgart (Germany) | e-Geius-Mod | e-Genius | 0.33 | Dynamic | 2018–present | [21,22] |
| ETH Zurich (Switzerland) | Scout B1-100 | Adaptive landing gear concept | n/a | Demonstrative | 2018–n/a | [23] |
| Georgia Institute of Technology (USA) | Quad-tiltrotor aircraft | n/a | n/a | Demonstrative | 2018–n/a | [24] |
| San Jose State Research Fdn., U.S. Army Aviation Development Dir. (USA) | C-182 UAV | Cessna 182 | 0.12 | Demonstrative | 2018–n/a | [25] |
| Univ. of Illinois at Urbana–Champaign (USA) | Cirrus SR22T | Cirrus SR22T | 0.21 | Dynamic, demonstrative | 2018–n/a | [26] |
| Aeronautics Institute of Technology (Brazil) | ITA-BWB | ITA-BWB | 0.07 | Demonstrative | 2017–present | [27] |
| Univ. of Manchester, BAE Systems (UK) | MAGMA | Boeing 1303 UCAV | n/a | Demonstrative | 2017–present | [28,29,30] |
| United States Air Force Academy (USA) | Sub-scale ICE aircraft | ICE/SACCON UAV | 0.10-0.14 | Demonstrative | 2017–present | [31,32] |
| NASA (USA) | E1 | Extra 330 SC | 0.40 | Demonstrative | 2017–n/a | [33,34,35] |
| NASA (USA) | Super Guppy Foamie | MiG-27 | n/a | Demonstrative | 2017–n/a | [33,34] |
| NASA (USA) | Wodstock | n/a | n/a | Demonstrative | 2017–2018 | [33,34,35] |
| Univ. of Illinois at Urbana–Champaign (USA) | GA-USTAR aircraft | Cessna 182 | 0.22 | Dynamic | 2017–n/a | [36,37,38] |
| Univ. of Kansas (USA) | XQ-139micro | XQ-139A | n/a | Demonstrative | 2017–n/a | [39] |
| Stanford University (USA) | 1/10-Taylorcraft | Taylorcraft | 0.10 | Demonstrative | 2015–n/a | [40,41,42] |
| Stanford University (USA) | 1/5-Super Cub | Piper Pa-18 Super Cub | 0.20 | Demonstrative | 2015–n/a | [40,41,42] |
| Technical Univ. of Munich (Germany) | HYPE Edge 540 | Zivko Edge 540 | n/a | Demonstrative | 2015–n/a | [43,44] |
| Univ. of Illinois at Urbana–Champaign (USA) | UIUC Subscale Sukhoi | Sukhoi 29S | 0.35 | Demonstrative | 2015–n/a | [45] |
| DLR, Technical University of Munich, Airbus (Germany) | SAGITTA demonstrator | SAGITTA UAV | 0.25 | Demonstrative | 2014–present | [46,47,48,49] |
| Berlin University of Technology (Germany) | Flying V | Flying V | n/a | Demonstrative | 2014–n/a | [50] |
| Inst. of Aviation, Air Force Inst. of Technology, Warsaw University of Technology (Poland) | MOSUPS | MOSUPS, inverted box-wing | n/a | Demonstrative | 2014–n/a | [51,52,53] |
| Istanbul Technical University (Turkey) | TURAC | TURAC VTOL UAV | 0.33-0.50 | Demonstrative | 2014–n/a | [54] |
| Univ. of Illinois at Urbana–Champaign (USA) | Great Planes Avistar Elite | n/a | n/a | Demonstrative | 2014–n/a | [55,56,57] |
| Virginia Tech (USA) | Telemaster | n/a | n/a | Demonstrative | 2014–n/a | [58,59] |
| NASA (USA) | GL-10 Greased Lightning | GL-10 tilt-wing UAV | 0.15-0.50 | Demonstrative | 2013–present | [60,61,62] |
| NASA, Area-I (USA) | Prototype-Technology-Evaluation Research Aircraft (PTERA) | Twin-engine transport (various) | 0.11-0.16 | Dynamic, demonstrative | 2013–present | [63] |
| Univ. of Illinois at Urbana–Champaign (USA) | UIUC Aero Testbed | Extra 260 | 0.35 | Demonstrative | 2013–n/a | [64,65] |
| Virginia Tech (USA) | Sig Rascal 110 | n/a | n/a | Aeroelastic (partial), demonstrative | 2013–n/a | [66,67] |
| West Virginia University (USA) | Phastball | Twin engine transport | n/a | Demonstrative | 2013–n/a | [68,69,70] |
| Japan Aerospace Exploration Agency (Japan) | S3CM | JAXA’s low sonic boom concept | 0.16 | Demonstrative | 2013–2014 | [71,72] |
| Rotorcraft Operations Ltd. (UK) | 1/10th scale centre-line tiltrotor | Centre-line tiltrotor concept | 0.10 | Demonstrative | 2011–n/a | [73] |
| University of Kansas (USA) | Yak-54 UAV | Yak-54 | 0.40 | Demonstrative | 2011–n/a | [74,75] |
| University of Michigan (USA) | X-HALE | n/a | n/a | Demonstrative | 2011–n/a | [76] |
| AFRL, Lockheed Martin, NASA (USA) | X-56A Multi-Utility Technology Testbed (MUTT) | AFRL SensorCraft UAV | n/a | Aeroelastic (partial), demonstrative | 2013–present | [77,78,79,80,81,82,83,84] |
| National Institute of Aerospace (USA) | Puffin demonstrator | NASA Puffin Electric Tailsitter | 0.33 | Demonstrative | 2010–n/a | [85] |
| Japan Aerospace Exploration Agency (Japan) | NWM, LBM | JAXA’s low sonic boom concept | n/a | Demonstrative | 2010–2013 | [71] |
| NASA, Boeing (USA) | X-48C | NASA N+2 | 0.09 | Dynamic | 2010–2013 | [86] |
| University of Colorado (USA) | Hyperion 1.0, 2.0, 2.1 | Hyperion BWB concept | n/a | Demonstrative | 2010–2013 | [87,88,89] |
| Linköping University (Sweden) | Generic Future Fighter (GFF) demonstrator | Generic Future Fighter (GFF) | 0.14 | Demonstrative | 2009–present | [90,91,92,93,94] |
| Linköping University (Sweden) | Rafale | Dassault Rafale M | 0.13 | Demonstrative | 2009–present | [95] |
| Beihang University (China) | BB-1, BB-2, BB-3, BB-4 | BUAA-BWB | 0.03 | Demonstrative | 2008–2012 | [96] |
| Linköping University (Sweden) | Raven | Raven | 0.14 | Dynamic, demonstrative | 2007-2018 | [7,95,97] |
| AFRL, Boeing, Virginia Tech (USA) | SensorCraft RPV | Joined Wing SensorCraft (JWSC) | 0.11 | Aeroelastic (partial) | 2007–n/a | [98,99,100,101,102,103] |
| Cranfield University (UK) | ECLIPSE | FLAVIIR Demonstration Vehicle (DEMON) | 0.87 | Demonstrative | 2007–n/a | [104,105,106] |
| University of Stuttgart (Germany) | VELA 2 | Very Efficient Large Aircraft (VELA) | 0.03 | Demonstrative | 2007–n/a | [107] |
| NASA, Boeing (USA) | X-48B | NASA-Boeing BWB | 0.09 | Dynamic | 2007–2010 | [86,108,109,110] |
| NASA, University of Minnesota (USA) | FASER (Ultrastick 120) | n/a | n/a | Demonstrative | 2006–n/a | [111,112] |
| NASA (USA) | GTM-S2 | Lockheed L-1011 TriStar | n/a | Demonstrative | 2005–n/a | [113,114] |
| NASA (USA) | GTM-T2 | Twin-engine transport (Boeing 757) | 0.06 | Dynamic | 2005–n/a | [113,115,116,117,118,119,120,121,122] |
| NACRE consortium (EU) | Innovative Evaluation Platform (IEP) | Twin-engine transport | n/a | Dynamic, demonstrative | 2005–2010 | [123,124,125] |
| Univ. of Applied Sciences Hamburg (Germany) | AC20.30 | AC20.30 BWB concept | 0.03 | Demonstrative | 2004–2013 | [126] |
| Picture |  |  |  |  |
|---|---|---|---|---|
| Index | (a) | (b) | (c) | (d) |
| Aircraft type | Generic Future Fighter (GFF) | Light business jet | Light-Sport Aircraft (LSA) | Human-Powered Aircraft (HPA) |
| Take-off mass | 15,400 kg | 4000 kg | 290 kg | 100 kg |
| Wingspan | 11 m | 14 m | 5 m | 25 m |
| Cruise speed | 300 m s | 160 m s | 50 m | 8 m s |
| Cruise altitude | 9000 m | 11000 m | 3000 m | 5 m |
| SFT scale factor | 0.14 | 0.14 | 0.33 | 0.24 |
| SFT Take-off mass | 19.2 (42.3) * kg | 11.0 kg | 10.8 kg | 1.4 kg |
| SFT Wingspan | 1.5 m | 1.9 m | 1.7 m | 6.0 m |
| Level | Vehicle Mass | Operation | Procedures, Safety | Examples |
|---|---|---|---|---|
| 4 | >150 kg | BVLOS, segregated airspace, full redundancy | Professional, near full-scale | X-48B/C [86], X-56A [84] |
| 3 | <150 kg | BVLOS/EVLOS, segregated airspace, advanced redundancy | Professional, high-level | SAGITTA [48], IEP [123] |
| 2 | <60 kg | VLOS, over airfield, limited redundancy | Professional, mid- to high-level | GFF [86], FLEXOP [14], MAGMA [28], AlbatrossONE [12] |
| 1 | <25 kg | VLOS, over airfield, limited/no redundancy | Relaxed, similar to leisure aeromodelling | Raven [7], Taylorcraft [40], ITA-BWB [27] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sobron, A.; Lundström, D.; Krus, P. A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical Challenges. Aerospace 2021, 8, 74. https://doi.org/10.3390/aerospace8030074
Sobron A, Lundström D, Krus P. A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical Challenges. Aerospace. 2021; 8(3):74. https://doi.org/10.3390/aerospace8030074
Chicago/Turabian StyleSobron, Alejandro, David Lundström, and Petter Krus. 2021. "A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical Challenges" Aerospace 8, no. 3: 74. https://doi.org/10.3390/aerospace8030074
APA StyleSobron, A., Lundström, D., & Krus, P. (2021). A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical Challenges. Aerospace, 8(3), 74. https://doi.org/10.3390/aerospace8030074