2. Preliminaries
2.1. Cooperative Games
A cooperative game with transferable utility, referred to as a game from now on, is a pair where N is a finite set, the elements of which are called players, and a function , named characteristic function, which satisfies . The subsets of N, the elements in , are called coalitions. Given a coalition S, the worth is interpreted as the common payment that the players of S obtain if they cooperate. Frequently, a cooperative game is identified with the function v. The family of games with set of players N is denoted by . Let . A player is said to be null if for all coalitions . Two different players are called symmetric if for any coalition .
Family
is a real vectorial space with dimension
. Given a non-empty coalition
, the
unanimity game is defined by:
The set
is the basis of
; hence, each game
can be written as a linear combination of them:
The coordinates of the game
v with respect to the basis of the unanimity games are called the
Harsanyi dividends [
11] of
v. The Harsanyi dividends can be obtained recursively:
The dividend of a coalition S in the game v can be interpreted as the part of the worth obtained only from the formation of this coalition. For instance, suppose . We have then that , so , that is the part of the worth which is not obtained from the individual coalitions.
A cooperative game
is called
monotone if
implies
. Game
v is
positive if
for all coalition
S, and
v is
superadditive if it satisfies
for every
with
. If a game is superadditive and positive, then the game is monotone.
2.2. The Shapley Value
A value on
is a mapping
. For each
, the coordinate
represents the payoff of player
in that game. There are many values defined in the literature. The best-known and most widely used is the
Shapley value [
5]. The Shapley value assigns to each player
in a game
:
where
for every
. Another way to express the Shapley value is in terms of the Harsanyi dividends:
This formula allows us to explain the Shapley value in a nice sense. The Shapley value allocates the dividends of the coalitions among their players in an egalitarian way.
The Shapley value satisfies the following properties. Let :
Efficiency: ;
Additivity: for all ;
Equal treatment: if are symmetric in v then ;
Null player property: if is a null player in v, then . Moreover, null players are removable in the following sense: if is a null player, and is the restriction of the function v to , then for all ;
Monotonicity: if v is monotone, then for all .
Shapley [
5] proved that his value is the only one satisfying the efficiency, additivity, equal treatment and null player property.
2.3. Graph-Restricted Games and the Myerson Value
In order to model cooperative situations with communication restrictions, Myerson [
6] introduced
graph-restricted games. We hereafter denote by
N a fixed finite set. All the graphs considered in this paper will be undirected simple graphs. If
are two different nodes in
N, the link
will be denoted just by
, provided that it does not lead to confusion. A graph-restricted game
on
N consists of a game
and a graph
. In this model,
represents the communication possibilities between the players, in the sense that a coalition is feasible only if all its players are connected, according the graph, within the coalition. If
, then
. Remember that two vertices (players)
are connected in
if there is a list of players
with
,
and
for each
. Coalition
S is
connected in
if all pair of players
are connected in the graph
. The maximal connected coalitions are called
connected components in
. Myerson introduced a value for graph-restricted games. Given a graph-restricted game
, he defined
as:
for every
, where
is the set:
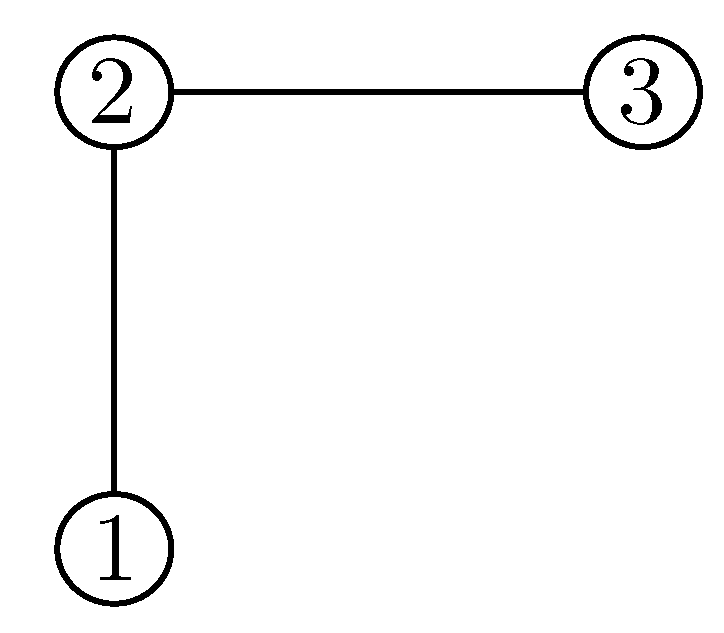
So, he considers the worth of a coalition as the sum of the payments of the maximal connected sets within the coalition, assuming that the connected sets by the graph are the only feasible coalitions. For example, consider the graph
in
Figure 1, with
and
, and any game
. Notice that
since
, but
because
.
Then, Myerson defines a value for graph-restricted games, known in the literature as
the Myerson value, given by:
Hence, the Myerson value is actually the Shapley value of a certain modification of the initial game. Myerson proves that Y is characterized by the following properties:
Component efficiency: for every graph-restricted game and every ;
Fairness: for every graph-restricted game and every . That is, both players in a link have the same profit decrease if we remove the link.
3. A Value for Graph-Restricted Games with Middlemen on Edges
In the graph-restricted games introduced by Myerson [
6], the existence of an edge
means that players
i and
j can cooperate freely, in the sense that there is a method of communication between
i and
j. It is assumed that there is no cost associated with the direct communication between
i and
j. Nevertheless, there are situations in which the direct communication between two players depends on an intermediary agent. This agent does not properly participate in the income-generating activity in which
i an
j are involved, but they are essential to facilitate the cooperation. In order to model a situation like that, we will consider a graph-restricted game with middlemen on edges, which consists of a graph
and a characteristic function
, which indicates the profit that can be obtained by each coalition of nodes if they are allowed to cooperate. The difference with the games introduced by Myerson is that, in our case, both nodes and edges represent agents, and consequently, each one of them should receive a fair payoff. Our goal is to define and characterize a reasonable allocation rule for graph-restricted games with middlemen on edges. A graph-restricted game (on
N) with middlemen on edges consists of a characteristic function
with
and a graph
. It will be denoted by
. So, a graph-restricted game with middlemen on edges is exactly the same mathematical structure as a graph-restricted game. The family of graph-restricted games (on
N) will be denoted by
. Our approach consists of introducing a new kind of solution.
Definition 1. A value for graph-restricted games on N with middlemen on the edges is a mapping Ψ that assigns to each a payoff vector .
Myerson [
6] considered a new game defined over the nodes (
5) and Meesen [
7] a new game over the links. We need to define a new game for both nodes and edges. In order to obtain a payoff vector for both elements for a game
, we can consider the restricted game
, where
is defined by:
for every
and every
, where
is the set of connected components in
. Following Myerson and Meesen, we define a value for graph-restricted games with middlemen on the edges by using
.
Definition 2. The Myerson value for graph-restricted games with middlemen on the edges is the value Φ
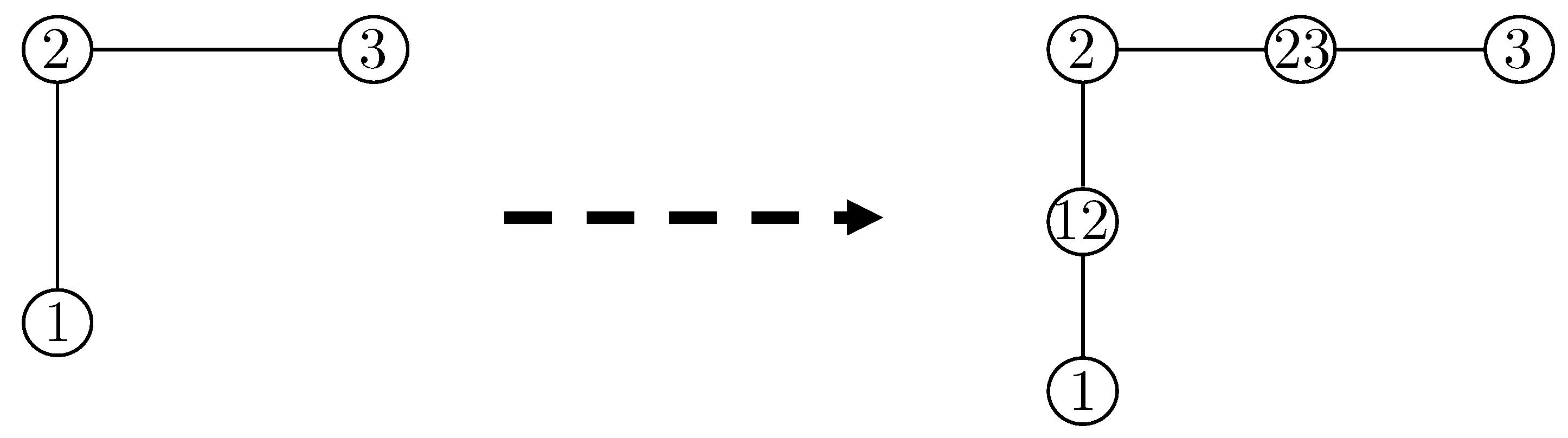
given by:for all . Obviously, this value is related to the original Myerson value. In fact, we can prove the following result that allows us to determine
through the Myerson value by changing the game and the graph (see
Figure 2).
Proposition 1. Letbe a graph-restricted game. The value Φ
for satisfies thatwhere: Proof. Consider
. Let
with
and
. For each
, we define:
We have that
because coalition
if and only if
T is connected in
and there is not
with
. Now we obtain:
If both games are the same, then:
□
Our goal in the rest of the paper will be to characterize . To this end, we will consider the following properties:
COMPONENT EFFICIENCY. A value
for graph-restricted games with middlemen on the edges satisfies component efficiency if:
for every
and every
.
The property of component efficiency establishes that if T is a connected component of the communication graph, then the players in T and the middlemen that communicate them allocate to themselves the profit that the players in T can generate when they cooperate.
FAIRNESS. A value
for graph-restricted games with middlemen on the edges satisfies fairness if:
for every
and every
.
The property of fairness asserts that if a middleman establishes a direct communication between two players, then all three of them will benefit equally.
The following theorems state that is characterized by the two properties above.
Theorem 1. The value Φ satisfies component efficiency and fairness.
Proof. We will show that satisfies the properties in the theorem using Proposition 1.
Component efficiency. Let
and let
. Obviously,
. As the Myerson value satisfies the component efficiency, then:
Fairness. Let
and let
. We consider the edge
, and we apply the fairness property to the Myerson value of
. The following relation is obtained:
From Proposition 1, we have that
and
. In addition, the definition of the Myerson value (
7) implies that
, where
.
First, we will prove that
e is a null player in
. Observe that
e, as a vertex in
, is only connected to
j. Let
with
and
. We intend to test that
In fact, if
, then
is a connected component in
, and since
, the equality is true. Suppose
; then, if
is the connected component containing
j in the graph without
e, then
is the connected component containing
j in the graph with
e. Obviously,
From the definition of game
, we have (
10) again. Since
e is a null player in
and the Shapley value satisfies the null player property (see
Section 2.2), then:
Moreover, as we said in
Section 2.2, null players are removable to calculate the Shapley value. So, for player
i, we can calculate:
thinking of the game without player
e as
. Consider, then,
with
and
. If we do not use
e, then we have:
Finally, putting (
9), (
11) and (
12) together:
□
Now we will prove that our value is determined by these properties, namely, the component efficiency and fairness.
Theorem 2. The value Φ is the only value for graph-restricted games on N with middlemen on the edges satisfying component efficiency and fairness.
Proof. Let
be a value that satisfies component efficiency and fairness. We aim to prove that:
for every
. We will prove the equality above by induction on
.
Base case. .
By the property of component efficiency, it is clear that
for every
.
Induction step.
Let
be such that
. In order to prove that
, we will show that for every
, the following equalities hold:
Take
. If
, then
, and by the property of component efficiency, (
13) holds. Suppose now that
. Let
with
. By the property of fairness, it is clear that
Moreover, by induction hypothesis, we have that
From (
15)–(18), we conclude that
Taking into account that
i and
j have been arbitrarily chosen in
T with the condition
and that
T is a connected component of
, it is clear that there exists
such that
Let
. By the property of fairness, we know that
Thus,
, where we have used (
19) and the induction hypothesis. Therefore, we have proven that
From (
19) and (
20) and the fact that
and
satisfy component efficiency, we can easily deduce that
, which leads to (
13) and (14).
□
Notice that the characterization that we have obtained for the value
is similar to that obtained by Myerson [
6] for the value
Y. Roughly speaking, we have adapted the properties of component efficiency and fairness to our framework. In his seminal paper, Myerson introduced a third interesting property of values for graph-restricted games, which is stability. In this context, stability means that if the underlying game (i.e., the game before considering communication restrictions) is superadditive, then any two players will always benefit from establishing a link between them. After proving that the value
Y is characterized by the properties of fairness and component efficiency, Myerson concludes his paper with the proof that
Y is stable. In order to maintain the parallelism between this paper and Myerson’s, we will prove that
is also stable.
Proposition 2. The value Φ
is stable, that is, if and v is superadditive, then:for every . Proof. Let
be such that
v is superadditive. Let
. We aim to prove that
. By the property of fairness, this is equivalent to
. We have that
Therefore, it suffices to prove that
for every
and every
. To this end, take
and
. We distinguish three cases:
- (i)
. In this case, it is evident that
. We have that
- (ii)
and they are connected in . In this case, it is easy to check that . This leads to .
- (iii)
and they are not connected in
. We can write
, where
,
and
. It is clear that
. We have that
which is non-negative by the superadditivity of
v. Hence,
.
□
The next property will be interesting in the following section.
Proposition 3. If satisfies that v is superadditive and positive, then it holds .
Proof. Let
be such that
v is superadditive and positive. We will prove that
is monotone. Let
and
. We will see that
In the proof of Proposition 2, we showed that if
v is superadditive, then
. Observe that if
, then there exists only one
with
. As we said in
Section 2.1, since
v is superadditive and positive, then
v is monotone. For each
we set:
Since the elements of
are disjoint and
v is superadditive and monotone, we obtain:
Hence, we obtain the following result:
It was said in
Section 2.2 that the Shapley value satisfies monotonicity. As
is monotone and
, then
. □
4. Example: A KRI for Internal Networks
In most cases, managers are not able to understand the technical mechanisms or evaluation or support that enables them to make decisions. For that, the risk map is a simplification of technical information, where the severity of vulnerabilities can be shown by colors [
12]. In this example, we obtain an index using cooperative game theory to analyze the vulnerabilities that the custody of information may suffer when it is shared by different users through a network. We consider an internal network of computers connected according to the topology represented in a graph
. We assume that the information is stored in the computers (hosts) independently. The network has a system to know when there has been a theft or alteration of information, but it cannot determine exactly if the vulnerability comes from a host or from the communication. We use what was previously developed as a kind of risk indicator that establishes the probability of suffering a vulnerability in computers and/or communications, and in view of these probabilities, make a distribution of investment. Suppose a certain control point in the time of the network. Let
be a subset of computers. We can define a game
as follows:
Notice that the data in computers of
S can be stolen in the computers themselves or in the links between them. By construction game
v as positive and superadditive (also monotone), we propose the value
as the KRI for the network in that certain control point, which distributes the risk among the different elements of the networks (nodes and links). Actually, since there is component efficiency, we obtain a KRI in each connected component of the network. Proposition 2 guarantees that the index is non-negative. Fairness says that the risk in an edge is the difference between the risk of one of its vertices with the link in the structure and without it. Firstly, we propose to obtain a structural KRI for the network or any of its subnetworks induced by a subset of computers
by the value
, where
is the unanimity game defined in
Section 2.1. This initial index measures the structural risk of each element, i.e., the incidence of each of them (nodes and edges) in the theft of one datum from
T. Next, we propose to calculate a KRI at a time control point in the network using
and constructing
v as in (
21) with the information of the theft data at that moment.
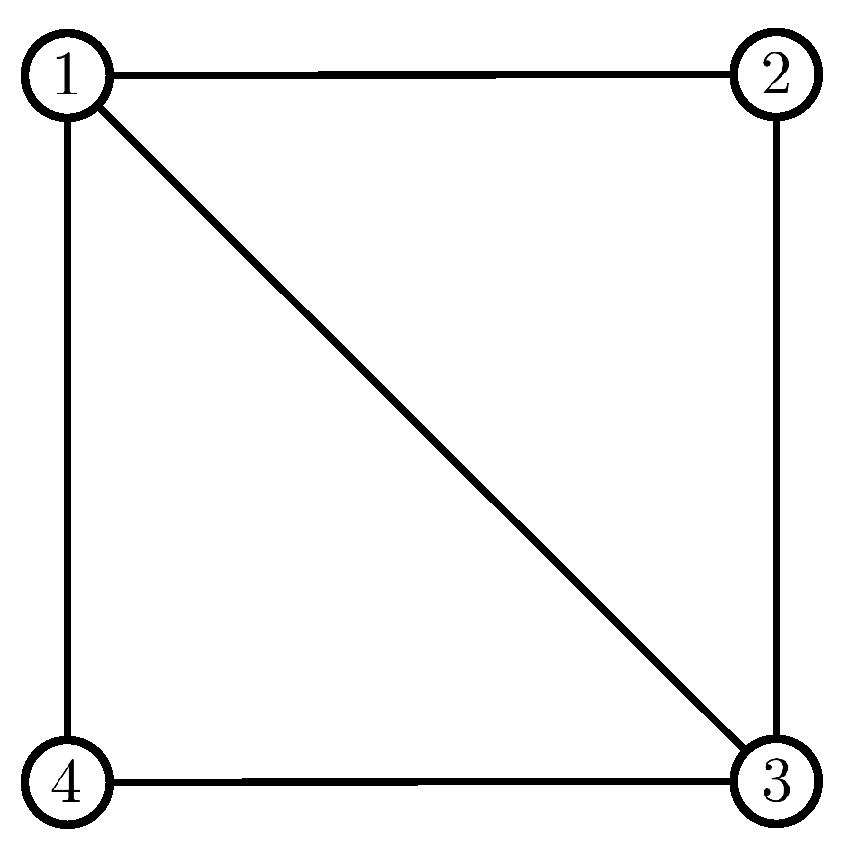
To demonstrate the idea, we take the network in
Figure 3 with
and
.
- (1)
Our goal is to calculate the structural KRI of the network, i.e., our goal is
. Recall that
. In order to determine
, we will apply (
4). Firstly, we calculate
for each
and each
. Then, we use (
2) to calculate the Harsanyi dividends of
.
Table 1 shows the results obtained.
Applying (
4), we obtain that
It is clear that the calculation of the payoffs to players
would be the same as above. Therefore:
Let us calculate now the payoff to 12. We have that
For middlemen
, we would obtain the same payoff as for 12. Hence:
Finally, let us calculate
:
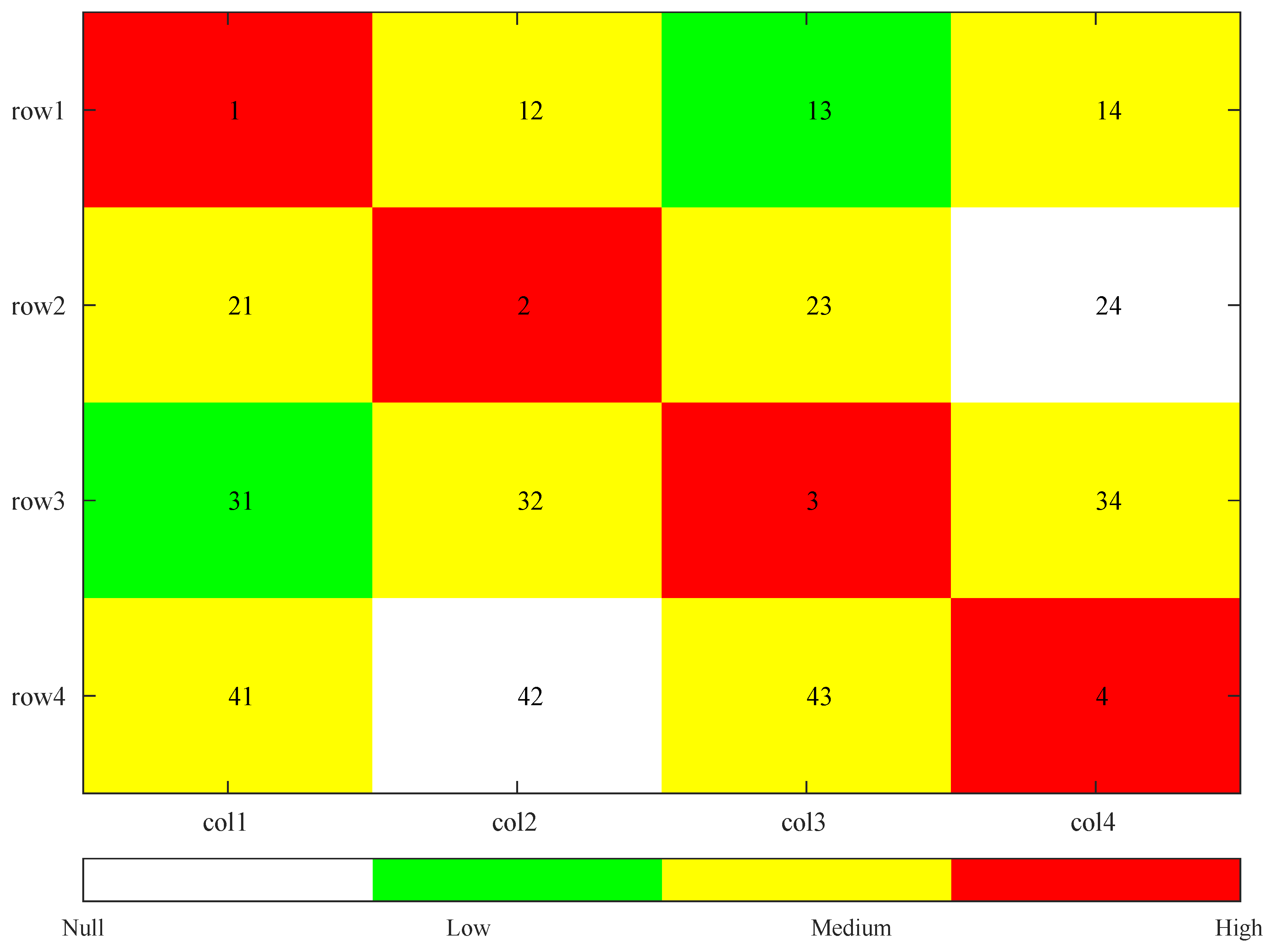
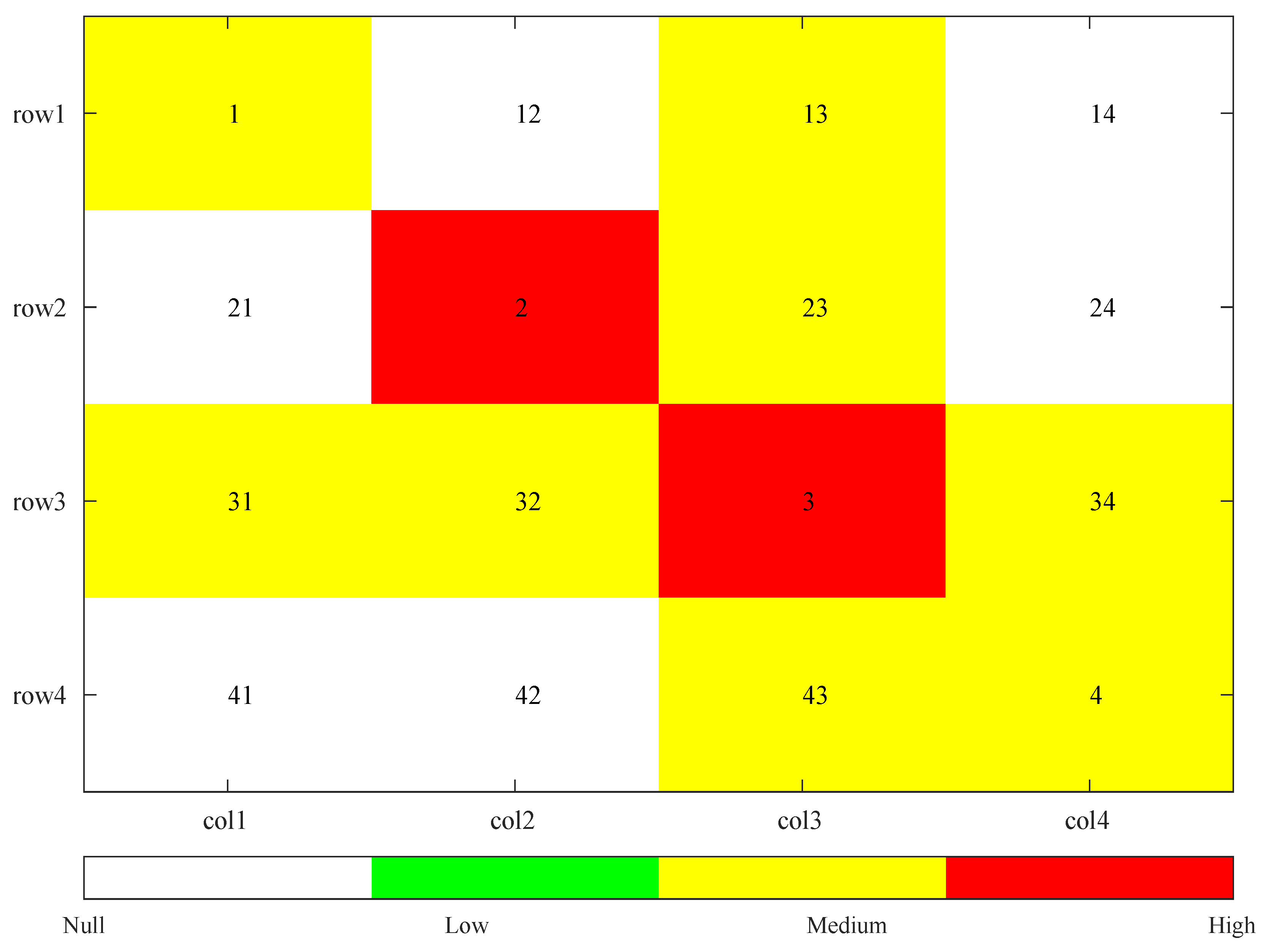
We present the solution as a risk matrix and later as a risk map. To do this, each host (computer)
i that acts as a node in the network will be in the main diagonal of the matrix (position
), while position
refers to the link (communication) between host
i and host
j. The matrix is symmetric since the link
is the same as the connection
(It is possible to extend the problem to directed networks). So, we obtain the structural KRI of the network:
We suppose a high level of risk if the index if greater than
, medium if it is the interval
and low if the index is less than
. The structural risk map of the network is in
Figure 4.
- (2)
Now we suppose that we test the system in a control, and we are aware that there is an amount of 100 stolen data. Those data are distributed among the following computers by
Table 2.
The KRI matrix, given by
, for this control point is:
The initial map informs us of the potential risk of each of the elements. We assume that, given these initial indices, an appropriately distributed security system is established for each of the elements. The checkpoint is made with knowledge of the data suspected of being stolen and the geographic location of where the data are located. The index calculated at the checkpoint allows the security system to be redistributed and adapted to more realistic risks. Thus, certain edges appear to have no risk, such as 12, and even certain computers have a minimal risk, such as 1, compared to the initial risk, which was high. The fact that the index is not only qualitative but quantitative allows us to use it also for the proportional distribution of work (inversely in this case, less work for computers with less weight) or new economic resources on security.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}