Abstract
In this work, we consider bilevel problems: variational inequality problems over the set of solutions of the generalized mixed equilibrium problems. Two new inertial extragradient methods are proposed for solving these problems. Under appropriate conditions, we prove strong convergence theorems for the proposed methods by the regularization technique. Finally, some numerical examples are provided to show the efficiency of the proposed algorithms.
Keywords:
Hilbert space; strong convergence; monotone operator; regularization method; Tseng’s extragradient method MSC:
90C25; 47H05; 47J25; 65K15; 65K1
1. Introduction
Let be a Hilbert space with the inner product and the induced norm . Let be a closed, convex and nonempty subset of a real Hilbert space . Let be a nonlinear bifunction, be a nonlinear mapping, and be a proper convex lower semicontinuous function. The generalized mixed equilibrium problem (GMEP) is defined as:
(I) If , the GMEP (1) reduces to the mixed equilibrium problem (MEP):
The set of solutions of the MEP (2) is denoted by .
(II) If , the GMEP (1) becomes the generalized equilibrium problem (GEP):
The set of solutions of the GEP (3) is denoted by . Particularly, if in (3), the GEP reduces to the classical equilibrium problem which is to
The GMEP is a generalization of many mathematical models such as saddle point problems, variational inequality problems, fixed point problems, minimization problems, certain optimization problems, Nash equilibrium problems, and others, see [1,2,3,4,5] for examples. Many authors have studied and proposed several iterative algorithms for solving GMEPs and related optimization problems; see for instance [6,7,8].
(III) If for all and for all then the GMEP (1) reduces to the variational inequality problem (VIP):
which solution set is denoted by . The VIP was first introduced by Fichera [9] in 1963 as Signori’s contact problem. Later, it was studied by Stampacchia [10] for modeling problems arising from mechanics. This problem is also known to have numerous applications in diverse fields such as, engineering, physics, mathematical programming, economics, among others. It can be considered as a central problem in nonlinear analysis and optimization since the theory of variational inequalities provides a natural, convenient, and unified framework for many network equilibrium problems, minimization problems, systems of nonlinear equations, complementary problems, and others (see [11,12,13]). Hence, the theory has become an area of great interest to numerous researchers. As a result of this, there has been an increased interest in developing implementable and efficient methods for solving VIPs.
Many methods for solving the variational inequality (1) have been introduced and studied (see, for example, [14,15,16]). One of the popular methods is the extragradient method (EGM), which was proposed by Korpelevich [7] (and also independently Antipin [17]) for solving the saddle point problems. It was subsequently extended to the VIPs with monotone and Lipschitz continuous mappings in both Euclidean spaces and Hilbert spaces. More precisely, the EGM is described as follows:
where . Note that the EGM might require a prohibitive amount of computation time when the structure of the feasible set is complex. This can affect the efficiency of the used method. In an attempt to overcome this computational drawback, Tseng [18] introduced a new extragradient method (TEGM) which is stated as follows.
One of the novelties in the proposed TEGM is that it requires only one projection per iteration. It is worth pointing out that the TEGM needs to know the information or approximation of the Lipschitz constant of , which limits the applicability of the method. On the other hand, we note that under some appropriate settings, Equation (6) and Algorithm 1 converge to the solution of the variational inequality weakly. However, Bauschke and Combettes [19] remarked that strong convergence is more desirable than weak convergence in solving some optimization problems. In order to establish a strongly convergent Algorithm 2 which does not require prior knowledge of the Lipschitz constants of , Yang et al. [20] suggested a new self-adaptive Tseng’s extragradient method (STEM):
| Algorithm 1 Tseng’s extragradient method (TEGM). |
Initialization: Take and let be arbitrary. Step 1. Given , compute
Step 2. Calculate the next iterate
|
| Algorithm 2 Self-adaptive Tseng’s extragradient method (STEM). |
Initialization: Take , , and let be arbitrary. Step 1. Given , compute
and
If , then stop: is a solution. Otherwise, go to Step 2. Step 2. Compute
Step 3. Set and go to Step 1. |
Under mild conditions, they proved the strong convergence of the introduced method to an element of . The algorithm proposed in [20] applies a new step size criterion that automatically updates the iteration stepsize by a simple computation using some previously known information. However, this method generates a monotonically decreasing sequence of stepsize and might further affect the execution efficiency of such method.
Motivated by the ideas of the EGM, the TEGM, and the STEM, Tan and Qin [8] proposed a new inertial extragradient method with non-monotonic stepsizes (SVTE) for solving the VIPs as follows:
They proved strong convergence of Algorithm 3 to an element of under appropriate conditions.
| Algorithm 3 Self adaptive viscosity-type inertial Tseng’s extragradient algorithm (SVTE). |
Initialization: Take , , , , , and let be arbitrary. Step 1. Given and , compute
Step 2. Compute
and
Step 3. Compute
Step 5. Set and back to Step 1. |
Recently, a great deal of effort has been devoted to the bilevel variational inequality problem (BVIP) which consists of the following:
where and are two single-valued mappings. Mathematically, as observed, the problem BVIP is very general in the sense that it includes, as special cases, the complementarity problem, variational inequality problem, Nash equilibrium problem, fixed point problem, as well as the optimization problem; see, e.g., [21,22,23].
Since the VIP is a special case of the GMEP (see, e.g., [24]) then, it is necessary to improve the BVIP to more general bilevel problems and propose effective methods for approximating numerical solutions to these bilevel problems.
The purpose of this paper is to analyze and study a more general bilevel problem: a variational inequality over the set of solutions of the generalized mixed equilibrium problem (VOGME). More precisely, the VOGME is presented as follows:
where is a bifunction, is strongly monotone, and is monotone. Combining the TEGM, the inertial idea and regularization technique, we propose two alternative methods for solving the VOGME (10). The strong convergence theorems of the suggested algorithms is established under appropriate and weaker conditions. The theoretical results are also confirmed by two numerical examples.
2. Preliminaries
Throughout this section, let be a nonempty closed convex subset of a Hilbert space . We now recall the following concepts of mappings and lemmas for the convergence analysis of our methods.
Notation 1.
Let be a sequence and x be a point in a Hilbert space .
- means that converges to x strongly;
- means that converges to x weakly;
- denotes the set of weak limits of , i.e., ;
- denotes the set of fixed points of a mapping .
Definition 1.
A mapping is said to be:
- (i)
- monotone, if
- (ii)
- α- strongly monotone, if there exists a number such that
- (iii)
- λ-inverse strongly monotone, if there exists a positive number λ such that
- (iv)
- k- Lipschitz continuous, if there exists such that
Definition 2.
The equilibrium bifunction is said to be monotone, if
Definition 3.
A single-valued operator is said to be hemicontinuous if the real function
is continuous on for all .
Lemma 1
([14]). Let be a sequence of nonnegative real numbers. Assume that
where satisfy the conditions
- (i)
- ,
- (ii)
- .
Then, .
Assumption 1.
Let be a nonempty, convex, and closed subset of a Hilbert space , and Ψ: be a bifunction satisfying the following restrictions:
- (A1)
- , ;
- (A2)
- Ψ is monotone;
- (A3)
- ;
- (A4)
- for all is convex and lower semicontinuous.
Lemma 2
([1]). Let be a bifunction satisfying Assumption 1 (A1)–(A4). For and , define a mapping by:
Then, the following results hold:
- (i)
- for each ;
- (ii)
- is single-valued;
- (iii)
- is a firmly nonexpansive mapping, i.e., for all
- (iv)
- (v)
- is closed and convex.
Lemma 3.
Let be monotone and hemicontinuous, be a proper lower semicontinuous and convex function, and be a bifunction satisfying Assumption 1 (A1)–(A4). Then the (1) is equivalent to the following problem:
Proof.
Let be a solution of the GMEP (1). We find from Assumption 1 (A2) and the monotonicity of that
Thus, is a solution of the problem (11).
Conversely, let be a solution of the problem (11). Setting for all , then . Since is a solution of the problem (11), it follows that
Utilizing Assumption 1 (A1) and (A4), we deduce
Due to the assumption that is convex, we derive that
By allowing , noting (A3) and hemicontinuous continuity of , we derive
Hence, we conclude that is a solution of the GMEP (1). This completes the proof. □
Applying Lemma 3, we can obtain the following results immediately.
Corollary 1
([25]). Suppose is a hemicontinuous and monotone operator, then is a solution of the (5) if and only if is a solution of the following problem:
Lemma 4.
Let be monotone and hemicontinuous, be a proper lower semicontinuous and convex function, and be a bifunction satisfying Assumption 1 (A1)–(A4). For and , define a mapping by:
Then, the following results hold:
- (i)
- for each ;
- (ii)
- is single-valued;
- (iii)
- is a firmly nonexpansive mapping;
- (iv)
- (v)
- is closed and convex.
Furthermore, if is β-strongly monotone, then it also holds that
- (iii)’
- is a contraction on C with contraction coefficient
Proof.
Letting it is not difficult to check that satisfies Assumption 1 (A1)–(A4). Then one finds from Lemma 2 that (i)–(v) holds. Further, if is -strongly monotone, then we have, for :
and
Adding the two inequalities, noticing Assumption 1 (A2) and the -strong monotonicity of , we have
which is equivalent to
Thus,
This implies is contractive with contraction coefficient This is the desired result . □
If for all in Lemma 4, then we obtain the following corollary.
Corollary 2.
Let be a proper lower semicontinuous and convex function, and be a bifunction satisfying Assumption 1 (A1)–(A4). Let the mapping defined by
Then, we find that
- (i)
- for each ;
- (ii)
- is single-valued;
- (iii)
- is a firmly nonexpansive mapping;
- (iv)
- (v)
- is closed and convex.
3. Main Results
In this section, we aim to establish strong convergence results for the VOGME (10) by using Tseng’s extragradient method, the inertial idea, and the regularization method. In what follows, let be a nonempty closed convex subset of a Hilbert space . Suppose that is a bifunction satisfying Assumption 1 (A1)–(A4), is a proper lower semicontinuous and convex function is monotone, and L-Lipschitz continuous, is h-strongly monotone and k-Lipschitz continuous. Additionally, we also assume that is nonempty. One finds from Lemma 4 (v) that is closed and convex. This, by strong monotonicity and continuity of , ensures the uniqueness of solutions to the VOGME (10). Together with the GMEP (1), we consider the following regularized generalized mixed equilibrium problem (RGMEP) for each : Find a point such that
Under the above assumptions, one deduces that the mapping is strongly monotone for all Notice here that the RGMEP (17) is actually equivalent to the . From Lemma 4 (v), (iii)’ and the Banach contraction principle, one deduces that the RGMEP (17) has the unique solution which is denoted by , for each We study the relationship between and as following.
Lemma 5.
Let be monotone and L- Lipschitz continuous, be h-strongly monotone and k-Lipschitz continuous, be a proper lower semicontinuous and convex function, be a bifunction satisfying Assumption 1 (A1)–(A4). Then it holds that
(i) ;
(ii) ;
(iii) , .
Proof.
(i) Taking any , we have for all , which with , implies that
Since is the solution of the RGMEP, we then find
Substituting into (19), we obtain
Observe that
Thanks to Assumption 1 (A2) and the monotonicity of , we obtain
Since , we have
This is the desired result (i). And hence, we find that is bounded.
(ii) As is closed and convex, then is weakly closed. Thus, there is a subsequence of and some point such that Take into account Assumption 1 (A2) and the monotonicity of , we find, for all , that
Since and are convex and lower semicontinuous, then they are also weakly lower semicontinuous. Passing to the super limit in (28) as , we obtain
Utilizing Lemma 3, we obtain
In view of (25), we see
Passing to the limit in (30) as and noticing the fact we deduce
which yields by Corollary 1 that is the solution of the VOGME (10). As the solution of the VOGME (10) is unique, we obtain that Therefore, the set only has one element . That is Hence, the whole sequence converges weakly to . Again using (25) with , we find
Passing in (31) to the limit as , we infer
Summing up the two inequalities above, we have
Thanks to the monotonicity of and Assumption 1(A2), we obtain
or, equivalently
It follows from the h- strong monotonicity of that
which leads to that
Therefore, we have
Since the operator is Lipschitz continuous, noting (i), we derive is also bounded. Therefore, according to (32), there exists such that . This completes the proof. □
In the following, together with the regularization method, we introduce two new numerical algorithms for solving the VOGME (10). The first algorithm (IMR) is presented as follows.
Theorem 1.
Let be a nonempty convex closed subsets of real Hilbert spaces , be a bifunction satisfying Assumption 1 (A1)–(A4), be a proper lower semicontinuous and convex function, be ω-inverse strongly monotone, and be h-strongly monotone and k-Lipschitz continuous. Let the mapping be the same as Corollary 2. Then the sequence generated by Algorithm 4 converges strongly to the unique solution of the (10) under Assumption 2 (C1)–(C5).
Assumption 2.
- (C1)
- and ;
- (C2)
- ;
- (C3)
- ;
- (C4)
- ;
- (C5)
| Algorithm 4 The inertial method with regularization (IMR). |
Initialization: Set , , and .
Let be arbitrary. Step 1. Compute
Step 2. Given , compute
Step 3. Set and return to Step 1. |
Proof.
By (C1) and Lemma 5 (ii), we have as . Hence, it is sufficient to prove that
Since is a solution of the RGMEP (17) for all , noting the definition of and Corollary 2 (ii), we have
According to Corollary 2 (iii), we deduce
Noticing (C5), we select three positive numbers such that
Utilizing the Cauchy–Schwarz inequality, we obtain
From assumptions (C1), (C3), and (C5), it follows that there exists such that
For each , by using the Cauchy–Schwarz inequality and Lemma 5 (iii), we obtain
which yields
Thus, we deduce from (35)–(39) that
where and Combining conditions (C1) and (C2), we find that and . Furthermore, utilizing condition (C3), we have
From Lemma 1, we obtain . Thus, we conclude that . This completes the proof. □
The convergence of Algorithm 4 is established under assumption that is inverse strongly monotone. In the next theorem, we consider another stepsize rule which needs only for to be monotone. Combining the inertial Tseng extragradient method and the regularization method, we propose the following iterative algorithm (ITER).
Lemma 6
([8]). The sequence generated by (41) is well defined and and , where
Theorem 2.
Let be a nonempty convex closed subsets of real Hilbert spaces , be a bifunction satisfying (A1)–(A4) and be a proper lower semicontinuous and convex function. Let be monotone and L-Lipschitz continuous and be h-strongly monotone and k-Lipschitz continuous. Let the mapping be the same as Corollary 2. Then the sequence generated by Algorithm 4 converges strongly to the unique solution of the (10) under Assumption 1 (C1)–(C4).
| Algorithm 5 The inertial Tseng extragradient method with regularization (ITER). |
Initialization: Set , , , , and . Choose a nonnegative real sequence such that . Let be arbitrary. Step 1.Compute Step 2.Given, compute Step 3.Compute Step 4.Setand return toStep 1. |
Proof.
By (C1) and Lemma 5 (iii), we obtain as . Therefore, it is sufficient to prove that Observe that
As is a solution of the RGMEP (17) for all , by the definition of and Corollary 2 (ii), we have
According to Corollary 2 (iii), we deduce
which leads to
Simple calculation shows that
or equivalently
Let , , and be positive real numbers such that
Next, we will evaluate the last term in (45). Since is h-strongly monotone, then we have
As , and noting Lemma 6, there exists such that
Hence, we obtain from (48) that
Repeating the argument for (38), we have
For each , a calculation similar to (39) guarantees that
Thus, we deduce from (46), (50), and (52) that
where and Combining conditions (C1) and (C2), we find that and . Furthermore, utilizing condition (C3), we have
From Lemma 1, we obtain . Hence, we conclude that . This completes the proof. □
Observe that, if , then the mapping reduces to the mapping . Meanwhile, the VOGME reduces to the problem (VOME):
From Theorem 2, we can obtain the following Corollary.
Corollary 3.
Let be a nonempty convex closed subset of real Hilbert spaces , be a bifunction satisfying (A1)–(A4). Let be monotone and L-Lipschitz continuous and be h-strongly monotone and k-Lipschitz continuous. Let the mapping be the same as Lemma 2. Then the sequence generated by Algorithm 6 converges strongly to the unique solution of the (54) under Assumption 1 (C1)–(C4).
| Algorithm 6 The inertial Tseng extragradient method with regularization for the mixed equilibrium problem. |
Initialization: Set , , , , and . Choose a nonnegative real sequence such that . Let be arbitrary. Step 1. Compute
Step 2. Given , compute
Step 3. Compute
Step 4. Set and return to Step 1. |
4. Numerical Example
In this subsection, we give two numerical examples to show the numerical behavior of our proposed algorithms and compare them with SVTE, STEM, TEGM.
Example 1.
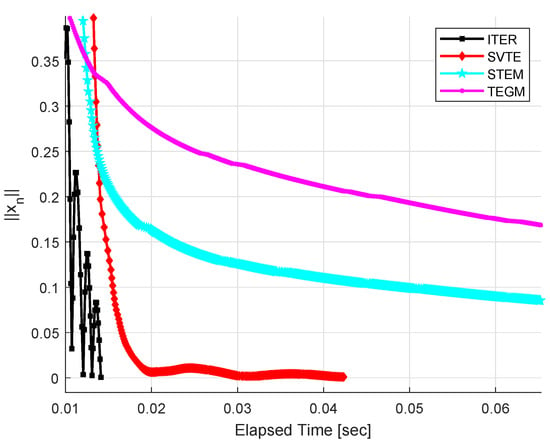
Let with inner product defined by . The feasible set is given by Take the operator where and B is an matrix, D is an diagonal matrix, whose diagonal entries are nonnegative, p is a vector in . It is clear that is monotone and L-Lipschitz-continuous with . Similarly, take the operator where and N is an matrix, G is an diagonal matrix, whose diagonal entries are positive, q is a vector in . We can check that is h-strongly monotone and k-Lipschitz continuous with , where eig represents all eigenvalues of Q. Let , for all , and for all . It is easy to see that and the unique solution to the VOGME (10) is 0.
We choose the stepsize for TEGM and for IMR. Take , , and for STEM; , , , , and for SVTE; and for IMR; , , , and for ITER. Set as stopping criterion and the initial values are generated randomly in . Figure 1 and Figure 2 describe the numerical results.
Figure 1.
Example 1, .
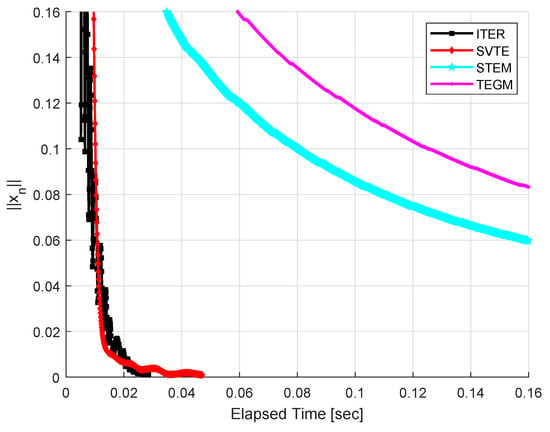
Figure 2.
Example 1, .
Example 2.
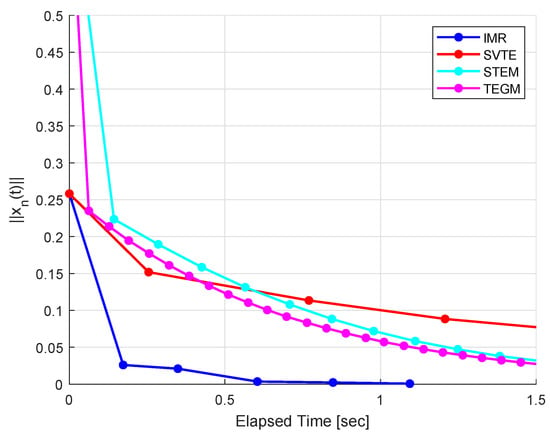
We consider an example that appears in the infinite dimensional Hilbert space with inner product and the induced norm . The feasible set is given by Let be given by for all , , , and for all . It is easy to verify that 0 is the unique solution to the VOGME (10). We choose the stepsize for TEGM and for IMR. Our parameters are the same as in Example 1. Use as stopping criterion and the numerical results are reported in Figure 3 and Figure 4.
Figure 3.
Example 2, .
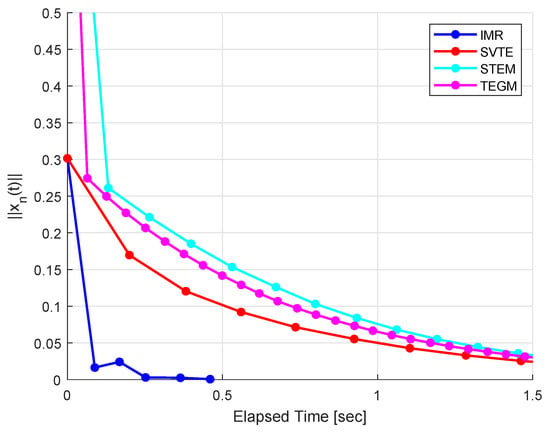
Figure 4.
Example 2, .
5. Conclusions
This work presents two alternative regularization methods for finding a solution of the variational inequality problem over the set of solutions of the generalized mixed equilibrium problem. These methods can be viewed as an improvement of Tseng’s extragradient method and the regularization method. We show that the iterative process generated by proposed methods converge strongly to solutions of above bilevel problems. The theoretical results are also confirmed by two numerical examples.
Author Contributions
Conceptualization, Y.S.; Data curation, O.B.; Funding acquisition, Y.S.; Software, Y.S.; Writing—original draft, Y.S. and O.B.; Writing—review & editing, Y.S. and O.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Key Scientific Research Project for Colleges and Universities in Henan Province (grant number 20A110038).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank reviewers and the editor for valuable comments for improving the original manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Combettes, P.L.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Tan, B.; Qin, X.; Yao, J.C. Strong convergence of self-adaptive inertial algorithms for solving split variational inclusion problems with applications. J. Sci. Comput. 2021, 87, 20. [Google Scholar] [CrossRef]
- Yao, Y.; Cho, Y.J.; Liou, Y.C. Algorithms of common solutions for variational inclusions, mixed equilibrium problems and fixed point problems. Eur. J. Oper. Res. 2011, 212, 242–250. [Google Scholar] [CrossRef]
- Song, Y.L.; Bazighifan, O. A New Alternative Regularization Method for Solving Generalized Equilibrium Problems. Mathematics 2022, 10, 1350. [Google Scholar] [CrossRef]
- Song, Y.L. Hybrid Inertial Accelerated Algorithms for Solving Split Equilibrium and Fixed Point Problems. Mathematics 2021, 9, 2680. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Karahan, I. A general alternative regularization method with line search technique for solving split equilibrium and fixed point problems in Hilbert spaces. Comput. Appl. Math. 2020, 39, 150. [Google Scholar] [CrossRef]
- Korpelevich, G.M. An extragradient method for finding saddle points and for other problems. Matecon 1976, 12, 747–756. [Google Scholar]
- Tan, B.; Qin, X. Self adaptive viscosity-type inertial extragradient algorithms for solving variational inequalities with applications. Math. Model. Anal. 2022, 27, 41–58. [Google Scholar] [CrossRef]
- Fichera, G. Sul problema elastostatico di Signorini con ambigue condizioni al contorno. Atti Accad. Naz. Lincei Rend. Cl. Sci. Fis. Mat. Nat. 1963, 34, 138–142. [Google Scholar]
- Hartman, P.; Stampacchia, G. On some nonlinear elliptic differential functional equations. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Bnouhachem, A.; Chen, Y. An iterative method for a common solution of generalized mixed equilibrium problem, variational inequalities and hierarchical fixed point problems. Fixed Point Theory Appl. 2014, 2014, 155. [Google Scholar] [CrossRef]
- Bazighifan, O. An approach for studying asymptotic properties of solutions of neutral differential equations. Symmetry 2020, 12, 555. [Google Scholar] [CrossRef]
- Bazighifan, O.; Kumam, P. Oscillation theorems for advanced differential equations with p-Laplacian like operators. Mathematics 2020, 8, 821. [Google Scholar] [CrossRef]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2002, 2, 240–256. [Google Scholar] [CrossRef]
- Goebel, K.; Reich, S. Uniform Convexity, Hyperbolic Geometry, and Nonexpansive Mappings; Marcel Dekker, Inc.: New York, NY, USA, 1984. [Google Scholar]
- Xu, H.K. Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl. 2004, 298, 279–291. [Google Scholar] [CrossRef]
- Antipin, A.S. On a method for convex programs using a symmetrical modification of the Lagrange function. Ekon. Mat. Metody. 1976, 12, 1164–1173. [Google Scholar]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mapping. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Bauschke, H.; Combettes, P. A weak-to-strong convergence principle for feje´r-monotone methods in Hilbert spaces. Math. Oper. Res. 2001, 26, 248–264. [Google Scholar] [CrossRef]
- Yang, J.; Liu, H. Strong convergence result for solving monotone variational inequalities in Hilbert spaces. Numer. Algor. 2019, 80, 741–752. [Google Scholar] [CrossRef]
- Thong, D.V.; Li, X.H.; Dong, Q.L.; Cho, Y.J.; Rassias, T.M. A projection and contraction method with adaptive step sizes for solving bilevel pseudo-monotone variational inequality problems. Optimization 2020, 71, 2073–2096. [Google Scholar] [CrossRef]
- Tan, B.; Liu, L.; Qin, X. Self adaptive inertial extragradient algorithms for solving bilevel pseudomonotone variational inequality problems. Jpn. Ind. Appl. Math. 2021, 38, 519–543. [Google Scholar] [CrossRef]
- Song, Y.; Bazighifan, O. Regularization Method for the Variational Inequality Problem over the Set of Solutions to the Generalized Equilibrium Problem. Mathematics 2022, 10, 2443. [Google Scholar] [CrossRef]
- Moudafi, A. Proximal methods for a class of bilevel monotone equilibrium problems. J. Glob. Optim. 2010, 47, 287–292. [Google Scholar] [CrossRef]
- Cottle, R.W.; Yao, J.C. Pseudo-monotone complementarity problems in Hilbert space. J. Optim. Theory Appl. 1992, 75, 281–295. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).