
An Output Feedback Controller for a Second-Order System Subject to Asymmetric Output Constraint Based on Lyapunov Function with Unlimited Domain




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- −
- Contribution Bi. The output feedback term of the control law, and consequently, the control law, take on large but finite and user-defined values when the tracking error values are equal to or higher than the prescribed constraint bound. In contrast, in BLF-based output constraint controllers (for instance [3,4,13]) the output feedback term, and consequently, the control law, give infinite values when the tracking error is equal to the constraint bound, and it is not defined for tracking error values higher than the constraint bound.
- −
- Contribution Bii. The output feedback term of the control law is equal to a user-defined output function when the tracking error is far from the constraint bound. This implies that high-performance output feedback functions, for instance, the well-known power-law functions, can be used in the controller for these tracking error values. In contrast, in BLF-based output constraint controllers (see [3,4,13]), previously known user-defined functions cannot be used in the output feedback term for tracking error values far from the constraint boundary.
- −
- Contribution Biii. The advantages of control design based on dead-zone Lyapunov functions are achieved, for instance, the absence of discontinuous signals in the controller whereas keeping robustness against disturbances or modeling error. In contrast, in BLF-based output constrain controllers (e.g., [4,13]), discontinuous signum type signals are used in the control law.
2. System Model, Reference Model and Control Goal
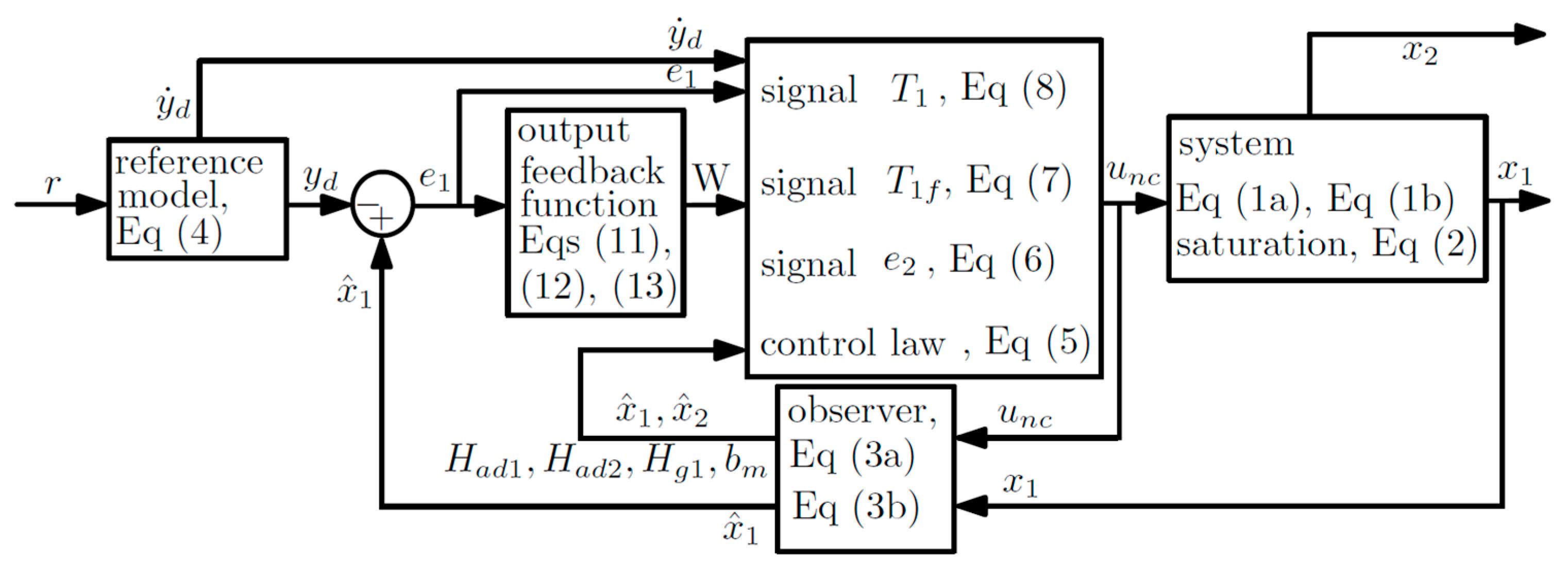
3. Control Algorithm, Controller Design and Stability Analysis
3.1. Control Algorithm
- −
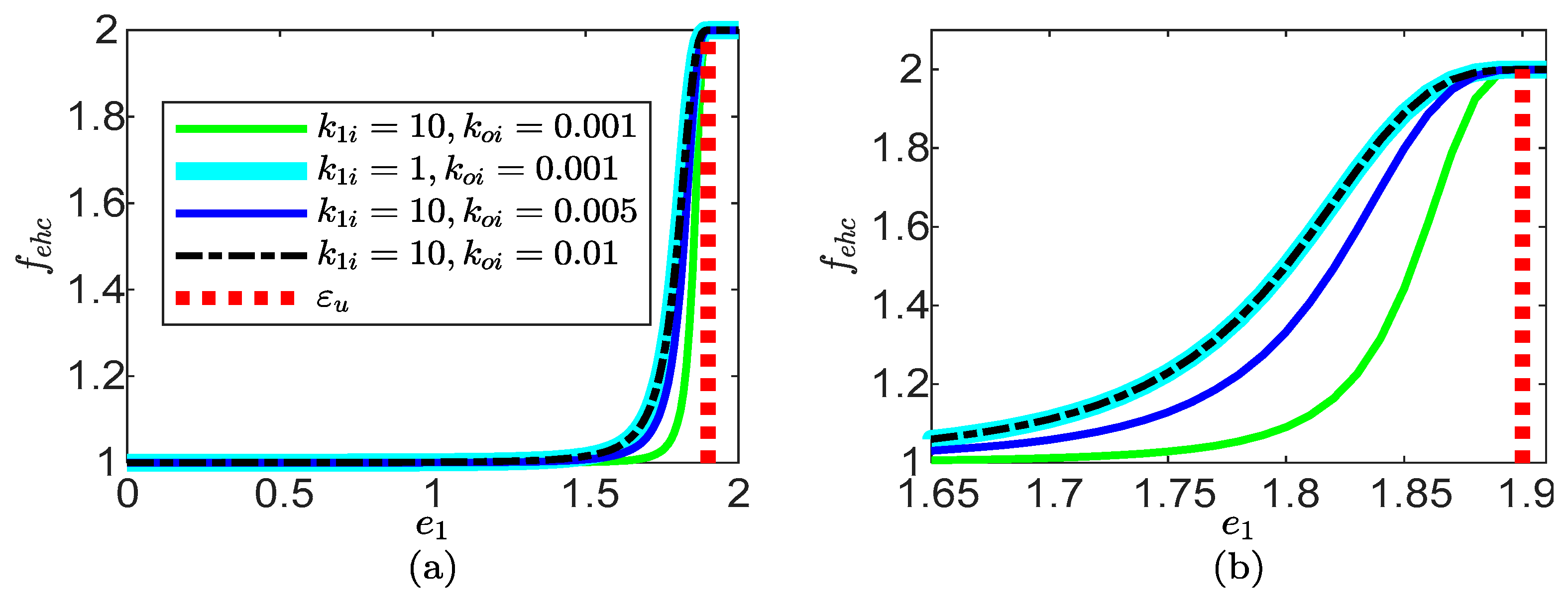
- Bi: it takes on large but bounded and user-defined values for tracking error close, equal, or higher than the prescribed constraint boundary. It is achieved by using the sigmoid function . This feature allows to achieve tracking error constraint.
- −
- Bii: it involves a previously known user-defined function for tracking error values far from the constraint bound, but it must satisfy conditions (13).
3.2. Controller Design and Stability Analysis
- it is continuous and increasing with respect to ;
- for values far from the bound, either or ;
- for values close to the bound ();
- for in case of upper bound , or in case of lower bound .
3.3. Discussion of Results
- −
- Bi: it takes on large but bounded and user-defined values for tracking error close, equal, or higher than the prescribed constraint bound, which is done through the sigmoid function . This function satisfies conditions (12), whereas its exact expression and the level of enhancement are user-defined. The tracking error constraint is achieved through this control effort enhancement.
- −
- Bii: it involves a previously known user-defined output feedback function for tracking error values far from the constraint bound. This function satisfies conditions (46), whereas its exact expression is user-defined so that high-performance functions are allowed, for instance the double power law (18).
4. Numerical Simulation
- −
- the developed controller achieves a fast asymptotic convergence of the tracking error to the compact set .
- −
5. Conclusions
- −
- The design is only valid for the second-order systems, so that systems of higher-order are not allowed.
- −
- Finite-time stabilization is not guaranteed. That is, the time for convergence of the tracking error to its compact set is not straightforwardly defined by the user. Indeed, some trial-and-error effort is needed for achieving a desired convergence time.
- −
- The control gain is considered completely known.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Mei, K.; Ding, S. Output-feedback finite-time stabilization of a class of constrained planar systems. Appl. Math. Comput. 2022, 412, 126573. [Google Scholar] [CrossRef]
- Ling, S.; Wang, H.; Liu, P.X. Adaptive tracking control of high-order nonlinear systems under asymmetric output constraint. Automatica 2020, 122, 109281. [Google Scholar] [CrossRef]
- Chen, C.-C.; Sun, Z.-Y. A unified approach to finite-time stabilization of high-order nonlinear systems with an asymmetric output constraint. Automatica 2020, 111, 108581. [Google Scholar] [CrossRef]
- Liu, L.; Ding, S. A unified control approach to finite-time stabilization of SOSM dynamics subject to an output constraint. Appl. Math. Comput. 2021, 394, 125752. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Ding, S.; Park, J.H.; Chen, C.-C. Second-order sliding mode controller design with output constraint. Automatica 2020, 112, 108704. [Google Scholar] [CrossRef]
- Wang, L.; Mei, K.; Ding, S. Fixed-time SOSM controller design subject to an asymmetric output constraint. J. Frankl. Inst. 2021, 358, 7485–7506. [Google Scholar] [CrossRef]
- Liu, Y.-J.; Lu, S.; Tong, S.; Chen, X.; Chen, C.L.P.; Li, D.-J. Adaptive control-based Barrier Lyapunov Functions for a class of stochastic nonlinear systems with full state constraints. Automatica 2018, 87, 83–93. [Google Scholar] [CrossRef]
- Sun, Z.-Y.; Zhou, C.-Q.; Chen, C.-C.; Meng, Q. Fast finite-time adaptive stabilization of high-order uncertain nonlinear systems with output constraint and zero dynamics. Inf. Sci. 2020, 514, 571–586. [Google Scholar] [CrossRef]
- Wang, M.; Chai, Y.; Luo, J. A Novel Prescribed Performance Controller with Unknown Dead-Zone and Impactive Disturbance. IEEE Access 2020, 8, 17160–17169. [Google Scholar] [CrossRef]
- Spiller, M.; Söffker, D. Output constrained sliding mode control: A variable gain approach. IFAC Pap. 2020, 53, 6201–6206. [Google Scholar] [CrossRef]
- Kang, Z.; Yu, H.; Li, C. Variable-parameter double-power reaching law sliding mode control method. Automatika 2020, 61, 345–351. [Google Scholar] [CrossRef]
- Liu, L.; Ding, S.; Yu, X. Second-Order Sliding Mode Control Design Subject to an Asymmetric Output Constraint. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 1278–1282. [Google Scholar] [CrossRef]
- Miranda-Colorado, R. Finite-time sliding mode controller for perturbed second-order systems. ISA Trans. 2019, 95, 82–92. [Google Scholar] [CrossRef] [PubMed]
- Askari, M.R.; Shahrokhi, M.; Khajeh Talkhoncheh, M. Observer-based adaptive fuzzy controller for nonlinear systems with unknown control directions and input saturation. Fuzzy Sets Syst. 2017, 314, 24–45. [Google Scholar] [CrossRef]
- Sinha, A.; Mishra, R.K. Control of a nonlinear continuous stirred tank reactor via event triggered sliding modes. Chem. Eng. Sci. 2018, 187, 52–59. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Yi, W. Fuzzy Observer-Based Dynamic Surface Control for Input-Saturated Nonlinear Systems and its Application to Missile Guidance. IEEE Access 2020, 8, 121285–121298. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Ma, Q.; Zhang, B.; Zhang, Z. Composite-Observer-Based Output-Feedback Control for Nonlinear Time-Delay Systems with Input Saturation and Its Application. IEEE Trans. Ind. Electron. 2018, 65, 5856–5863. [Google Scholar] [CrossRef]
- Meng, R.; Chen, S.; Hua, C.; Qian, J.; Sun, J. Disturbance observer-based output feedback control for uncertain QUAVs with input saturation. Neurocomputing 2020, 413, 96–106. [Google Scholar] [CrossRef]
- Picó, J.; de Battista, H.; Garelli, F. Smooth sliding-mode observers for specific growth rate and substrate from biomass measurement. J. Process Control. 2009, 19, 1314–1323. [Google Scholar] [CrossRef]
- Rincón, A.; Hoyos, F.E.; Restrepo, G.M. Design and Evaluation of a Robust Observer Using Dead-Zone Lyapunov Functions—Application to Reaction Rate Estimation in Bioprocesses. Fermentation 2022, 8, 173. [Google Scholar] [CrossRef]
- Slotine, J.-J.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Astrom, K.J.; Wittenmark, B. Adaptive Control; Addison-Wesley Publishing Company: Reading, MA, USA, 1995. [Google Scholar]
- Jiang, D.; Yu, W.; Wang, J.; Zhao, Y.; Li, Y.; Lu, Y. A Speed Disturbance Control Method Based on Sliding Mode Control of Permanent Magnet Synchronous Linear Motor. IEEE Access 2019, 7, 82424–82433. [Google Scholar] [CrossRef]
- Ding, C.; Ma, L.; Ding, S. Second-order sliding mode controller design with mismatched term and time-varying output constraint. Appl. Math. Comput. 2021, 407, 126331. [Google Scholar] [CrossRef]
- Shao, X.; Wang, L.; Li, J.; Liu, J. High-order ESO based output feedback dynamic surface control for quadrotors under position constraints and uncertainties. Aerosp. Sci. Technol. 2019, 89, 288–298. [Google Scholar] [CrossRef]
- Wang, L.; Basin, M.V.; Li, H.; Lu, R. Observer-Based Composite Adaptive Fuzzy Control for Nonstrict-Feedback Systems with Actuator Failures. IEEE Trans. Fuzzy Syst. 2018, 26, 2336–2347. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Koo, K.-M. Stable adaptive fuzzy controller with time-varying dead-zone. Fuzzy Sets Syst. 2001, 121, 161–168. [Google Scholar] [CrossRef]
- Wang, X.-S.; Su, C.-Y.; Hong, H. Robust adaptive control of a class of nonlinear systems with unknown dead-zone. Automatica 2004, 40, 407–413. [Google Scholar] [CrossRef]
- Ranjbar, E.; Yaghubi, M.; Abolfazl Suratgar, A. Robust adaptive sliding mode control of a MEMS tunable capacitor based on dead-zone method. Automatika 2020, 61, 587–601. [Google Scholar] [CrossRef]
- Rincón, A.; Hoyos, F.E.; Candelo-Becerra, J.E. Adaptive Control for a Biological Process under Input Saturation and Unknown Control Gain via Dead Zone Lyapunov Functions. Appl. Sci. 2021, 11, 251. [Google Scholar] [CrossRef]
- Hong, Q.; Shi, Y.; Chen, Z. Dynamics Modeling and Tension Control of Composites Winding System Based on ASMC. IEEE Access 2020, 8, 102795–102810. [Google Scholar] [CrossRef]
- Rincón, A.; Restrepo, G.M.; Hoyos, F.E. A Robust Observer—Based Adaptive Control of Second—Order Systems with Input Saturation via Dead-Zone Lyapunov Functions. Computation 2021, 9, 82. [Google Scholar] [CrossRef]
- Rincón, A.; Restrepo, G.M.; Sánchez, Ó.J. An Improved Robust Adaptive Controller for a Fed-Batch Bioreactor with Input Saturation and Unknown Varying Control Gain via Dead-Zone Quadratic Forms. Computation 2021, 9, 100. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Z.; Lin, C.; Chen, J. Fixed-time synchronization for complex-valued BAM neural networks with time-varying delays via pinning control and adaptive pinning control. Chaos Solitons Fractals 2021, 153, 111583. [Google Scholar] [CrossRef]
- Xu, C.; Liu, Z.; Liao, M.; Yao, L. Theoretical analysis and computer simulations of a fractional order bank data model incorporating two unequal time delays. Expert Syst. Appl. 2022, 199, 116859. [Google Scholar] [CrossRef]
- Vargas, A.; Moreno, J.A.; Mendoza, I. Time-Optimal Output Feedback Controller for Toxic Wastewater Treatment in a Fed-batch Bioreactor. IFAC Proc. Vol. 2011, 44, 3812–3817. [Google Scholar] [CrossRef]
- Restrepo Fanco, G.M. Obtención y Evaluación de un Preparado Líquido Como Promotor del Crecimiento de Cultivos de Tomate (Solanum lycopersicum L.) Empleando la Bacteria Gluconacetobacter diazotrophicus. Ph.D. Thesis, Universidad de Caldas, Manizales, Colombia, 2014. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rincón, A.; Hoyos, F.E.; Candelo-Becerra, J.E. An Output Feedback Controller for a Second-Order System Subject to Asymmetric Output Constraint Based on Lyapunov Function with Unlimited Domain. Mathematics 2022, 10, 1855. https://doi.org/10.3390/math10111855
Rincón A, Hoyos FE, Candelo-Becerra JE. An Output Feedback Controller for a Second-Order System Subject to Asymmetric Output Constraint Based on Lyapunov Function with Unlimited Domain. Mathematics. 2022; 10(11):1855. https://doi.org/10.3390/math10111855
Chicago/Turabian StyleRincón, Alejandro, Fredy E. Hoyos, and John E. Candelo-Becerra. 2022. "An Output Feedback Controller for a Second-Order System Subject to Asymmetric Output Constraint Based on Lyapunov Function with Unlimited Domain" Mathematics 10, no. 11: 1855. https://doi.org/10.3390/math10111855
APA StyleRincón, A., Hoyos, F. E., & Candelo-Becerra, J. E. (2022). An Output Feedback Controller for a Second-Order System Subject to Asymmetric Output Constraint Based on Lyapunov Function with Unlimited Domain. Mathematics, 10(11), 1855. https://doi.org/10.3390/math10111855