
Experimental Study of Measuring the Wrinkle of Solar Sails

Abstract
:1. Introduction
1.1. Application of Solar Sails in Aerospace
1.2. Wrinkling Analysis
2. Model and Method
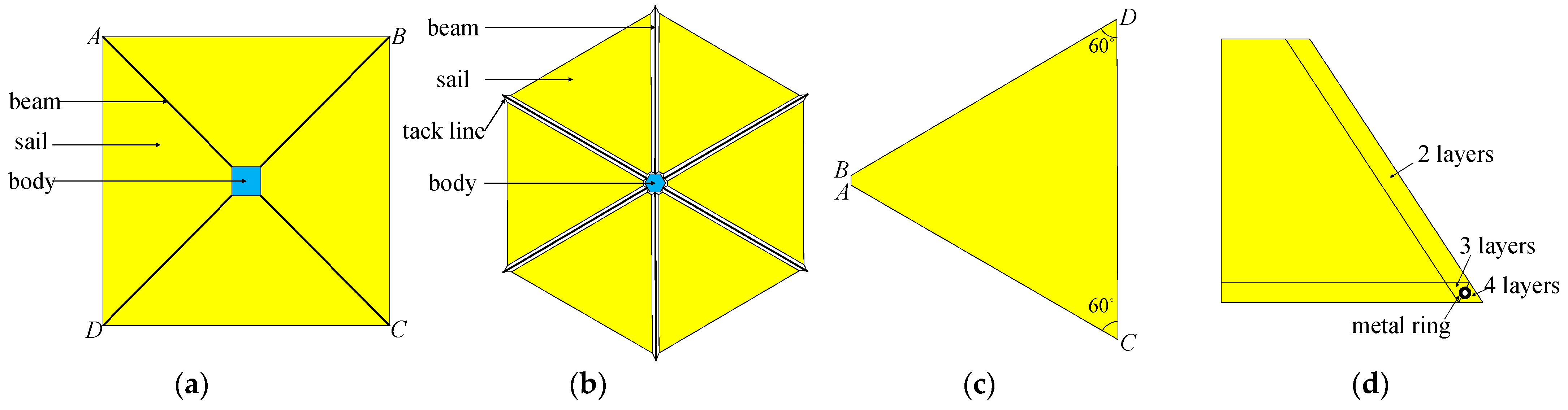
2.1. Solar Sail Model
2.2. Nonlinear Buckling Analysis Method
- Establish the finite element model. In the simulation analysis software, a shell element is usually applied to simulate the membrane element.
- Introduce the prestress. Although the shell element has a certain out-of-plane stiffness, due to small thickness of the membrane, the out-of-plane stiffness is very small, and so it is necessary to introduce the prestress to improve the out-of-plane stiffness to meet the requirements of the nonlinear buckling analysis.
- Introduce the initial imperfection. The purpose of introducing an initial imperfection is to solve the problem of the singularity of the stiffness matrix in post-buckling analysis. The generation and evolution of wrinkles can be simulated after introducing an initial imperfection. It is hard to get large-scale solar sails’ buckling modes, so we propose the direct perturbation method by applying a small force to the membrane to introduce the initial imperfection. In order to achieve a good convergence, the force should be as small as possible.
- The arc length method is adopted for the post-buckling analysis. When it does not converge, the load step parameters and the initial imperfection should be adjusted.
- Post-processing is applied to analyze the influence of the concentrated tensile force on the wrinkles.
3. Numerical Simulation
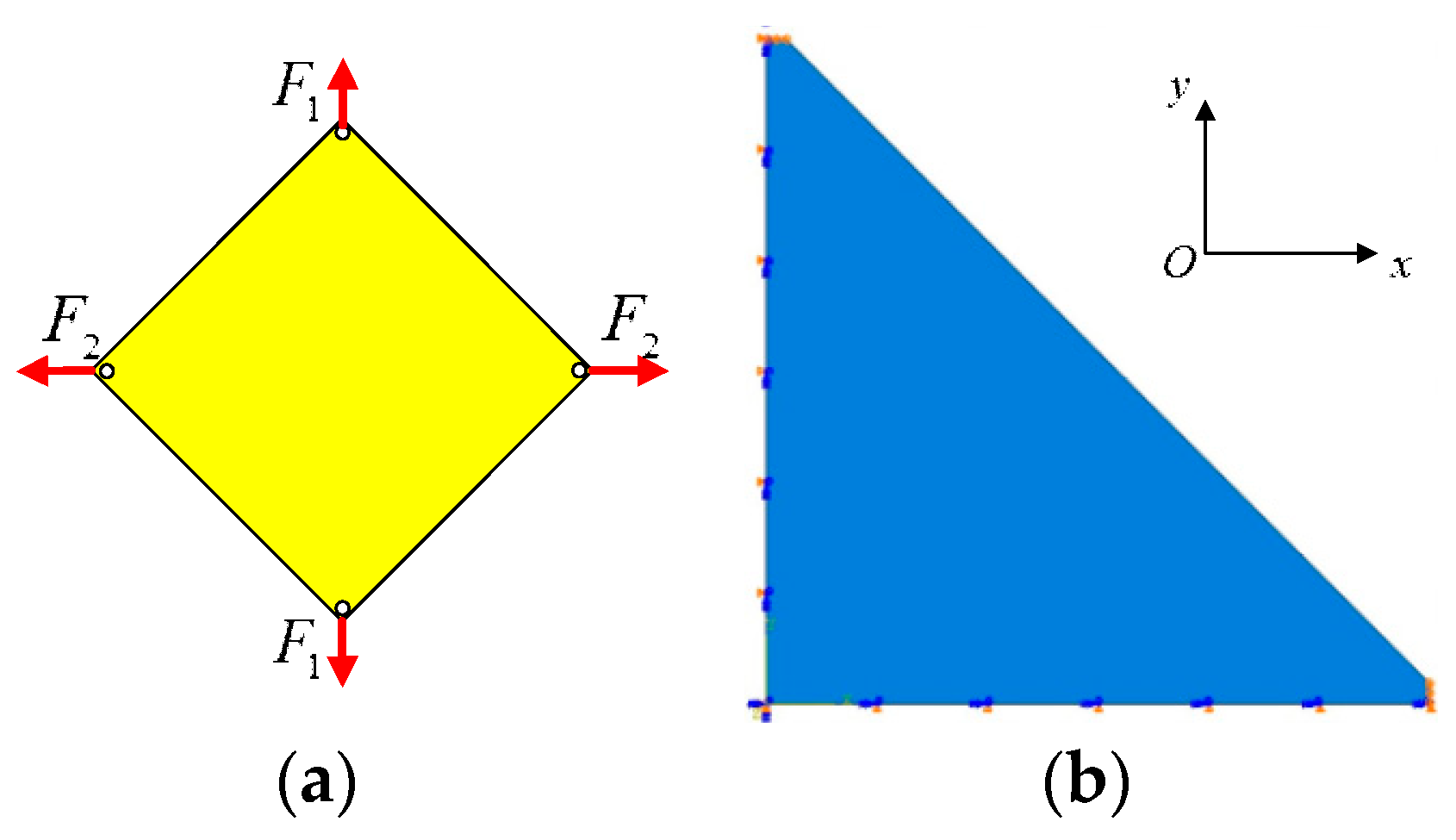
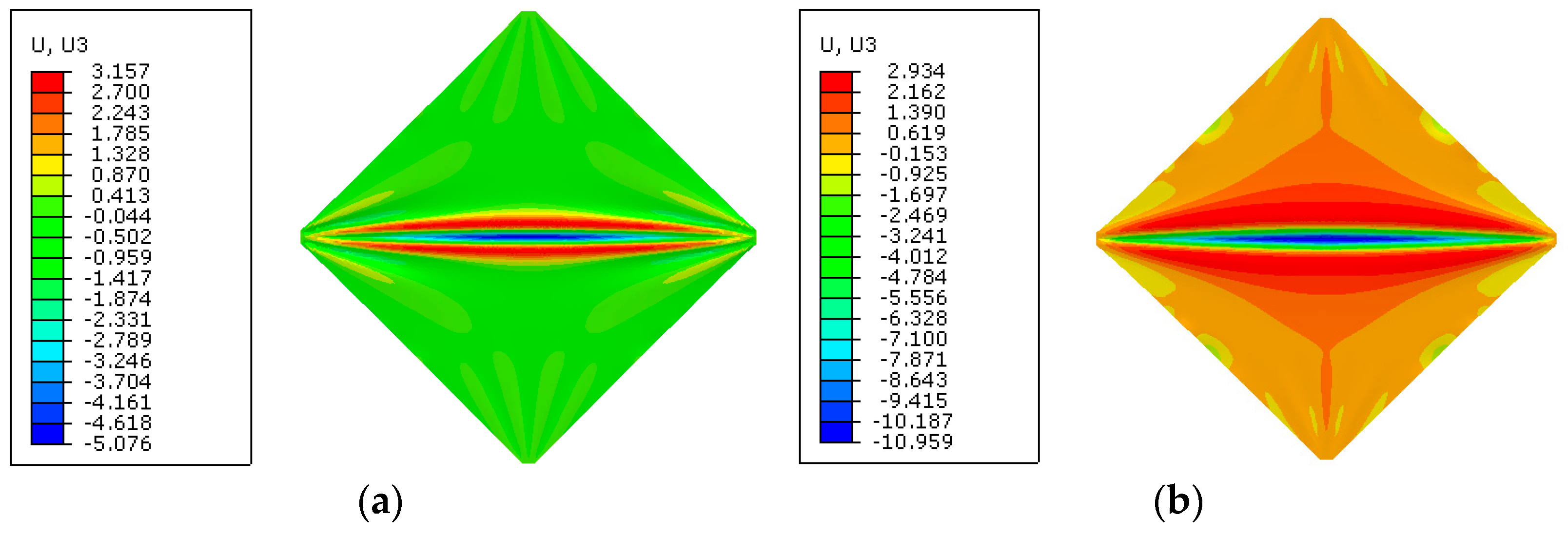
3.1. Square Membrane
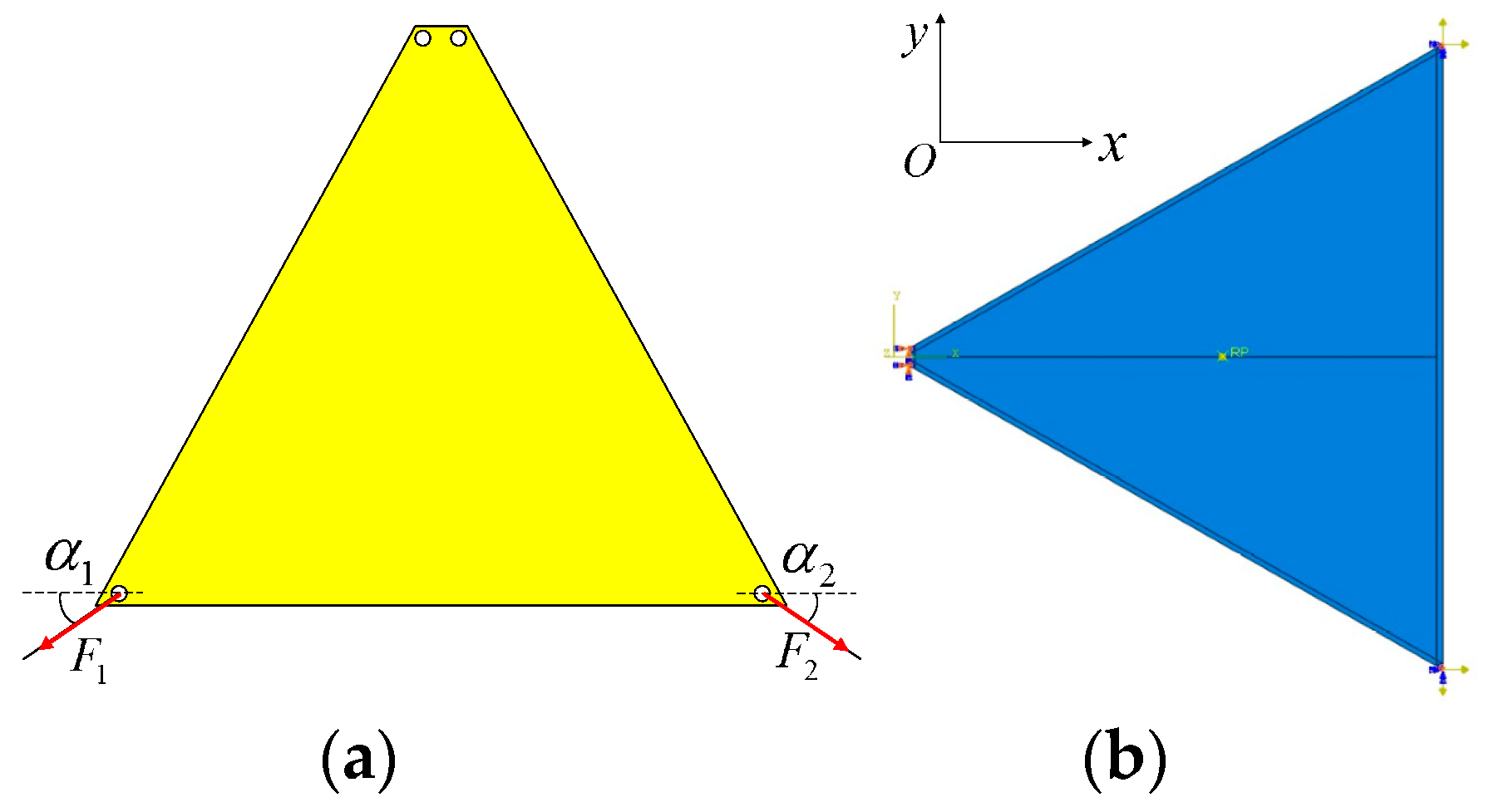
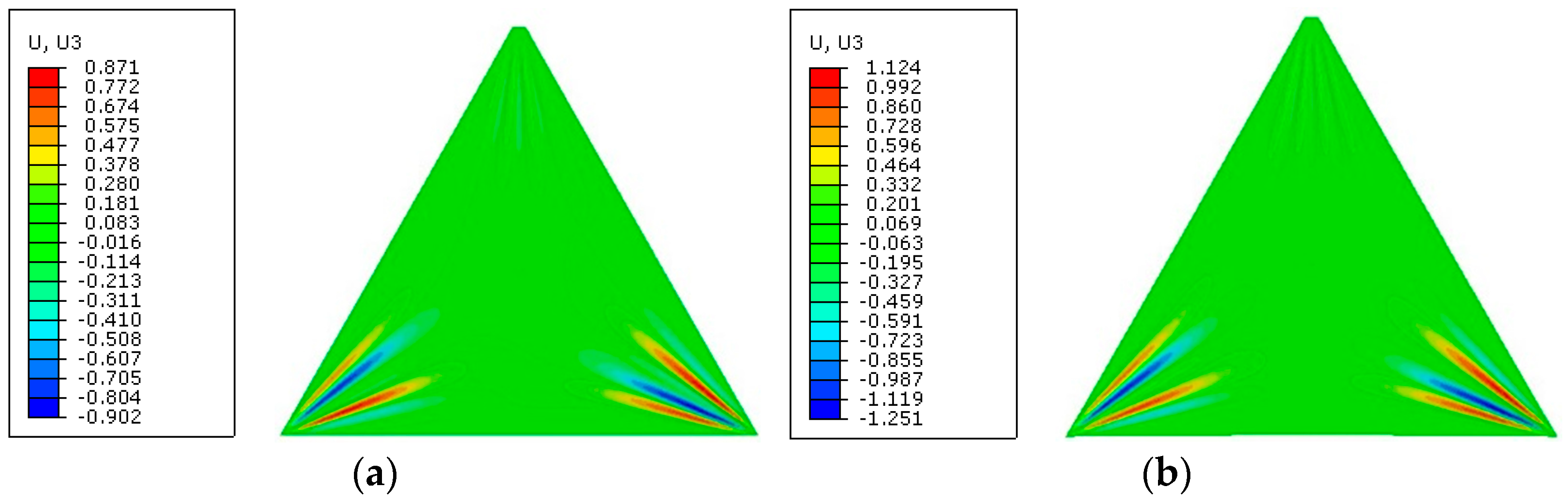
3.2. Trapezoidal Membrane
4. Experimental Result and Analysis
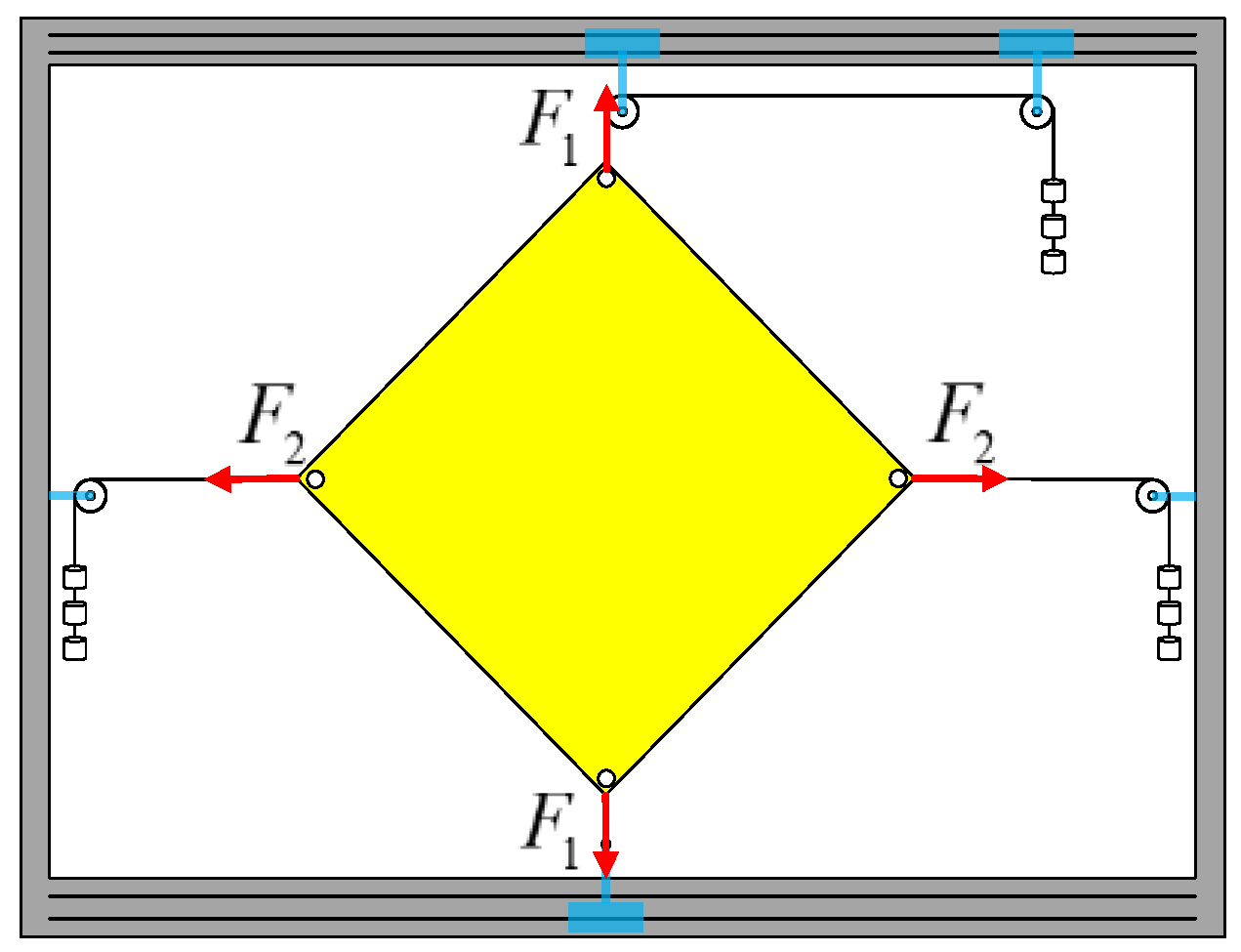
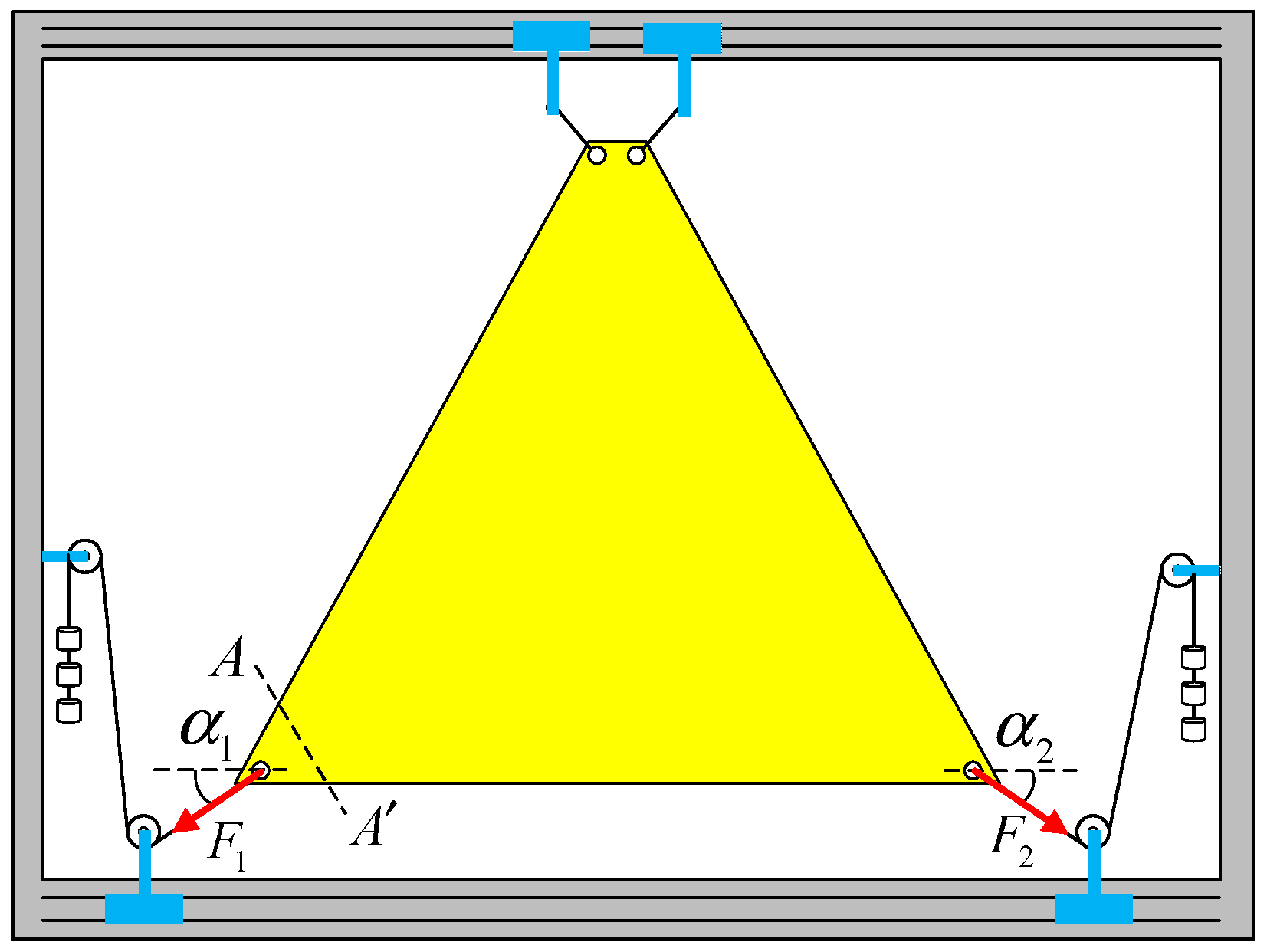
4.1. Design of the Experiment
- Make a membrane of corresponding size and spray the imaging agent on one side to increase the reflection rate;
- Install the membrane on the test piece system and adjust the weight or adjust the position of the pulley to make the value and direction of the force meet the requirements of the experimental working conditions;
- Use the CCD camera to take multiple photos of the experimental piece system from different angles;
- Import the photos into the image processing software to calibrate the coordinate system of the measurement system;
- Use the portable laser scanner to scan the membrane to obtain the scanning results;
- Repeat steps 2 to 5 until the measurements of all working conditions are completed.
4.2. Result and Analysis
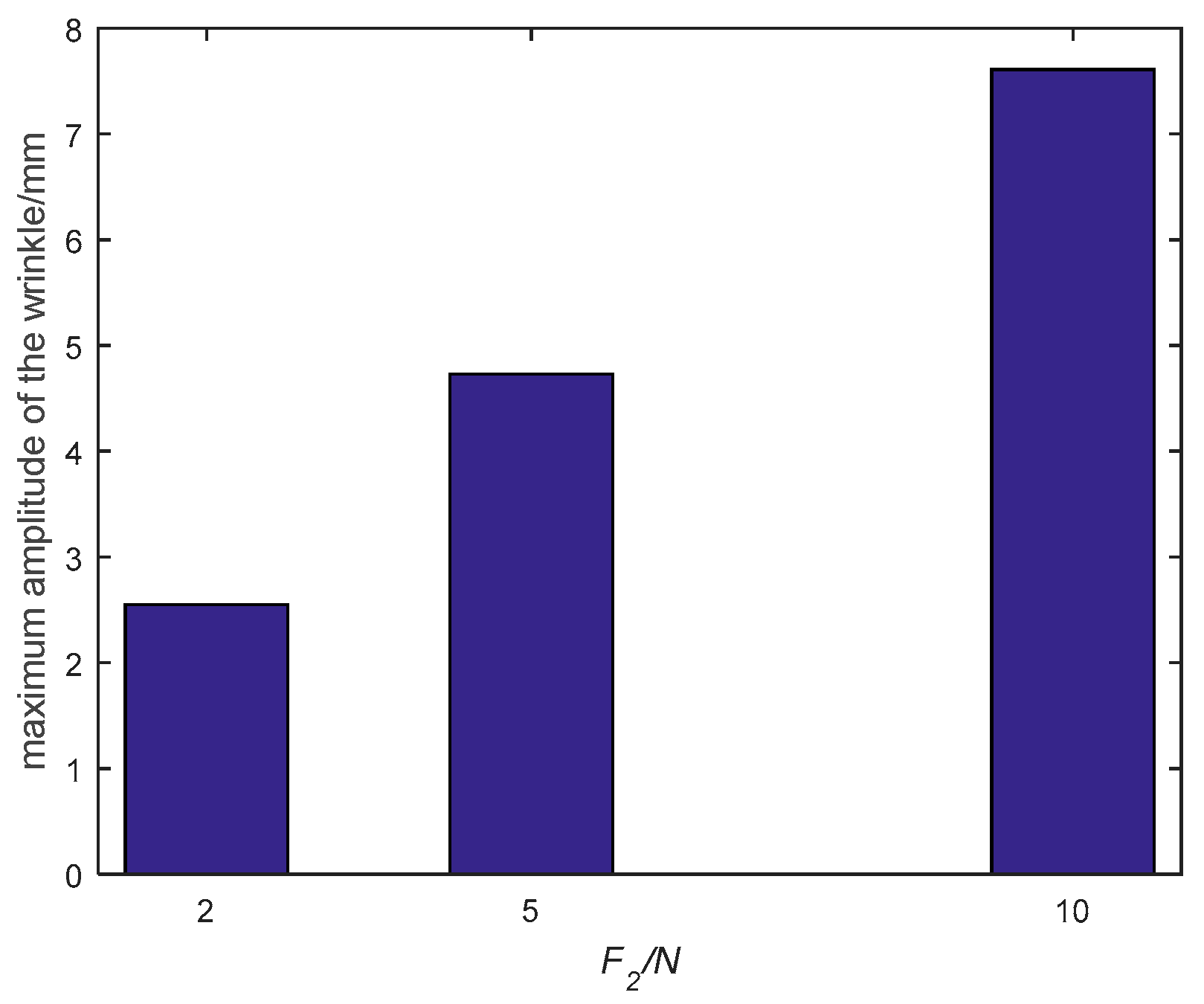
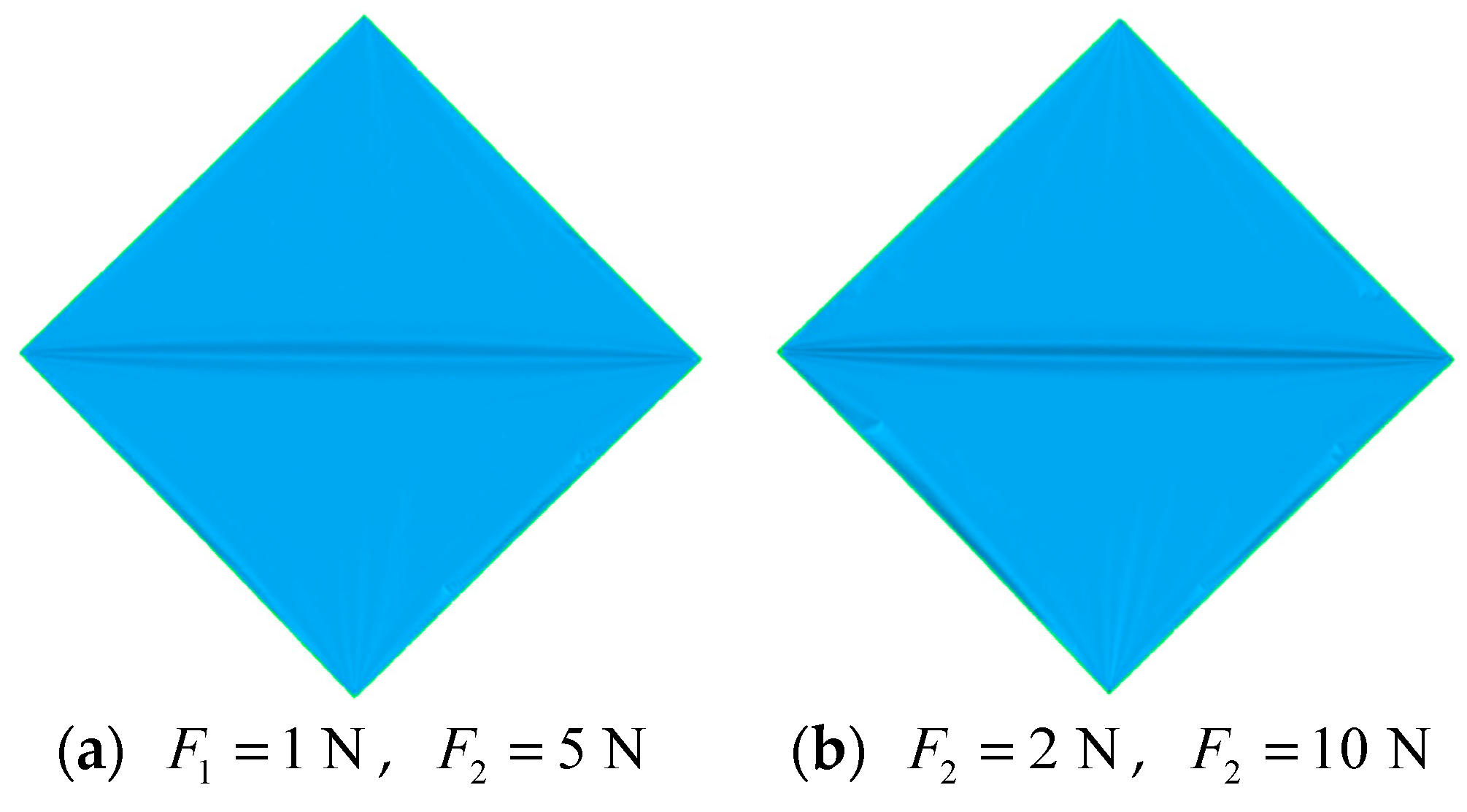
4.2.1. Square Membrane
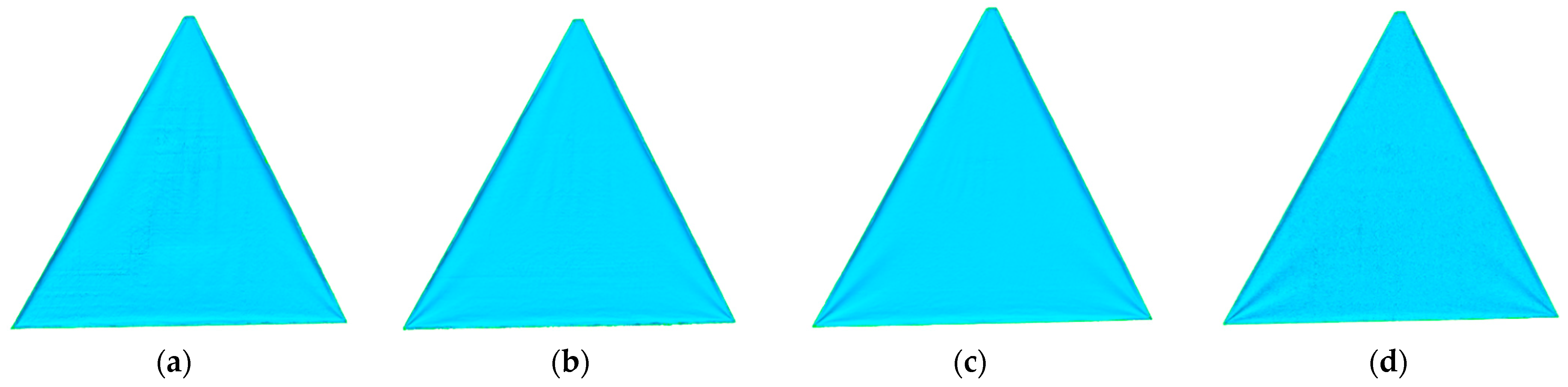
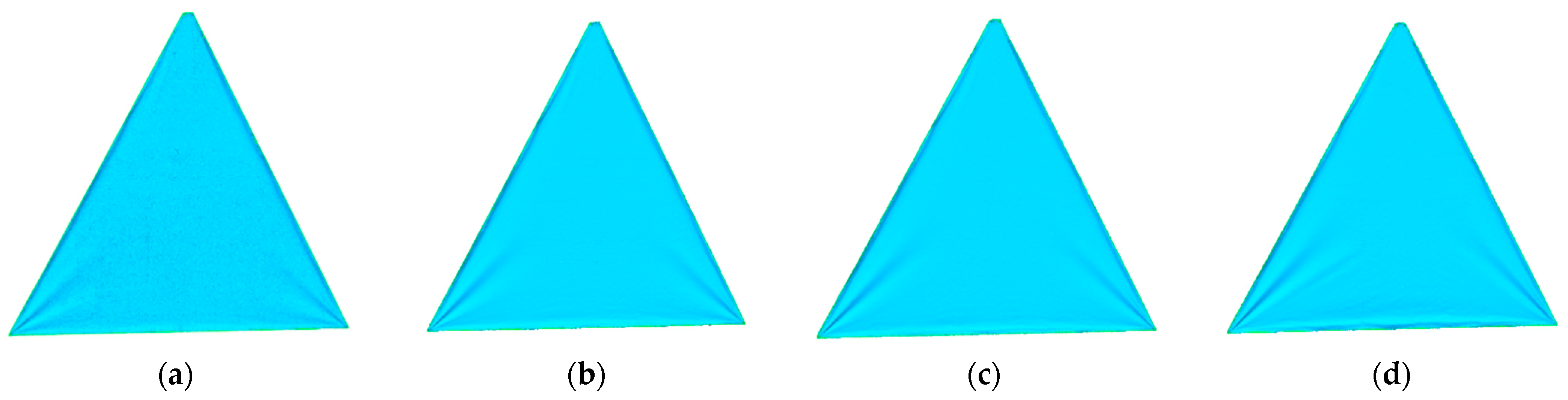
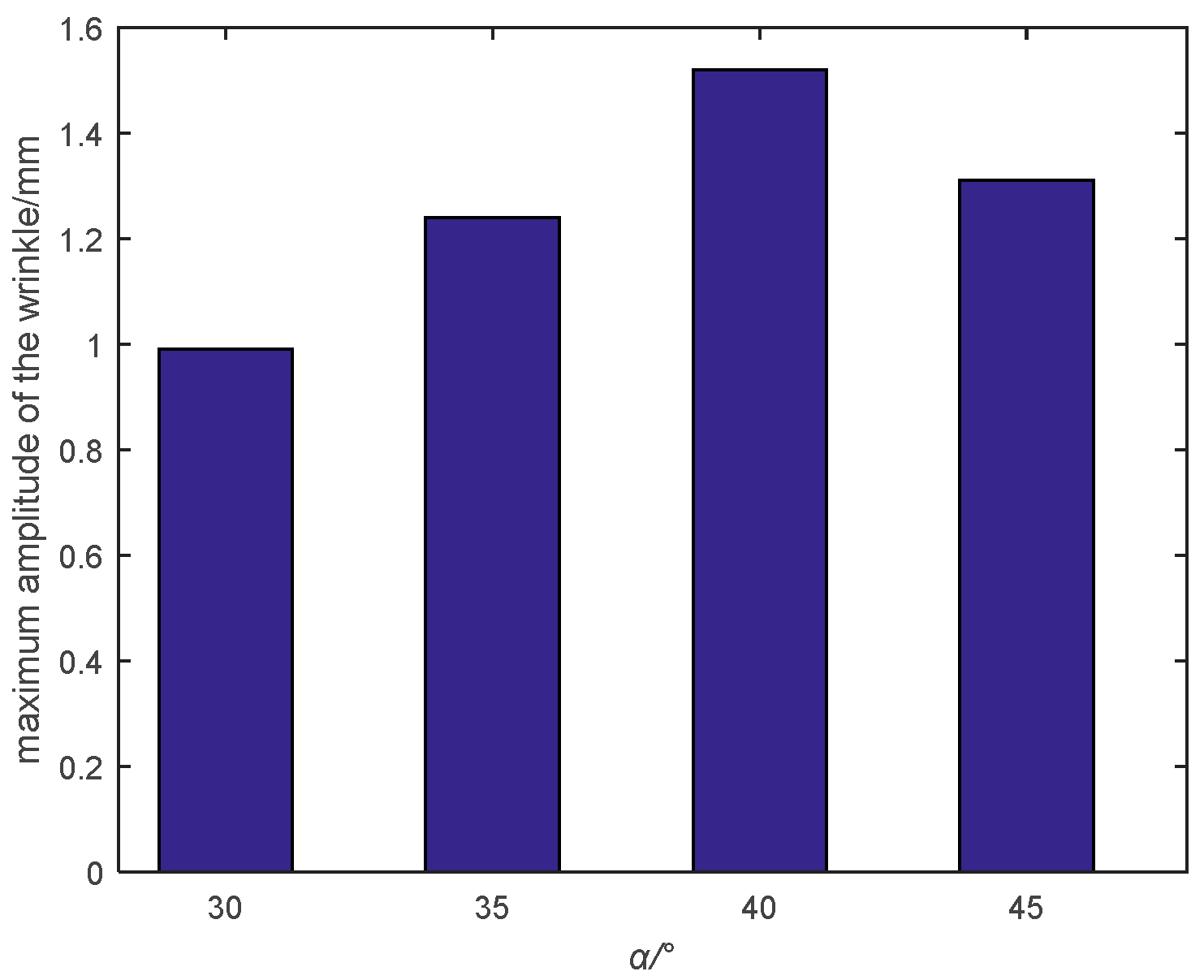
4.2.2. Trapezoidal Membrane
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Spencer, D.A.; Johnson, L.; Long, A.C. Solar sailing technology challenges. Aerosp. Sci. Technol. 2019, 93, 105276. [Google Scholar] [CrossRef]
- Tsuda, Y.; Mori, O.; Funase, R.; Sawada, H.; Yamamoto, T.; Saiki, T.; Endo, T.; Kawaguchi, J. Flight status of IKAROS deep space solar sail demonstrator. Acta Astronaut. 2011, 69, 833–840. [Google Scholar] [CrossRef]
- Johnson, L.; Whorton, M.; Heaton, A.; Pinson, R.; Laue, G.; Adams, C. NanoSail-D: A solar sail demonstration mission. Acta Astronaut. 2011, 68, 571–575. [Google Scholar] [CrossRef] [Green Version]
- Johnson, L.; Young, R.; Montgomery, E.; Alhorn, D. Status of solar sail technology within NASA. Adv. Space Res. 2011, 48, 1687–1694. [Google Scholar] [CrossRef] [Green Version]
- Spencer, D.A.; Betts, B.; Bellardo, J.M.; Diaz, A.; Plante, B.; Mansell, J.R. The LightSail 2 solar sailing technology demonstration. Adv. Space Res. 2021, 67, 2878–2889. [Google Scholar] [CrossRef]
- Underwood, A.V.C.; Schenk, M.; Fellowes, S.; Taylor, B.; Massimiani, C.; Duke, R.; Stewart, B.; Bridges, C.; Masutti, D.; Denis, A. The InflateSail CubeSat mission: The first European demonstration of drag-sail de-orbiting. In Proceedings of the 4th AIAA Conference on University Satellite Missions and CubeSat Workshop 2017, Rome, Italy, 4–7 December 2017. [Google Scholar]
- Viquerat, A.; Schenk, M.; Lappas, V.; Sanders, B. Functional and Qualification Testing of the InflateSail Technology Demonstrator. In Proceedings of the 2nd AIAA Spacecraft Structures Conference, American Institute of Aeronautics and Astronautics 2015, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Seefeldt, P. A stowing and deployment strategy for large membrane space systems on the example of Gossamer-1. Adv. Space Res. 2017, 60, 1345–1362. [Google Scholar] [CrossRef]
- Seefeldt, P.; Spietz, P.; Sproewitz, T.; Grundmann, J.T.; Hillebrandt, M.; Hobbie, C.; Ruffer, M.; Straubel, M.; Tóth, N.; Zander, M. Gossamer-1: Mission concept and technology for a controlled deployment of gossamer spacecraft. Adv. Space Res. 2017, 59, 434–456. [Google Scholar] [CrossRef] [Green Version]
- McNutt, L.; Johnson, L.; Kahn, P.; Castillo-Rogez, J.; Frick, A. Near-Earth Asteroid (NEA) Scout. In Proceedings of the AIAA SPACE 2014 Conference and Exposition, American Institute of Aeronautics and Astronautics 2014, San Diego, CA, USA, 4–7 August 2014. [Google Scholar]
- Matsushita, M.; Chujo, T.; Matsumoto, J.; Mori, O.; Yokota, R.; Toyota, H.; Satou, Y.; Okuizumi, N.; Kato, H.; Nakamura, T.; et al. Solar power sail membrane prototype for OKEANOS mission. Adv. Space Res. 2021, 67, 2899–2911. [Google Scholar] [CrossRef]
- Mengali, G.; Quarta, A.A. Rapid Solar Sail Rendezvous Missions to Asteroid 99942 Apophis. J. Spacecr. Rocket. 2009, 46, 134–140. [Google Scholar] [CrossRef]
- Bianchi, C.; Niccolai, L.; Mengali, G.; Quarta, A.A. Collinear artificial equilibrium point maintenance with a wrinkled solar sail. Aerosp. Sci. Technol. 2021, 119, 107150. [Google Scholar] [CrossRef]
- Wagner, H. Flat Sheet Metal Girders with Very Thin Metal Webs. Part I II III NACA Tech Memo. 1929, 20, 200–314. [Google Scholar]
- Friswell, M.I.; Garvey, S.D.; Penny, J.E.T. Model reduction using dynamic and iterated IRS techniques. J. Sound Vib. 1995, 186, 311–323. [Google Scholar] [CrossRef]
- Dyka, C.T.; Ingel, R.P.; Flippen, L.D. A new approach to dynamic condensation for FEM. Comput. Struct. 1996, 61, 763–773. [Google Scholar] [CrossRef]
- Wu, C.-H. Nonlinear Wrinkling of Nonlinear Membranes of Revolution. J. Appl. Mech. 1978, 45, 533–538. [Google Scholar] [CrossRef]
- Martins, A.D.; Silvestre, N.; Bebiano, R. A new modal theory for wrinkling analysis of stretched membranes. Int. J. Mech. Sci. 2020, 175, 105519. [Google Scholar] [CrossRef]
- Lecieux, Y.; Bouzidi, R. Experimental analysis on membrane wrinkling under biaxial load—Comparison with bifurcation analysis. Int. J. Solids Struct. 2010, 47, 2459–2475. [Google Scholar] [CrossRef] [Green Version]
- Vulpetti, G.; Apponi, D.; Zeng, X.; Circi, C. Wrinkling analysis of solar-photon sails. Adv. Space Res. 2021, 67, 2669–2687. [Google Scholar] [CrossRef]
- Wong, Y.W.; Pellegrino, S. Wrinkled membranes part I: Experiments. J. Mech. Mater. Struct. 2006, 1, 15–23. [Google Scholar] [CrossRef] [Green Version]
- Bernal, R.; Tassius, C.; Melo, F. Elastic response and wrinkling onset of curved elastic membranes subjected to indentation test. Eur. Phys. J. E 2011, 34, 13. [Google Scholar] [CrossRef] [Green Version]
- Murphy, D.M.; Macy, B.D. Demonstration of a 10-m Solar Sail System. In Proceedings of the 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference, Palm Springs, CA, USA, 19–22 April 2004. [Google Scholar]
- Deng, X.; Xu, Y.; Clarke, C. Wrinkling modelling of space membranes subject to solar radiation pressure. Compos. Part B Eng. 2019, 157, 266–275. [Google Scholar] [CrossRef]
- Pino, T.; Circi, C.; Vulpetti, G. Wrinkling analysis for small solar-photon sails: An experimental and analytic approach for trajectory design. Adv. Space Res. 2019, 63, 3675–3690. [Google Scholar] [CrossRef]
- Contri, B.A.S.P. A Geometrically Nonlinear Finite Element Analysis of Wrinkled Membrane Surfaces by a No-compression MaterialL Model. Commun. Appl. Numer. Methods 1988, 4, 5–15. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Elastic Modulus | Poisson’s Ratio | Density |
|---|---|---|---|
| polyimide | 5 Gpa | 0.37 | 1330 kg/m3 |
| Resolution | Spatial Measurement Accuracy | Deformation Measurement Accuracy | Field Angle |
|---|---|---|---|
| 16 m | 0.020 mm (≤4 m) | 0.01 mm | 84° |
| Measurement Rate | Single Scanning Area | Minimum Interval between Points | Accuracy |
|---|---|---|---|
| 480,000 points/s | 275 × 250 mm | 0.03 mm | 0.02 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, J.; Li, D.; Wang, J.; Yu, Y. Experimental Study of Measuring the Wrinkle of Solar Sails. Aerospace 2022, 9, 289. https://doi.org/10.3390/aerospace9060289
Zou J, Li D, Wang J, Yu Y. Experimental Study of Measuring the Wrinkle of Solar Sails. Aerospace. 2022; 9(6):289. https://doi.org/10.3390/aerospace9060289
Chicago/Turabian StyleZou, Jie, Dongxu Li, Jie Wang, and Ye Yu. 2022. "Experimental Study of Measuring the Wrinkle of Solar Sails" Aerospace 9, no. 6: 289. https://doi.org/10.3390/aerospace9060289
APA StyleZou, J., Li, D., Wang, J., & Yu, Y. (2022). Experimental Study of Measuring the Wrinkle of Solar Sails. Aerospace, 9(6), 289. https://doi.org/10.3390/aerospace9060289