1. Introduction
Modern civil transport aircraft, usually adopting supercritical wings for delaying the transonic drag rise, are strongly impacted by the appearance of the normal shock waves on the wing surfaces at both the cruise and buffet conditions [
1]. The phenomenon of transonic shock buffet occurs when the shock waves induce boundary layers separation, resulting in a self-sustained periodic shock motion leading to large lift fluctuations [
2]. For modern aircraft flying at high subsonic Mach numbers or high angles of attack, periodic shock oscillations with large amplitudes are observed on the wing surfaces [
3]. The resulting oscillating loads on aircraft may cause structure fatigue and flight accidents, which severely limit the flight envelopes of aircraft [
4]. Therefore, the research on transonic buffet is of practical significance for improving the aerodynamic performances and safety of civil transport aircraft.
The buffet phenomenon can be explained by a self-sustained feedback model originally proposed by Lee [
5]. The model shows that the self-sustained shock oscillation is due to a feedback loop between the shock and the acoustic waves. Lee’s model was supported by a large number of experimental and numerical studies [
3,
6,
7,
8], which explained periodic shock motion properly. It is well known that transonic buffet involves complex shockwave/boundary-layer interactions that pose significant challenges to numerical simulations. The most promising approaches are the high-fidelity Reynolds stress turbulence models and eddy-resolved turbulence models, such as detached-eddy simulations [
7,
8]. However, such techniques are currently not practical for studying a large parameter space due to their extremely high computational cost. A number of studies have been dedicated to assessing the efficiency and accuracy of various unsteady Reynolds-averaged Navier–Stokes (URANS) methods in capturing shock buffet [
9,
10]. In their studies, the numerical schemes [
11], turbulence models [
11,
12,
13,
14,
15], time-step sizes [
16], and grids [
10,
16,
17] have all been shown to be crucial in predicting shock oscillation. Recently, Giannelis et al. [
18,
19] also carried out the relevant transonic buffet simulations using the URANS method based on Menter’s
k-
ω SST turbulence model [
20] and obtained a good prediction in buffet frequency and shock oscillation amplitude.
From the perspective of aircraft design, it is highly desirable to suppress the shock buffet in order to extend the flight envelope. Various buffet control methods have been proposed. The active control methods such as the trailing-edge deflector [
21,
22], trailing-edge flap [
23], and fluidic vortex generator [
24] were found to be able to provide the most effective buffet control over a wide range of flow conditions. In particular, the approach aimed to reduce the shock oscillation by changing the trailing-edge shear layer directly, such as the trailing-edge deflector (TED) or trailing-edge flap, was thought to have great potential in practice. Caruana et al. [
21,
22] developed a closed-loop control system based on a trailing edge deflector to suppress the transonic buffet. Their study showed that the control effectiveness reached its maximum value when the TED oscillation frequency was close to the buffet frequency. Later, Gao et al. [
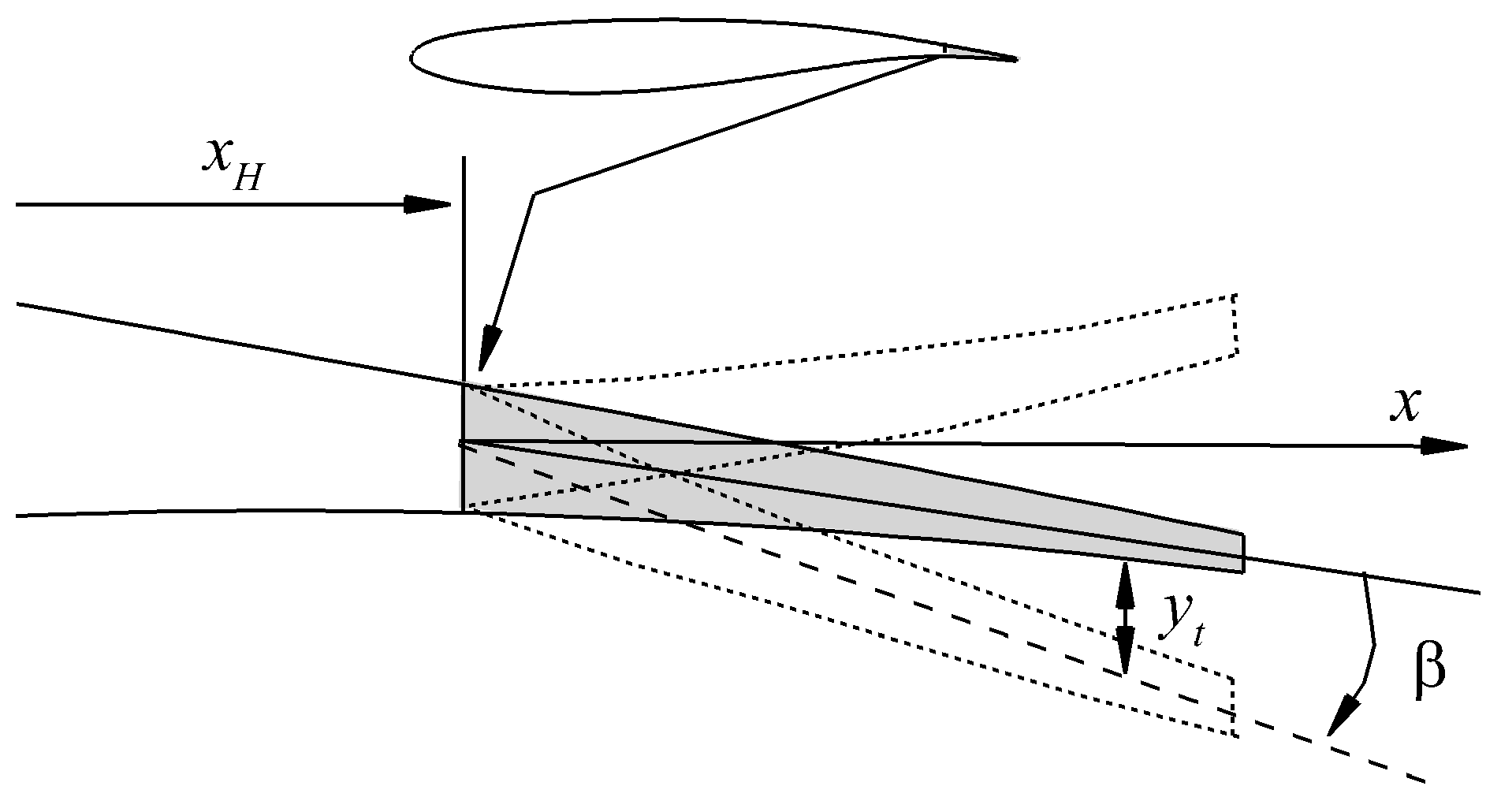
23] investigated the effect of trailing-edge flaps on transonic buffet. They proved that under various buffet conditions, a closed-loop law for actuation was an effective technique for buffet suppression. Recently, the effect of an upper trailing-edge flap (UTEF) on buffet alleviation was investigated by Tian et al. [
25]. They found that the buffet was successfully delayed to a higher angle of attack due to the suppression of flow separation downstream of the shock wave.
The passive methods for buffet control, such as the streamwise slots [
26,
27], the shock control bumps (SCBs) [
28,
29], and the vortex generators [
30,
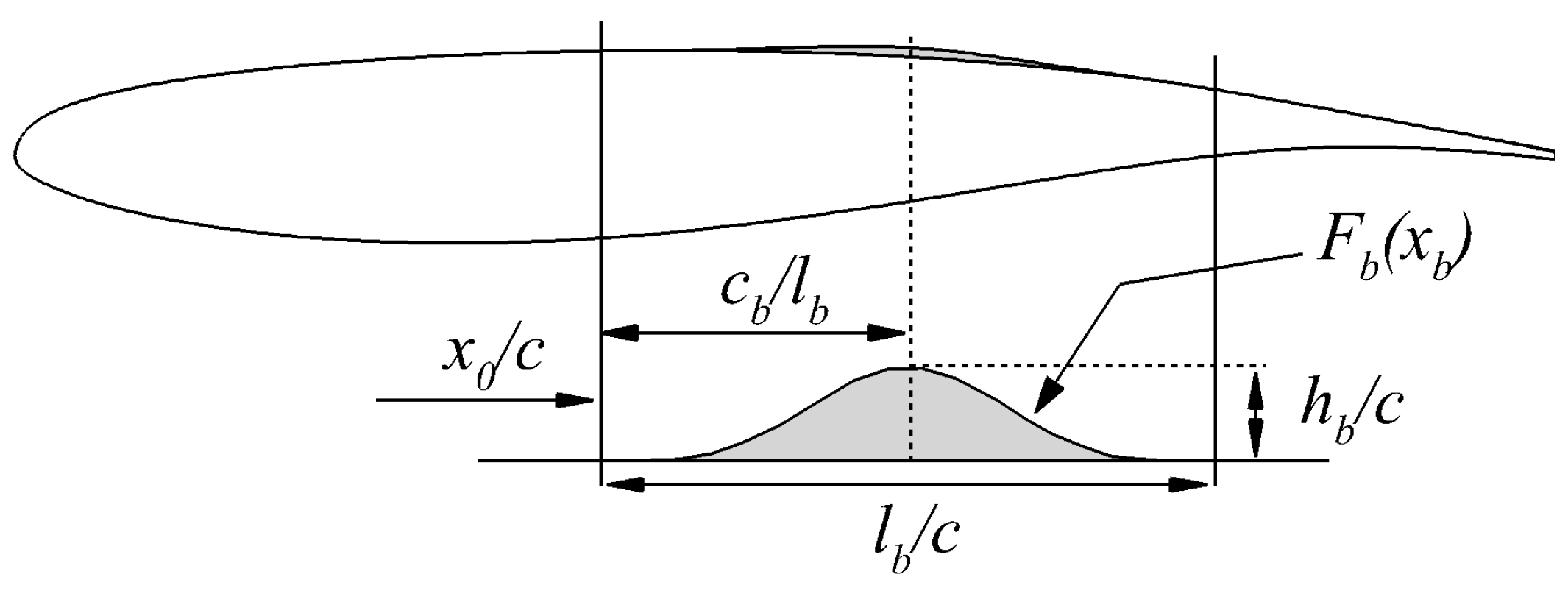
31], were also pursued due to their simplicity in comparison with the active methods. Among them, the SCBs are particularly attractive for their ability to reduce wave drag at cruise speeds. The SCBs are originally designed to reduce the strength of the normal shock waves on the wing surfaces. In early studies [
32], the application of two-dimensional SCBs was found to reduce the transonic wave drag without a significant viscous drag penalty. This was accomplished by a split of the normal shock into a λ-shock structure; thus, the total pressure losses could be reduced. The potential of 2D shock control bumps has been investigated by a number of computational and experimental investigations [
33,
34,
35]. According to these studies, a local contour bump is the most effective shock control method for drag reduction. The drawbacks of 2D bumps were confirmed in their studies with poor off-design performance. Since then, 3D shock control bumps have been introduced and examined by Qin et al. [
36]. The 3D bumps were proved to have the same level of drag reduction as that of 2D bumps and have more robustness in some cases.
Later, Birkemeyer et al. [
33] concluded that the shock control bumps positioned significantly downstream of the shock wave could reduce the pressure fluctuations close to the trailing edge, thus delaying the shockwave–boundary layer interaction. Mayer et al. [
29] compared and assessed two different types of contour bumps for delaying buffet onset. The results showed that in addition to delaying the buffet onset by increasing the maximum lift coefficient, 2D bumps were also capable of damping the buffet-related lift oscillations inside the buffet regime by an efficient shock strength reduction in combination with the positive effects on flow separations. Tian et al. [
37] found that the downstream SCB could reduce the adverse pressure gradient and the separation bubble downstream, resulting in better buffet performance for a wide range of flight conditions. Geoghegan et al. [
38] performed a parametric study on the contour bump for buffet control and found that the SCB location suitable for drag reduction often conflicted with that for buffet suppression. As pointed out by Mayer et al. [
39], a robust design is required to improve the overall performance of an airfoil over a wide range of angles of attack.
As mentioned above, although active control methods have the potential of completely suppressing the shock buffet, the issues related to their robustness still need to be further addressed in order to make them more useful for practical applications. On the other hand, passive shock control bumps provide a cheaper way to suppress the buffet, whereas bump designs have to balance their drag-reduction capability. This motivated the present study to explore the possibility of enhancing the robustness of an active buffet control system using the trailing-edge flap by coupling the passive shock control bumps for drag reduction. It is believed that this integrated control system can achieve a more robust buffet control without degrading the SCB performance for drag reduction.
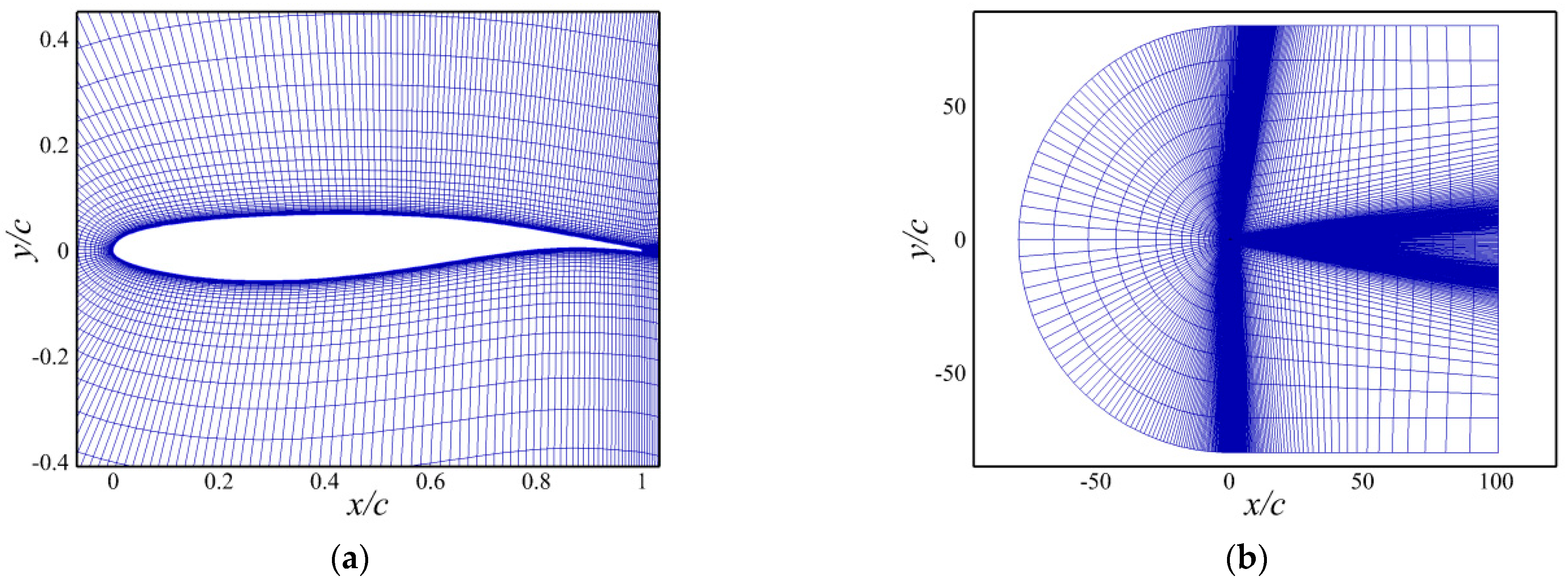
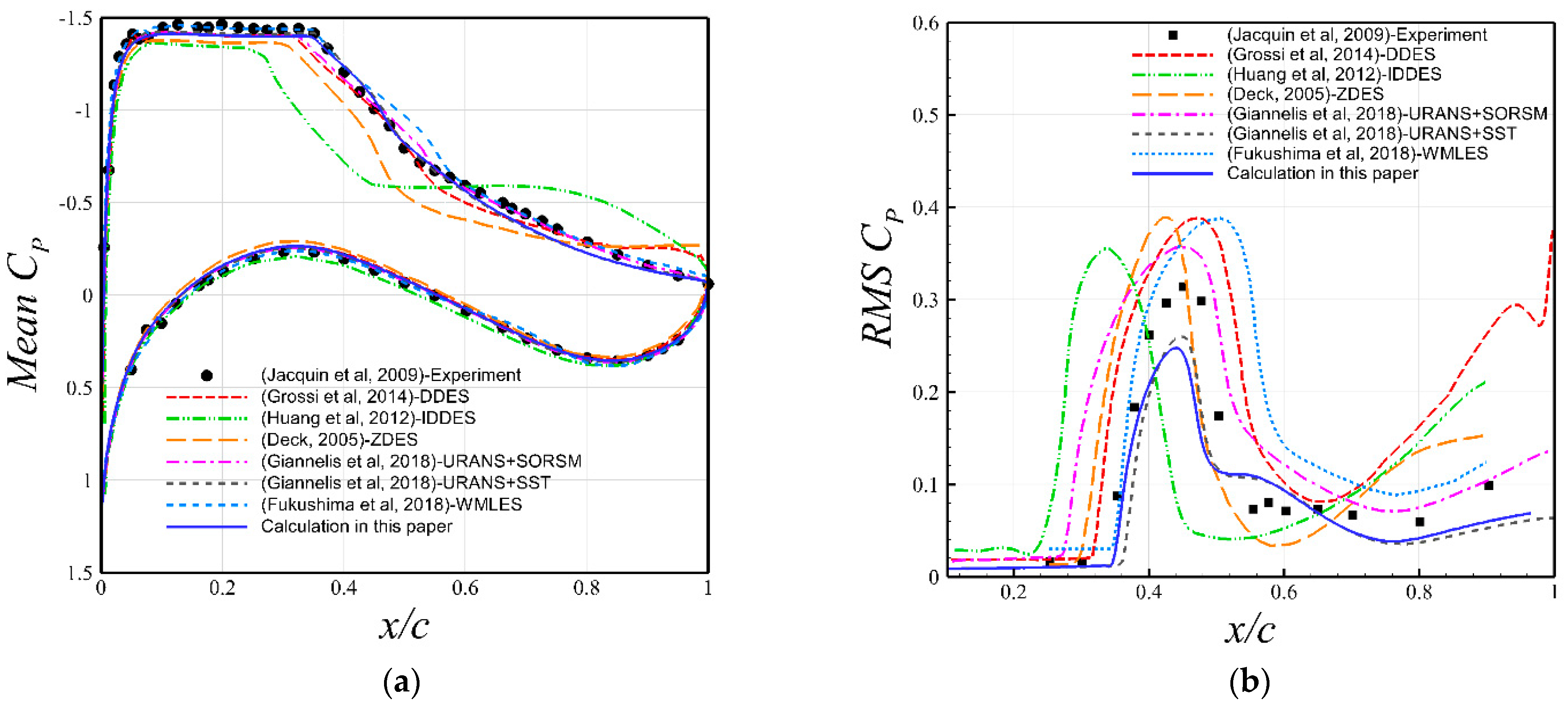
The paper is organized as follows. First, the numerical method for the airfoil buffet simulations is described and validated with the experimental data on a supercritical airfoil under an experimentally observed buffet flow condition. Then, the closed-loop buffet control based on the feedback of the lift coefficient is investigated, with a discussion on the effect of the control parameters on the buffet control. After that, two SCBs are designed for drag reduction at given design points. Finally, these two bumps are integrated into the active buffet control system, and the performances of the integrated control systems are discussed.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}