
Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace




Abstract
:1. Introduction
2. Background
2.1. Conflicts and Intrusions
2.2. Application of Traffic Segmentation and Alignment
2.3. Challenges of Constrained Urban Environments
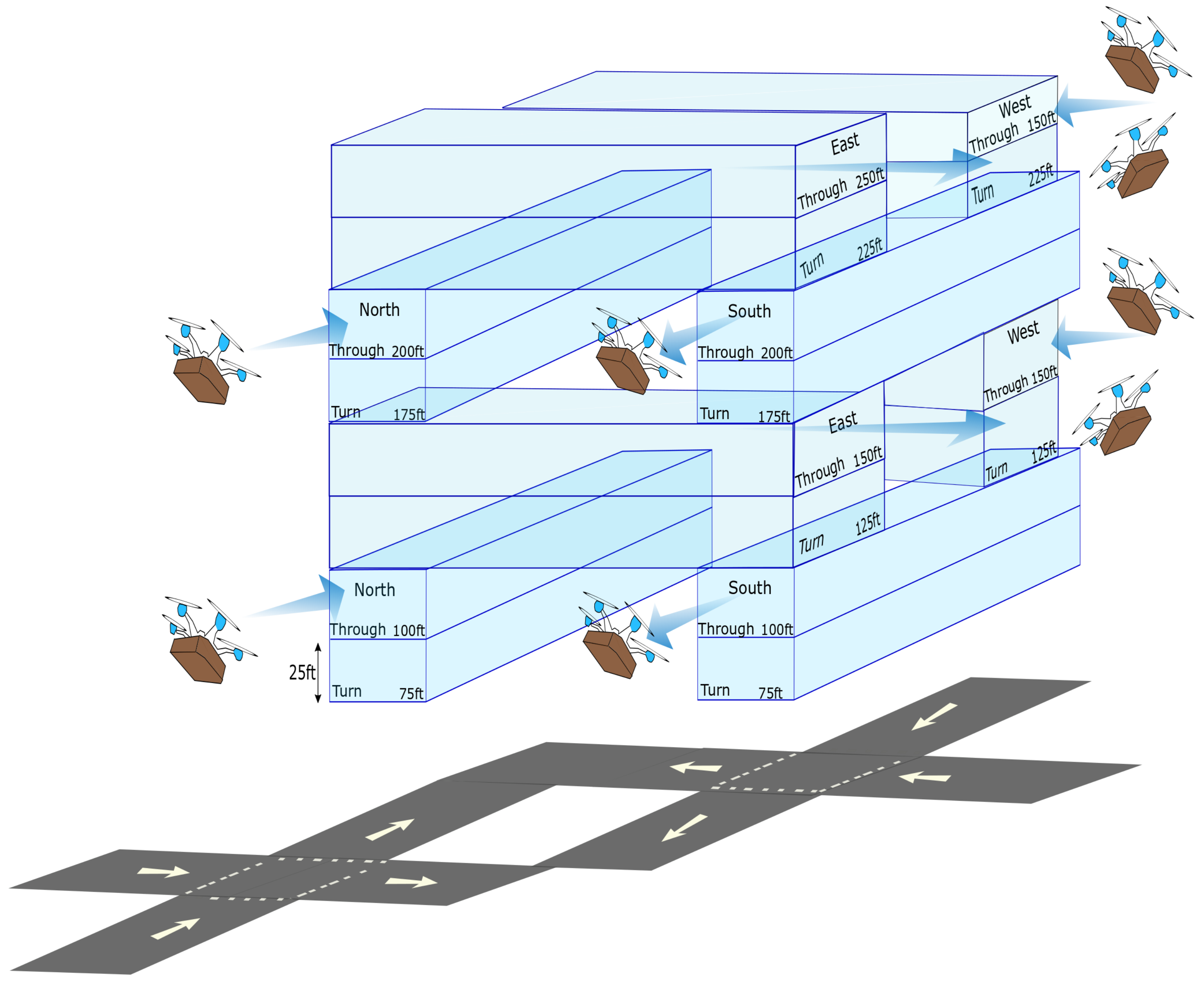
2.4. One-Way Airspace Design
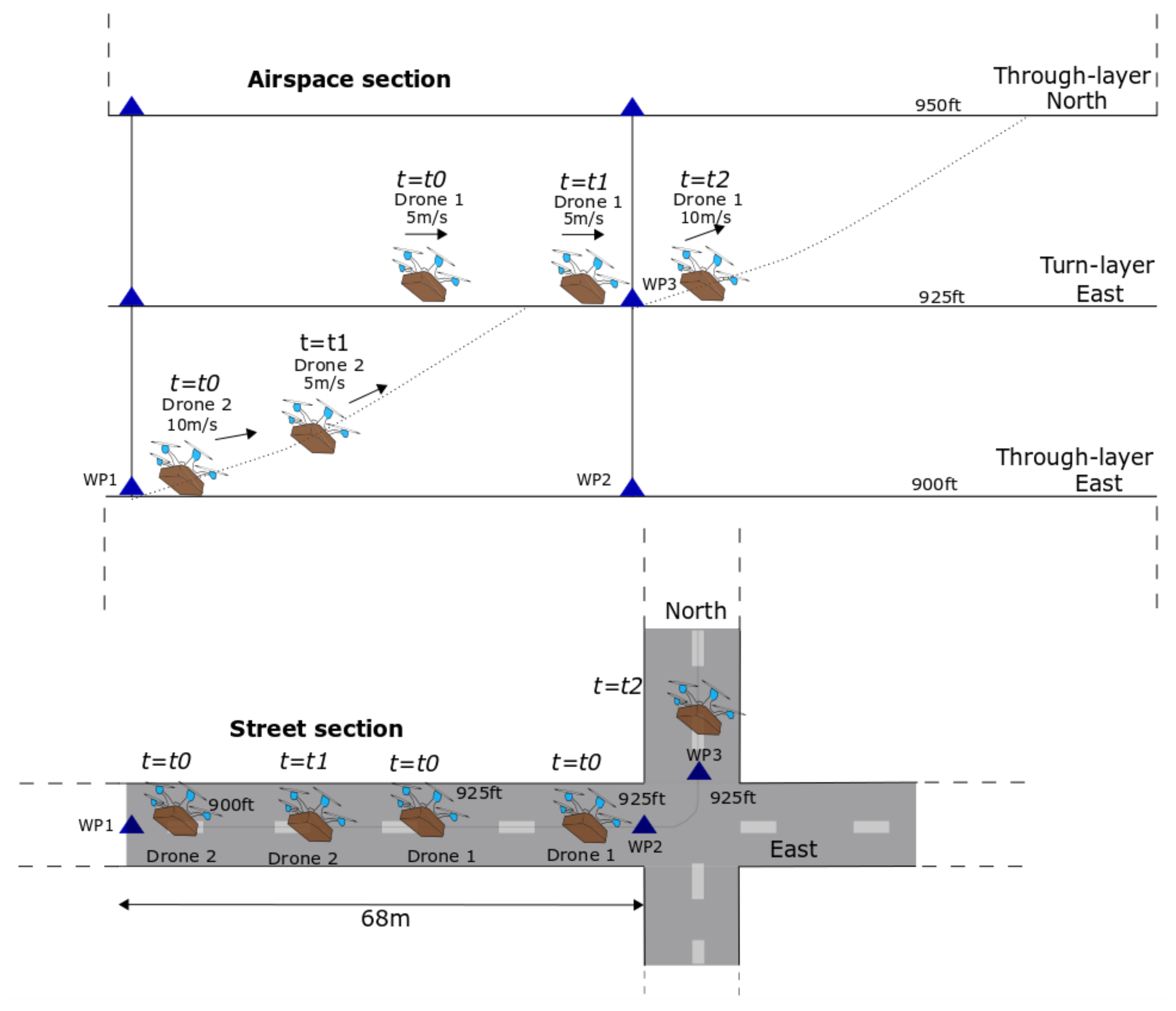
2.4.1. Through and Turn Altitude Layers
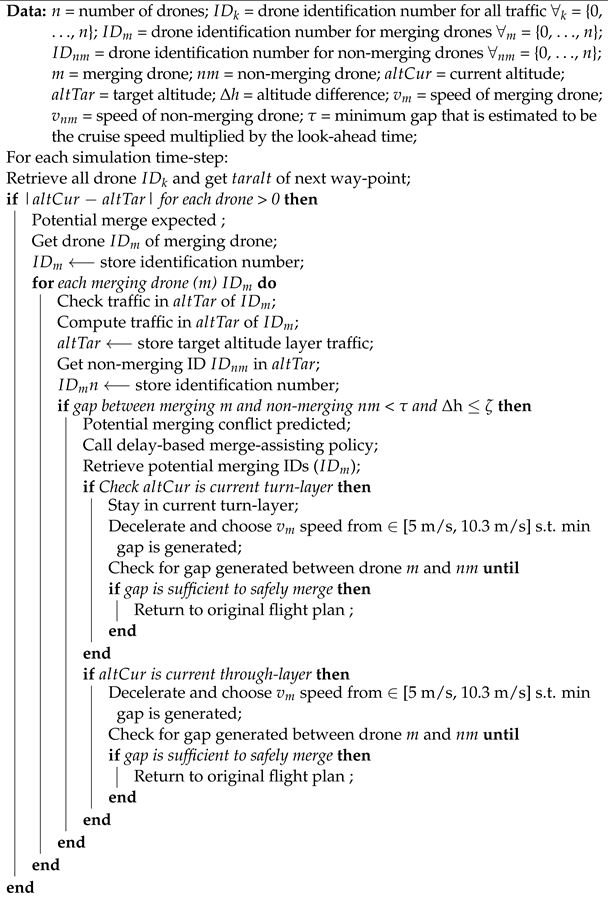
2.4.2. Altitude Layer Assignment
| Algorithm 1: Heuristic to align flight altitudes to their travel direction. |
if or then else if or then end if end if |
2.5. Emergence in the One-Way Airspace Design in Constrained Environments
3. Merging Conflicts and Intrusions
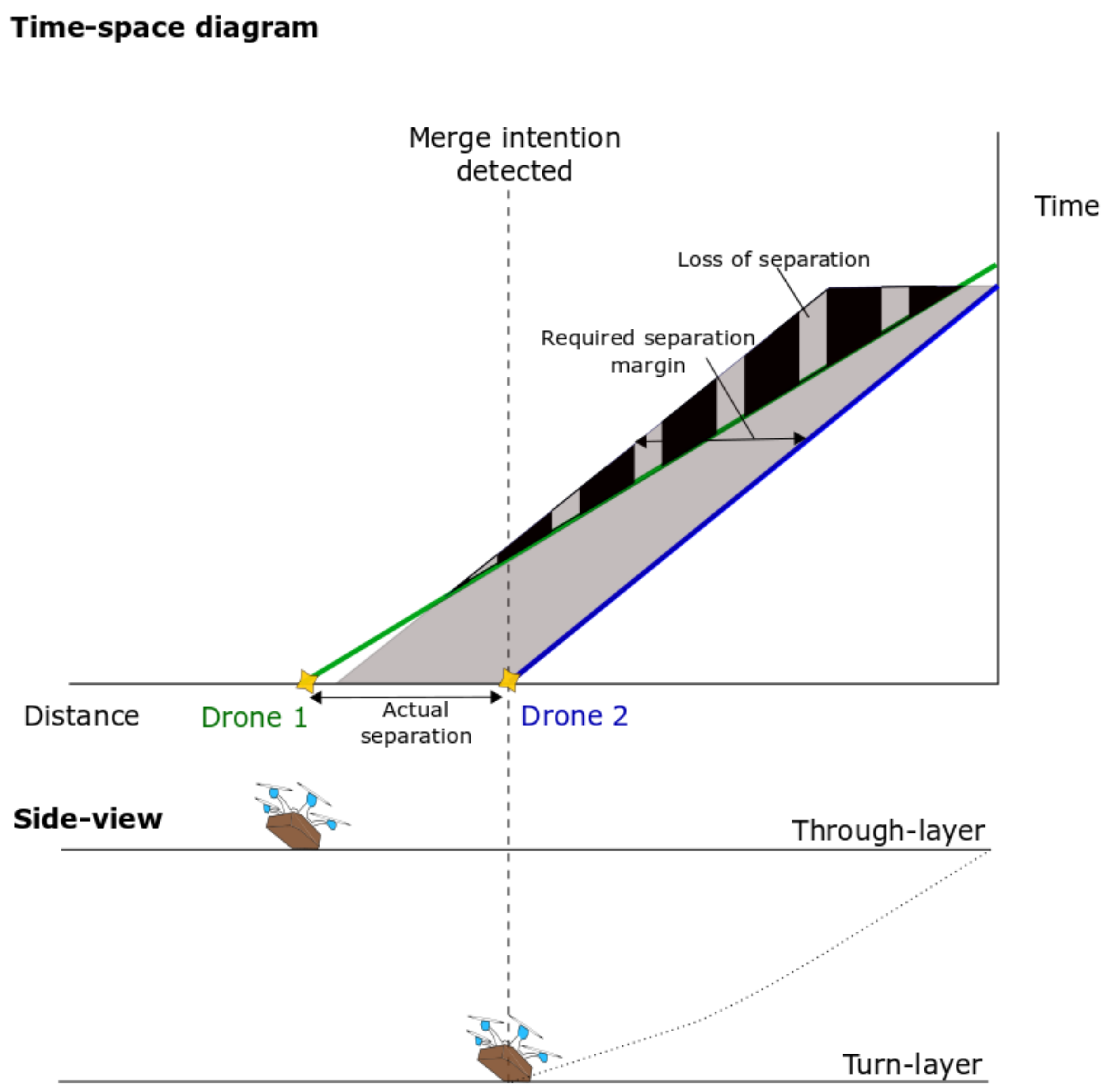
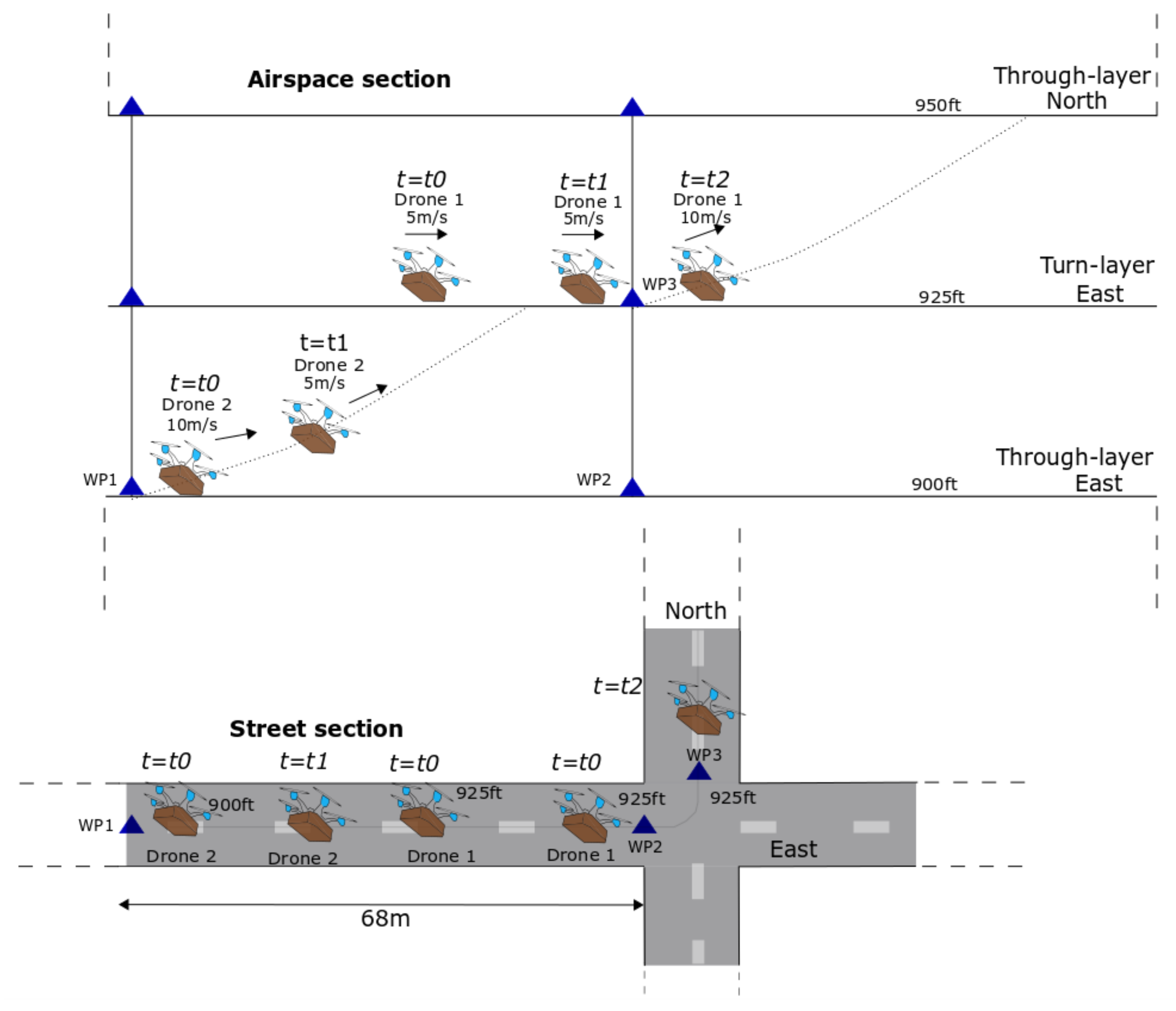
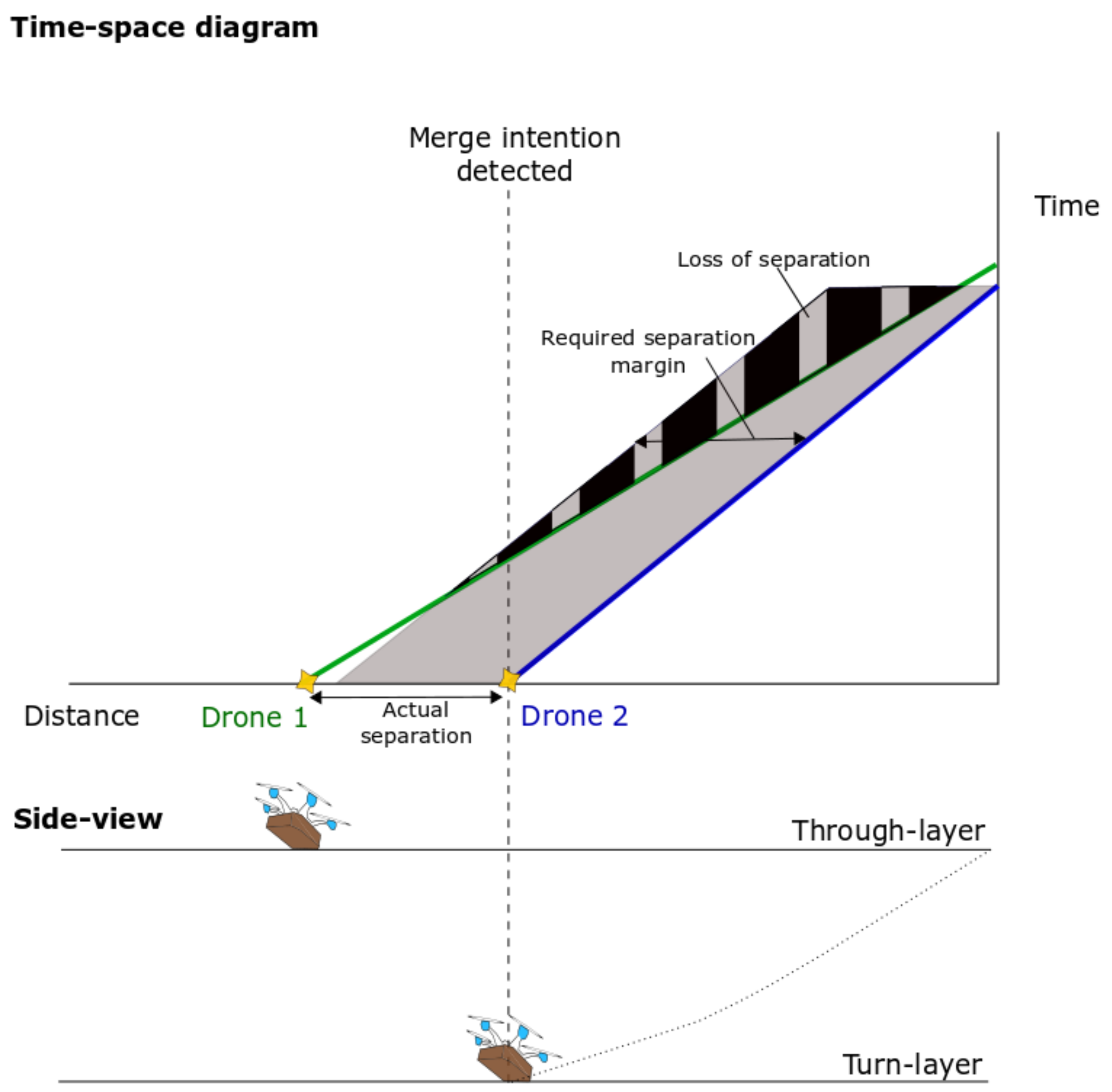
3.1. Time–Space Diagram
3.2. Merge Assistance Policies
| Algorithm 2: Speed-based merge assistance policy. |
 |
| Algorithm 3: Delay-based merge assistance policy. |
 |
4. Simulation Design
4.1. Simulation Development
4.1.1. Simulation Platform
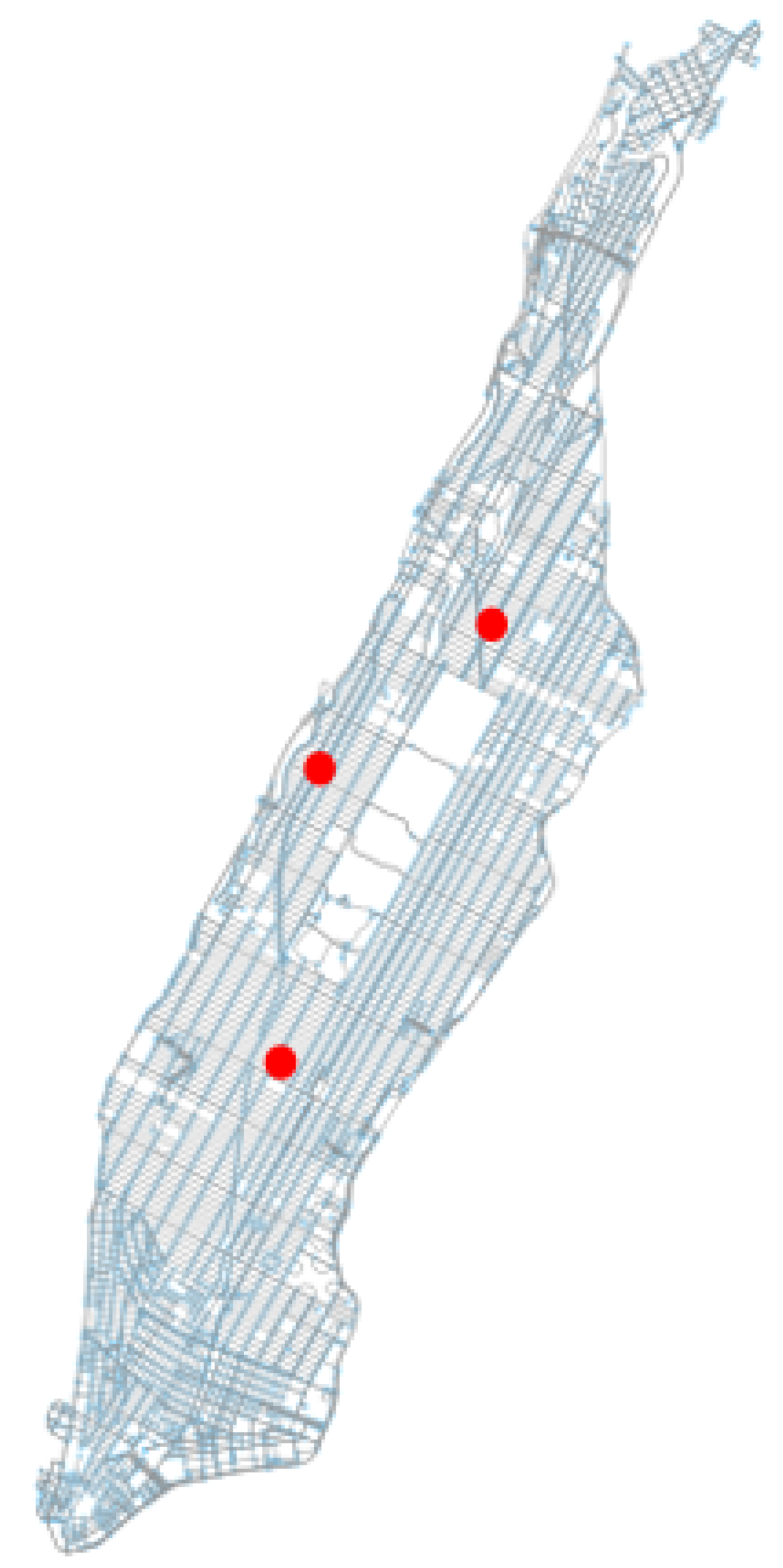
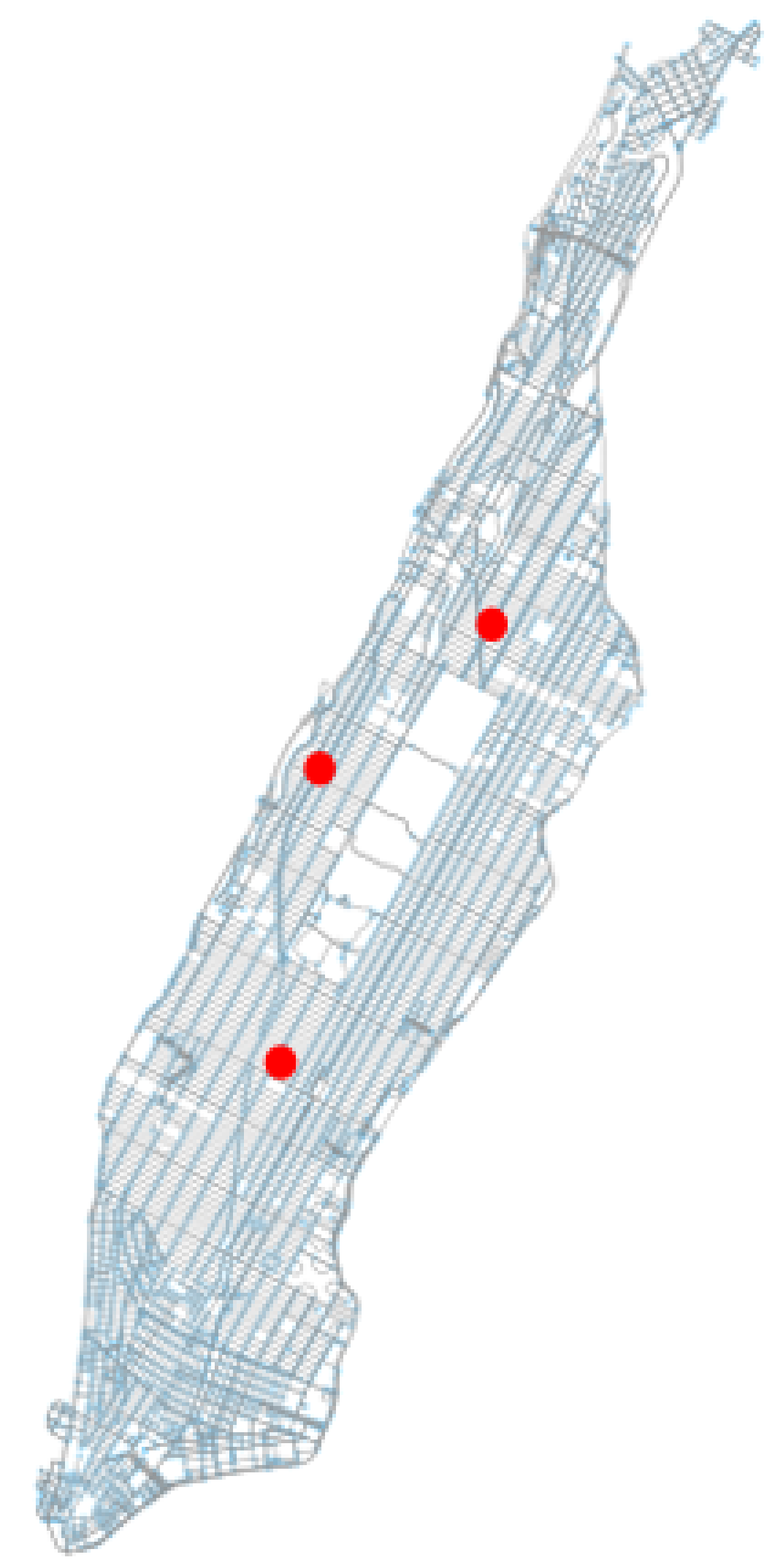
4.1.2. Testing Region
4.1.3. Conflict Detection and Resolution
| Algorithm 4: Basic (1-D) speed control conflict resolution. |
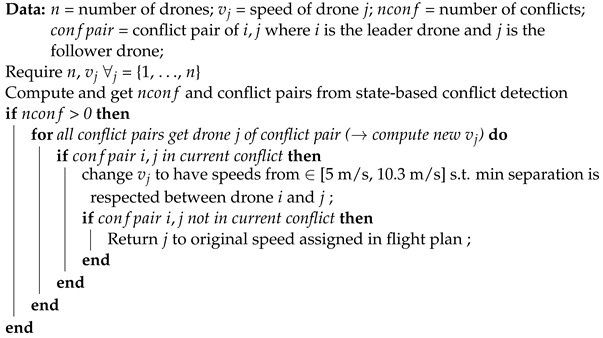 |
4.1.4. One-Way Airspace Concept Implementation
4.2. Independent Variables
- Airborne separation assurance conditions: with and without tactical conflict resolution;
- Merge assistance strategies: speed-based and delay-based assistance; and,
- Traffic demand: low, medium, and high traffic densities.
4.3. Dependent Measures
4.3.1. Safety
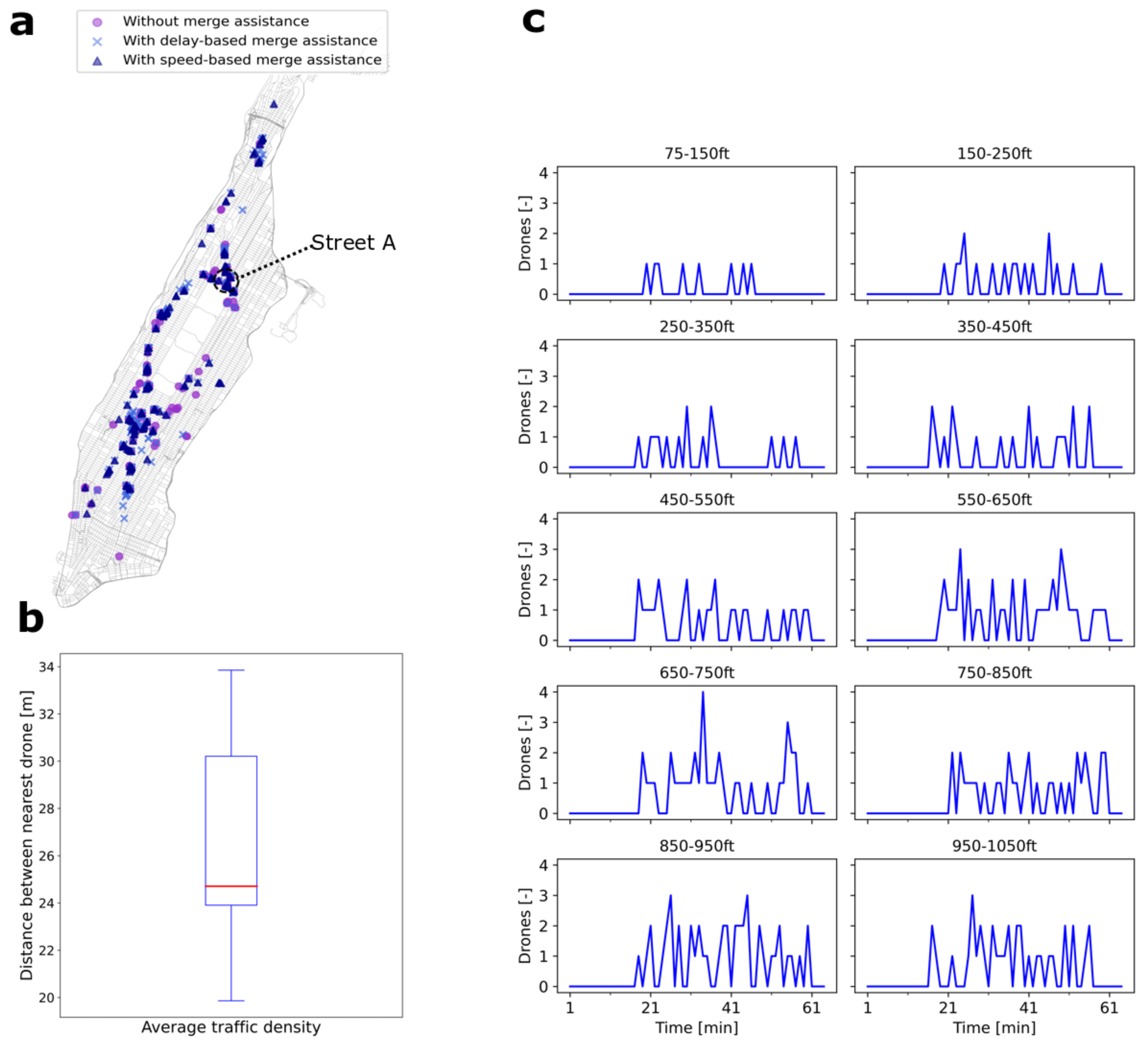
4.3.2. Distance between the Nearest Drone Pair on the Same Altitude Layers
4.3.3. Traffic Accumulation per Street
4.4. Experimental Hypotheses
5. Results
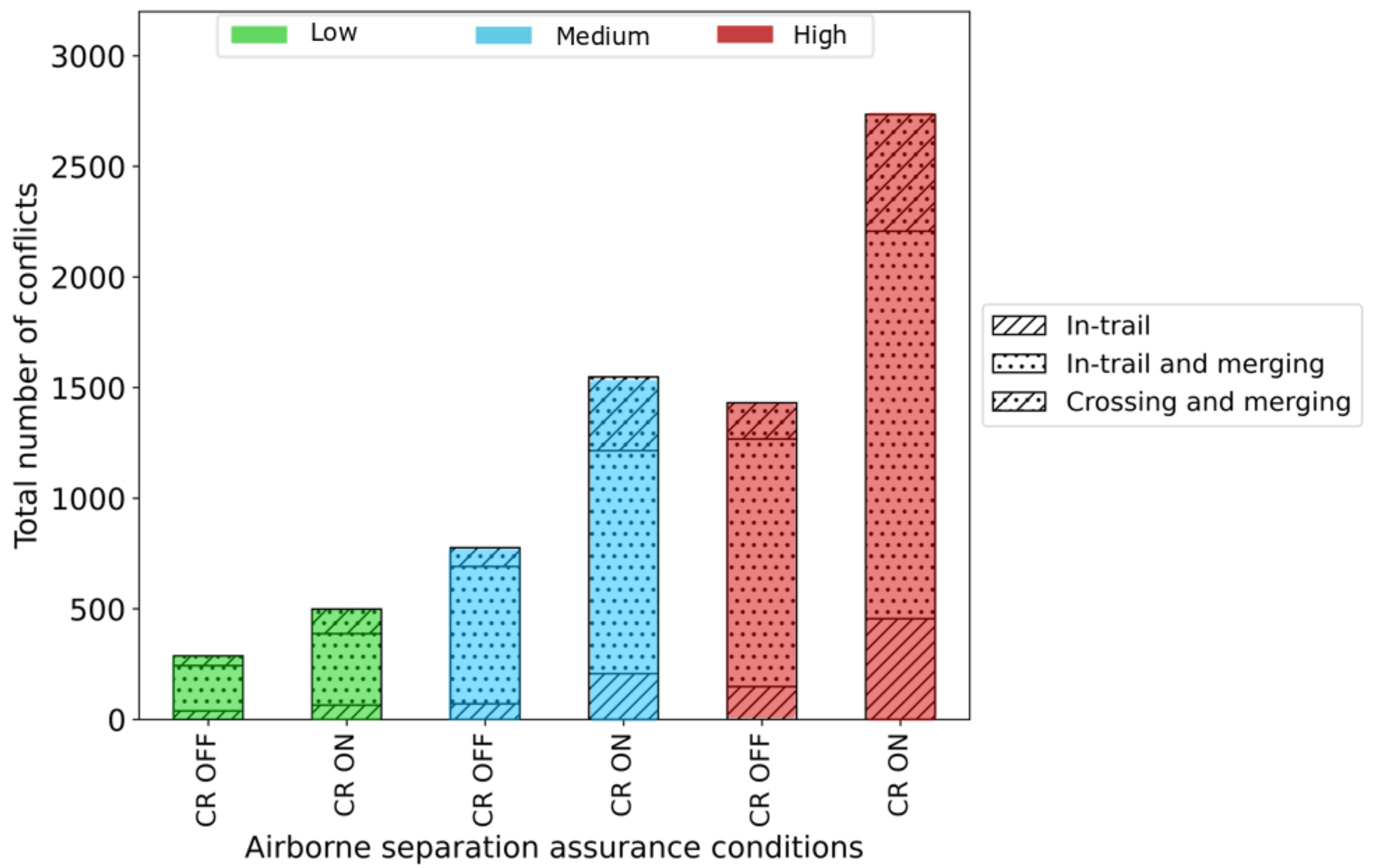
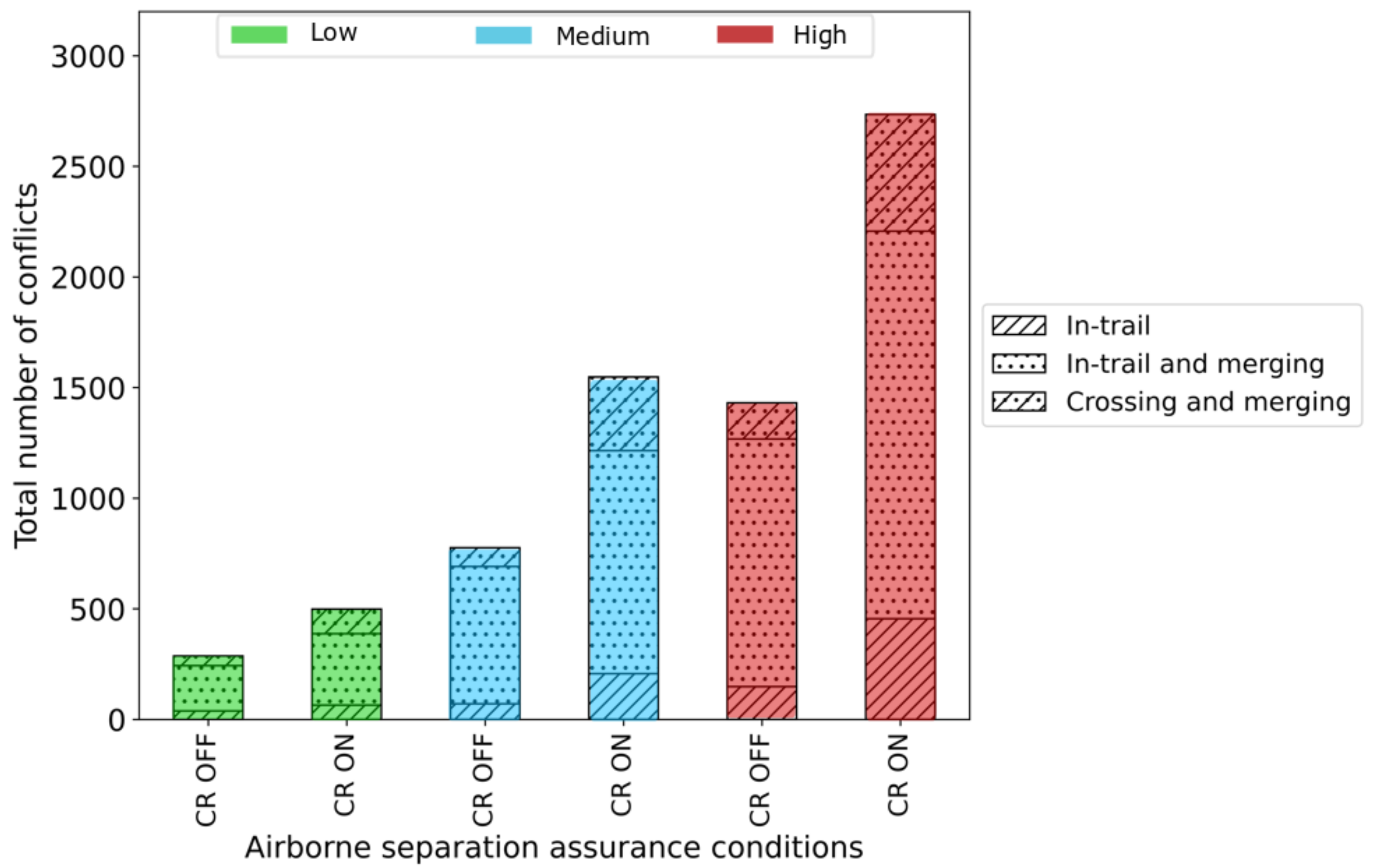
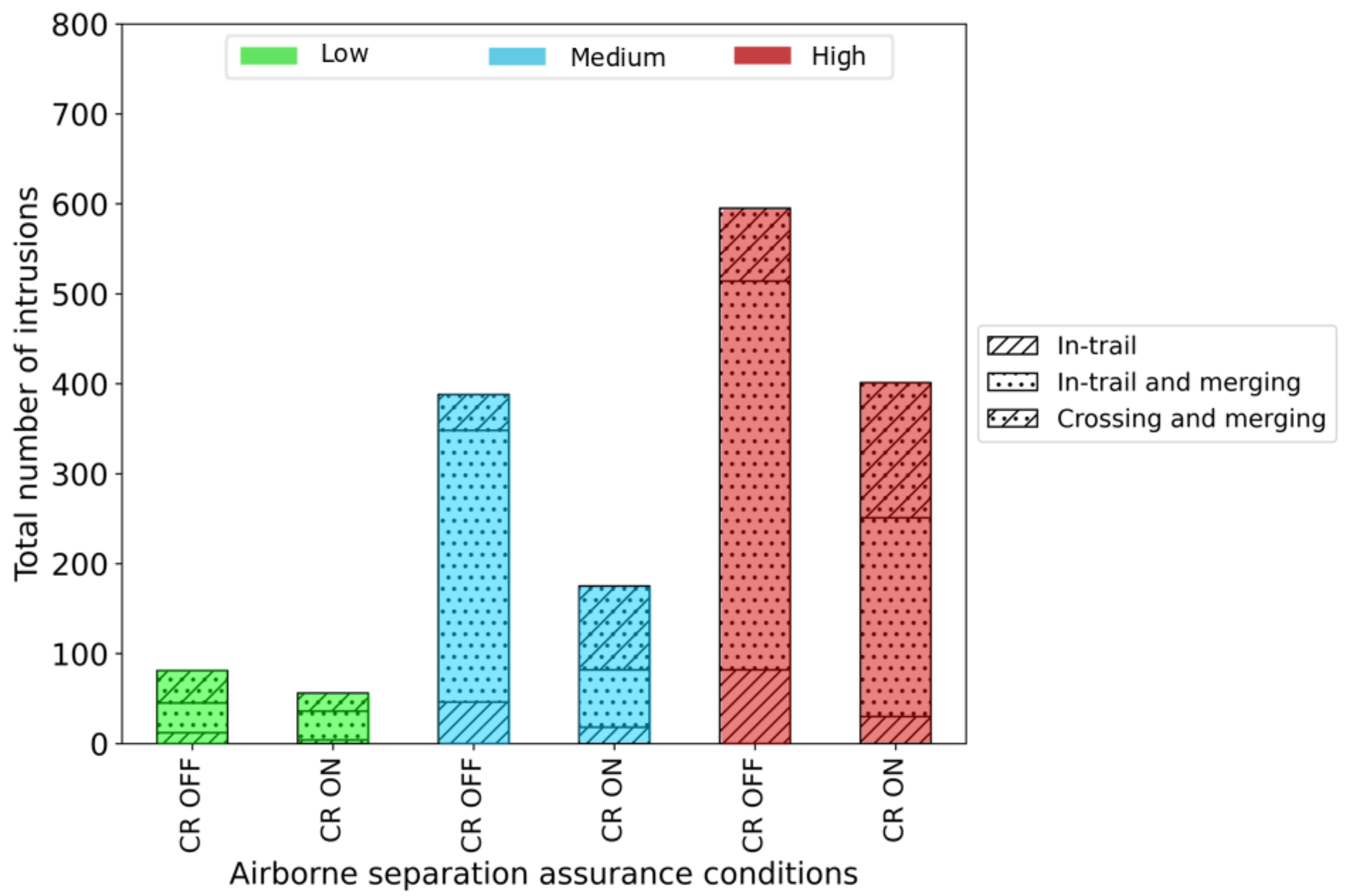
5.1. Total Number of Conflicts and Intrusions
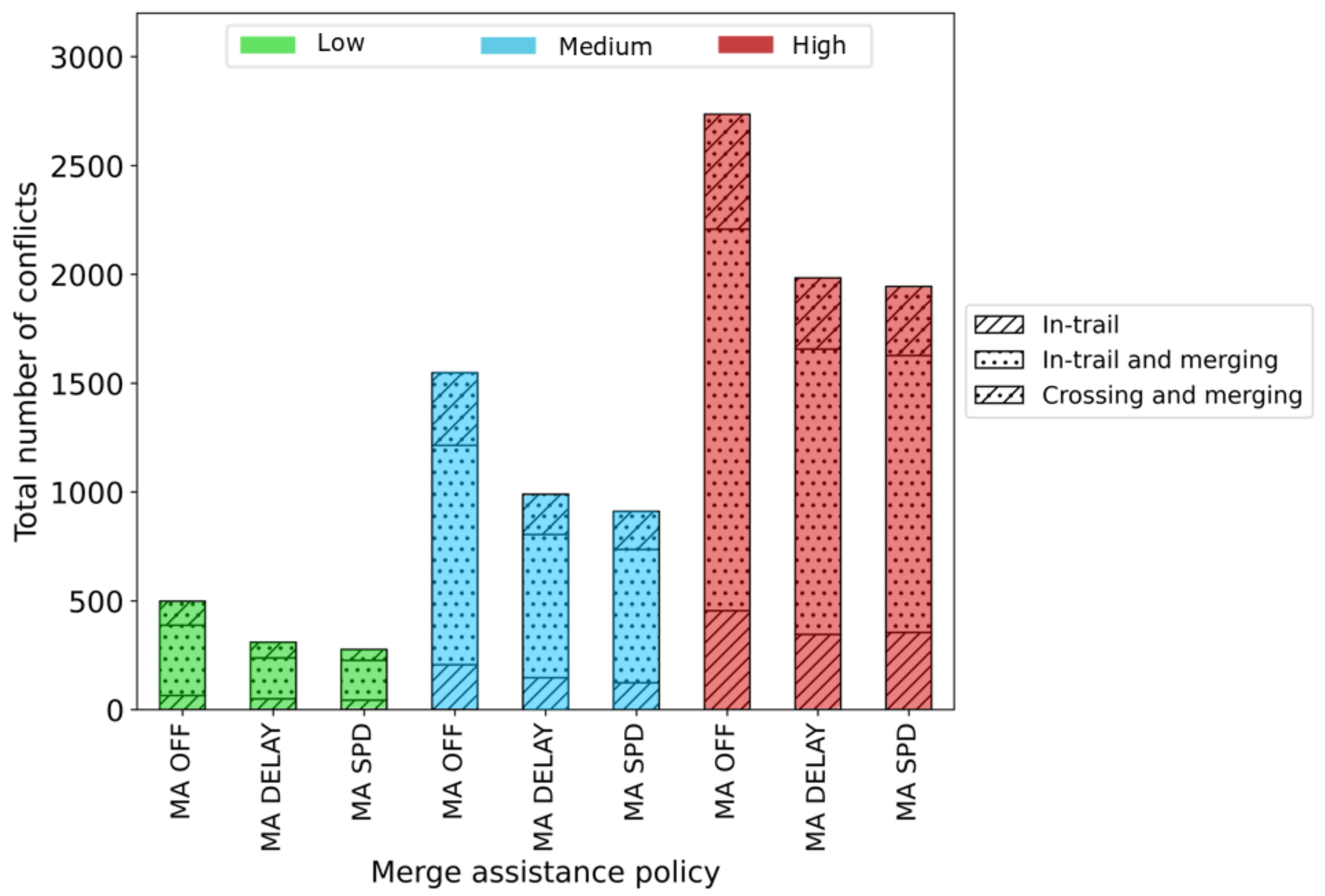
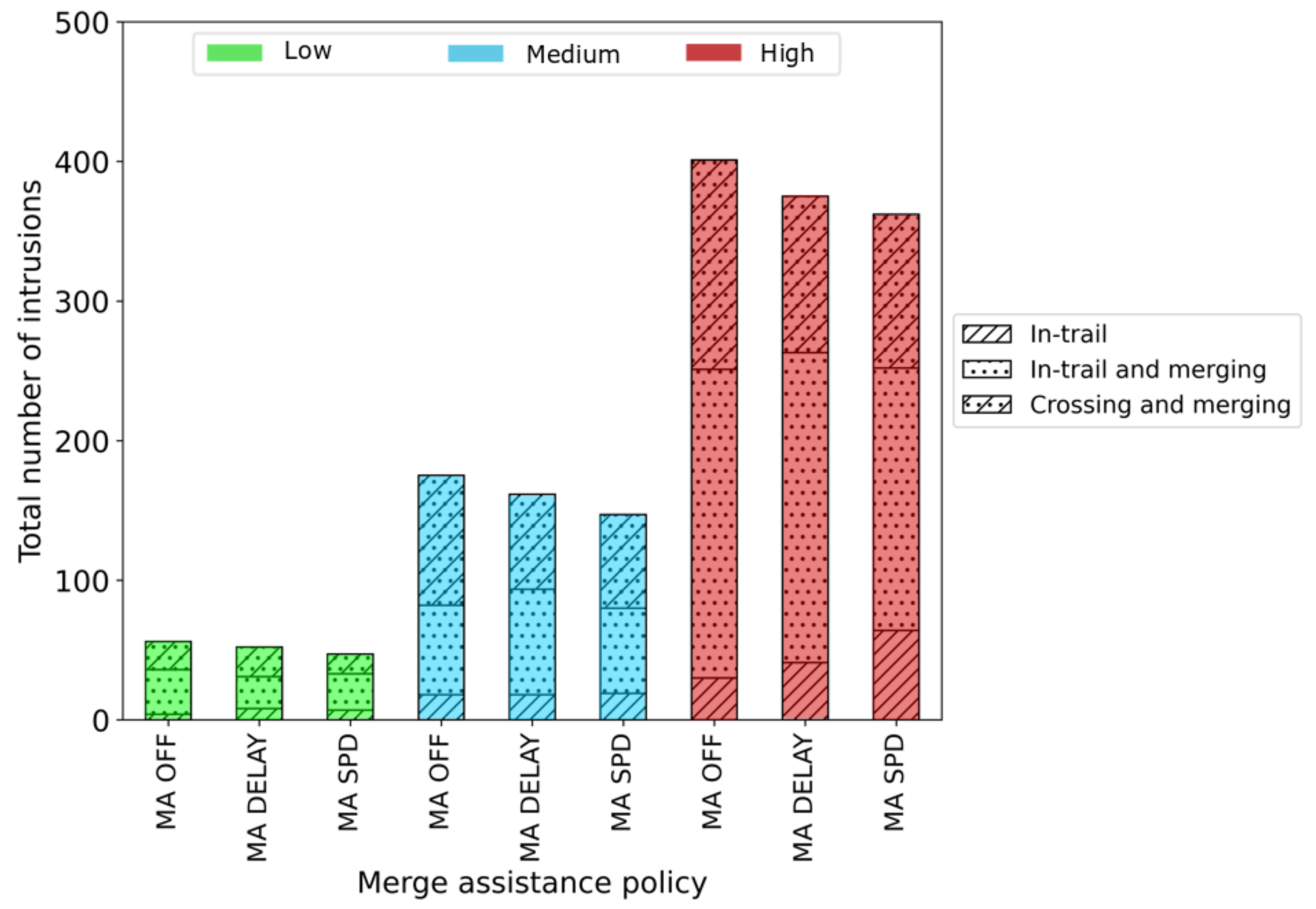
5.2. Effect of Merge Assistance Strategies on the Total Number of Conflicts and Intrusions
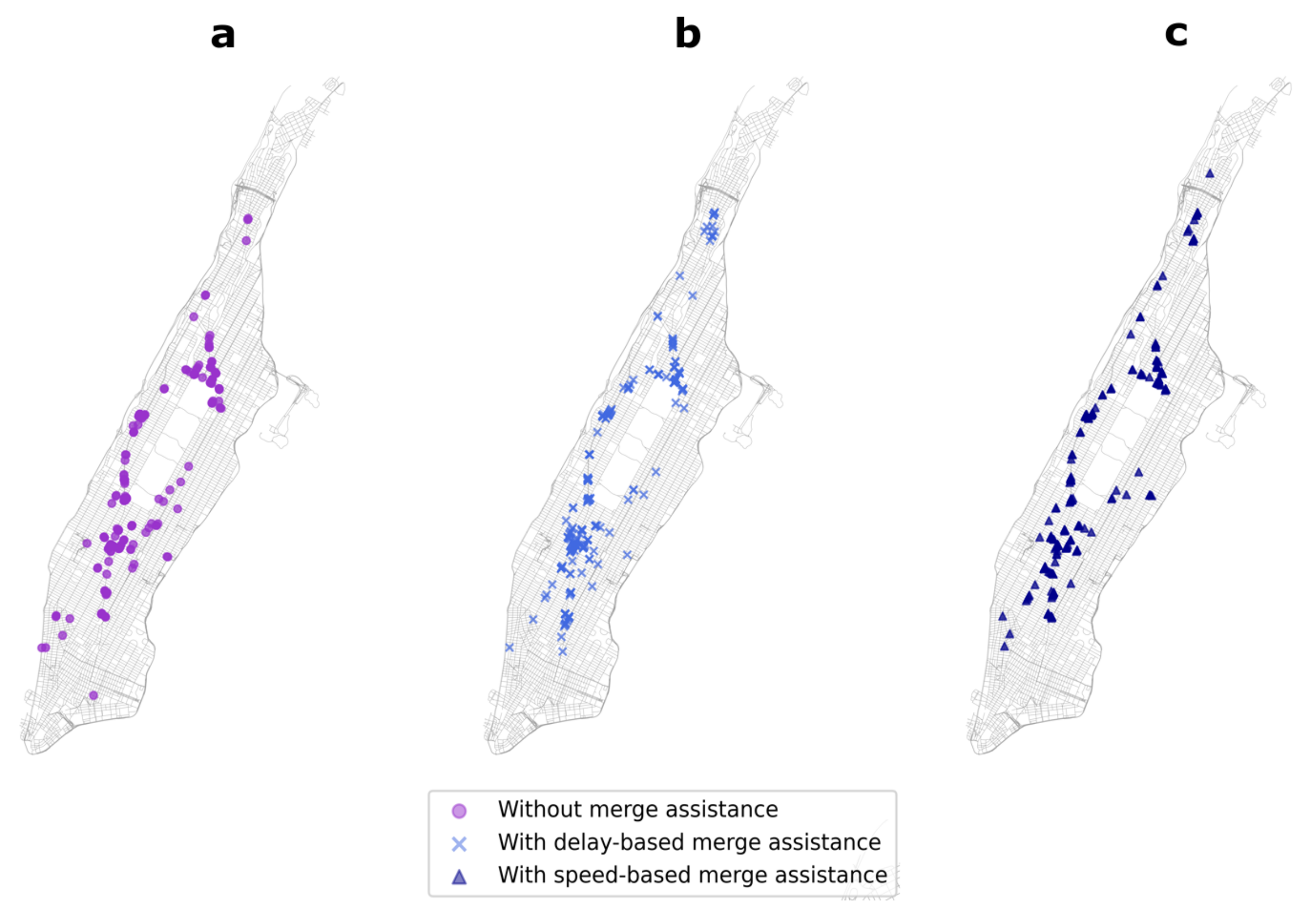
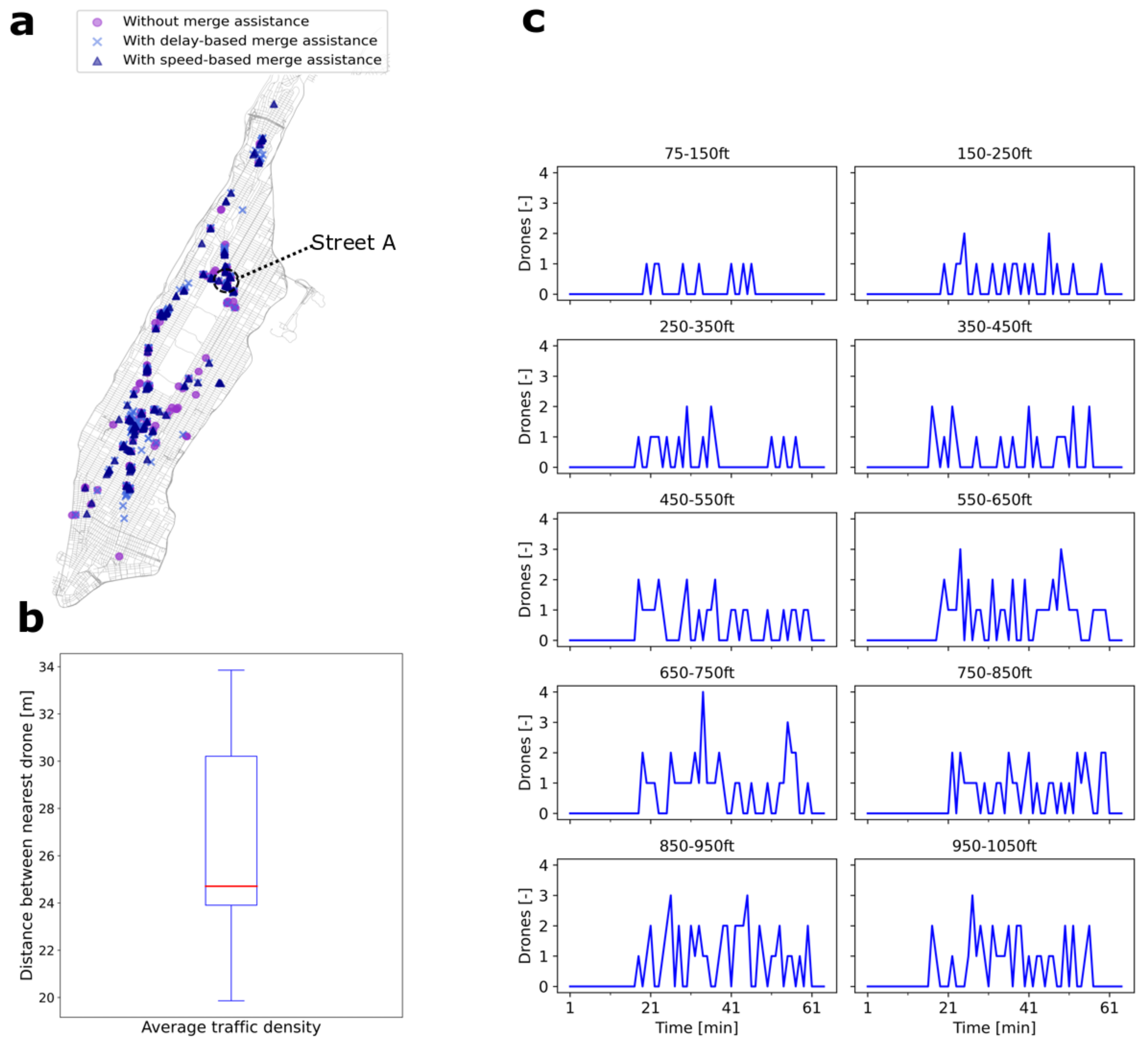
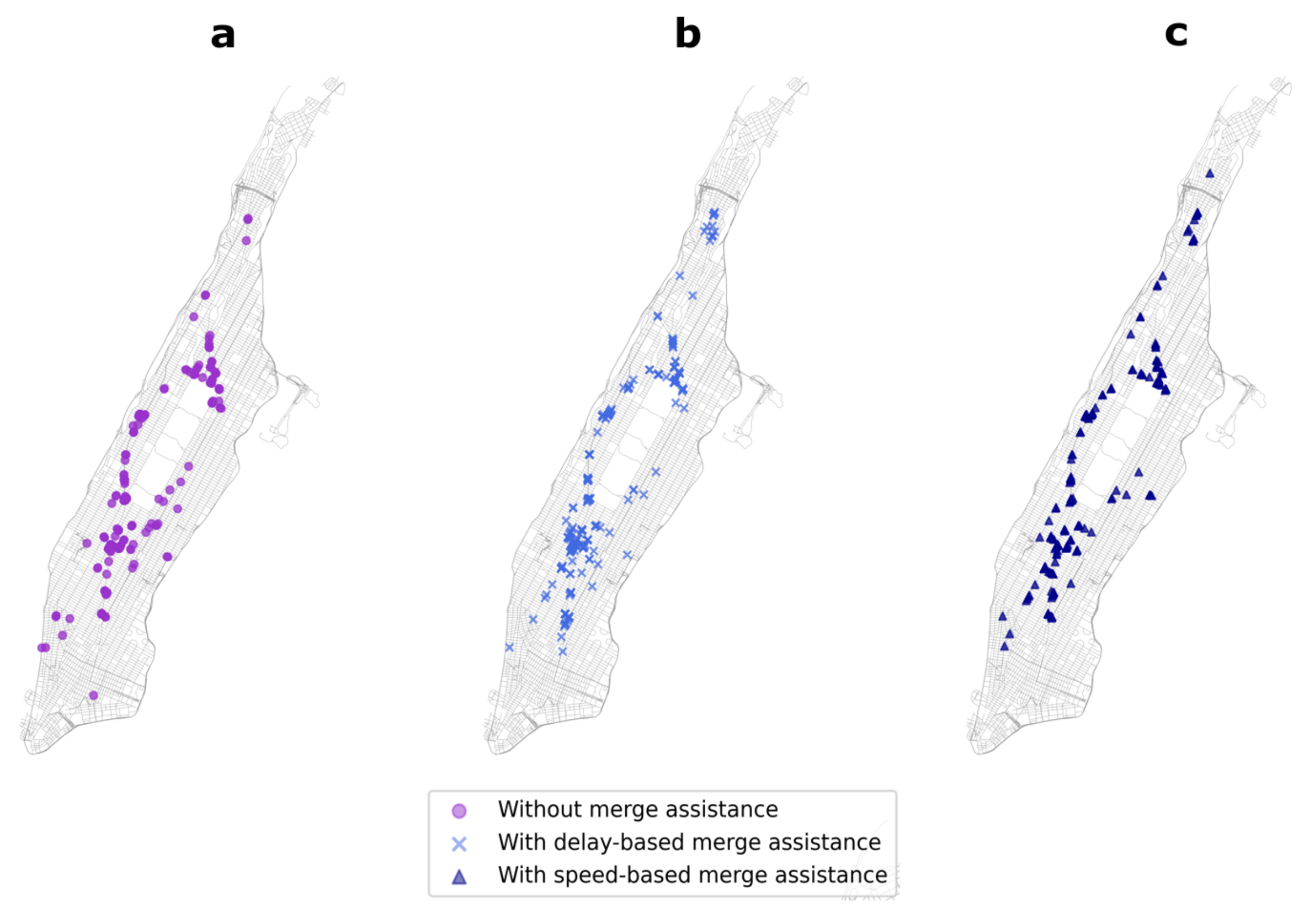
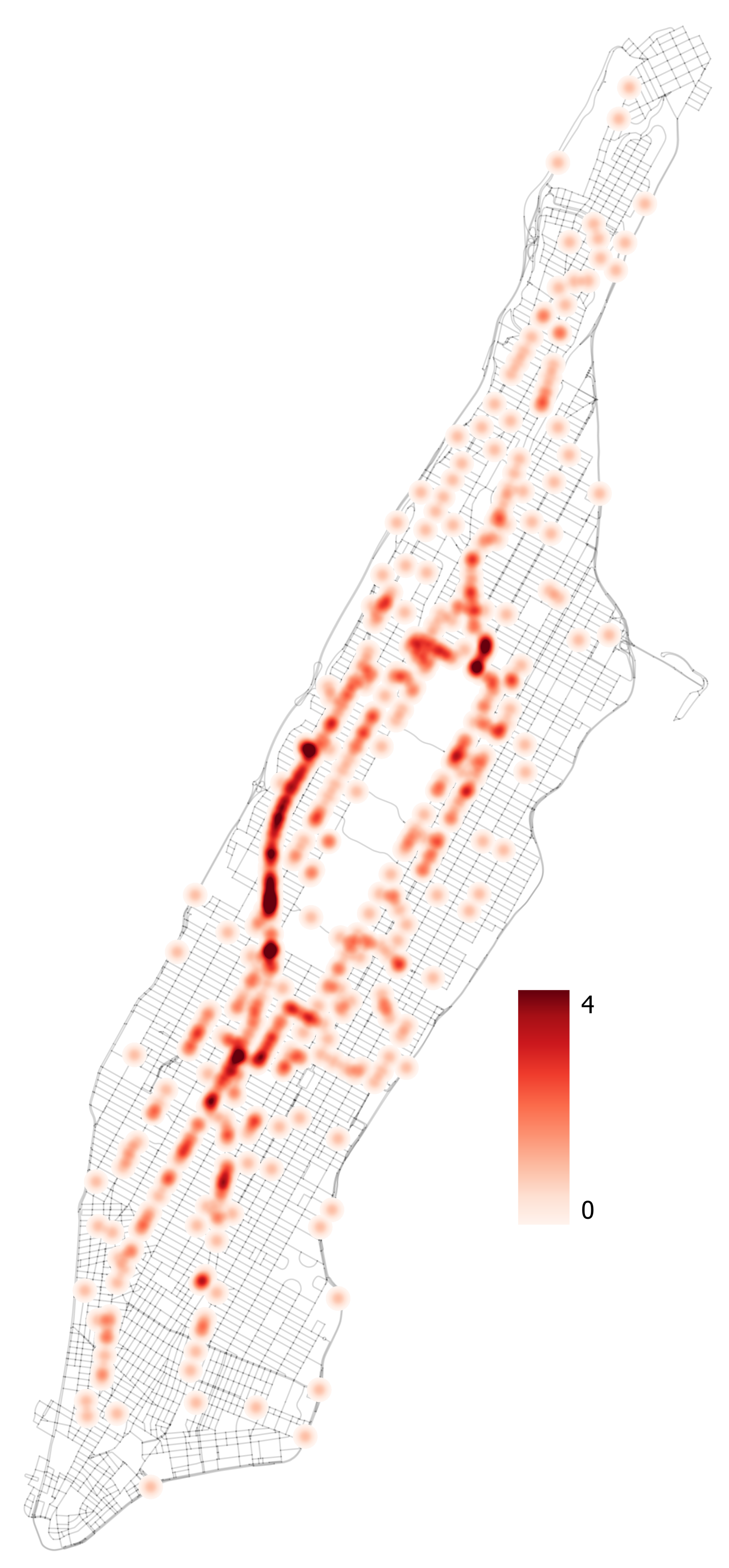
5.3. Spatial Distribution of Intrusions without and with Merge Assistance
5.4. Mesoscopic Traffic Observations
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Coops, N.; Goodbody, T.R.H.; Lin, C. Four steps to extend drone use in research. Nature 2019, 572, 433–435. [Google Scholar] [CrossRef] [PubMed]
- Frachtenberg, E. Practical drone delivery. Computer 2019, 52, 53–57. [Google Scholar] [CrossRef]
- Fernández-Ruiz, I. Drone delivery of defibrillators for sudden cardiac arrest could shorten response times. Nat. Rev. Cardiol. 2021, 18, 740. [Google Scholar] [CrossRef] [PubMed]
- Schierbeck, S.; Hollenberg, J.; Nord, A.; Svensson, L.; Nordberg, P.; Ringh, M.; Forsberg, S.; Lundgren, P.; Axelsson, C.; Claesson, A. Automated external defibrillators delivered by drones to patients with suspected out-of-hospital cardiac arrest. Eur. Heart J. 2021, 42, ehab498. [Google Scholar] [CrossRef] [PubMed]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Stolaroff, J.K.; Samaras, C.; Mitchell, A.S.; Ceperley, D.; Neill, E.R.O.; Lubers, A. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef]
- Park, J.; Kim, S.; Suh, K. A comparative analysis of the environmental benefits of drone-based delivery services in urban and rural areas. Sustainability 2018, 10, 888. [Google Scholar] [CrossRef] [Green Version]
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Estimation of traffic density from drone-based delivery in very low level urban airspace. J. Air Transp. Manag. 2020, 88, 101862. [Google Scholar] [CrossRef]
- Petrovsky, A.; Doole, M.; Ellerbroek, J.; Hoekstra, J.M.; Tomasello, F. Challenges with obstacle data for manned and unmanned aviation. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. ISPRS Arch. 2018, 42, 143–149. [Google Scholar] [CrossRef] [Green Version]
- Watkins, S.; Burry, J.; Mohamed, A.; Marino, M.; Prudden, S.; Fisher, A.; Kloet, N.; Jakobi, T.; Clothier, R. Ten questions concerning the use of drones in urban environments. Build. Environ. 2020, 167, 106458. [Google Scholar] [CrossRef]
- Jang, D.S.; Ippolito, C.A.; Sankararaman, S.; Stepanyan, V. Concepts of Airspace Structures and System Analysis for UAS Traffic flows for Urban Areas. In Proceedings of the AIAA Information Systems-AIAA Infotech@Aerospace, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
- Tony, L.A.; Ratnoo, A.; Ghose, D. Lane Geometry, Compliance Levels, and Adaptive Geo-fencing in CORRIDRONE Architecture for Urban Mobility. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1611–1617. [Google Scholar]
- Hunter, G.; Wei, P. Service-oriented separation assurance for small UAS traffic management. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–11. [Google Scholar]
- Sacharny, D.; Henderson, T.C. A lane-based approach for large-scale strategic conflict management for UAS service suppliers. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Sacharny, D.; Henderson, T.C.; Cline, M. Large-Scale UAS Traffic Management (UTM) Structure. In Proceedings of the 2020 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Karlsruhe, Germany, 14–16 September 2020; pp. 7–12. [Google Scholar]
- Low, K.; Gan, L.; Mao, S. A Preliminary Study in Managing Safe and Efficient Low-Altitude Unmanned Aircraft System Operations in a Densely Built-Up Urban Environment; Air Traffic Management Research Institute, School of Mechanical and Aerospace Engineering, Nanyang Technological University: Singapore, 2014. [Google Scholar]
- Mohamed Salleh, M.F.B.; Wanchao, C.; Wang, Z.; Huang, S.; Tan, D.Y.; Huang, T.; Low, K.H. Preliminary concept of adaptive urban airspace management for unmanned aircraft operations. In Proceedings of the 2018 AIAA Information Systems-AIAA Infotech@Aerospace, Kissimmee, FL, USA, 8–12 January 2018; p. 2260. [Google Scholar]
- McCarthy, T.; Pforte, L.; Burke, R. Fundamental elements of an urban UTM. Aerospace 2020, 7, 85. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Alarcón, V.; García, M.; Alarcón, F.; Viguria, A.; Martínez, Á.; Janisch, D.; Acevedo, J.J.; Maza, I.; Ollero, A. Procedures for the integration of drones into the airspace based on U-space services. Aerospace 2020, 7, 128. [Google Scholar] [CrossRef]
- Capitán, C.; Pérez-León, H.; Capitán, J.; Castaño, Á.; Ollero, A. Unmanned Aerial Traffic Management System Architecture for U-Space In-Flight Services. Appl. Sci. 2021, 11, 3995. [Google Scholar] [CrossRef]
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Bussink, F.; Nieuwenhuisen, D.; Vidosavljevic, A.; Kern, S. Metropolis: Relating Airspace Structure and Capacity for Extreme Traffic Densities. In Proceedings of the Europe Air Traffic Management Research and Development Seminar, Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Bussink, F.; Nieuwenhuisen, D.; Vidosavljevic, A.; Kern, S. Analysis of airspace structure and capacity for decentralised separation using fast-time simulations. J. Guid. Control Dyn. 2017, 40, 38–51. [Google Scholar] [CrossRef] [Green Version]
- Hoekstra, J.M.; Maas, J.; Tra, M.; Sunil, E. How do layered airspace design parameters affect airspace capacity and safety? In Proceedings of the 7th International Conference on Research in Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- Hoekstra, J.M.; Ellerbroek, J.; Sunil, E.; Maas, J. Geovectoring: Reducing Traffic Complexity to Increase the Capacity of UAV airspace. In Proceedings of the 2018 International Conference on Research in Air Transportation, Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- Garber, N.; Hoel, L. Traffic & Highway Engineering; Cengage Learning: Boston, MA, USA, 2008; p. 937. [Google Scholar]
- Chakroborty, P.; Das, A. Principles of Transportation Engineering; PHI Learning Pvt. Ltd.: New Delhi, India, 2005; p. 520. [Google Scholar]
- Urmson, C.; Anhalt, J.; Bagnell, D.; Baker, C.; Bittner, R.; Clark, M.; Dolan, J.; Duggins, D.; Galatali, T.; Geyer, C.; et al. Autonomous driving in urban environments: Boss and the urban challenge. J. Field Robot. 2008, 25, 425–466. [Google Scholar] [CrossRef] [Green Version]
- Hancock, P.A.; Nourbakhsh, I.; Stewart, J. On the future of transportation in an era of automated and autonomous vehicles. Proc. Natl. Acad. Sci. USA 2019, 116, 7684–7691. [Google Scholar] [CrossRef] [Green Version]
- Doole, M.; Ellerbroek, J.; Knoop, V.L.; Hoekstra, J.M. Constrained Urban Airspace Design for Large-Scale Drone-Based Delivery Traffic. Aerospace 2021, 8, 38. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Drone delivery: Nature of traffic conflicts in constrained urban airspace environments. In Proceedings of the Delft International Conference on Urban Air Mobility (DICUAM), Delft, The Netherlands, 15–17 March 2021. [Google Scholar]
- Knoop, V.L. Introduction to Traffic Flow Theory; Course Textbook; Delft University of Technology: Delft, The Netherlands, 2017; pp. 13–14. [Google Scholar]
- Knoop, V.L.; Duret, A.; Buisson, C.; van Arem, B. Lane distribution of traffic near merging zones influence of variable speed limits. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Madeira Island, Portugal, 19–22 September 2010; pp. 485–490. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1066–1077. [Google Scholar] [CrossRef]
- Goli, M.; Eskandarian, A. Merging strategies, trajectory planning and controls for platoon of connected, and autonomous vehicles. Int. J. Intell. Transp. Syst. Res. 2020, 18, 153–173. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Drone delivery: Urban airspace traffic density estimation. In Proceedings of the SESAR Innovation Days, Salzburg, Austria, 3–6 December 2018. [Google Scholar]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility–Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Thipphavong, D.P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.H.; Homola, J.; et al. Urban air mobility airspace integration concepts and considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3676. [Google Scholar]
- Sunil, E. Analyzing and Modeling Capacity for Decentralized Air Traffic Control. Ph.D Thesis, TU Delft, Delft, The Netherlands, 2019. [Google Scholar] [CrossRef]
- Slinn, M.; Matthews, P.; Guest, P. Traffic Engineering Design: Principles and Practice; Butterworth-Heinemann: Oxford, UK, 2005; pp. 76–163. [Google Scholar] [CrossRef]
- Kutz, M. Handbook of Transportation Engineering; McGraw-Hill: New York, NY, USA, 2013; Volume 42, p. 363. [Google Scholar] [CrossRef]
- Gayah, V.V.; Daganzo, C.F. Analytical Capacity Comparison of One-Way and Two-Way Signalized Street Networks. Transp. Res. Rec. J. Transp. Res. Board 2012, 2301, 76–85. [Google Scholar] [CrossRef]
- Ortigosa, J.; Gayah, V.V.; Menendez, M. Transportmetrica B: Transport Dynamics Analysis of one-way and two-way street configurations on urban grid networks ABSTRACT. Transp. B Transp. Dyn. 2019, 7, 61–81. [Google Scholar] [CrossRef] [Green Version]
- Stemley, J.J. One-way streets provide superior safety and convenience. ITE J. 1998, 68, 47–50. [Google Scholar]
- Boeing, G. Urban spatial order: Street network orientation, configuration, and entropy. Appl. Netw. Sci. 2019, 4, 67. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Member, S.; Liao, X. Recent Research Progress of Unmanned Aerial Vehicle Regulation Policies and Technologies in Urban Low Altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Nepusz, T.; Eiben, A.E.; Vicsek, T. Optimized flocking of autonomous drones in confined environments. Sci. Robot. 2018, 3, eaat3536. [Google Scholar] [CrossRef] [Green Version]
- Hoekstra, J.M.; Ellerbroek, J. Aerial Robotics: State-based Conflict Detection and Resolution (Detect and Avoid) in High Traffic Densities and Complexities. Curr. Robot. Rep. 2021, 2, 297–307. [Google Scholar] [CrossRef]
- Tielrooij, M.; Veld, A.C.I.T.; Van Paassen, M.M.; Mulder, M. Development of a Time-Space Diagram to Assist Air Traffic Controllers in Monitoring Continuous Descent Approaches. In Air Traffic Control; IntechOpen: London, UK, 2010. [Google Scholar]
- Klomp, R.; Riegman, R.; Borst, C.; Mulder, M.; Van Paassen, M. Solution space concept: Human-machine interface for 4D trajectory management. In Proceedings of the Thirteenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2019), Vienna, Austria, 17–21 June 2019; No. 58. pp. 17–21. [Google Scholar]
- Anwar, A.; Zeng, W.; Arisona, S.M. Time–Space Diagram Revisited. Transp. Res. Rec. 2014, 2442, 1–7. [Google Scholar] [CrossRef] [Green Version]
- De Leege, A.; Paassen, M.v.; Veld, A.i.; Mulder, M. Time–Space Diagram as Controller Support Tool for Closed-Path Continuous-Descent Operations. J. Aircr. 2013, 50, 1394–1408. [Google Scholar] [CrossRef] [Green Version]
- Drew, D.R.; LaMotte, L.R.; Buhr, J.; Wattleworth, J. Gap acceptance in the freeway merging process. Highw. Res. Rec. 1967, 208, 1–36. [Google Scholar]
- Schwarting, W.; Pierson, A.; Alonso-Mora, J.; Karaman, S.; Rus, D. Social behavior for autonomous vehicles. Proc. Natl. Acad. Sci. USA 2019, 116, 24972–24978. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hoekstra, J.; Ellerbroek, J. BlueSky ATC Simulator Project: An Open Data and Open Source Approach. In Proceedings of the Seventh International Conference for Research on Air Transport (ICRAT), Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- BlueSky. TUDelft-CNS-ATM/BlueSky. 2020. Available online: https://github.com/TUDelft-CNS-ATM/bluesky (accessed on 10 November 2021).
- Krader, K. Uber wants your next big mac to be delivered by drone. Bloomberg Businessweek, 12 June 2019. [Google Scholar]
- Hampson, M. Drone delivers human kidney: The organ was flown several kilometers by a drone without incurring damage-[News]. IEEE Spectr. 2018, 56, 7–9. [Google Scholar] [CrossRef]
- Ding, Y. E-Commerce Giant JD.com’s New Delivery Drone Takes Flight. 2021. Available online: https://www.caixinglobal.com/2020-12-25/e-commerce-giant-jdcoms-new-delivery-drone-takes-flight-101643197.html (accessed on 19 January 2021).
- Gudmundsson, A.; Mohajeri, N. Entropy and order in urban street networks. Sci. Rep. 2013, 3, 3324. [Google Scholar] [CrossRef] [Green Version]
- Boeing, G. Exploring Urban Form through OpenStreetMap Data: A Visual Introduction. In Urban Experience and Design: Comtemporary Perspectives on Improving the Public Realm; Routledge: New York, NY, USA, 2020; pp. 167–184. [Google Scholar]
- Rajendran, S.; Zack, J. Insights on strategic air taxi network infrastructure locations using an iterative constrained clustering approach. Transp. Res. Part E Logist. Transp. Rev. 2019, 128, 470–505. [Google Scholar] [CrossRef]
- Rajendran, S.; Shulman, J. Study of emerging air taxi network operation using discrete-event systems simulation approach. J. Air Transp. Manag. 2020, 87, 101857. [Google Scholar] [CrossRef]
- Alvarez, L.E.; Jones, J.C.; Bryan, A.; Weinert, A.J. Demand and Capacity Modeling for Advanced Air Mobility. In Proceedings of the AIAA AVIATION 2021 FORUM, Online, 2–6 August 2021; p. 2381. [Google Scholar]
- Barrington-Leigh, C.; Millard-Ball, A. A century of sprawl in the United States. Proc. Natl. Acad. Sci. USA 2015, 112, 8244–8249. [Google Scholar] [CrossRef] [Green Version]
- Barrington-Leigh, C.; Millard-Ball, A. More connected urban roads reduce US GHG emissions. Environ. Res. Lett. 2017, 12, 044008. [Google Scholar] [CrossRef]
- Barrington-Leigh, C.; Millard-Ball, A. Global trends toward urban street-network sprawl. Proc. Natl. Acad. Sci. USA 2020, 117, 1941–1950. [Google Scholar] [CrossRef] [Green Version]
- Haklay, M.; Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Boeing, G. Computers, Environment and Urban Systems OSMnx: New methods for acquiring, constructing, analyzing, and visualizing complex street networks. Comput. Environ. Urban Syst. 2017, 65, 126–139. [Google Scholar] [CrossRef] [Green Version]
- Hoekstra, J.M.; Van Gent, R.N.; Ruigrok, R.C. Designing for safety: The ’free flight’ air traffic management concept. Reliab. Eng. Syst. Saf. 2002, 75, 215–232. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. Review of conflict resolution methods for manned and unmanned aviation. Aerospace 2020, 7, 79. [Google Scholar] [CrossRef]
- Badea, C.A.; Veytia, A.M.; Ribeiro, M.; Doole, M.; Ellerbroek, J.; Hoekstra, J. Limitations of Conflict Prevention and Resolution in Constrained Very Low-Level Urban Airspace. In Proceedings of the 11th SESAR Innovation Days, Online, 7–9 December 2021. [Google Scholar]
- Bulusu, V. Urban air mobility: Deconstructing the next revolution in urban transportation—feasibility, capacity and productivity. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2019. [Google Scholar]
- Hagberg, A.; Schult, D.; Swart, P. Exploring network structure, dynamics, and function using NetworkX. In Proceedings of the 7th Python in Science Conference (SciPy2008), Pasadena, CA, USA, 19–24 August 2008; Volume 836, pp. 11–15. [Google Scholar]
- Matter, D.; Potgieter, L. Allocating epidemic response teams and vaccine deliveries by drone in generic network structures, according to expected prevented exposures. PLoS ONE 2021, 16, e0248053. [Google Scholar] [CrossRef]
- Krozel, J.; Peters, M.; Bilimoria, K.D.; Field, M.; Lee, C.; Mitchell, J.S.B. System Performance Characteristics of Centralized and Decentralized Air Traffic Separation Strategies. In Proceedings of the 4th USA/Europe Air Traffic Management R&D Seminar, Santa Fe, NM, USA, 3–7 December 2001; pp. 1–11. [Google Scholar]
- Jardin, M.R. Analytical Relationships Between Conflict Counts and Air-Traffic Density. J. Guid. Control. Dyn. 2005, 28, 1150–1156. [Google Scholar] [CrossRef]
- Shortle, J.; Belle, A. A methodology for estimating the probability of potential secondary conflicts. In Proceedings of the 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference (DASC), East Syracuse, NY, USA, 5–10 October 2013; p. 6C2-1. [Google Scholar]
- Parker, M., Jr.; Zegeer, C.V. Traffic Conflict Techniques for Safety and Operations: Observers Manual; Technical Report; Federal Highway Administration: Washington, DC, USA, 1989. [Google Scholar]
- Katamine, N. Nature and frequency of secondary conflicts at unsignalized intersections. J. Transp. Eng. 2000, 126, 129–133. [Google Scholar] [CrossRef]
- Flenniken, J.M.; Stuglik, S.; Iannone, B.V. Quantum GIS (QGIS): An introduction to a free alternative to more costly GIS platforms: FOR359/FR428, 2/2020. EDIS 2020, 2020, 7. [Google Scholar] [CrossRef]
- Xie, Z.; Yan, J. Kernel density estimation of traffic accidents in a network space. Comput. Environ. Urban Syst. 2008, 32, 396–406. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Guo, F.; Wang, F.Y. A survey of traffic data visualization. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2970–2984. [Google Scholar] [CrossRef]
- Barthélemy, M. Spatial networks. Phys. Rep. 2011, 499, 1–101. [Google Scholar] [CrossRef] [Green Version]
- Batty, M. The New Science of Cities; MIT Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Barthelemy, M. The Structure and Dynamics of Cities; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Kirkley, A.; Barbosa, H.; Barthelemy, M.; Ghoshal, G. From the betweenness centrality in street networks to structural invariants in random planar graphs. Nat. Commun. 2018, 9, 2501. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Kulik, L.; Ramamohanarao, K. Proactive traffic merging strategies for sensor-enabled cars. In Automotive Informatics and Communicative Systems: Principles in Vehicular Networks and Data Exchange; IGI Global: Hershey, PA, USA, 2009; pp. 180–199. [Google Scholar]
- Yang, H.; Ozbay, K. Estimation of Traffic Conflict Risk for Merging Vehicles on Highway Merge Section. Transp. Res. Rec. 2011, 2236, 58–65. [Google Scholar] [CrossRef]
- Neubert, L.; Santen, L.; Schadschneider, A.; Schreckenberg, M. Single-vehicle data of highway traffic: A statistical analysis. Phys. Rev. E 1999, 60, 6480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ayres, T.; Li, L.; Schleuning, D.; Young, D. Preferred time-headway of highway drivers. In Proceedings of the ITSC 2001, 2001 IEEE Intelligent Transportation Systems (Cat. No. 01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 826–829. [Google Scholar]
- Siebert, F.W.; Oehl, M.; Pfister, H.R. The influence of time headway on subjective driver states in adaptive cruise control. Transp. Res. Part F Traffic Psychol. Behav. 2014, 25, 65–73. [Google Scholar] [CrossRef] [Green Version]
- Milakis, D.; Van Arem, B.; Van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Chin, C.; Gopalakrishnan, K.; Balakrishnan, H.; Egorov, M.; Evans, A. Efficient and fair traffic flow management for on-demand air mobility. CEAS Aeronaut. J. 2021, 1–11. [Google Scholar] [CrossRef]
- Salazar, M.; Tsao, M.; Aguiar, I.; Schiffer, M.; Pavone, M. A congestion-aware routing scheme for autonomous mobility-on-demand systems. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3040–3046. [Google Scholar]
- Viana, M.P.; Strano, E.; Bordin, P.; Barthelemy, M. The simplicity of planar networks. Sci. Rep. 2013, 3, 3495. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | DJI Matrice 600 Pro |
|---|---|
| Speed [m/s] | 5–10.3 |
| Vertical speed [m/s] | −5–5 |
| Mass [kg] | 15 |
| Maximum bank angle [] | 35 |
| Acceleration/deceleration [m/s] | 3.5 |
| Low | Medium | High | |
|---|---|---|---|
| Traffic density (drones/km) | 31 | 46 | 61 |
| Inflow rate (drones/min) | 30 | 45 | 60 |
| Hourly demand (drones/h) | 1800 | 2700 | 3600 |
| Demand per depot (drones/depot) | 600 | 900 | 1200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doole, M.; Ellerbroek, J.; Hoekstra, J.M. Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace. Aerospace 2022, 9, 120. https://doi.org/10.3390/aerospace9030120
Doole M, Ellerbroek J, Hoekstra JM. Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace. Aerospace. 2022; 9(3):120. https://doi.org/10.3390/aerospace9030120
Chicago/Turabian StyleDoole, Malik, Joost Ellerbroek, and Jacco M. Hoekstra. 2022. "Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace" Aerospace 9, no. 3: 120. https://doi.org/10.3390/aerospace9030120
APA StyleDoole, M., Ellerbroek, J., & Hoekstra, J. M. (2022). Investigation of Merge Assist Policies to Improve Safety of Drone Traffic in a Constrained Urban Airspace. Aerospace, 9(3), 120. https://doi.org/10.3390/aerospace9030120