
Developing a Variable Speed Limit Control Strategy for Mixed Traffic Flow Based on Car-Following Collision Avoidance Theory



Abstract
:1. Introduction
2. Literature Review
3. Methodology
3.1. Car-Following Models
- (1)
- Cruise model
- (2)
- IDM model
- (3)
- ACC model
- (4)
- CACC model
3.2. Lane-Changing Model
3.3. VSL Control Strategy Based on Car-Following Collision Avoidance Theory
- (1)
- There is only one zero in [0, +∞).
- (2)
- There are multiple zeros in [0, +∞)
3.4. Evaluative Measurements
4. Simulation Experiment Design
5. Simulation Results and Discussions
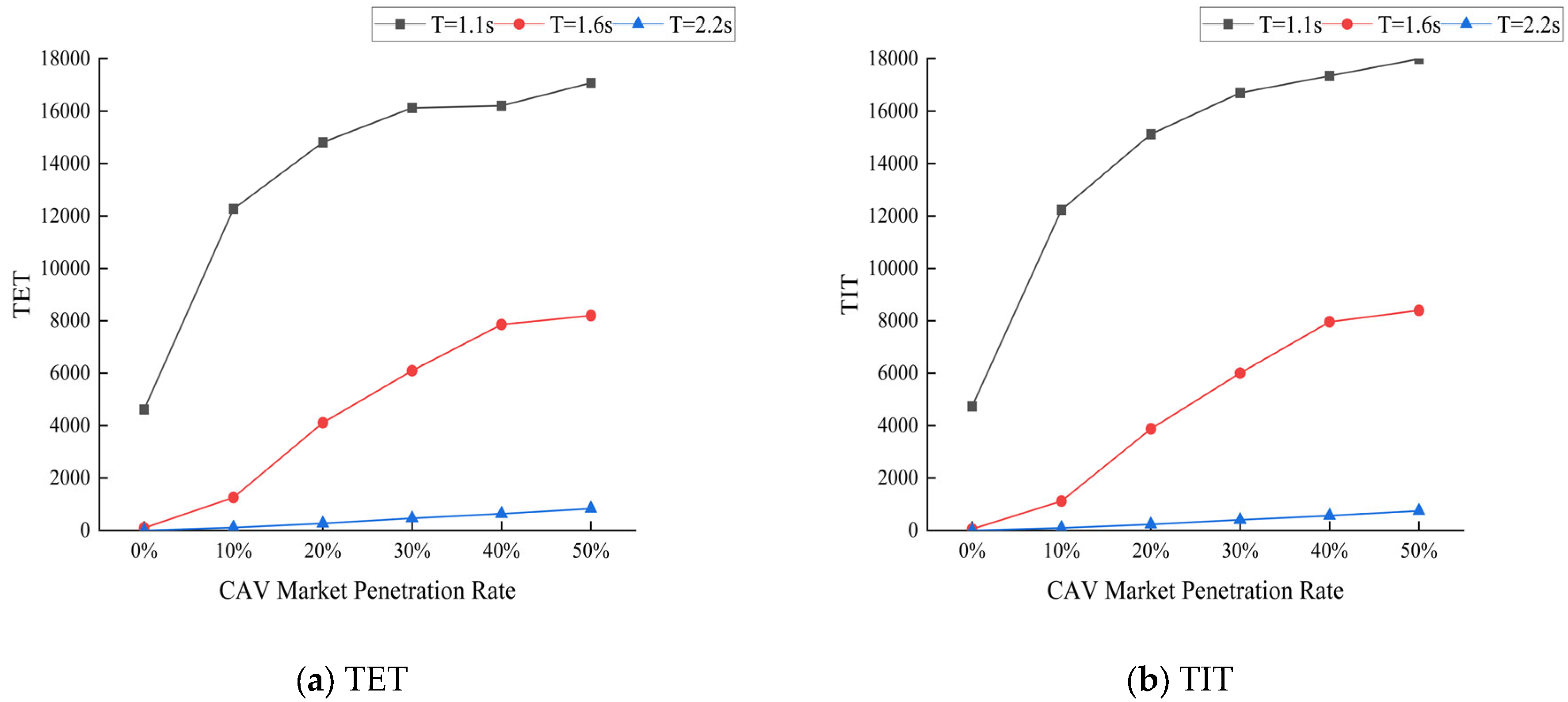
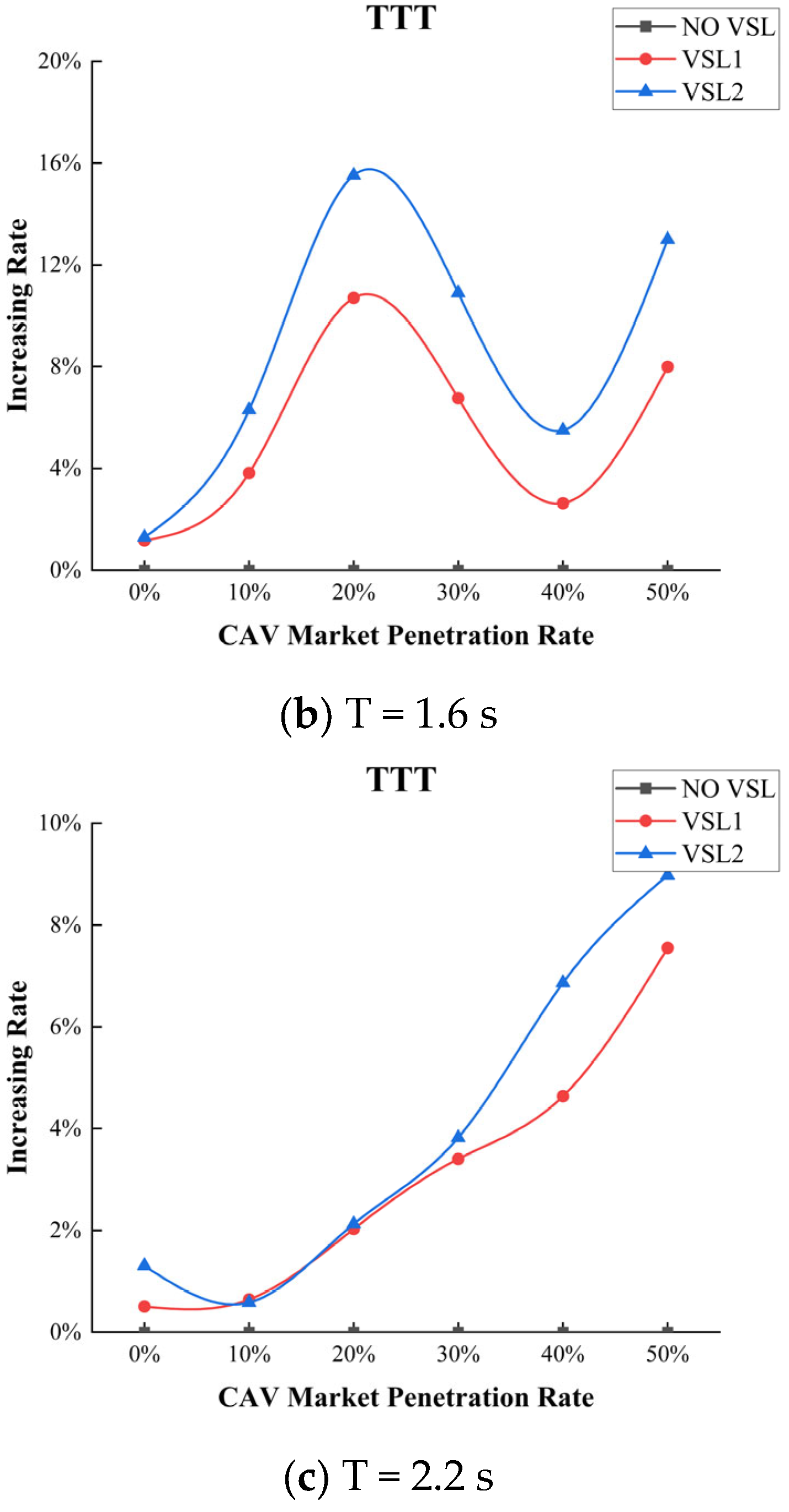
5.1. The Influence of Safe Time Gap
- (1)
- Most of the CAVs will be downgraded to ACC ones in the situation of low CAV market penetration rates. Assuming that the market penetration rate of CAV is , the market penetration rate of human-driven vehicles is (1 − ). Then, the theoretical probability of CAV operating in CACC mode is and that in ACC mode is . When , the theoretical probability of CAV vehicles operating in ACC mode increases with the rise of CAV MPR. Meanwhile, it has been proven that the ACC vehicles are unstable, amplifying the speed variations of preceding vehicles [42];
- (2)
- The initial equilibrium formulas of CAVs and HDVs are shown as follows:
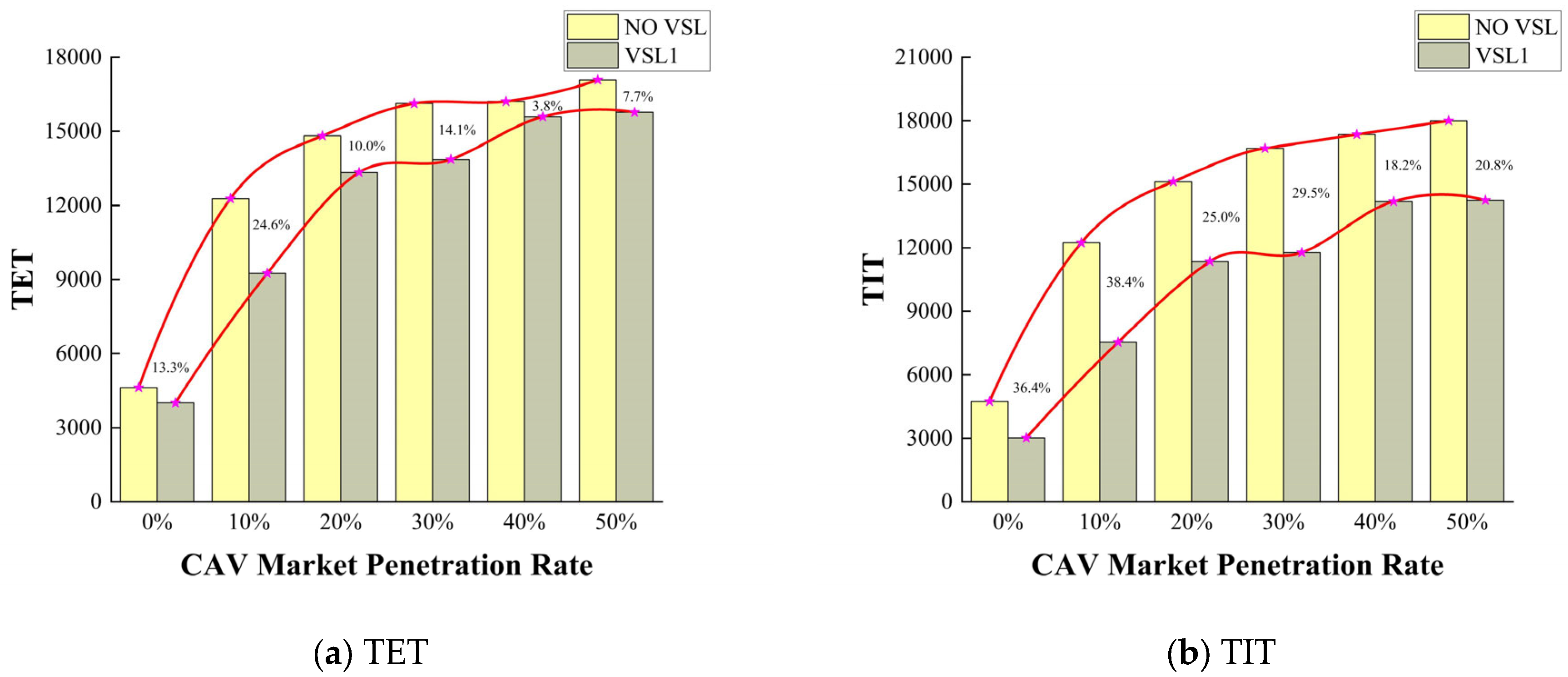
5.2. The Performance of VSL Control Strategy Derived from Secondary Collision Risks Reduction Strategy
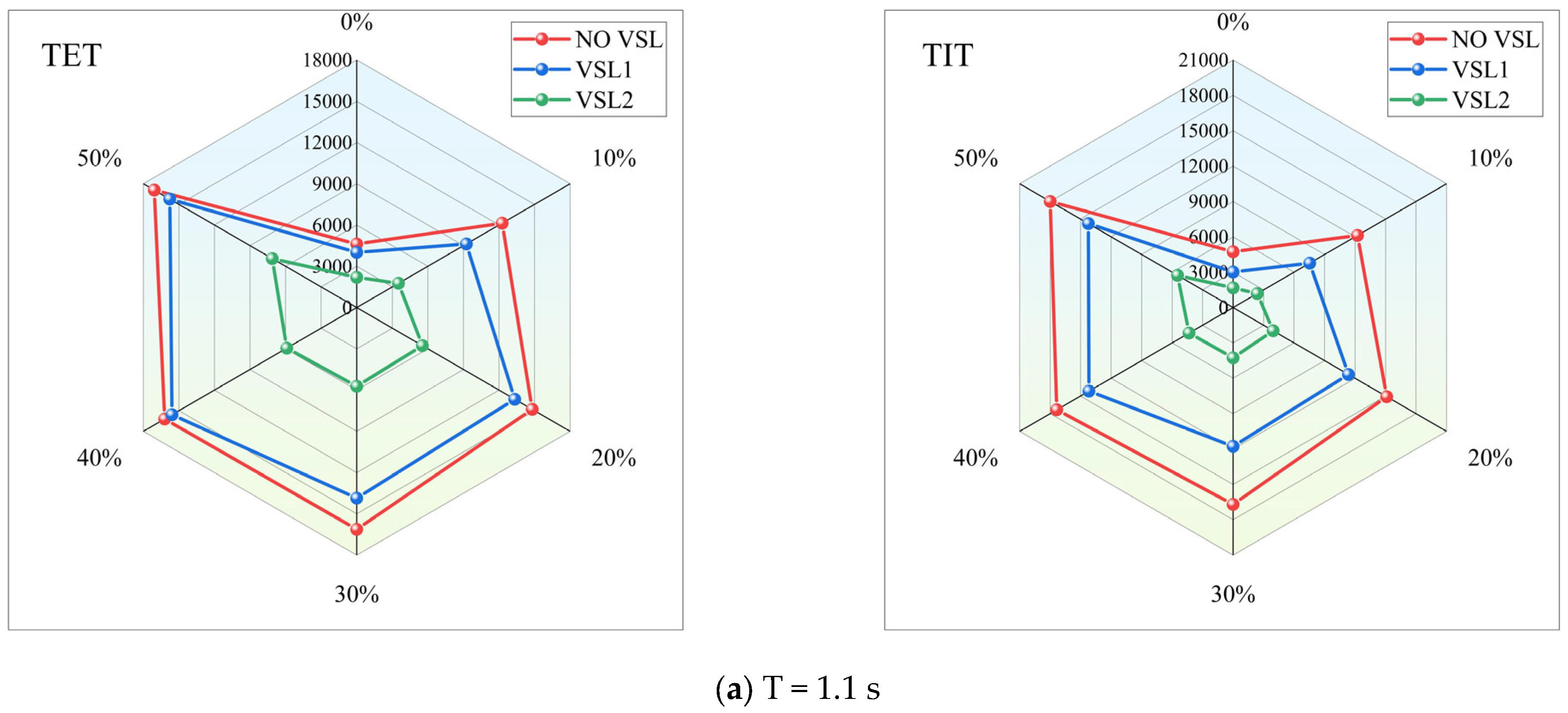
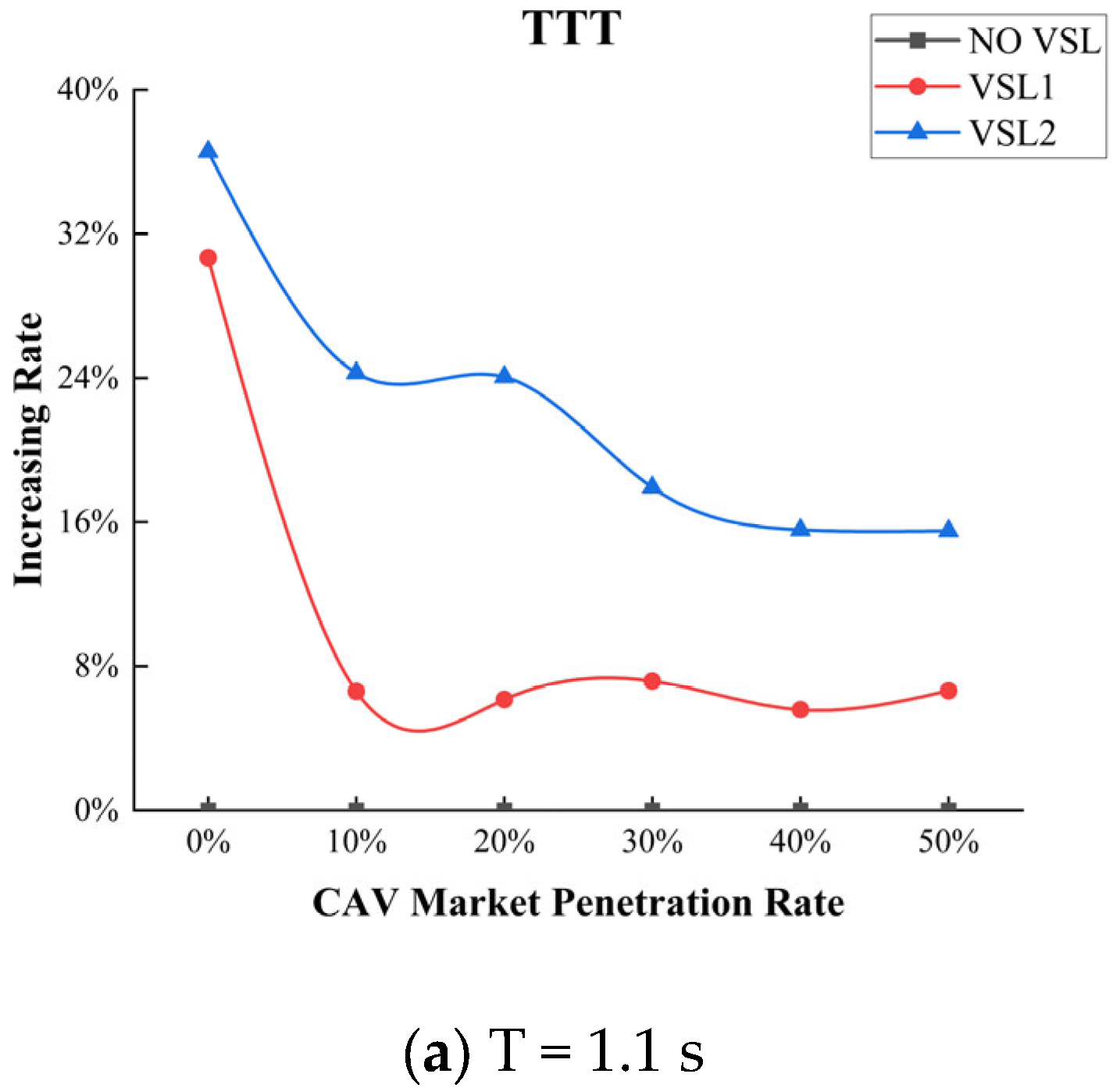
5.3. The Performance of VSL Control Strategy Derived from Collision Avoidance Theory
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M. Local feedback-based mainstream traffic flow control on motorways using variable speed limits. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1261–1276. [Google Scholar] [CrossRef]
- Frejo, J.R.D.; Camacho, E.F. Global versus local MPC algorithms in freeway traffic control with ramp metering and variable speed limits. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1556–1565. [Google Scholar] [CrossRef]
- Hegyi, A.; De Schutter, B.; Hellendoorn, J. Optimal coordination of variable speed limits to suppress shock waves. IEEE Trans. Intell. Transp. Syst. 2005, 6, 102–112. [Google Scholar] [CrossRef]
- Li, Z.; Liu, P.; Wang, W.; Xu, C. Development of a control strategy of variable speed limits to reduce rear-end collision risks near freeway recurrent bottlenecks. IEEE Trans. Intell. Transp. Syst. 2014, 15, 866–877. [Google Scholar]
- Müller, E.R.; Carlson, R.C.; Kraus, W.; Papageorgiou, M. Microsimulation analysis of practical aspects of traffic control with variable speed limits. IEEE Trans. Intell. Transp. Syst. 2015, 16, 512–523. [Google Scholar] [CrossRef]
- Zhang, Y.; Ioannou, A.P. Combined variable speed limit and lane change control for highway traffic. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1812–1823. [Google Scholar] [CrossRef]
- Han, Y.; Chen, D.; Ahn, S. Variable speed limit control at fixed freeway bottlenecks using connected vehicles. Transp. Res. Part B: Methodol. 2017, 98, 113–134. [Google Scholar] [CrossRef]
- Khondaker, B.; Kattan. LVariable speed limit: A microscopic analysis in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 58, 146–159. [Google Scholar] [CrossRef]
- Mao, P.; Ji, X.; Qu, X.; Li, L.; Ran, B. A Variable Speed Limit Control Based on Variable Cell Transmission Model in the Connecting Traffic Environment. IEEE Trans. Intell. Transp. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; van Arem, B. Connected variable speed limits control and car-following control with vehicle-infrastructure communication to resolve stop-and-go waves. J. Intell. Transp. Syst. 2016, 20, 559–572. [Google Scholar] [CrossRef]
- Wu, Y.; Abdel-Aty, M.; Wang, L.; Rahman, M.S. Combined connected vehicles and variable speed limit strategies to reduce rear-end crash risk under fog conditions. J. Intell. Transp. Syst. 2020, 24, 494–513. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, W.; Ma, J.; Li, H.; Chen, Y.; Rong, J. Effects of connected vehicle-based variable speed limit under different foggy conditions based on simulated driving. Accid. Anal. Prev. 2019, 128, 206–216. [Google Scholar] [CrossRef] [PubMed]
- Boggs, A.M.; Wali, B.; Khattak, A.J. Exploratory analysis of automated vehicle crashes in California: A text analytics & hierarchical Bayesian heterogeneity-based approach. Accid. Anal. Prev. 2020, 135, 105354. [Google Scholar]
- Li, Z.; Li, Y.; Liu, P.; Wang, W.; Xu, C. Development of a variable speed limit strategy to reduce secondary collision risks during inclement weathers. Accid. Anal. Prev. 2014, 72, 134–145. [Google Scholar] [CrossRef]
- Dörschel, L.; Abel, D. Traffic Control on Freeways Using Variable Speed Limits. IFAC-Pap. 2020, 53, 14924–14929. [Google Scholar] [CrossRef]
- Frejo, J.R.; Papamichail, I.; Papageorgiou, M.; De Schutter, B. Macroscopic modeling of variable speed limits on freeways. Transp. Res. Part C Emerg. Technol. 2019, 100, 15–33. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, M.; Liu, T.; Luo, J. An Extended Variable Speed Limit Strategy for Intelligent Freeway Traffic Optimization. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Göksu, G.; Silgu, M.A.; Erdağı, İ.G.; Çelikoğlu, H.B. Integral Input-to-State Stability of Traffic Flow with Variable Speed Limit. IFAC-Pap. 2021, 54, 31–36. [Google Scholar] [CrossRef]
- Song, H.; Wang, J. Combination Strategy of Dynamic Variable Speed Limit Method Based on Real-Time Crash Prediction Model for Highway. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; IEEE: New York, NY, USA, 2019; pp. 621–627. [Google Scholar]
- Zhang, Y.; Sirmatel, I.I.; Alasiri, F.; Ioannou, P.A.; Geroliminis, N. Comparison of feedback linearization and model predictive techniques for variable speed limit control. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Muai, HI, USA, 4–7 November 2018; IEEE: New York, NY, USA, 2018; pp. 3000–3005. [Google Scholar]
- Yu, M.; Fan, W. Optimal variable speed limit control at a lane drop bottleneck: Genetic algorithm approach. J. Comput. Civ. Eng. 2018, 32, 04018049. [Google Scholar] [CrossRef]
- Wang, B.; Guang, X.; Zhou, Q.; Lv, Q. Control Method of Variable Speed Limits at the Freeway Tunnel Entrance under Rainy Weather. CICTP 2019, 2019, 3626–3635. [Google Scholar]
- Kušić, K.; Dusparic, I.; Guériau, M.; Gregurić, M.; Ivanjko, E. Extended variable speed limit control using multi-agent reinforcement learning. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; IEEE: New York, NY, USA, 2020; pp. 1–8. [Google Scholar]
- Wu, Y.; Tan, H.; Qin, L.; Ran, B. Differential variable speed limits control for freeway recurrent bottlenecks via deep actor-critic algorithm. Transp. Res. Part C: Emerg. Technol. 2020, 117, 102649. [Google Scholar] [CrossRef]
- Ke, Z.; Li, Z.; Cao, Z.; Liu, P. Enhancing transferability of deep reinforcement learning-based variable speed limit control using transfer learning. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4684–4695. [Google Scholar] [CrossRef]
- Qian, G.; Lee, J.B. Variable speed limits for motorway off-ramp queue protection. IEEE Intell. Transp. Syst. Mag. 2018, 12, 64–76. [Google Scholar] [CrossRef]
- Du, S.; Razavi, S. Fault-tolerant control of variable speed limits for freeway work zone using likelihood estimation. Adv. Eng. Inform. 2020, 45, 101133. [Google Scholar] [CrossRef]
- Khondaker, B.; Kattan, L. Variable speed limit strategy with anticipatory lane changing decisions. J. Intell. Transp. Syst. 2021, 25, 547–559. [Google Scholar] [CrossRef]
- Martínez, I.; Jin, W.L. Optimal location problem for variable speed limit application areas. Transp. Res. Part B Methodol. 2020, 138, 221–246. [Google Scholar] [CrossRef]
- Pu, Z.; Li, Z.; Jiang, Y.; Wang, Y. Full Bayesian before-after analysis of safety effects of variable speed limit system. IEEE Trans. Intell. Transp. Syst. 2020, 22, 964–976. [Google Scholar] [CrossRef]
- Yazıcıoğlu, A.Y.; Roozbehani, M.; Dahleh, M.A. Resilient control of transportation networks by using variable speed limits. IEEE Trans. Control Netw. Syst. 2017, 5, 2011–2022. [Google Scholar] [CrossRef]
- Lu, X.-Y.; Shladover, S. MPC-based variable speed limit and its impact on traffic with V2I type ACC. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: New York, NY, USA, 2018; pp. 3923–3928. [Google Scholar]
- Grumert, E.F.; Tapani, A. Bottleneck mitigation through a variable speed limit system using connected vehicles. Transp. A Transp. Sci. 2020, 16, 213–233. [Google Scholar] [CrossRef]
- Gregurić, M.; Mandžuka, S.; Šoštaric, M. The application of cooperative variable speed limit control for reduction of crash potential. In Proceedings of the 2019 International Symposium ELMAR, Zadar, Croatia, 23–25 September 2019; IEEE: New York, NY, USA; pp. 1–4. [Google Scholar]
- Yao, H.; Cui, J.; Li, X.; Wang, Y.; An, S. A trajectory smoothing method at signalized intersection based on individualized variable speed limits with location optimization. Transp. Res. Part D Transp. Environ. 2018, 62, 456–473. [Google Scholar] [CrossRef]
- Nezafat, R.V.; Beheshtitabar, E.; Cetin, M.; Williams, E.; List, G.F. Modeling and evaluating traffic flow at sag curves when imposing variable speed limits on connected vehicles. Transp. Res. Rec. 2018, 2672, 193–202. [Google Scholar] [CrossRef]
- Li, Y.; Xu, C.; Xing, L.; Wang, W. Integrated cooperative adaptive cruise and variable speed limit controls for reducing rear-end collision risks near freeway bottlenecks based on micro-simulations. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3157–3167. [Google Scholar] [CrossRef]
- Guériau, M.; Dusparic, I. Quantifying the impact of connected and autonomous vehicles on traffic efficiency and safety in mixed traffic. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; IEEE: New York, NY, USA, 2020; pp. 1–8. [Google Scholar]
- Xiao, L.; Wang, M.; Schakel, W.; van Arem, B. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks. Transp. Res. Part C Emerg. Technol. 2018, 96, 380–397. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef] [PubMed]
- Schakel, W.J.; Knoop, V.L.; van Arem, B. Integrated lane change model with relaxation and synchronization. Transp. Res. Rec. 2012, 2316, 47–57. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- Liu, H.; Kan, X.; Shladover, S.E.; X-Lu, Y.; Ferlis, R.E. Impact of cooperative adaptive cruise control on multilane freeway merge capacity. J. Intell. Transp. Syst. 2018, 22, 263–275. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. General lane-changing model MOBIL for car-following models. Transp. Res. Rec. 2007, 1999, 86–94. [Google Scholar] [CrossRef]
- Arun, A.; Haque, M.M.; Washington, S.; Sayed, T.; Mannering, F. A systematic review of traffic conflict-based safety measures with a focus on application context. Anal. Methods Accid. Res. 2021, 32, 100185. [Google Scholar] [CrossRef]
- Wang, C.; Xie, Y.; Huang, H.; Liu, P. A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling. Accid. Anal. Prev. 2021, 157, 106157. [Google Scholar] [CrossRef]
- Mahmud, S.S.; Ferreira, L.; Hoque, M.S.; Tavassoli, A. Application of proximal surrogate indicators for safety evaluation: A review of recent developments and research needs. IATSS Res. 2017, 41, 153–163. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Wang, W.; Xing, L.; Liu, S.; Wei, X. Evaluation of the impacts of cooperative adaptive cruise control on reducing rear-end collision risks on freeways. Accid. Anal. Prev. 2017, 98, 87–95. [Google Scholar] [CrossRef] [PubMed]
- Xing, L.; He, J.; Abdel-Aty, M.; Cai, Q.; Li, Y.; Zheng, O. Examining traffic conflicts of up stream toll plaza area using vehicles’ trajectory data. Accid. Anal. Prev. 2019, 125, 174–187. [Google Scholar] [CrossRef]
- Xing, L.; He, J.; Li, Y.; Wu, Y.; Yuan, J.; Gu, X. Comparison of different models for evaluating vehicle collision risks at upstream diverging area of toll plaza. Accid. Anal. Prev. 2020, 135, 105343. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Wang, H.; Wang, W.; Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accid. Anal. Prev. 2017, 104, 137–145. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Wang, W.; Liu, S.; Xiang, Y. Reducing the risk of rear-end collisions with infrastructure-to-vehicle (I2V) integration of variable speed limit control and adaptive cruise control system. Traffic Inj. Prev. 2016, 17, 597–603. [Google Scholar] [CrossRef]
- Liu, T.; Li, Z.; Liu, P.; Xu, C.; Noyce, D.A. Using empirical traffic trajectory data for crash risk evaluation under three-phase traffic theory framework. Accid. Anal. Prev. 2021, 157, 106191. [Google Scholar] [CrossRef] [PubMed]
- Kušić, K.; Ivanjko, E.; Vrbanić, F.; Gregurić, M.; Dusparic, I. Spatial-temporal traffic flow control on motorways using distributed multi-agent reinforcement learning. Mathematics 2021, 9, 3081. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning | Value | |
|---|---|---|---|
| HDV | CAV | ||
| (m) | Sight distance | 100 | 100 |
| (m/s2) | Desire deceleration | 2 | 2 |
| (s) | Perception–reaction time | 1 | 0 |
| (m) | Average vehicle length | 5 | 5 |
| (m/s2) | Max acceleration | 1 | 1 |
| (m/s) | Desire speed | 30 | 30 |
| (m) | Minimum gap at standstill | 0 | 0 |
| (s) | Safe time gap | 1.1, 1.6, 2.2 | 1.1, 1.6, 2.2 |
| (s) | Data aggregation interval | 30 | 30 |
| (s) | Simulation step | 0.1 | 0.1 |
| Altruistic factor | 0 | 1 | |
| Lane changing threshold | 1 | 1 | |
| Asymmetric lane changing parameter | 0 | 0 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, C.; Shi, Y.; Pan, B.; Li, Y. Developing a Variable Speed Limit Control Strategy for Mixed Traffic Flow Based on Car-Following Collision Avoidance Theory. Mathematics 2022, 10, 2987. https://doi.org/10.3390/math10162987
Yuan C, Shi Y, Pan B, Li Y. Developing a Variable Speed Limit Control Strategy for Mixed Traffic Flow Based on Car-Following Collision Avoidance Theory. Mathematics. 2022; 10(16):2987. https://doi.org/10.3390/math10162987
Chicago/Turabian StyleYuan, Chen, Yuntao Shi, Bin Pan, and Ye Li. 2022. "Developing a Variable Speed Limit Control Strategy for Mixed Traffic Flow Based on Car-Following Collision Avoidance Theory" Mathematics 10, no. 16: 2987. https://doi.org/10.3390/math10162987
APA StyleYuan, C., Shi, Y., Pan, B., & Li, Y. (2022). Developing a Variable Speed Limit Control Strategy for Mixed Traffic Flow Based on Car-Following Collision Avoidance Theory. Mathematics, 10(16), 2987. https://doi.org/10.3390/math10162987