1. Introduction
Due to the characteristics of microgravity, high vacuum, and strong radiation in space, astronauts carrying out space missions will face extremely high risks. Space robots, with their outstanding advantages in terms of strong adaptability to the space environment and freedom from physiological conditions, have gradually become the main force in space exploration [
1,
2,
3]. In recent years, with the continuous development of space exploration, capturing non-cooperative targets has attracted much attention, as the technique is expected to be applied for functions such as the removal of debris from orbit and servicing broken satellites for repair [
4,
5,
6].
Scholars have conducted research on related technologies in the capture of non-cooperative targets. It is generally known that an entire capture task contains three phases: the target-chasing control phase, which is also called the pre-contact phase; the contact phase between the target and end-effector of the space robot; and the stabilization control phase of tumbling motion, which is also called the post-contact phase [
7,
8]. Most research focuses on the pre-contact phase to optimize the capture configuration or follow an optimal trajectory [
9,
10,
11,
12], and the post-contact phase to detumble the non-cooperative target or reduce the base attitude disturbance [
13,
14,
15,
16]. In this paper, based on the analysis of the contact phase, which emphasizes contact modelling, the capture configuration is optimized to minimize the maximum contact force.
For the contact-modelling problem, there are generally two different approaches from the perspective of whether the contact process is assumed to be continuous or not. The first approach is usually called discrete contact dynamics modelling method, which assumes that the contact is an instantaneous phenomenon, and that the configuration of contacting bodies does not change significantly. Therefore, the contact effect in this approach is usually regarded as a contact–impact impulse. Most of the early studies on the contact problem between space robots and targets are based on the first approach, and the minimization of the contact-impact impulse becomes one concern to reduce the effect caused by contact [
17,
18,
19,
20,
21,
22]. It is simple and efficient to make a contact dynamics analysis of a space robot by the first approach, but only the contact–impact impulse can be calculated and no more detailed information during the contact process can be obtained. The second approach is usually called the continuous contact dynamics modelling method, which is based on the fact that the interaction forces act in a continuous manner during the contact. Some contact force models are proposed based on the second approach, for example, the Hunt–Crossley, Herbert–McWhannell, Lankarain–Nikravesh, Zhiying–Qishao and Lee–Wang models [
23,
24,
25]. Several of these models have been used to analyze the contact process between a space robot and a target [
26,
27,
28,
29]. The analytical expression of contact force can be obtained by this approach and thus the detailed information during the contact process can also be described. However, it may not be very efficient to directly apply these models to a space robot system, because it requires all of the motion equations integrated over the entire contact period. Refer to the concept of virtual mass proposed in [
30]; an effective mass concept is proposed for the contact modelling of space robots performing contact tasks [
31,
32], and this method is further extended to solve the contact problem of flexible space robots [
33]. Computational efficiency can be improved by this method, and an analytical solution of the contact information is given, but it is based on the assumption that only a central collision occurs.
As the contact–impact impulse is the integration of contact force over the entire contact period, the minimization of the contact–impact impulse is not equivalent to the minimization of the maximum contact force. If the maximum contact force exceeds the physical limit the space robot allows, the robot itself or the target may be severely damaged. Therefore, the maximum contact force should command attention and, actually, it is one of the most important indicators for contact problems [
34]. This paper is focused on continuous contact modelling and configuration optimization to reduce the maximum contact force for free-floating space robot capturing tumbling target. The main contributions of this paper are: (1) A novel concept of integrated effective mass that integrates the inertial properties of the contact bodies is proposed in an attempt to transform the complex contact process into the energy change of a virtual single body with integrated effective mass; (2) A more general continuous contact model is established, which is also suitable for non-central collisions between a space robot and a tumbling target; (3) The maximum contact force is derived as an important indicator for the null-space optimization method to reduce the maximum contact force. It is worth noting that the concept of integrated effective mass and the continuous contact model proposed in this paper are common to both redundant robots and non-redundant robots. However, due to the use of the null-space optimization algorithm, the optimization part is only applicable to redundant robots. If there is a need to optimize the maximum contact force for a non-redundant robot, the task constraints can be reduced or other optimization methods, such as the Particle Swarm Optimization (PSO), can be used.
The rest of this paper is organized as follows. The analytical expression of integrated effective mass is derived in
Section 2. On this basis, the continuous contact model between a free-floating space robot and a tumbling target is given in
Section 3, in which the maximum contact force expression is also derived. Thereafter, in
Section 4, the configuration optimization based on the null-space method is conducted for capturing a tumbling target, and the effectiveness of the proposed method is verified by numerical simulations in
Section 5. Finally, conclusions are drawn in
Section 6.
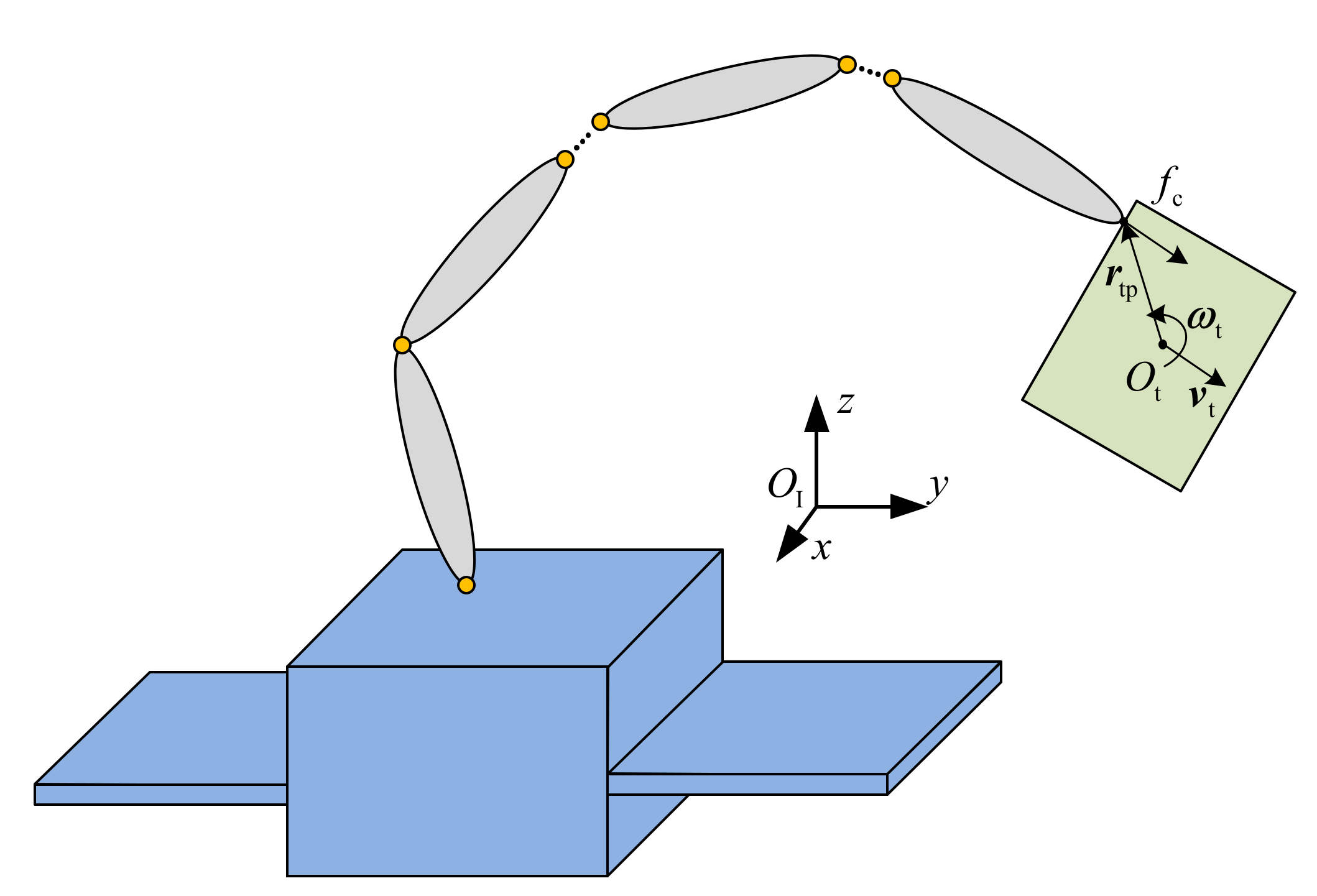
3. Continuous Contact Model between Space Robot and Tumbling Target
The contact between space robot and tumbling target is a complex process, and thus the following contact model is established under the assumptions of single-point contact and no friction. The classical model of contact force is shown in Equation (15), which incorporates a spring and damper in parallel, connecting the contact points:
where
K is the stiffness parameter,
represent deformation and deformation velocity;
is the nonlinear power exponent, which is considered to be 1.5 in most cases, and
is called the hysteresis damping factor with several classical expressions shown in
Table 1 [
23,
24,
25].
For the principle of model selection, the reader is referred to [
31], and
are calculated by the position and velocity information of the contact point. By directly substituting Equation (15) into Equations (3) and (5), the entire contact process can be obtained after several iterations, as shown in
Figure 2. This method may not be very efficient because it requires all of the motion equations to be integrated over the entire period of contact.
An integrated effective mass based continuous contact model is established in the following. From Equation (15), it can be obtained that:
where
represents deformation acceleration.
Integrate Equation (16) from the initial contact state to any state in the contact process.
where
is the initial relative velocity along the normal direction at the contact point.
Through mathematical manipulation, the expression of deformation can be obtained:
Substituting
into Equation (19), the maximum deformation can be expressed as:
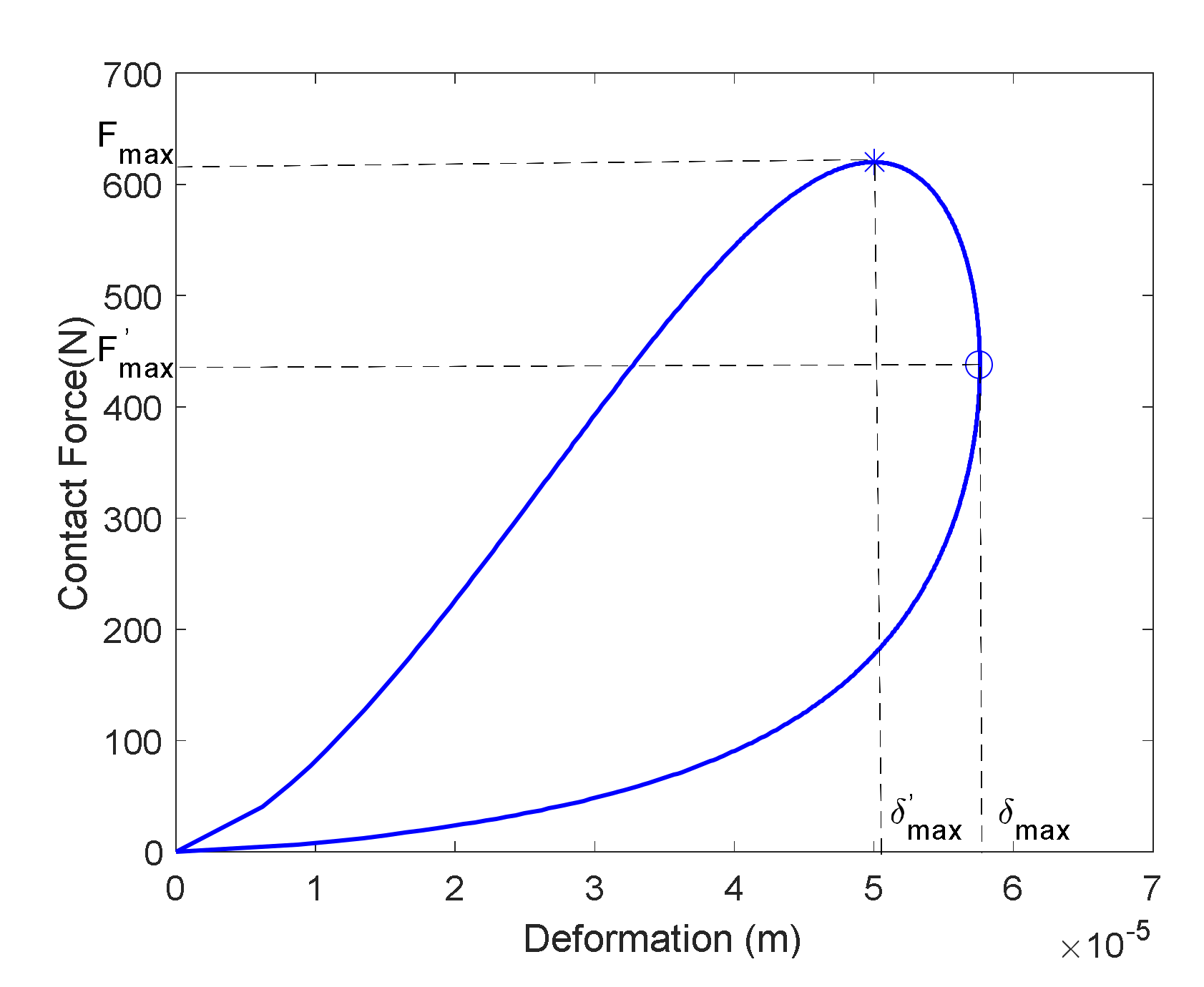
However, different from the basic Hertz model, in which the maximum contact force occurs at the maximum deformation, the calculation of the maximum contact force of the Hertz damping model is more complex.
Figure 3 shows the curve of the contact force with respect to deformation, where
and the Gonthier et al., model of the hysteresis damping factor is adopted. The marker “
” represents the maximum-contact-force point with coordinates (
,
), and the marker “o” represents the maximum-deformation point with coordinates (
,
). It can be seen that the maximum-contact-force and maximum-deformation points are not consistent.
The relative force error between
and
is defined as follows:
It can be seen from
Table 1 that the hysteresis damping factors all have the following form:
where
is a general expression with variable
.
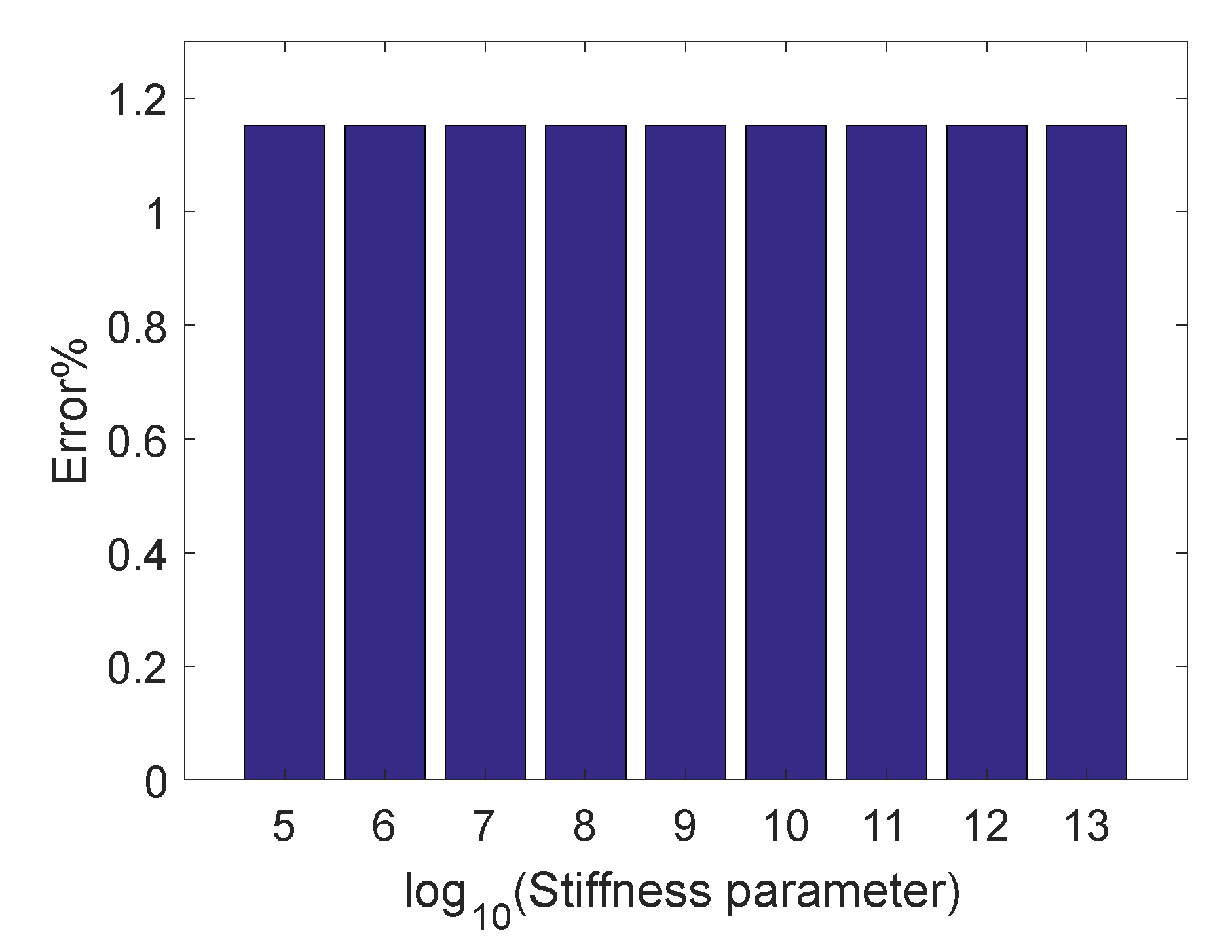
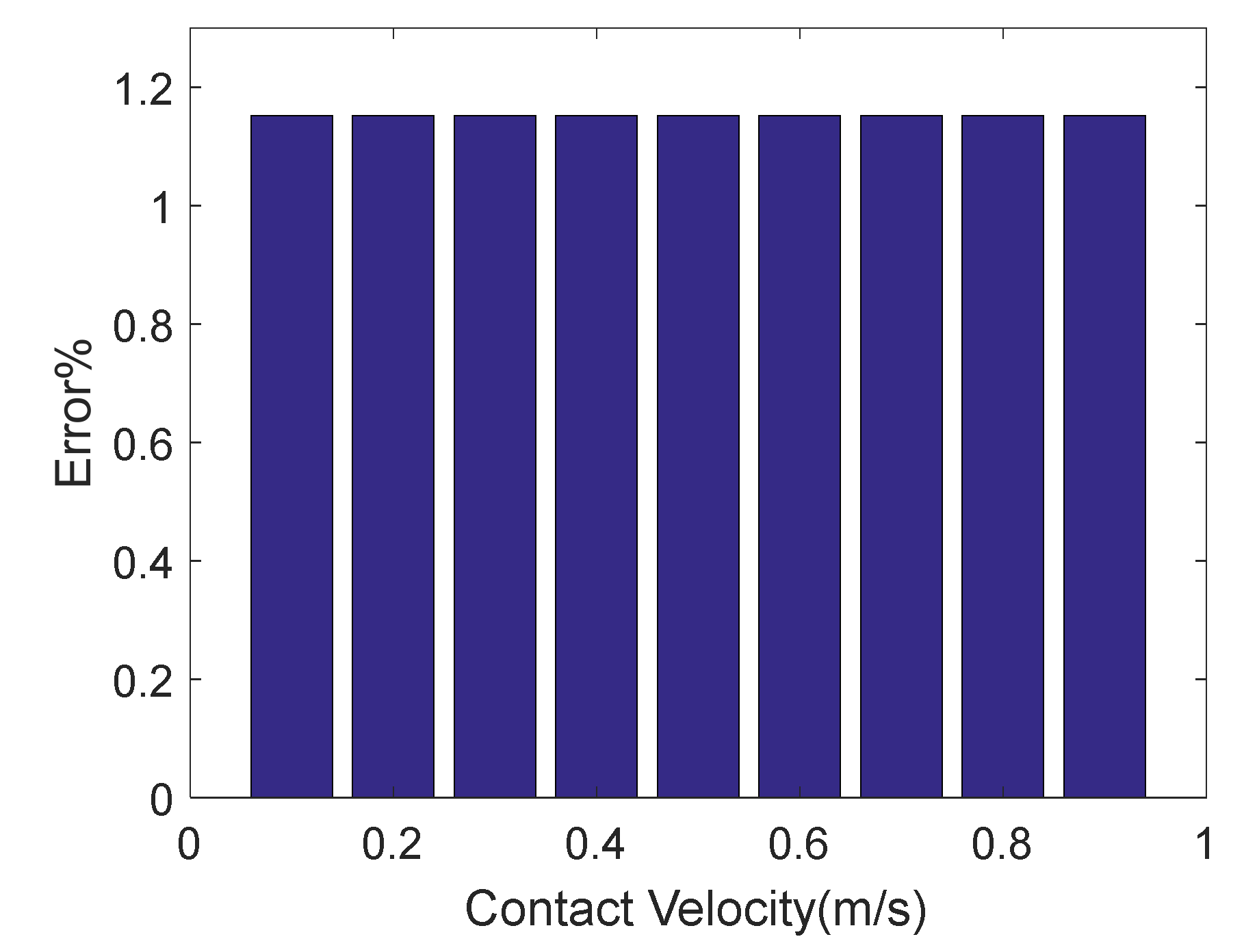
Therefore, assuming that both the kinematics parameters and dynamics parameters of the space robot and target are determined,
is only related to the contact stiffness parameter
, restitution coefficient
, and initial relative contact velocity
.
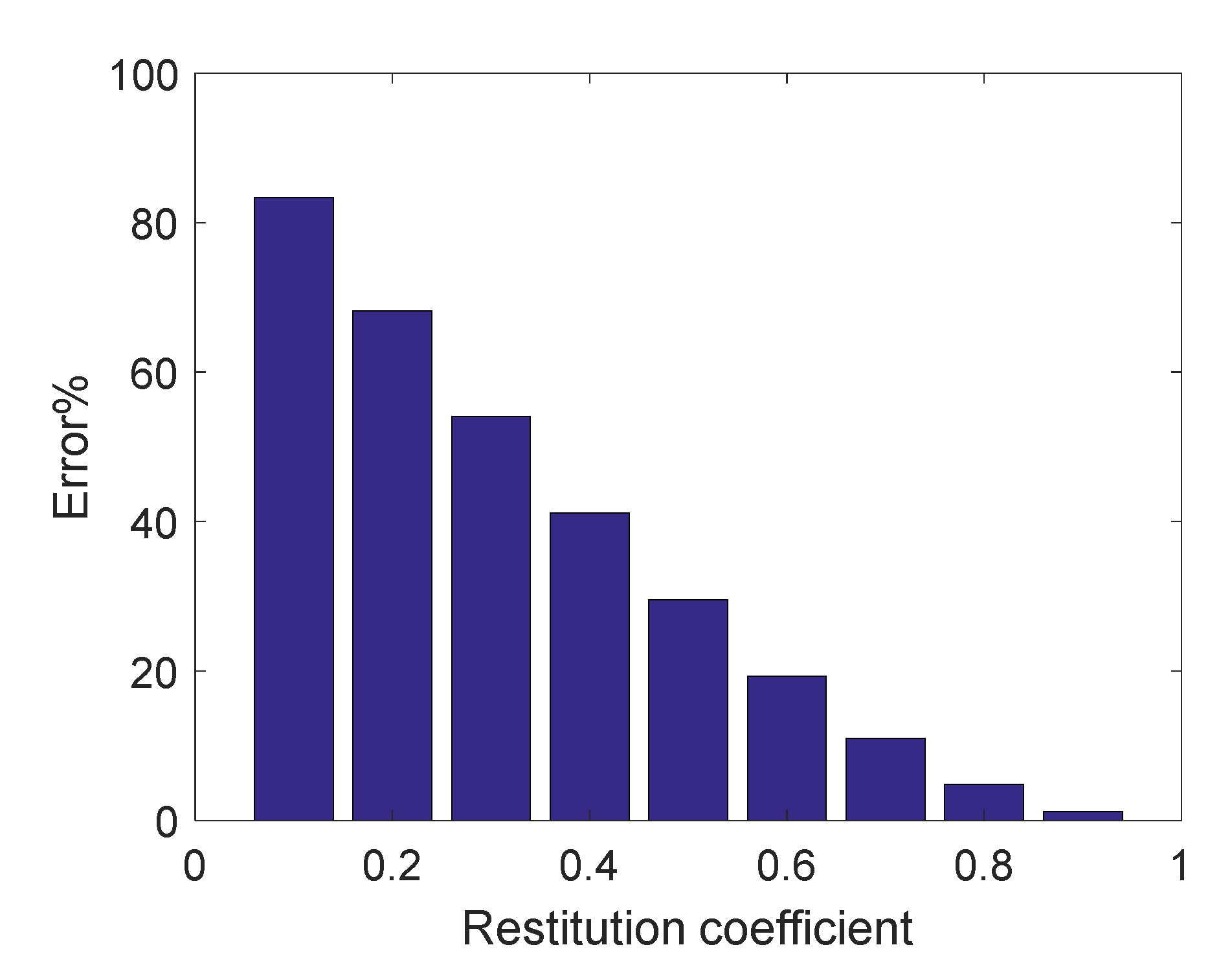
is proved to be unaffected by
and
, as shown in
Figure 4 and
Figure 5, and becomes increasingly smaller as
increases, as shown in
Figure 6.
Based on the above analysis, when the restitution coefficient
of the contact environment is large enough,
can be approximated by
, namely:
In addition, when the error
could not be ignored
can be obtained through the comparison of the contact force during the entire contact period, as shown in
Figure 3.
4. Configuration Optimization for Capturing Tumbling Target
The maximum contact force is regarded as an optimization indicator in this section, and it can be further written as follows by substituting Equation (22) into Equation (23):
where
From
Table 1, it is known that
as
, and thus
becomes
Letting
, its derivative can be calculated as:
It is proved that is an increasing function, and . Therefore, is a positive constant when the contact parameters and the initial relative contact velocity are determined.
Taking the derivative of Equation (24), the following equation can be obtained:
Therefore,
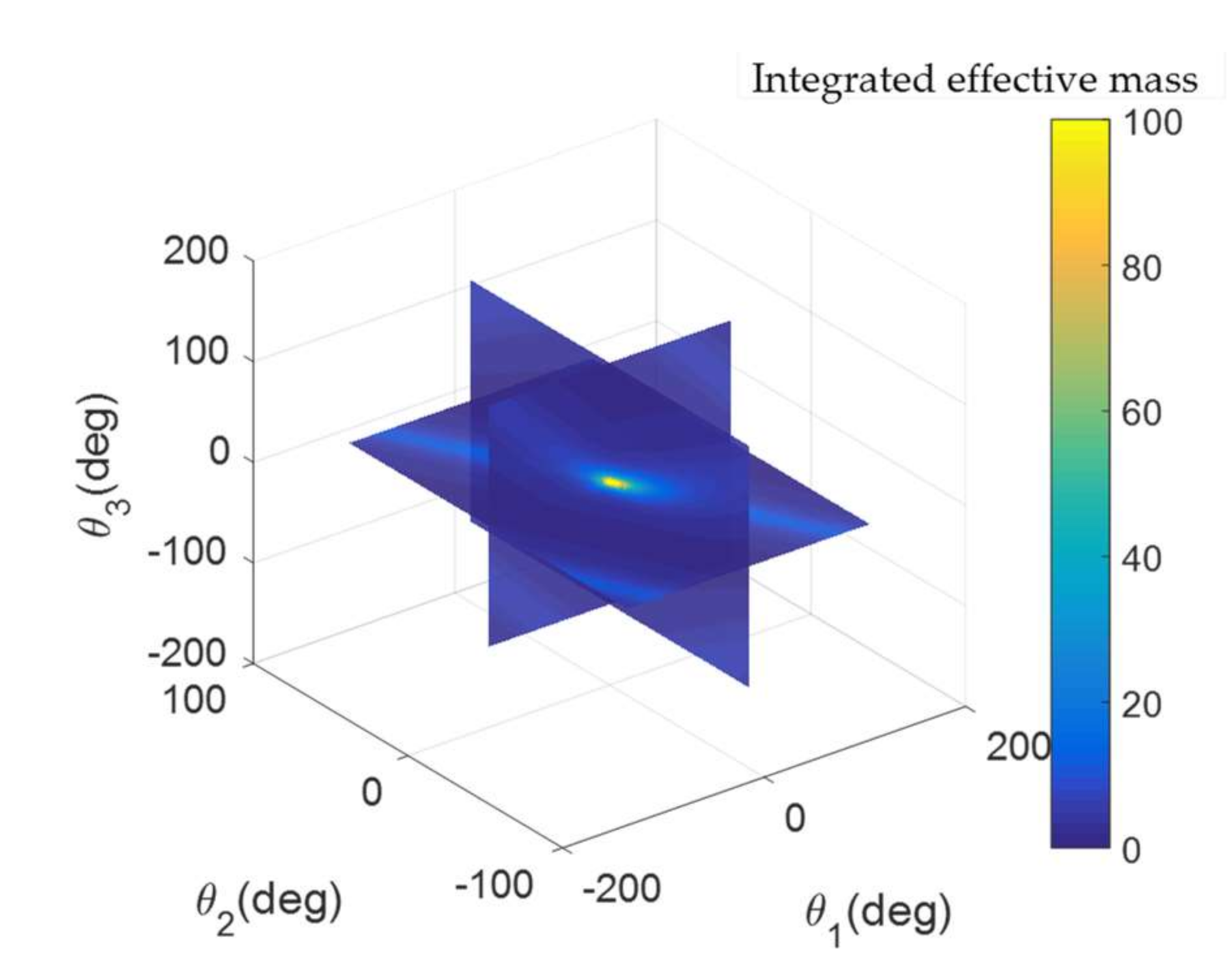
is an increasing function and a smaller integrated effective mass is safer. Generally, the kinematics parameters and dynamics parameters of the target and space robot are determined. The best way to decrease
is to optimize
by regulating the capture configuration. The relationship between integrated effective mass
and the capture configuration
can be directly established as:
where
is a general expression with variable
.
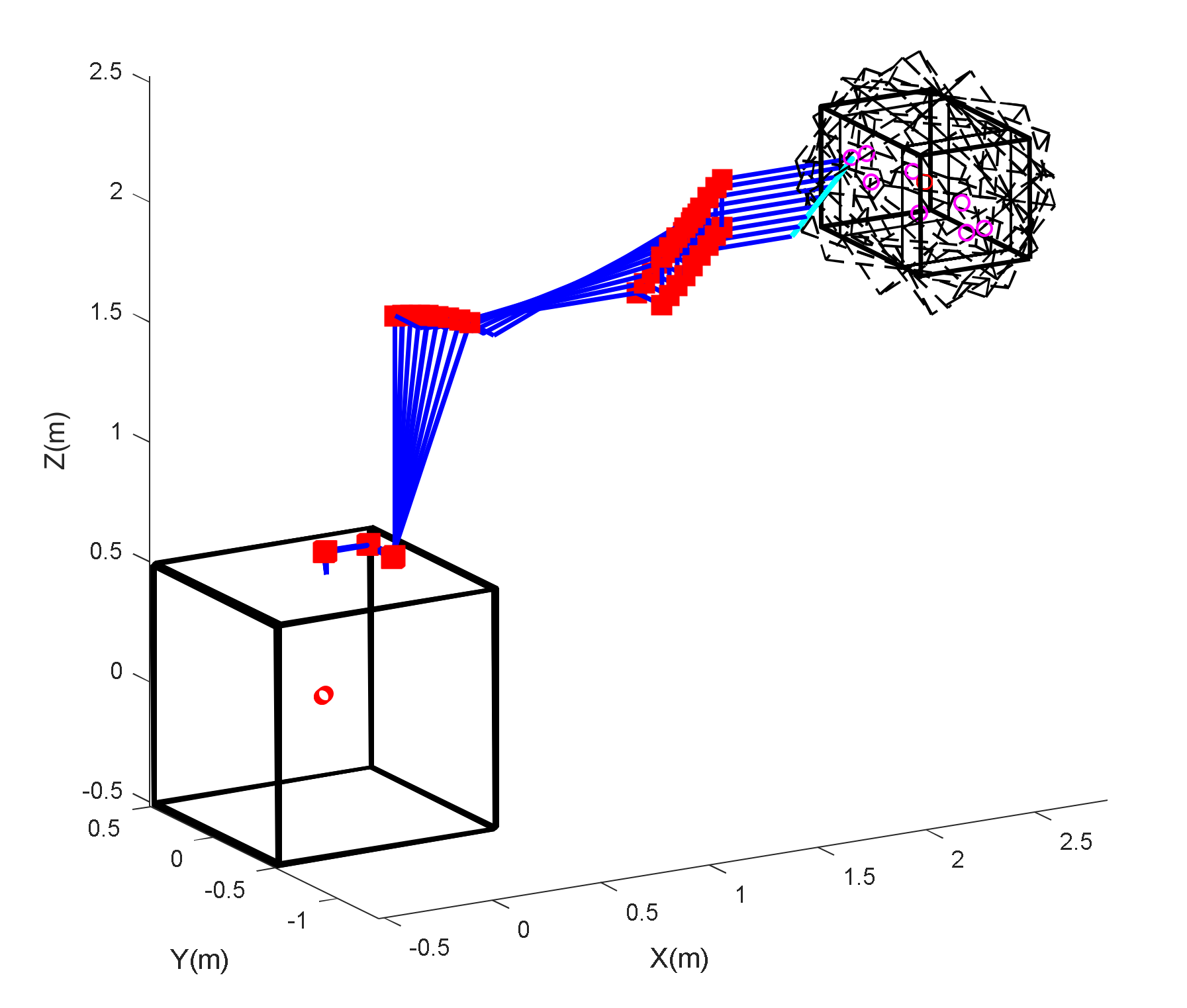
Assuming that, following a specific trajectory in Cartesian space is required in the capture task, a gradient-optimization method in null-space can be used [
7,
18]. For a free-floating space robot, the relationship between the joint angular velocity and end-effector velocity can be expressed as:
where
is the generalized Jacobian matrix of the free-floating space robot.
Non-minimum-norm solutions to Equation (29) based on a Jacobian pseudo-inverse can be written in the general form:
where
is the pseudo-inverse of the Jacobian matrix
.
is the null space of
,
is a gain coefficient, and
is an arbitrary vector that can be designed as:
Actually, task priority exists in Equation (31), where the desired trajectory following has higher priority and the optimization of the objective function by null-space has lower priority. This ensures that the space robot can first accurately reach the capture point along the preset trajectory, and then try to optimize the objective function as much as possible.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}