1. Introduction
The thrust acting on a rotor in forward flight may vary with time due to advancing and retreating blade effects acting on the individual rotor blades. While conventional helicopters compensate for these effects with hinged blades, small multirotor vehicles typically use rigid rotors. Without compensation, the thrust output of the rotor is transient, with the amplitude being linked to the forward speed and angle of the vehicle, as well as the rotational velocity of the rotor. Transient thrust has potential implications for both the control systems and the structural design of the rotor blades and central chassis due to fatigue. Despite these potential implications, quantification of the time-dependent thrust on rigid rotors at various tip-plane angles of attack is notably lacking in the literature. The purpose of this study is to investigate and quantify the transient thrust response of small rigid rotors in forward flight under various operating conditions through numerical predictions of unsteady blade and wake effects.
Historically, research into small propellers or rotors has focused on steady-state conditions or time-averaged forces. There has been a substantial amount of research in documenting the performance of small propellers in steady axial flow. One such example is the University of Illinois at Urbana-Champaign (UIUC) Propeller Database created through the work of Brandt, Deters, Ananda, and Selig ([
1,
2]). A few studies have experimentally investigated the time-averaged forces of rigid rotors in forward flight, as are experienced by the rotors of a multirotor vehicle. Experimental data sets of this nature are available through Kolaei et al. [
3] and Serrano et al. [
4].
In one notable recent study, Misiorowski et al. [
5] quantified the transient thrust oscillations of a single isolated rigid rotor at a one operating condition. This analysis was conducted using a Navier–Stokes solver and was done in the course of quantifying rotor interactions on quadrotors. In addition to providing sectional thrust coefficient values as a function of azimuth location, the authors also provided insights on the asymmetric nature of the wake rollup downstream due to advancing and retreating blade effects. These findings highlight a need for more in-depth analysis of small, rigid rotors operating in unsteady conditions.
There are several approaches described in the literature for the prediction of rotor performance in forward flight, which can be grouped according to the assumptions applied in each. Methods based on blade element momentum theory are presented by Carrol [
6] and Serrano et al. [
4]. Both of these methods show good agreement with time-averaged experimental data, but use simplified inflow models that are based on momentum theory and are therefore not suited to investigating transient thrust loads under highly unsteady conditions.
Potential flow-based methods are frequently used in modeling unsteady systems, including rotors in forward flight. One of the most common potential flow methods for this nature of analysis is the unsteady vortex lattice method (UVLM), outlined by Katz and Plotkin [
7]. This method uses constant-strength vortex rings to model lifting surfaces and wakes. Further information, including examples of unsteady applications, are provided by [
8,
9,
10]. The unsteady vortex lattice method has also been extended and improved upon in various ways, including by using vortex particle wake models [
11,
12,
13] and modeling leading-edge vortex shedding [
14].
Other potential flow methods such as RCAS [
15] and CAMRAD [
16] are commonly used in helicopter design and analysis. These methods use lifting line theory for their aerodynamic approximations and can be used with fixed or free vortex wakes. Due to a lack of performance prediction tools directed at small rigid rotors, Russell and Sekula [
17] evaluated CAMRAD II for modeling the time-averaged thrust and power of a rigid rotor in hover, ultimately determining that it is well-suited for this application through comparisons to experimentally-obtained data. Leishman et al. [
18] summarized free-vortex methods and filament-based potential flow methods for helicopter rotor analysis. These methods were born out of the need for higher fidelity wake modeling. Leishman provides a case for the importance of relaxed wake modeling in rotor analysis, asserting that interactions between the wake vortices and the rotor cannot be easily generalized and the use of a relaxed wake model is beneficial. Free-vortex methods typically model the wake as a single trailing tip vortex of constant strength to reduce computational expense. Further details on this wake model, as well as potential improvements, are given by Govindarajan and Leishman [
19].
Barcelos et al. [
20] used a quasi-steady potential flow-based method first introduced by Bramesfeld and Maughmer [
21] to analyze quadrotor flight configurations. This method eliminates the trailing vortices present in conventional vortex lattice methods by replacing them with vortex sheets. As the analysis was quasi-steady, streamwise changes in shed circulation were not modeled in the wake, and impulse forces were not approximated.
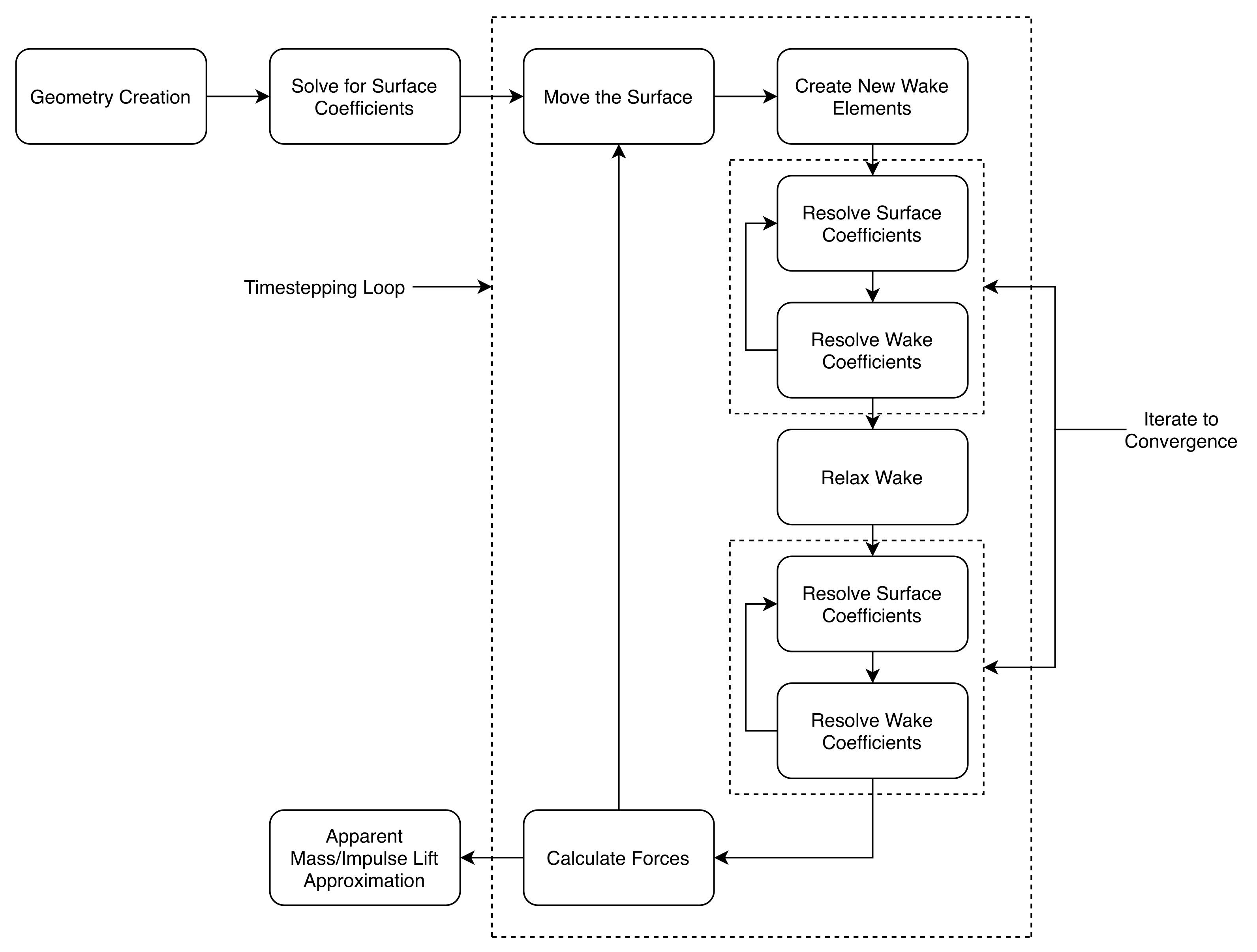
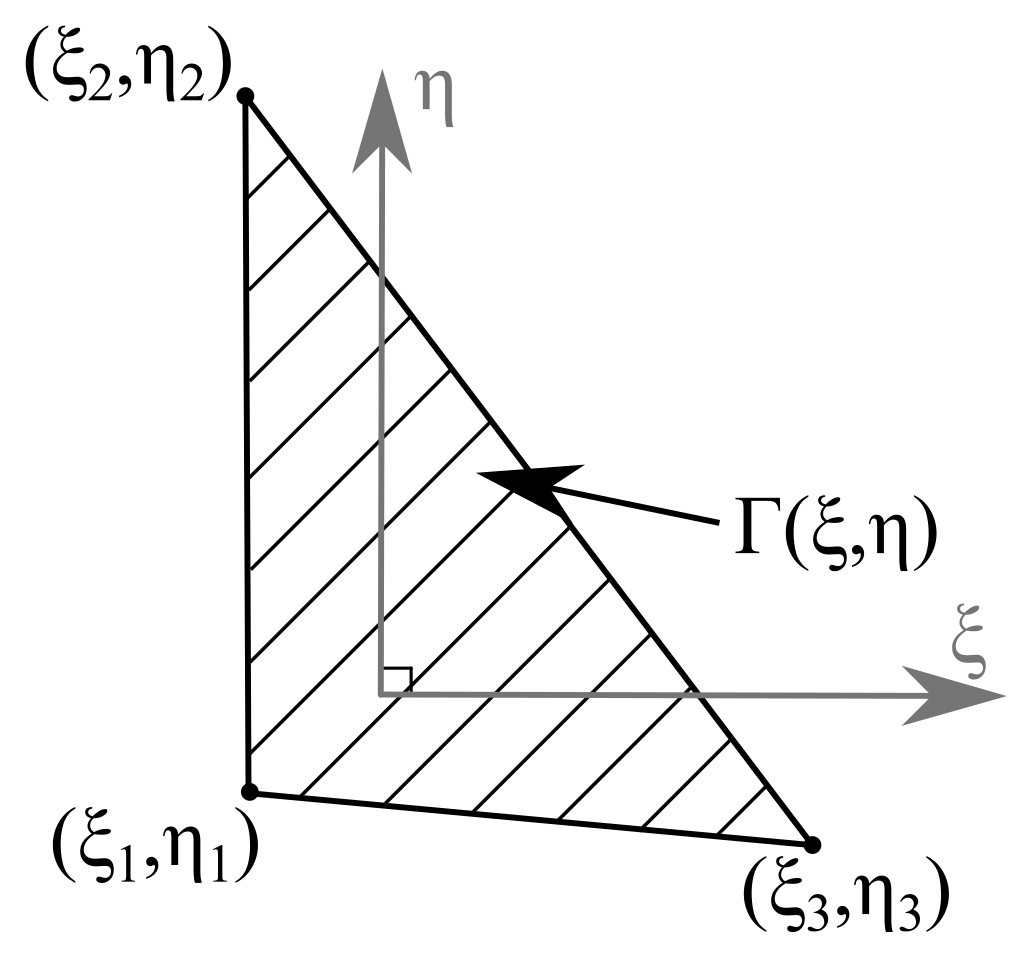
A new potential flow method is used in this study to predict unsteady rotor thrust. This method is referred to as the DDE method because it uses distributed doublet elements (DDEs) to model unsteady systems with complex wake interactions. The lifting surfaces and wakes are discretized and represented as a network of planar distributed doublet sheets with continuous higher-order strength distributions, resulting in a velocity field that is defined everywhere. This reduces the number of singularities in the system when compared to vortex filament-based methods, such as UVLMs, and leads to a robust unsteady relaxed wake model. In addition to this, the distributed nature of the element strength alleviates timestep-size constraints which exist for some UVLMs.
In this study, both experimentally-obtained data, as well as transient blade loads predicted by Misiorowski et al. [
5], are used to validate the DDE method for unsteady rotor analysis in forward flight. The DDE method is then used in turn to provide a detailed analysis of the transient thrust response of two different rotors in partial and fully edgewise flow. This approach was chosen because even though experimental testing is one approach to understanding how rotor thrust oscillates over time in edgewise or near-edgewise flow, most rotor-test stands are unable to distinguish the individual thrust contributions from each blade. Likewise, using flow visualization is infeasible for small-scale rotors at comparatively high rotational speeds. Through using computational modeling, such as the DDE method, it is possible to break down the rotor response into the response of the individual blades and their interactions with the rotor wakes and freestream.
3. Results
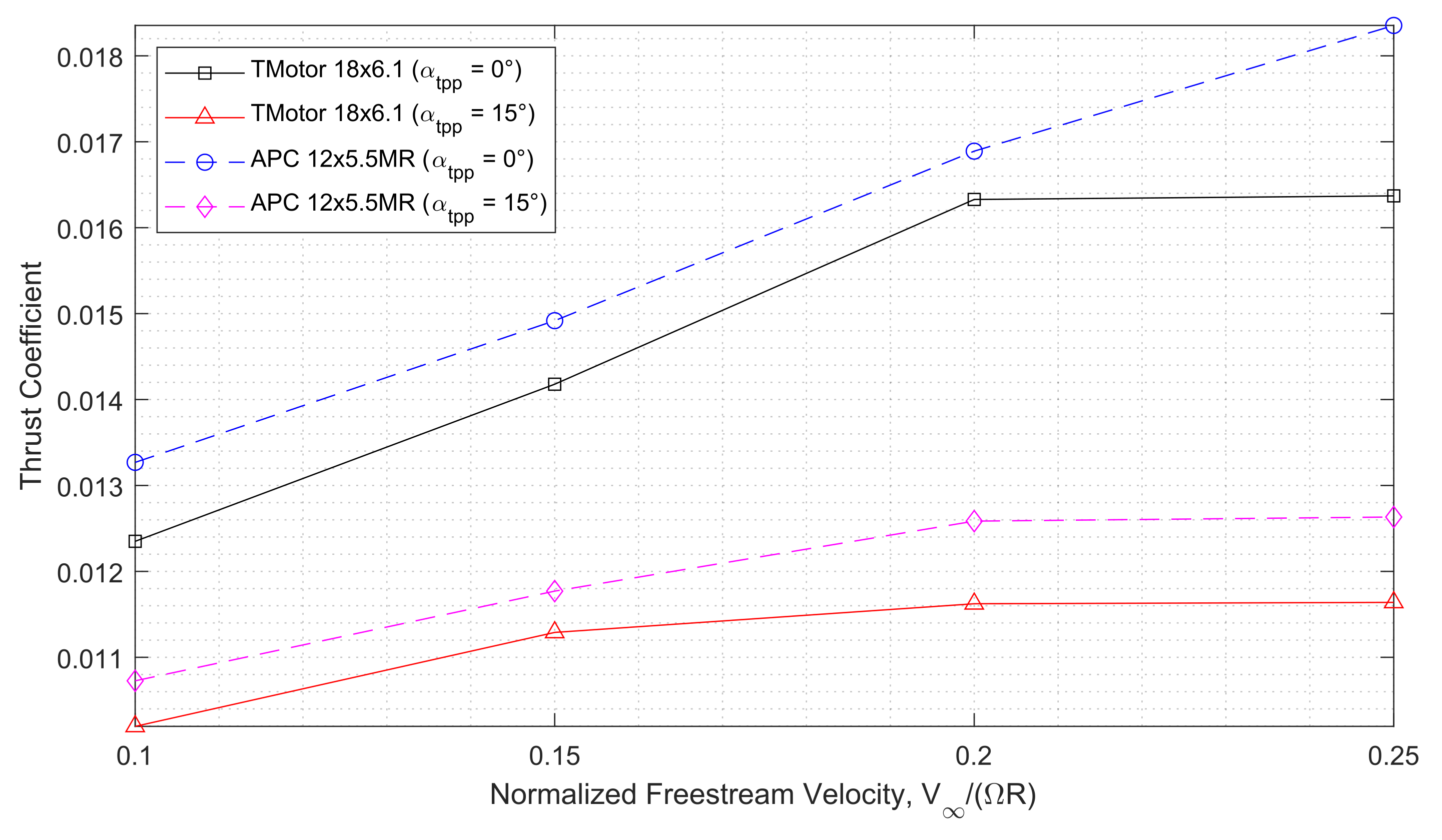
Using the DDE-based method, the T-MOTOR 18x6.1 and APC 12x5.5MR rotors were analyzed at various normalized freestream velocities at tip-path plane angles of
and
, resulting in four unique datasets. An overview of the time-averaged thrust coefficients plotted against normalized freestream velocity is given in
Figure 11. For both rotors, the rate of change of the thrust coefficient with normalized freestream velocity is higher at an angle of attack of
. For both angles of attack, the APC rotor has a higher predicted thrust coefficient than the T-MOTOR across the range of normalized freestream velocities.
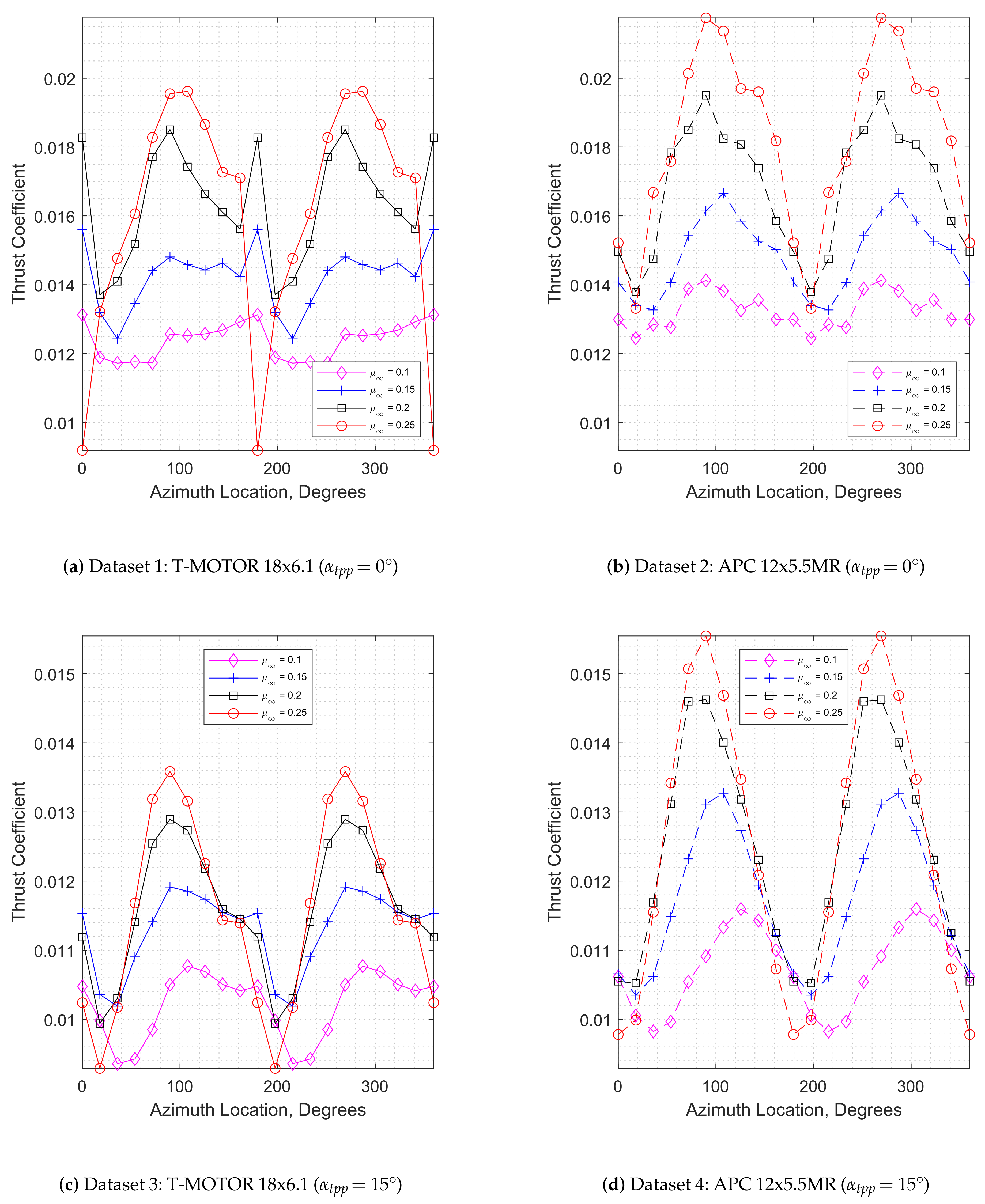
The thrust coefficients versus azimuth locations for each of these four datasets are plotted in
Figure 12. In most cases, the peak rotor thrust appears around
and
, which corresponds to a blade passing the region of maximum advancement. The onset of this peak is delayed as the normalized freestream velocity is decreased. For the APC rotor operating at
,
Figure 12b shows that the thrust coefficient for the
case is equivalent to or greater than that of the
case across the range of azimuth locations, which is not the case for the other datasets. This results in a higher time-averaged thrust coefficient for the APC rotor at
and
, as shown in
Figure 11.
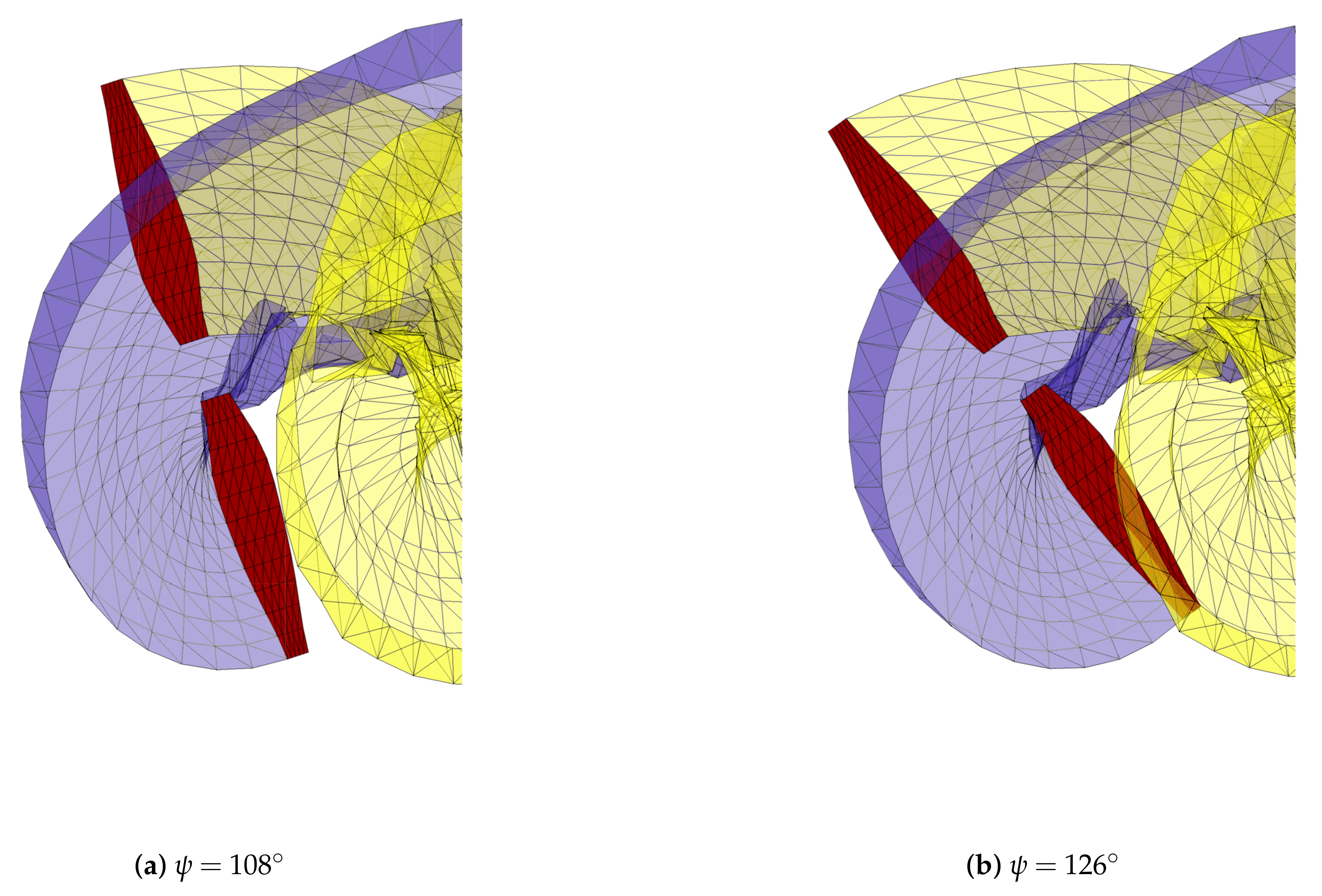
Most of the cases shown in
Figure 12, except for those shown in
Figure 12d, have small secondary peaks occurring roughly
after the primary peaks. To explain the cause of these peaks,
Figure 13 illustrates the APC rotor at two azimuth locations corresponding to a primary and secondary peak for the case of
in
Figure 12b.
Figure 13a is a top-down snapshot of the APC rotor during the primary peak at an azimuth location
. At this azimuth location, the shed vortex of a previously advancing blade is passing over the advancing blade. As this tip-vortex moves inboard along the blade, the upwash outside of this tip-vortex increases the effective angle of attack of the blade sections along the outboard portion of the rotor blade. Similarly, at this azimuth location, the retreating blade is outside of the tip-vortex of a previous blade pass, which increases the effective angle of attack of the blade sections along the retreating blade, which are experiencing low relative velocities. The rotor and wake geometry corresponding to the secondary peaks of the case of
in
Figure 12b are displayed in
Figure 13b. This figure represents an azimuth location of
. The main difference between
Figure 13a,b is that the retreating blade has entered into the tip-vortex of a previous blade pass, indicating that the primary and secondary peaks in the transient thrust for this case could be created by a negative effect acting on the retreating blade caused by this interaction. As the retreating blade enters further into the downwash region, the thrust output of the rotor collapses, leading to the negative thrust peak at
.
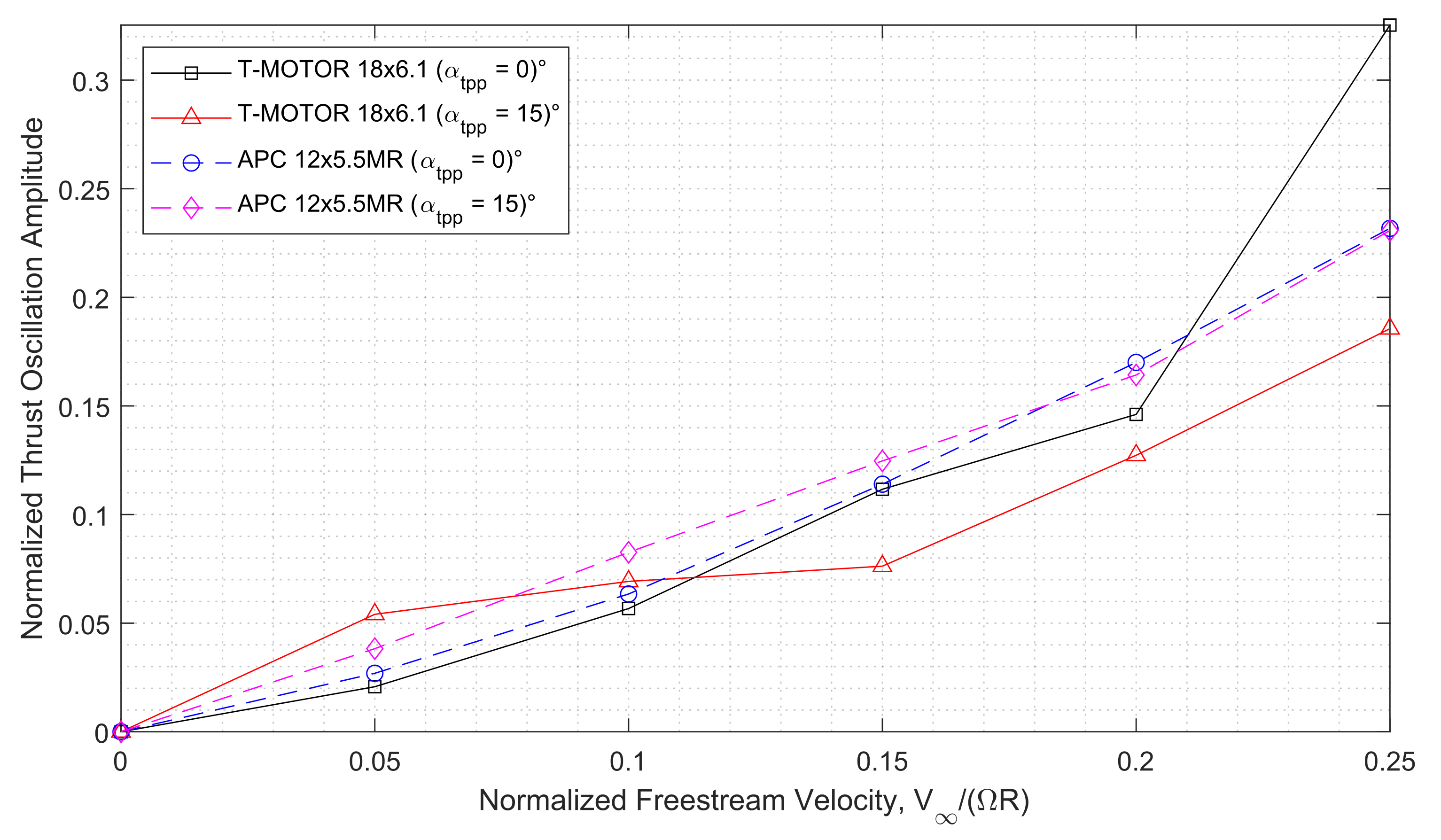
In order to identify further trends in the transient thrust data presented in
Figure 12, a normalized thrust coefficient is used:
where
represents the mean thrust coefficient as shown in
Figure 11. The amplitude of oscillation of this normalized thrust is then:
Figure 14 shows this normalized thrust oscillation amplitude
plotted against the normalized freestream velocity of Equation (
3) for all four datasets. As expected, the normalized thrust oscillation amplitude increases with the normalized freestream velocity, as advancing and retreating blade effects become more severe. In the extreme, such as the cases at a normalized freestream velocity of
, the normalized thrust oscillation amplitude of the rotors is in the range of 20–30% of the mean rotor thrust output, indicating the rotor thrust output varies by
–
per revolution. The rotor blade design appears to impact the relationship between the normalized thrust oscillation amplitude and the normalized freestream velocity, as evidenced by the differences between the T-MOTOR and APC results, which become more pronounced with an increasing normalized freestream velocity. Observing these four datasets, there does not appear to be a discernible link between the normalized thrust oscillation amplitude and the tip-path plane angles of
and
, though the normalized thrust oscillation amplitude will be zero for all normalized freestream velocities at the tip-path plane angle
.
Understanding the magnitude of oscillations in the thrust of a rigid rotor provides added context for the rotor designer. The total thrust oscillation amplitude of the rotor in
Figure 14 only represents the force oscillations of both blades together and does not represent the thrust oscillation amplitude of a single blade. To begin quantifying the individual blade contributions to the thrust coefficient, two distinct operating conditions were chosen for closer analysis.
Figure 15 shows the normalized thrust coefficients of the rotors plotted against azimuth location, including individual blade contributions, for tip-path plane angles of
and
and normalized freestream velocities of
and
, respectively. The thrust coefficients were normalized using Equation (
7) to allow a direct comparison.
The individual blade contributions for the two fully-edgewise cases in
Figure 15a,b vary by approximately
over a revolution. In both cases, the peak thrust output of the rotor aligns with the peak thrust output of the advancing blade, which occurs at azimuth locations of approximately
for Blade A and
for Blade B, for both the T-MOTOR and APC rotors under this operating condition.
Figure 15a also shows that the retreating blade of the T-MOTOR rotor is predicted to have its thrust collapse rapidly as the blade passes through the downstream region, likely due to blade–vortex interactions. This contributes to the large overall variation in the normalized thrust oscillation amplitude for this specific rotor and operating condition, as shown in
Figure 14. The partially-edgewise cases in
Figure 15c,d both have normalized blade thrust contributions varying by approximately
. Under this specific operating condition, the thrust output of the retreating blade of the T-MOTOR rotor begins to recover faster than the advantage of the advancing blade is lost, leading to a slight double peak in the total thrust output of the rotor.
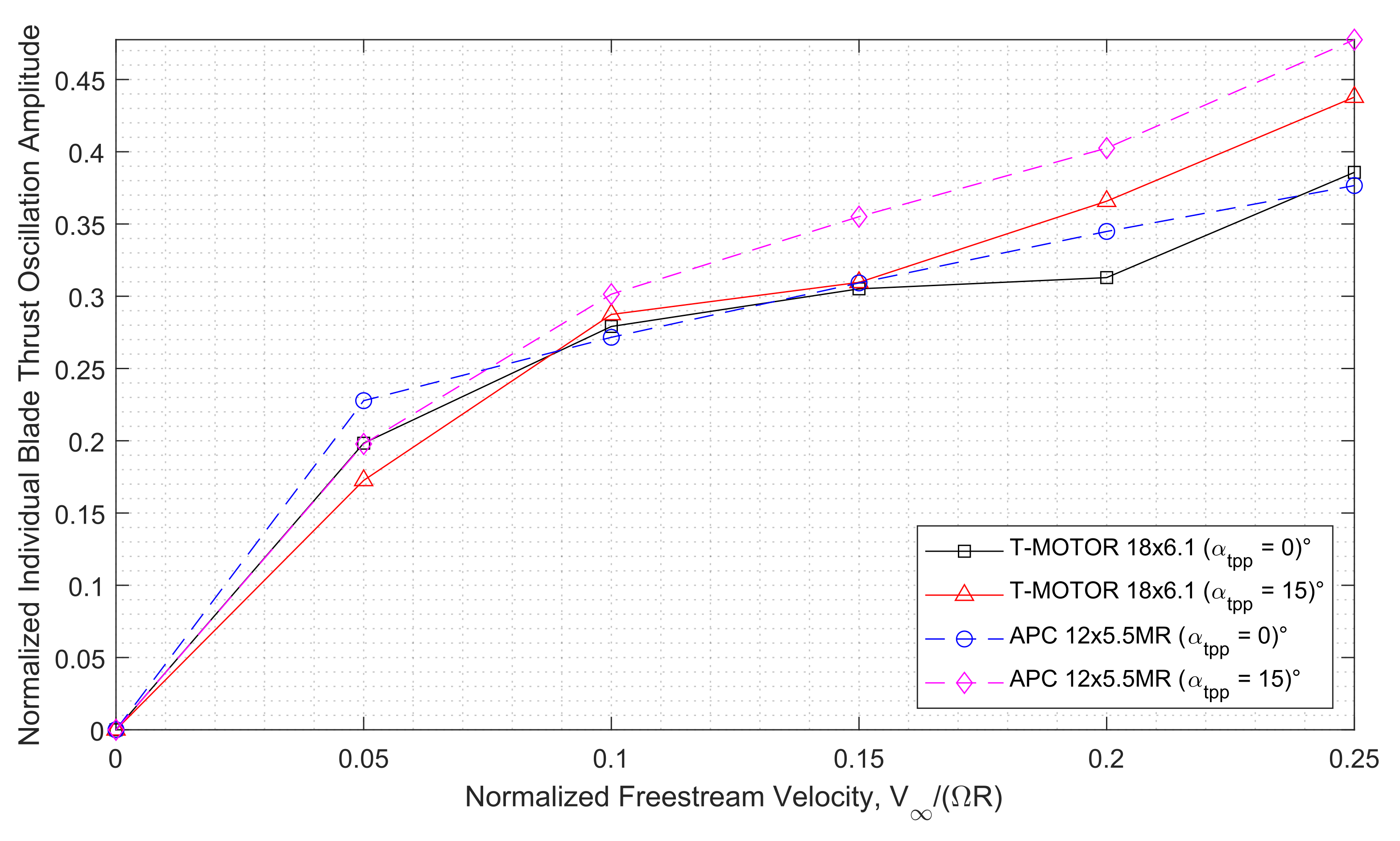
In order to generalize the results shown in
Figure 15, normalized individual blade thrust oscillation amplitudes were found for all datasets. These results are shown in
Figure 16. Even at low normalized freestream velocities, the oscillation amplitudes for a single rotor blade are approximately
, with a total variation in thrust output of 40% of the mean rotor thrust. This oscillation amplitude increases to approximately
as the normalized freestream velocity increases, indicating that the thrust output of a single rotor blade may approach the mean thrust output of the entire rotor over one revolution under these conditions. Analysis of this nature should prove useful when considering aeroelastic, aeroacoustic, and structural properties during the design phase of rigid rotors.
The relationship between the normalized individual blade thrust oscillation amplitude and the normalized freestream velocity does not appear to be linear. In addition, as with the total normalized thrust oscillation amplitude shown in
Figure 14, there does not appear to be a discernible pattern between the two tip-path plane angles for each rotor. The exceptions to this are the
cases at high normalized freestream velocities, where the normalized individual blade thrust oscillation amplitude exceeds those of the fully-edgewise cases. This is likely due to how the mean rotor thrust changes with the normalized freestream velocity.
Figure 11 shows that as the normalized freestream velocity increases, the thrust output of the rotors at
increases at a greater rate than at
. However, advancing and retreating blade effects become more severe as the normalized freestream velocity increases, which leads to higher normalized individual blade thrust oscillation amplitudes for
, as the mean thrust output of the rotor does not change significantly. Coupled with the fact that these oscillation values should approach zero as the tip-path plane angle of attack approaches
, it is likely that
represents the tip-path plane angle of attack region that results in the highest normalized individual blade thrust oscillation amplitudes for these two rotors.
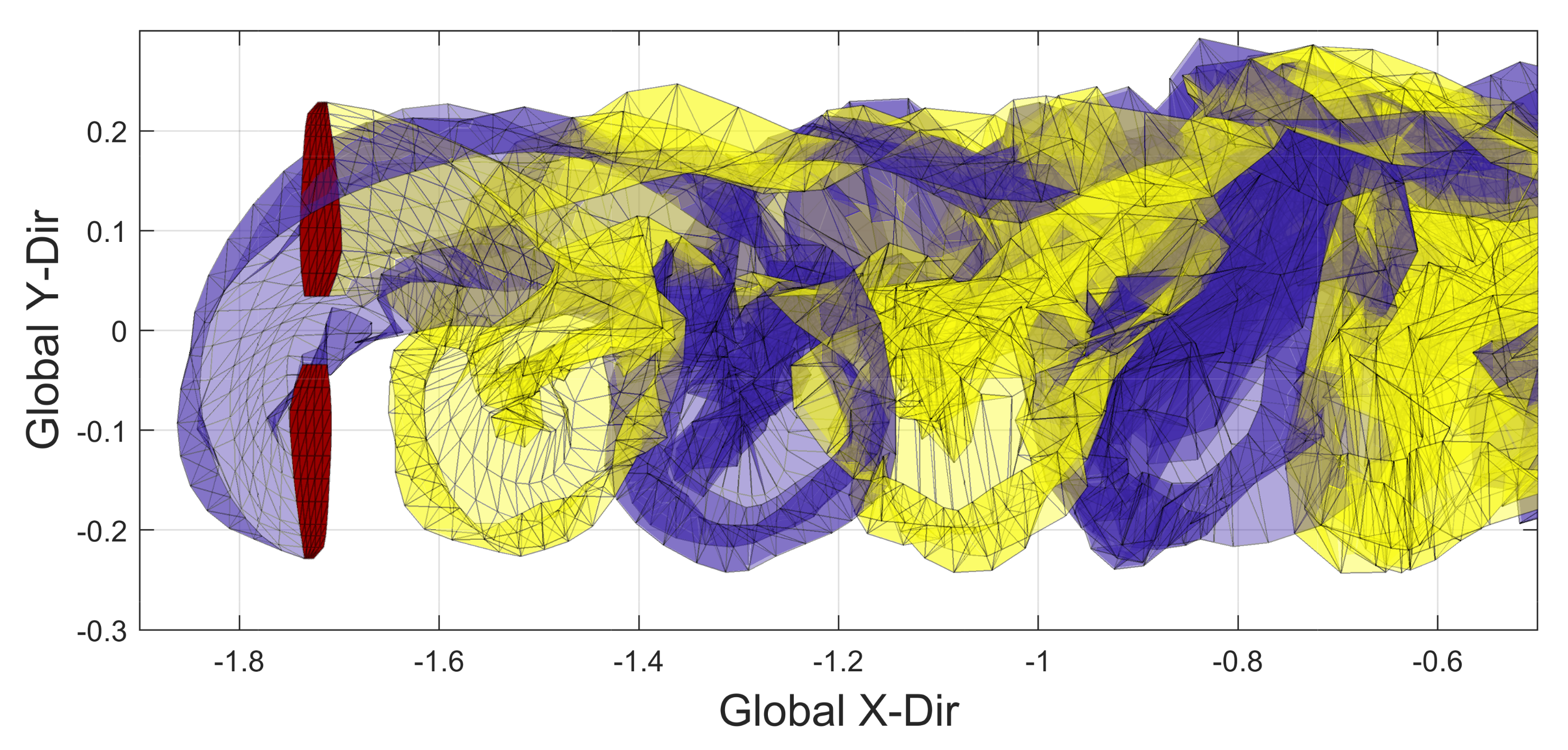
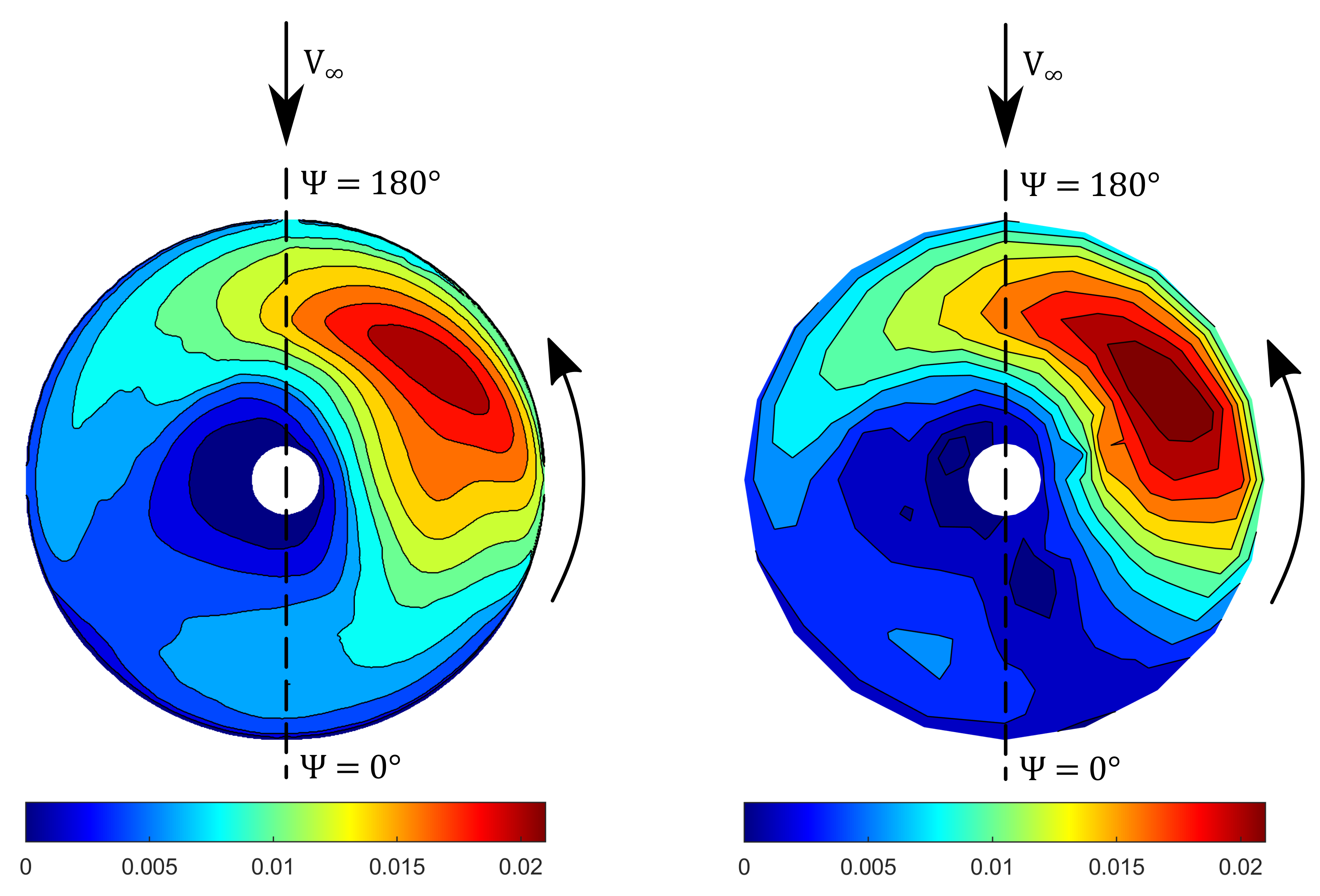
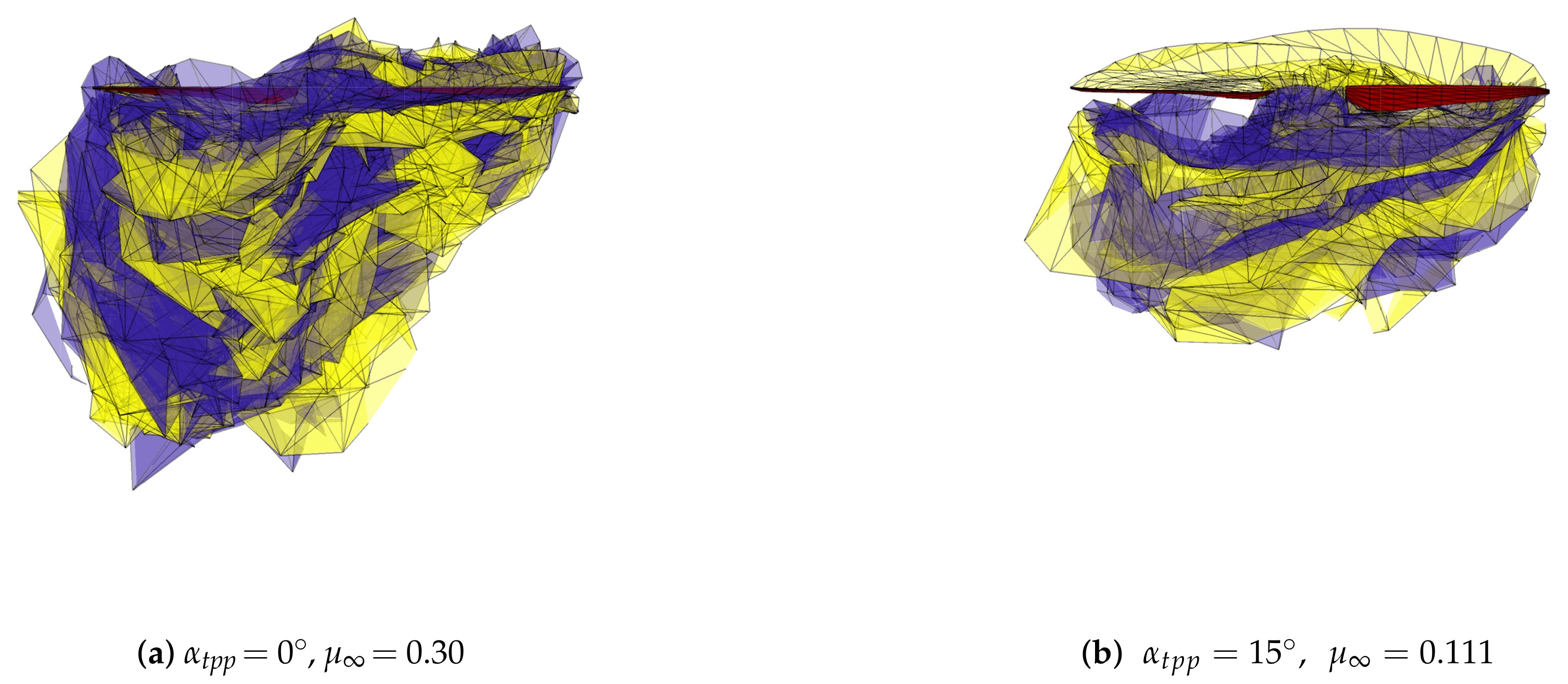
Another important takeaway from this analysis is an apparent asymmetry in the wake structure behind a rigid rotor in forward flight, which was noted by Misiorowski et al. [
5].
Figure 17 provides frontal views of two T-MOTOR 18x6.1 cases, with
Figure 17a representing the rotor in fully-edgewise flow at a high normalized freestream velocity and
Figure 17b representing the rotor at a tip-path plane angle of
at a more modest normalized freestream velocity. Due to the higher blade thrust oscillation amplitude present in the fully-edgewise case, the wake structure is highly asymmetric, with a large increase in downwash behind the advancing blade where the individual blade thrust output is the highest. The wake of the rotor in
Figure 17b, however, is more uniform, but still exhibits some degree of asymmetry. This asymmetric wake structure is in conflict with Glauert’s assumption that a rotor in high-speed forward flight has an induced downwash similar to that of a circular wing, as discussed by Leishman [
31], implying that this assumption is not necessarily valid for rigid rotors. Knowing the wake structure behind a rigid rotor in forward flight may be of use to multicopter designers when considering rotor–wake interactions, such as determining the optimal rotation directions of the rotors or the best orientation of the vehicle for forward flight. Research of this nature has been conducted by Barcelos et al. [
33] and Misiorowski et al. [
5].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















