Abstract
Due to dynamics caused by factors such as random collection and transportation requirements, vehicle failures, and traffic jams, it is difficult to implement regular waste collection and transportation schemes effectively. A challenge for the stable operation of the municipal solid waste collection and transportation (MSWCT) system is how to obtain the whole process data in real time, dynamically judge the process control requirements, and effectively promote the synchronization operation between multiple systems. Based on this situation, this study proposes a cloud-edge-terminal-based synchronization decision-making and control system for MSWCT. First, smart terminals and edge computing devices are deployed at key nodes of MSWCT for real-time collection and edge computing analysis of the whole process data. Second, we propose a collaborative analysis and distributed decision-making method based on the cloud-edge-terminal multi-level computing architecture. Finally, a “three-level and two-stage” synchronization decision-making mechanism for the MSWCT system is established, which enables the synchronization operation between various subsystems. With a real-world application case, the efficiency and effectiveness of the proposed decision-making and control system are evaluated based on real data of changes in fleet capacity and transportation costs.
Keywords:
municipal solid waste; waste classification; waste logistics; waste collection and transportation; IoT; cloud-edge collaboration; synchronization MSC:
00A06
1. Introduction
Waste classification is an efficient way for municipal solid waste management under the circular economy. It aims to maximize the value of recycling waste and achieve zero waste [1]. The municipal solid waste collection and transportation (MSWCT) system is the basis for ensuring waste classification [2]. The operation process of the system includes four parts: the classification and storage of waste at collection points, the classification and collection of collection vehicles, the compression and storage of transfer stations, and the classification and transportation of transit trucks. Additionally, the operational cost of the MSWCT system accounts for 60–80% of the total waste management cost [3,4]. As the MSWCT system operation process involves multiple units and decision-making subjects, there are management challenges.
Due to random waste generation, the uncertain system resources, and the complex driving paths, the operation process of the MSWCT system is subject to temporarily increased collection and transportation orders, vehicle failures, traffic jams, and other dynamic disturbances. It may affect the MSWCT scheme and progress of the system [5]. In addition, due to the lack of synchronization within and between units of the MSWCT system [6], the dynamic disturbances of some units may cause a bullwhip effect. It may result in poor operation of the overall system. This may cause the entire system to not run smoothly, causing problems such as overflowing trash bins, full loading of transfer stations, and odors in trash bins. Therefore, how to realize the synchronized decision making and control of the system in a dynamic environment is the key to the management and control of the MSWCT system [6,7].
For the above issues, relevant government departments and participating companies have introduced the latest technologies of Internet of Things (IoT), aiming to obtain real-time system data through the ubiquitous perception capabilities of IoT, and enable the visualization of the operation process [8,9,10,11,12]. The development and wide application of IoT technologies has improved the real-time data acquisition capability of the collection and transportation process, and has enabled the system to capture dynamic disturbances timely. However, the IoT information management system of local subsystems is still unable to meet the requirements of real-time synchronized decision making and control of the MSWCT system. There are three major challenges: (1) how to obtain the global system disturbance information in real time; (2) how to dynamically judge process control requirements after the occurrence of system dynamics; and (3) how to realize the synchronized operation among subsystems after clarifying the process dynamic control requirements, and achieve the global optimization.
In order to address the above challenges, this paper proposes a cloud-edge-terminal-based synchronized decision-making and control system (CET-SDCS) for MSWCT. First, through the deployment of a large number of terminal collection devices and an appropriate amount of edge computing devices, the accurate collection and efficient transmission of real-time data in the whole process of the system is realized. Secondly, after the system detects the occurrence of dynamics, the system will use the cloud-edge collaborative analysis and processing to achieve accurate judgment of the dynamic level. Finally, through the analysis of the multi-stage synchronized mechanism, the high real-time performance of the MSWCT system is realized as high-precision, high-cooperative synchronized decision-making and control.
The novelty and contribution of this paper is mainly to use the cloud-edge-terminal architecture to build a set of synchronized decision-making systems for MSWCT management, in order to realize distributed synchronized decision-making between multiple regions and multiple subjects. It is an innovative application of the synchronization mechanism and method in the MSWCT system, which significantly improves system operation efficiency and reduces system operation cost. Case examples for the management of municipal solid waste are provided.
The remainder of this paper is organized as follows: Section 2 briefly reviews relevant literature on three types of research: IoT-enabled intelligent waste logistics management, the concept of cloud-edge collaboration and its applications, and synchronized optimization of complex systems in dynamic environments; Section 3 provides the problem description; Section 4 introduces the CET-SDCS framework, device deployment, and operation mechanism; Section 5 provides a case study on how CET-SDCS improves the efficiency of the real-world municipal solid waste collection and transportation operation and recovery of usable value; and Section 6 summarizes the findings of this paper and future research directions.
2. Literature Review
We summarize related research from three aspects: Internet of Things (IoT)-enabled waste logistics management, the cloud-edge collaboration concept and its application, and synchronized optimization of complex systems in dynamic environments.
2.1. Smart Waste Logistics Management Enabled by IoT
The whole life cycle management of municipal solid waste has received considerable attention from scholars in recent years [13,14,15,16]. Due to the low efficiency of traditional waste collection and transportation, more and more cities are choosing to use IoT to drive the comprehensive, coordinated, and sustainable development of sanitation [17]. At present, the application of the IoT in urban domestic waste treatment, mainly based on more mature technology such as RFID electronic tags, GPS, etc., through the combination of a variety of technologies, so that enterprises can effectively improve the efficiency of waste collection [18]. As described by [19], modern tracking devices, such as volume sensors, can be used to obtain real-time information to minimize the distance covered and the number of vehicles required for collection by optimizing the route plan. Ref. [20] proposed a novel model, structure, and smart sensing algorithm for a real-time solid waste monitoring system, and this information can be used to optimize collection routes and reduce collection costs and carbon emissions, thus contributing to environmental sustainability. Ref. [21] optimized waste collection routes by locating and tracking bins to reduce costs and increase recycling rates. Ref. [22] presented a smart waste collection path problem that attempted to use real-time data on the bins to optimize the collection routes with three different business management approaches to process the information transmitted by the sensors. Ref. [23] proposed that IoT can also be used for intelligent coordination of waste trucks to improve the management efficiency of waste disposal companies and to reduce harmful emissions from waste trucks.
2.2. Cloud-Edge Collaboration Concept and Its Application
The concept of cloud computing was first introduced by Armbrust M in 2005, who defined cloud computing as both the applications delivered as services over the Internet and the hardware and systems software in the data centers that provide those services [24]. Its advantages include reduced computational costs, software costs, and improved computational performance, while the availability of virtually unlimited storage and low-cost processing power enables a new model of computing.
Edge computing can be traced back to the content delivery network proposed by Akamai in 1998, and the concept of edge computing was formally introduced in 2013 [25], and has been developed rapidly since then. Edge computing is a new computing mode, which is an open platform that integrates core capabilities of the network, computing, storage, and application close to objects or data sources to provide services closest to objects or data sources [26,27]. Edge computing is essentially an extension of the definition of cloud computing. Unlike cloud computing, edge computing is located at the edge of the network, near IoT devices [28]. They complement each other. Edge computing needs the support of a cloud computing center with powerful computing capacity and mass storage, while cloud computing center also needs edge devices to deal with mass data and private data to relieve the pressure of network broadband and the cloud data center. In the era of Internet of everything, there are many cases of cloud computing and edge computing combined together [29].
2.3. Synchronized Optimization of Complex Systems under Dynamics
Synchronization has received increasing attention in recent years as an important production control mechanism in Industry 4.0. Ref. [30] defined the concept of synchronization decision making as “a dynamic collaborative decision making approach in which the system autonomously mobilizes the most appropriate capacity or resources within and outside the system to best respond to dynamic disturbances throughout the life cycle of the production system”. Ref. [31] proposed an IoT-based production logistics linkage system that responds to the dynamics of the manufacturing system execution process, thus reducing the delivery time. Ubiquitous technology is employed to synchronize production and logistics at the operational level to create a close decision–execution loop [32]. Ref. [33] presented a new view of coordinated decision making in integrated supply chain scheduling, i.e., coordinated lot delivery and order acceptance, and developed coordinated order acceptance and supply chain scheduling for lot direct delivery using three PL suppliers, and proposed two mixed integer plans. Ref. [34] proposed a multi-level cloud computing digital twin system for real-time monitoring, decision making, and control of production logistics linkage systems. In an IoT-driven production logistics linkage (PLS) system with complete real-time information, the negative impact of dynamics on the overall operational state of its system is evaluated to deal with dynamics in the most efficient and cost-effective way. Ref. [35] discussed the problem of route determination of collection vehicles at the transfer station, as well as their synchronization. The results show that the approach combining the collection phase with the transport phase can achieve a consistent reduction in the number of collection vehicles required.
2.4. Literature Summary
Firstly, IoT and cloud-edge collaborative technologies provide effective methods and technical frameworks for decision making and control of municipal waste management systems. However, to our knowledge, using two such methods for managing waste collection and transportation rarely has been discussed.
Secondly, in recent studies, waste collection and waste transportation have been treated as two systems with independent decision making, and few studies have focused on the study of linked decision making for waste collection and transportation systems in dynamic environments. Therefore, how to establish the integrated framework considering multi-scale and multi-stage state sensing and timely synchronized optimization is an urgent problem in the MSWCT system.
3. Problems Description
This section mainly introduces the operation process of the MSWCT system, and analyses the difficulties faced by the current system.
3.1. Operation Process of the MSWCT System
The operation process of the MSWCT system is shown in Figure 1, including “two stages and four steps”. The two stages mainly refer to the collection stage and the transportation stage. The four units include the waste storage at the collection point, the recycling waste pick-up of collection vehicles, the waste transfer, and the waste transit. The entire system operation is triggered by pick-up requirements of the waste collection point. After going through the four steps in sequence, the waste at the collection point finally goes to the circular economy industrial park for final treatment.
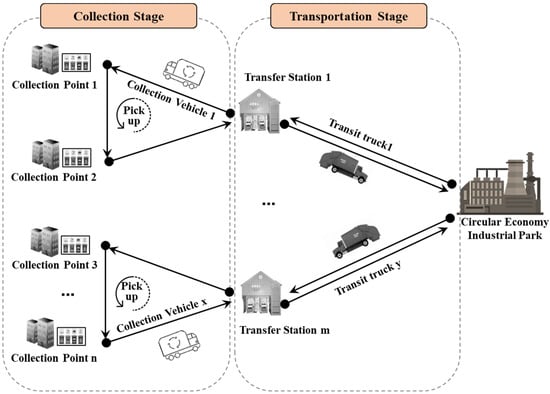
Figure 1.
Operation process of the MSWCT system.
3.2. Analysis of the Operation Process of the MSWCT System
During the operation process of the MSWCT system, each step is decided independently, but all steps are closely associated in operation. The collection fleet develops and executes the collection plan according to the pick-up requirements of the collection point and the internal resource allocation. The transit fleet develops and executes the transit plan according to the transit requirements of the transfer station and the internal resource configuration.
However, due to the random generation time of waste and the high uncertainty of the amount of waste generated, the collection and transportation requirements are constantly changing at the collection point. Moreover, the waste collection and transportation and transit process faces random disturbances from various internal and external factors such as vehicle failure, traffic jam, and bad weather. Regarding random changes in requirements and various disturbances, if the system decision is not made timely, the collection plan and the transit plan may fail to be executed normally. Additionally, there will be problems including overflowing trash bins, overfilled warehouses at transfer stations, and trash bin odors.
After analysis, we conclude three main reasons for the above problems:
(1) Failure to obtain the real-time information on the whole process of waste collection and transportation. There are two main parts: first, vertically speaking, the internal decision-making layer of each subsystem cannot truly understand the real-time operation status of the execution layer. Due to inaccurate underlying data or delayed data upload, decisions and processing cannot be made timely after the dynamics occur in the execution process. Second, horizontally speaking, each subsystem operates independently, and the data are not shared between subsystems, resulting in information silos.
(2) Insufficient real-time decision-making ability of the system to respond to dynamics. This mainly affects real-time decision-making from two aspects: on one hand, in the traditional IoT platform environment, the massive real-time data are uploaded to the cloud for processing. Its long delay may cause untimely decision-making. On the other hand, due to the lack of timely judgment on the dynamic level, dynamics that can be processed within the subsystem are also uploaded to the cloud for analysis and processing, and then no real-time decision-making is made.
(3) Failure of synchronization operation between subsystems. When the system is affected by dynamics, the system cannot quickly make the optimal decision as it lacks a dynamic level judgment and processing mechanism.
Therefore, the key technical challenges to resolve the above problems lie in how to obtain real-time data of the whole process, how to dynamically judge the process control requirements, and how to establish a synchronization decision-making mechanism between subsystems. These are the key points addressed in this paper.
4. Cloud-Edge-Terminal-Based Synchronized Decision-Making and Control System for Waste Collection and Transportation
To address the above three challenges, this paper extends the traditional IoT architecture and the cloud-side collaborative computing architecture to propose a multi-level computing based on “cloud-edge-terminal” synchronized decision-making and control system architecture for MSWCT. The following three aspects are introduced regarding the system architecture, equipment deployment, and system operation mechanism.
4.1. Introduction to the Framework and Modules of CET-SDCS for MSWCT
The overall architecture of the MSWCT system is divided into three layers, from bottom to top: terminal layer, edge layer, and cloud layer, as shown in Figure 2.
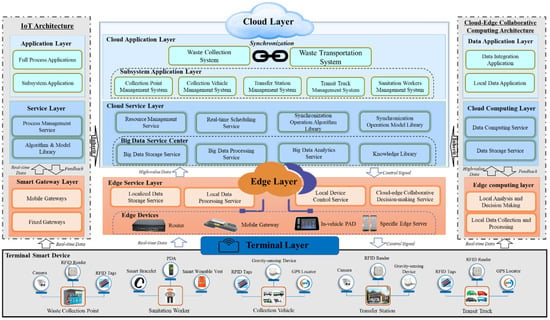
Figure 2.
CET-SDCS architecture for MSWCT.
4.1.1. Terminal Layer
The terminal layer is the bottom smart device layer of CET-SDCS for MSWCT, which is also equivalent to the sensing layer of IoT.
Here, terminal smart devices refer to the installation of IoT devices (such as FRID tags, gravity sensors, RFID readers, cameras, bracelets, GPS locators, etc.) on traditional trash bins, waste collection kiosks, collection vehicles, transfer stations, transit trucks, and other equipment and facilities, so that these equipment and facilities have active/passive sensing functions and become terminal smart devices. The terminal smart devices also include smart bracelets and PDA that may be used by sanitation workers.
The main function of the terminal layer is responsible for real-time data collection and transmitting information to the edge layer. After the data are analyzed and decided by the system, the results are fed back to the terminal layer, and the terminal layer executes the decision instructions.
4.1.2. Edge Layer
The edge layer is the second layer of CET-SDCS for MSWCT, including the edge device layer and the edge service layer.
- Edge device layer
The main devices in the edge device layer are routers, mobile gateways, in-vehicle PAD, and specific edge servers. The router is mainly suitable for installation at waste collection points with waste collection kiosks, and is responsible for storing, processing and analyzing the video monitoring data of waste collection points, the status data of trash bins, and the interaction data of the collection vehicles for pick-up. The mobile gateway is mainly suitable for sanitation workers to carry out and complete data collection and processing at collection points without waste collection kiosks. The in-vehicle PAD is mainly placed on the collection vehicles and transit trucks to collect and process vehicle operation status data, location data, load data, etc. The specific edge server is mainly placed in the transfer station and used to handle the interactive collection of the transfer link, including the information of vehicle incoming and outgoing, the amount of waste unloaded by the collection vehicle, the status of the transfer box, and the transfer box incoming and outgoing.
- Edge service layer
The edge service layer is mainly services provided by edge devices, including the local data storage service, local data processing service, local device control service, and the cloud edge collaborative decision-making service. The edge service layer has the autonomy to make decisions in the local scope, and it can make decisions quickly by analyzing the data and determining that the dynamic situation is within the edge decision processing scope. The situation beyond the decision range is handled by the cloud edge collaborative decision service. The cloud edge collaborative decision means that the edge pre-analyzes the real-time data and predicts that the dynamic situation is beyond the decision authority; then, the pre-analyzed results are fed back to the cloud for further analysis, and the cloud finally feeds the final analysis and decision results to the edge.
The main function of the edge layer is to assist the cloud in staging and pre-processing the data collected in the first layer to improve data quality and reduce the upload of redundant data, as well as to make decisions on local issues while communicating control instructions to the lower layers.
4.1.3. Cloud Layer
The cloud layer is the uppermost layer of CET-SDCS for MSWCT, including the cloud service layer and the cloud application layer.
- Cloud service layer
The cloud service layer mainly includes the big data service center, resource management service, real-time scheduling service, synchronization operation algorithm library, and the synchronization operation model library.
The big data service center is mainly for big data storage, big data processing, and big data analysis of high-quality data and system historical decision data uploaded by the edge service layer, and forms a knowledge base that can be invoked by the system at any time. The data, algorithms, and models of the big data service center can also be invoked and support the operation of other services at any time.
The resource management service mainly refers to the visual management service for real-time traceability and status of system resources.
The real-time scheduling service is mainly for system resource work task issuance, task execution process control, and task adjustment.
The library of synchronized operational algorithms includes multidisciplinary design optimization (MDO), such as cooperative optimization (CO), analytic target cascade (ATC), and augmented Lagrangian coordination (ALC), as well as various types of heuristic optimization algorithms, such as genetic algorithms (GA), ant colony algorithms (ACO), and artificial neural networks (ANN).
The library of synchronized operation model mainly includes the waste collection stage path optimization model, the waste transportation stage path optimization model, the grade determination analysis model of system dynamics, the waste collection and transportation synchronized decision model, etc.
The main function of this layer is to provide service support for the cloud application layer and decision analysis service for the edge layer. The operation logic is to retrieve the necessary data from the data center according to the application requirements of specific scenarios in the upper layer, and combine and match resources, algorithms, and models to provide specific decision analysis for application scenarios.
- Cloud application layer
The cloud application layer includes the subsystem application layer and the synchronization application layer.
The application layer of the sub-system includes: (1) the waste collection point management system, which is mainly applicable to the community property or sanitation management department (such as street office). It is used for the management of trash bins and waste collection kiosk equipment resources at all collection points, including the registration, operation status, visualization of equipment and supervision of resident drop-off behavior, etc. (2) The management system of collection vehicles is mainly used by third-party collection companies for the registration, operation status, location, driving path optimization and driving record analysis of all collection vehicles, etc. New third-party collection and transportation companies must first register in the system before they can start business. (3) The management system of transfer stations is mainly used by government sanitation management departments (such as street offices). The transfer station management system is mainly applied to the relevant departments of government sanitation management or the collection company which has its own transfer station. It is used to manage the location, operation status and irregularities of all transfer stations. (4) The transit truck management system is mainly used by transit companies to manage the transfer business and the operation status, location, and driving path of transit trucks.
The synchronized application layer is mainly the synchronized operation between the MSWCT system, and also includes the synchronized operation between the MSWCT system internal subsystems. According to the core roles of different subsystems in different scenarios, it can be divided into collection synchronization transportation, transportation synchronization collection, and collection and transportation bi-directional synchronization. The related synchronization mechanism will be introduced in detail in the later contents.
The basic function of the cloud application layer is to provide application systems to meet the internal business needs of different participating entities in the MSWCT system; in addition to that, the most important thing is to provide application systems to support the synchronized operation between the subsystems.
4.2. CET-SDCS for MSWCT Endpoint Smart Device and Edge Computing Device Deployment
This section will show how to deploy terminal smart devices and edge computing devices to capture, collect, and process real-time data at each key point of waste collection and transportation. As shown in Figure 3, the main steps of the device deployment route are as follows.
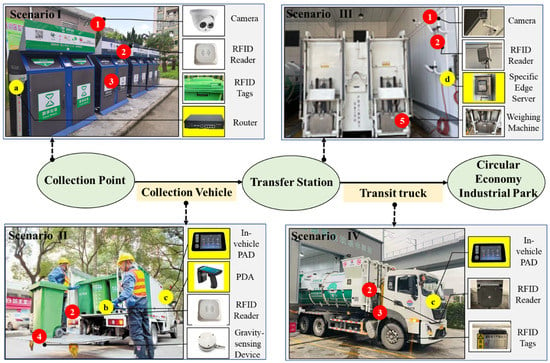
Figure 3.
Deployment of devices at CET-SDCS for MSWCT.
4.2.1. Terminal Smart Device Deployment
Terminal smart device deployment at collection points: as shown in Scenario Ⅰ in Figure 3, including a camera ①, RFID reader ② and RFID tag ⑤. (1) Camera deployment: mainly deployed at waste collection points for real-time monitoring of residents’ irregularities, as well as the overflow of trash bins, and when abnormalities are found timely alerts will be issued. For sporadic distributed small waste points, from the perspective of realistic cost, the conditions can be installed: cameras for real-time monitoring, and no camera points can contact the collection fleet through the system cell phone app. (2) RFID reader deployment: the fixed RFID readers in collection points will be deployed to automatically bind new empty trash bins when they enter the collection point and record the point location and merchant information into the RFID tag. For sporadically distributed small waste points, the points information can be manually bound by equipping PDAs to the workers of the collection stage when the trash bin has reached its collection capacity. (3) RFID tag deployment: the trash bin is the most important monitoring target in the waste collection process, and each waste bin must be deployed with an RFID tag.
Terminal smart device deployment on collection vehicles: as shown in Scenario Ⅱ in Figure 3, the devices deployed on each collection vehicle include the gravity-sensing device ④ and RFID readers ②. (1) The gravity-sensing device: the gravity-sensing devices are placed mainly at the rear of the collection vehicle, and the weight of each bin is recorded. (2) RFID readers: the RFID readers will record the merchant information of each trash bin and bind it with the weight information measured by the gravity-sensing device, and then transmit it to the on-board central control record.
Deployment of terminal smart devices in waste transfer stations: as shown in Scenario Ⅲ in Figure 3, the waste transfer station is a key data transition point, which is an important link between waste collection and transportation. The IoT devices deployed are mainly cameras ①, RFID readers ②, and weighing machines ⑤. (1) The cameras are deployed mainly to monitor illegal dumping behavior, as well as the safety monitoring of workers and vehicles in the waste transfer station. (2) The RFID reader is mainly installed in the waste transfer station entrance and internal, where the transfer station entrance RFID reader is mainly used to read the information of vehicles in and out, and the station internal RFID reader is mainly used to read the information of large waste containers in and out. (3) After entering the station, the trash bins unloaded by the collection vehicles are weighed by the weighing machine and the merchants information of the trash bins are read; then, the trash bins are transported by conveyor belt to the large waste transit container for dumping. In addition to this, gas monitoring equipment and liquid level monitoring equipment are deployed to prevent odor and liquid spillage.
Terminal smart device deployment on transit truck: as shown in Scenario Ⅳ in Figure 3, RFID readers ② and RFID tags ③, the IoT sensing devices, are deployed on each transit truck. (1) The RFID reader is mainly used to read the category, station, weight, and other information of the transit container. (2) The RFID tag is mainly attached to transit containers to facilitate information recording in and out of transfer stations.
4.2.2. Edge Computing Device Deployment
Edge computing device deployment at the collection points: as shown in scenario Ⅰ in Figure 3, the edge computing devices are mainly routers (a). All of the waste collection points have fixed network lines, and the routers can be deployed at the waste collection points to analyze and process the real-time video data.
Edge computing device deployment on the collection vehicles: as shown in scenario Ⅱ in Figure 3, the deployed edge computing devices are mainly PDA (b) and in-vehicle PAD (c). (1) PDA is equivalent to a mobile gateway, mainly used for sanitation workers of the collection stage to write data on sporadic waste collection points and assist RFID readers to read and analyze data. (2) In-vehicle PAD is responsible for storing and analyzing real-time data of the collection vehicles. Real-time data, including vehicle travel speed, location, tire pressure, and loading capacity.
Edge computing device deployment on the waste transfer station: as shown in scenario Ⅲ in Figure 3, the edge computing devices deployed are mainly specific edge servers (d) to store and process data of vehicles coming in and out, dumping waste volume, and containers coming in and out.
Edge computing device deployment on the transit truck: as shown in scenario Ⅳ in Figure 3, the in-vehicle PAD (c) is responsible for storing and analyzing real-time data of the transit truck, including the truck travel speed, position, tire pressure, and loading capacity.
In addition to the deployment of terminal smart devices and edge computing devices, it is also necessary to deploy related communication network equipment. The communication network is deployed using common 4G\5G, which is not described here, and can be deployed according to the actual demand.
4.2.3. System Process Reengineering
With the systematic deployment of smart devices and edge computing devices at each node of the MSWCT system and on transportation resources, an environment for real-time online decision making and control of the whole process of waste collection and transportation is created. The whole process of waste collection and transportation is redesigned to accommodate the intelligent environment.
The following highlights a few key operations in the reengineering process:
(1) The user of the waste collection point needs to send a demand for collection on the system’s mobile app to trigger collection.
(2) The planner of the waste collection company planning department receives an order, develops the collection scheme, and sends the scheme to the collection fleet and waste transfer stations manager.
(3) The sanitation workers (driver) of the collection fleet download the collection scheme through the in-vehicle PAD, and drive to the collection point to collect the waste according to the scheme.
(4) When the collection vehicle arrives at the collection point, the empty trash bins are first unloaded, and bound to the collection point with a PDA. Then, the filled trash bins are put on the vehicle, weighed, and the collection point information read, which will be recorded in the in-vehicle PAD.
(5) When the collection vehicle arrives at the waste transfer station, it will be automatically sensed and recognized by the RFID reader. After completing the inbound registration, sanitation workers move into the designated position to unload the waste. The trash bins are first weighed by the weighing machine, and the synchronized RFID reader reads the RFID tag information of the trash bins, which is uploaded to the specific edge server of the transfer station for processing. Then, the waste is automatically dumped into the container by the lift, and then the sanitation workers clean the trash bin and label information is released. The collection vehicle loads the empty trash bin, registers to leave the transfer station, and accepts the next collection task.
(6) The waste transfer station sends transit demand to the transit fleet based on the collection scheme sent by collection company and the real-time storage situation of the container.
(7) The planning department of the transit company receives the transit order, develops the transit scheme, and sends it to the transit fleet.
(8) The sanitation workers of the transit fleet download the transit scheme through the in-vehicle PAD, and drive to the transfer station to transit the waste as planned.
(9) When the transit truck arrives at the transfer station, it will be automatically sensed and recognized by the RFID reader. After completed the inbound registration, the on-board RFID reader reads the transfer container information and adds the information to the transit truck on-board central control to make records. When the truck leaves the station and the registration is complete, the transit truck drives to the final waste treatment plant.
(10) The transit truck arrives at the final waste treatment plant. After completing the registration of entering the plant, the unloading of waste is carried out. After the waste is unloaded, the container is transported back to the transfer station. The sanitation workers confirm the completion of the whole transfer work on the vehicle-mounted integrated machine and accept the next transit task.
The above is the basic operation of the system process reengineering. In the actual operation process, the system often faces a variety of internal and external dynamic disturbances. Therefore, this paper further proposes a synchronous operation mechanism to deal with various dynamic disturbances faced by the system operation.
4.3. Operation Mechanism of CET-SDCS for MSWCT
This section follows the basic idea of synchronization operation proposed by Qu et al. [30,36] in the field of intelligent manufacturing, and extends its application to the field of waste management. A set of synchronization decision-making mechanisms for the MSWCT system is proposed, which includes two steps: firstly, the dynamics level of the system is classified and a set of classification rules for the dynamics level is established; secondly, a set of synchronization decision-making mechanisms is designed for different levels of dynamics.
4.3.1. The Dynamics Classification of the MSWCT System in Cloud-Edge-Terminal Architecture
The scope of the dynamics impact of the MSWCT system on the system or each unit is marked as R. The value of R is determined by the responsive threshold (T[min,max]) of the dynamics acting on the system and the state at time T. Based on the value of R, the dynamics of the MSWCT system is classified into three levels, as follows:
First-level dynamics: When the impact of dynamic interference is less than the maximum responsive threshold for each unit within the MSWCT system (the collection point, the recycling waste pick-up of collection vehicles, the waste transfer, and the waste transit), i.e., when R is less than , the dynamics can be eliminated by task readjustment within the units.
Second-level dynamics: When the impact of dynamic interference is more than the maximum responsive threshold for each unit, i.e., when R is more than , the responsive ability of each unit is no longer able to respond to the dynamic impact on its own, and it needs to coordinate with other units to adjust tasks to deal with the dynamic impact.
Third-level dynamics: The impact of dynamic interference exceeds the responsive ability of multiple units collaboratively, i.e., the units cannot respond to the dynamic impact by readjusting tasks. At this time, it is necessary to call on external resources of the system, i.e., change the existing resource configuration (e.g., temporarily renting an external vehicle), to cope with the dynamic impact. (The third-level dynamics involves a game between the cost of bringing in external resources and the penalty cost for failure to fulfil orders. In this paper, the third-level dynamics is the case where the cost of calling in external resources is less than the penalty cost.)
According to the above classification rules for dynamics, examples of the dynamics encountered in the real operation of the MSWCT system and their levels are shown in Table 1.

Table 1.
The example of dynamics classification of the MSWCT system.
4.3.2. The Synchronization Decision-Making Mechanism of MSWCT System in Cloud-Edge-Terminal Architecture
The synchronization decision-making mechanism includes “three levels of synchronization, two stages of decision-making”, referred to as the “three levels, two stages” decision-making mechanism, as shown in Figure 4 and described in detail below.
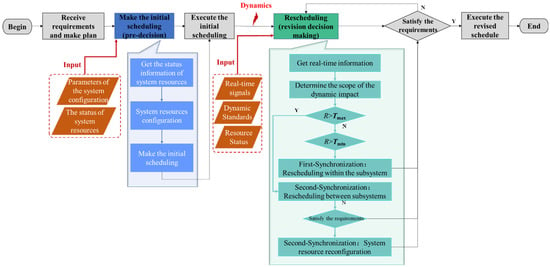
Figure 4.
“Three levels, two stages” synchronization mechanism description.
- Three levels of synchronization
“Three levels of synchronization” is a three-level synchronization decision-making method, including first-, second- and third-synchronization, in response to the dynamics of three different levels.
First-synchronization: When the dynamic is a first-level dynamic, the terminal smart device can get accurate information about the unit operation in real time and send the information to the edge computing device within the unit for analysis. On top of guaranteeing normal operation within the unit, the edge computing server schedules and optimizes the unit tasks to eliminate the dynamic impact so as not to affect the normal operation of other decision-making units.
Second-synchronization: When the dynamic is a second-level dynamic, the terminal smart device takes the acquired real-time information and feeds it back to the edge computing devices for pre-processing. After the information pre-processing is completed, the edge server sends it to the cloud server for analysis. On the premise of guaranteeing each units’ own interests, the cloud server can eliminate the dynamics by coordinating and changing the tasks and plans between the units to avoid affecting the stable operation at the system level.
Third-synchronization: When the dynamic is a third-level dynamic, the process of data collection, transmission, and pre-processing in the early stage is similar to that of second-synchronization processing, while the difference is the analytical processing in the cloud, where the algorithms and models of third-synchronization are more complex. After considering the full process optimization analysis, the system can eliminate the dynamics by re-scheduling system resources (e.g., vehicle scheduling between different collection companies) or adding new resources (e.g., temporarily renting or purchasing transportation and storage services).
- Two stages of decision-making
The two stages of decision-making includes two processes: initial scheduling (pre-decision) and rescheduling (revision decision making), as shown in Figure 4.
Initial scheduling: When the MSWCT system receives a collection order from a waste collection point, the synchronization service layer analyses, evaluates, and predicts the state of each subsystem component according to the requirements and constraints of the order, and determines the resource configuration, task assignment, and route planning according to the center of models to develop the waste collection and transit schemes. Then, the plan is transmitted to the main service systems. Each main service system proposes their own revisions after trade-offs and feedback to the synchronization service center of the system. This iteration is repeated until the system’s optimal collection and transit scheduling (initial scheduling) is obtained.
Rescheduling: After receiving the initial scheduling, the waste collection and transit company organize the collection, transfer (temporary storage), and transit activities according to the instructions. In the real execution process, if the terminal device monitors the occurrence of dynamic interference and determines that the dynamic difference is more than the terminal device’s predetermined degree, the dynamic response mechanism of the edge service layer is triggered first. If the dynamic difference exceeds the predetermined degree of the edge server, a request is made by the edge server to the cloud server, which determines the level of dynamics by analyzing. After determining the dynamics level, the cloud server analyzes and obtains the corresponding processing countermeasures and reformulates a revised planning scheme. Finally, the revised solution is obtained, and the instructions are transmitted to the terminal device layer for execution. The iteration is repeated until the end of the implementation task.
The “three levels, two stages” decision-making mechanism relying on the support of the cloud-edge-terminal architecture can quickly respond to the impact of the dynamics of the system and is the guarantee of the efficient operation of the system.
5. Case Study
This case takes the MSWCT system of a central street (Gongbei Street, Zhuhai City) in a key city node (a core city located on the west bank of China’s Pearl River Estuary and a coastal tourist city) in the Guangdong-Hong Kong-Macao Greater Bay Area as the research object. Gongbei Street covers a total area of 10.32 square kilometers, with a permanent population of 230,000 and dense residential buildings. The street boasts a developed service and catering industry, producing an average of about 230 tons of waste per day. Gongbei Street is one of the pioneers in Zhuhai to apply the management mode of waste collection and transportation after classification.
The street currently has 420 registered waste collection points, 20 waste transfer stations, 9 waste collection companies, and 1 waste transit company. In total, 50 tons of kitchen waste and 170 tons of other waste are collected on a daily basis. Hazardous waste and recyclables are not collected every day, with an average daily collection volume of about 0.1 ton and 17 tons, respectively.
The “waste collection and transportation” process in Gongbei Street is under the unified supervision of the Urban Refinement Management Office (hereinafter referred to as the Refinement Office) under the Street Office. Initially, the units are required to fill in the paper documents manually for registration in a traditional way, and then the Refinement Office collect the paper documents and import them into the computer for statistical analysis. In this mode, due to the low data collection efficiency, low accuracy, and poor real-time data, various dynamic disturbances may occur in the actual operation process. When a disturbance occurs, the three parties, including the collection company, the transit company, and the Street Office, cannot obtain real-time data of the system to make timely adjustments.
In order to solve the above-mentioned management decision-making problems, the Street entrusted a third-party information system company to develop an IoT-based visual management system for waste classification. By placing RFID tags on trash bins, installing in-vehicle PDAs on waste trucks, and equipping sanitation workers and transfer stations with RFID tag readers, the platform aims to achieve online management of the MSWCT system. Here we present the details and challenges of the system operation.
5.1. The Operation of the MSWCT System and Its Challenges
With the help of the waste visual management system, the Gongbei Street Office has established a six-step operation process of the MSWCT system.
Step 1: The property management company (PMC) or merchant managing the collection points determine the daily waste collection and transportation requirements for a fixed period (for example, one month) based on the empirical value of its own waste collection volume (assuming the daily collection and transportation volume is equal). Then, they convert the collection and transportation requirement into an order, which is sent to the collection company.
Step 2: The waste collection company (WCC) develops the monthly collection and transportation scheme according to received orders, and sends it to the collection fleet (the driver is responsible for driving the collection vehicle and clearing the waste).
Step 3: The collection workers check the monthly collection scheme through the PDA. Based on the method of cyclic pick-up, they drive to the collection point with empty bins to collect waste with a fixed route every day.
Step 4: The empty bins are removed from the vehicle, and information regarding collection points and trash bin types are written into the RFID tag of the trash bin through handheld terminals. The full waste bins are put onto the vehicle, and driven to the next collection point after loading.
Step 5: The collection vehicles are loaded up and driven to the nearest transfer station to unload. Weighing by an intelligent weighbridge is the first part of the unloading process, and the RFID tag information of the bin is automatically read and bound before being uploaded to the system. After loading the empty bin at the transfer station, a new round of collection and transportation begins until the task is complete.
Step 6: The transfer station manager collects statistics on the current carrying capacity of the waste transfer station. When the transfer station reaches the preset transit threshold, a shipping request is sent to the transit company.
Step 7: After the waste transit company (WTC) receives the transportation request, it develops a transit scheme and, in turn, transits the waste from the waste transfer station to the waste final treatment plant. After the whole vehicle is weighed in the treatment plant, the data are fed back to the Street Office’s Waste Classification Visualization Management System.
However, the street still faces three decision-making challenges: the acquisition of real-time data in the whole process, real-time dynamic decision making, and the synchronization of decision making among units.
Acquisition of real-time data in the whole process: The data currently obtained by the decision-making management of the Street Office are the execution results fed back by each subsystem. However, the real-time operation status data of trash bins, transfer stations, and transportation trucks involved in the whole process cannot be obtained.
Real-time dynamic decision-making: The current system adopts periodic decision making instead of real-time dynamic decision making. The actual implementation varies from day to day, and various dynamic disturbances are faced during the implementation process. When the system dynamic occurs, the system cannot monitor it, and can only take intervention measures after the dynamic impact results are produced.
Synchronization decision-making between units: Since there is no synchronization operation mechanism, the subsystems all make decisions independently. In the case of optimal operation of local subsystems, it is difficult to guarantee that the entire system works optimally because no synchronization relationship is established among units.
The main reasons for the above-mentioned challenges in the Gongbei Street Office are the lack of methods for acquiring real-time data during the whole process, methods for distributed data processing and decision making, and synchronization mechanisms and methods among system units. In response to these challenges, a project was launched with the support of Top Cloud Tech Co., Ltd., (Zhuhai, China) which provides system platform services for the Gongbei Street Office. By combining the ubiquitous perception architecture of IoT with the cloud-edge collaborative computing architecture, the project aims to build a synchronization system of real-time perception, multi-level collaborative computing and decision making for the whole process of waste collection and transportation. This project is highly aligned with the intelligent management strategy of waste classification promoted by the central government, and is a pilot project for the intelligent upgrading of waste classification in Zhuhai, which has won the recognition from the government department.
5.2. Re-Engineering Waste Collection and Transportation Operations
In order to adapt to the whole-process real-time perception and edge computing environment of IoT, the waste collection and transportation operation of the Gongbei Street Office was re-engineered with the help of CET-SDCS for MSWCT. Details are as shown in Figure 5 below.
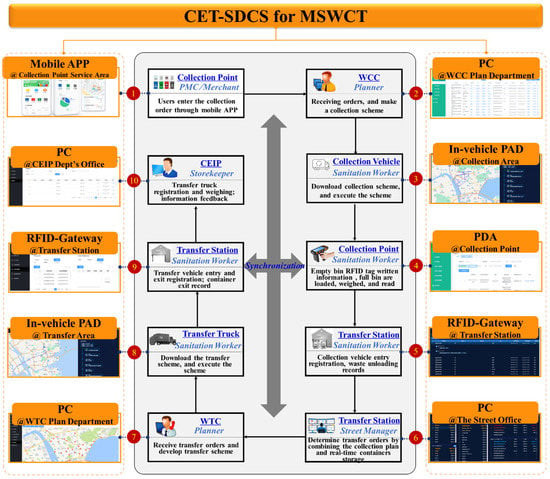
Figure 5.
Re-engineered process with CET-SDCS for MSWCT.
(1) The management persons at the waste collection point (such as property management persons, and merchants) issue collection and transportation orders through the system mobile app. Therefore, some disturbances, such as urgent collection and transportation orders from merchants, can be handled in real time.
(2) The planner of the WCC’s planning department receives an order, develops the collection and transportation plan according to the use of the company’s resources, and sends the plan to the fleet. The collection and transportation plan determines the departure time, driving route, and transfer station location for unloading.
(3) The sanitation workers of the collection and transportation fleet download the collection and transportation scheme through the in-vehicle PAD, and go to the collection point to collect and transport the waste according to the scheme.
(4) When the collection vehicle arrives at the collection point, the empty trash bins are unloaded and bound to the collection point with a handheld mobile terminal/fixed RFID reader. The filled trash bin on put on the vehicle, weighed, and the collection point information read, which is be recorded in the in-vehicle PAD. If the weight is inconsistent with the planned amount, the in-vehicle PAD will send a signal of abnormal amount of waste to the system. After the vehicle is full, it drives to the nearest transfer station to unload. (As different types of waste have different characteristics, the collection and transportation forms are also different. For example, food waste is mostly transported with bins, which need to be changed. Bins are not required to be changed for other waste, but the basic process is the same. Take kitchen waste as an example in this paper.)
(5) When the collection vehicle arrives at the transfer station, it will be automatically sensed and recognized by the gate. After detection, the vehicle drives into the designated position to unload the waste. The waste is weighed, and the information of the trash bin is read and matched with the information that was recorded in the in-vehicle PAD. The operation process also includes dumping of the full waste trash bin, waste compression, empty bin cleaning, label information release, empty bin loading, and vehicle departure. The next cycle is started after completing the above operations.
(6) The waste transfer station downloads the collection and transportation scheme, and develops a waste transit order based on the actual waste volume. As such, some dynamic disturbances can be avoided.
(7) The planning department of the transit company receives the transit order, develops the transfer plan based on the internal vehicle status, and sends the transit plan to the transit fleet. The transit plan confirms the departure time of the transit truck, the sequence of the transit at the transfer station, and the driving route of the truck.
(8) The sanitation workers of the transit fleet download the transit plan through the in-vehicle PAD, and go to the transfer station to transit the waste as planned.
(9) When the transit truck arrives at the transfer station, it will be automatically sensed and recognized by the gate. After the detection, the transit truck enters the designated position to load the waste transfer box. The system automatically senses that the waste transfer box leaves the position, and the gate records the departure of the truck and the waste transfer box.
(10) The transit truck carries the waste transfer box to the final waste treatment plant. After the admission registration, the intelligent weighing device automatically reads the waste transfer box information, binds it with the weight information, and uploads the information to the system. The transit truck returns to the previous transfer station with the new empty transfer box and starts another round of transfer.
5.3. Benefits of CET-SDCS for MSWCT
Using the CET-SDCS for MSWCT, Gongbei Street can acquire real-time data of the whole process of waste collection and transportation and monitor the operation status in real time. At the same time, the real-time data collected by the terminal smart device is processed and analyzed through the edge computing device, which avoids redundant data uploading to the cloud, relieves the pressure on the network bandwidth and cloud data center, and greatly reduces the time delay of the system. It has improved the street’s response speed to different levels of dynamics, and realized the synchronization of decision making among multiple units. It has also significantly improved the operating efficiency of the system, and reduced the operating costs of waste collection and transportation. The details are shown in Table 2.
Table 2.
Efficiency and cost effectiveness of CET-SDCS for MSWCT.
In terms of the operating efficiency of the system, taking kitchen waste collection vehicles as an example, before the implementation of the project, the total collection volume of each vehicle per day was up to 6 tons, which increased to 18 tons after the implementation of the project. With the same number of vehicles, the transportation capacity of the collection and transportation fleet has been increased three-fold. In addition, the frequency of departures has also been reduced from 520 shifts per month before the implementation of the project to 436 shifts per month after the implementation, an average reduction of 84 shifts per month, with a year-on-year decrease of 16.15%.
In terms of cost saving, before the implementation of the project, the annual collection and transportation cost was CNY 6.24 million, and the operation and management cost of the transfer station was CNY 2.7 million. After the implementation, the annual collection and transportation cost is CNY 5.232 million, with a year-on-year decrease of 16.15%. The annual operation and management cost of the transfer station is CNY 2 million with a year-on-year decrease of 25.93%. The cumulative cost saving is CNY 1.708 million per year.
Although CET-SDCS has many of the above advantages, the initial investment cost of CET-SDCS is relatively large, and the main cost increase comes from the investment of a large number of edge computing devices. In the future, with the development and maturity of edge computing technology, the cost of CET-SDCS will gradually decrease.
6. Conclusions
This paper introduces the CET-SDCS for MSWCT, which can be applied by government sanitation departments and participating enterprises in different units involving waste classification. Both government departments and participating enterprises are faced with the challenges of acquiring real-time data during the whole process, dynamically judging process control requirements, and a lack of synchronized decision-making mechanism among subsystems in the operation of the MSWCT system. The entire waste collection and transportation scheme and progress are subject to many dynamic disturbances. Intelligent terminals and edge computing devices are systematically deployed at each key node of the MSWCT system to create an environment for real-time online decision making and control during the whole process of waste collection and transportation. Under an intelligent environment, the resources of the MSWCT system are transformed into intelligent objects that can be tracked. We can collect operating status data and perceive the occurrence of dynamics in real time. CET-SDCS for MSWCT supports the synchronized decision making and control of the system in a dynamic environment with real-time information. We developed a set of three-level dynamic hierarchical rules for the MSWCT system. Moreover, the cloud-edge-terminal multi-level computing architecture is used to collaboratively analyze and process different dynamics. We proposed a “three-level and two-stage” synchronized decision-making mechanism suitable for the MSWCT system. By implementing CET-SDCS for MSWCT system, we can not only improve the response speed of the system to dynamics of different levels in the operation process, and realize the synchronized decision making among multiple units, but we can also significantly improve system operating efficiency and cut operating costs.
This paper mainly explores the innovative applications of cloud-edge collaborative computing technologies and IoT technologies in the field of waste logistics operation management. Firstly, intelligent terminals and edge computing devices are systematically deployed to the key units of the MSWCT system, which realizes the acquisition of insensitive data during the whole process, and eliminates the phenomenon of non-sharing of information within and between units. Secondly, the dynamic disturbances affecting the operation of the MSWCT system are captured by IoT devices, and computed and analyzed through the cloud-edge collaborative computing architecture to establish the matching relationship between cloud-edge decision rights and different dynamic levels, and enable fast decision making for dynamics of different levels. Thirdly, the idea of synchronized operation is applied to the operation and management of waste logistics, which realizes the synchronized decision-making between the waste collection stage and the transportation stage, and the overall optimization of the system.
Future research work will answer the following questions. The first question is how to use the historical data of the system to establish a big data prediction model and a dynamic disturbance prediction model for the amount of waste generated, with an aim to prevent the dynamic occurrence in advance. The second question is how to achieve a better allocation of system resources under the synchronized operation environment. The third question is how to improve the convenience of introducing external resources of the system and achieve the business symbiosis of multi-stakeholders.
Author Contributions
Conceptualization, T.Q. and G.Q.H.; Data curation, X.Q., J.Z. and J.C.; Formal analysis, M.H. and X.Q.; Funding acquisition, T.Q. and J.C.; Investigation, M.W.; Methodology, M.W. and T.Q.; Project administration, M.W.; Resources, T.Q. and G.Q.H.; Writing—original draft, M.W.; Writing—review & editing, M.W. and M.H. All authors have read and agreed to the published version of the manuscript.
Funding
This paper was financially supported by the National Natural Science Foundation of China (51875251, 52205526), the National Key Research and Development Program of China (2021YFB3301701), the 2019 Guangdong Special Support Talent Program—Innovation and Entrepreneurship Leading Team (China) (2019BT02S593), the 2018 Guangzhou Leading Innovation Team Program (China) (201909010006), and the Science and Technology Development Fund (Macau SAR) (0078/2021/A). We also appreciate the sponsorships from the Zhuhai Top Cloud Tech Co., GBA and B&R International Joint Research Center for Smart Logistics, a provincial research lab sponsored by the Department of Science and Technology of Guangdong Province, thanks to which the international collaboration has been effectively conducted.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, A.; Wang, J.X.; Farooque, M.; Wang, Y.; Choi, T.M. Multi-dimensional circular supply chain management: A comparative review of the state-of-the-art practices and research. Transp. Res. Pt. E-Logist. Transp. Rev. 2021, 155, 102509. [Google Scholar] [CrossRef]
- Zhou, M.H.; Shen, S.L.; Xu, Y.S.; Zhou, A.N. New policy and implementation of municipal solid waste classification in Shanghai, China. Int. J. Environ. Res. Public Health 2019, 16, 3099. [Google Scholar] [CrossRef] [PubMed]
- Akhtar, M.; Hannan, M.A.; Begum, R.A.; Basri, H.; Scavino, E. Backtracking search algorithm in CVRP models for efficient solid waste collection and route optimization. Waste Manag. 2017, 1, 117–128. [Google Scholar] [CrossRef]
- Yadav, V.; Karmakar, S. Sustainable collection and transportation of municipal solid waste in urban centers. Sust. Cities Soc. 2020, 53, 101937. [Google Scholar] [CrossRef]
- Li, Y.P.; Huang, G.H.; Cui, L.; Liu, J. Mathematical Modeling for Identifying Cost-Effective Policy of Municipal Solid Waste Management under Uncertainty. J. Environ. Inform. 2019, 34, 55–67. [Google Scholar] [CrossRef]
- Cleophas, C.; Cottrill, C.; Ehmke, J.F.; Tierney, K. Collaborative urban transportation: Recent advances in theory and practice. Eur. J. Oper. Res. 2019, 273, 801–816. [Google Scholar] [CrossRef]
- Shao, S.; Xu, S.X.; Huang, G.Q. Variable neighborhood search and tabu search for auction-based waste collection synchronization. Transp. Res. Pt. B-Methodol. 2020, 133, 1–20. [Google Scholar] [CrossRef]
- Anagnostopoulos, T.; Zaslavsky, A.; Kolomvatsos, K.; Medvedev, A.; Amirian, P.; Morley, J.; Hadjiefthymiades, S. Challenges and opportunities of waste management in IoT-enabled smart cities: A survey. IEEE Trans. Sustain. Comput. 2017, 2, 275–289. [Google Scholar] [CrossRef]
- Thürer, M.; Pan, Y.H.; Qu, T.; Luo, H.; Li, C.D.; Huang, G.Q. Internet of Things (IoT) driven kanban system for reverse logistics: Solid waste collection. J. Intell. Manuf. 2019, 30, 2621–2630. [Google Scholar] [CrossRef]
- Zhang, A.; Venkatesh, V.G.; Liu, Y.; Wan, M.; Qu, T.; Huisingh, D. Barriers to smart waste management for a circular economy in China. J. Clean Prod. 2019, 240, 118198. [Google Scholar] [CrossRef]
- Pardini, K.; Rodrigues, J.J.P.C.; Kozlov, S.A.; Kumar, N.; Furtado, V. IoT-Based Solid Waste Management Solutions: A Survey. J. Sens. Actuator Netw. 2019, 8, 5. [Google Scholar] [CrossRef]
- Salehi-Amiri, A.; Akbapour, N.; Hajiaghaei-Keshteli, M.; Gajpal, Y.; Jabbarzadeh, A. Designing an effective two-stage, sustainable, and IoT based waste management system. Renew. Sust. Energ. Rev. 2022, 157, 112031. [Google Scholar] [CrossRef]
- Nabavi-Pelesaraei, A.; Bayat, R.; Hosseinzadeh-Bandbafha, H.; Afrasyabi, H.; Chau, K.W. Modeling of energy consumption and environmental life cycle assessment for incineration and landfill systems of municipal solid waste management-A case study in Tehran Metropolis of Iran. J. Clean Prod. 2017, 148, 427–440. [Google Scholar] [CrossRef]
- Nabavi-Pelesaraei, A.; Bayat, R.; Hosseinzadeh-Bandbafha, H.; Afrasyabi, H.; Berrada, A. Prognostication of energy use and environmental impacts for recycle system of municipal solid waste management. J. Clean Prod. 2017, 154, 602–613. [Google Scholar] [CrossRef]
- Mishra, M.; Hota, S.K.; Ghosh, S.K.; Sarkar, B. Controlling waste and carbon emission for a sustainable closed-loop supply chain management under a cap-and-trade strategy. Mathematics 2020, 8, 466. [Google Scholar] [CrossRef]
- Nabavi-Pelesaraei, A.; Mohammadkashi, N.; Naderloo, L.; Abbasi, M.; Chau, K.W. Principal of environmental life cycle assessment for medical waste during COVID-19 outbreak to support sustainable development goals. Sci. Total Environ. 2022, 827, 154416. [Google Scholar] [CrossRef]
- Jacobsen, R.; Willeghems, G.; Gellynck, X.; Buysse, J. Increasing the Quantity of Separated Post- consumer Plastics for Reducing Combustible Household Waste: The Case of Rigid Plastics in Flanders. Waste Manag. 2018, 78, 708–716. [Google Scholar] [CrossRef]
- Li, Y.; Peyman, M.; Panadero, J.; Juan, A.A.; Xhafa, F. IoT Analytics and Agile Optimization for Solving Dynamic Team Orienteering Problems with Mandatory Visits. Mathematics 2022, 10, 982. [Google Scholar] [CrossRef]
- Faccio, M.; Persona, A.; Zanin, G. Waste collection multi objective model with real time traceability data. Waste Manag. 2011, 31, 2391–2405. [Google Scholar] [CrossRef]
- Mamun, M.A.; Hannan, M.A.; Hussain, A.; Basri, H. Theoretical model and implementation of a real time intelligent bin status monitoring system using rule based decision algorithms. Expert Syst. Appl. 2016, 48, 76–88. [Google Scholar] [CrossRef]
- Yusof, N.M.; Zulkifli, M.F.; Yusof, M.; Azman, A.A. Smart Waste Bin with Real-time Monitoring System. Int. J. Eng Technol. 2018, 7, 725–729. [Google Scholar] [CrossRef]
- Ramos, T.R.P.; de Morais, C.S.; Barbosa-Póvoa, A. The Smart Waste Collection Routing Problem: Alternative Operational Management Approaches. Expert Syst. Appl. 2018, 103, 146–158. [Google Scholar] [CrossRef]
- Idwan, S.; Mahmood, I.; Zubairi, J.A.; Matar, I. Optimal Management of Solid Waste in Smart Cities Using Internet of Things. Wirel. Pers. Commun. 2020, 110, 485–501. [Google Scholar] [CrossRef]
- Armbrust, M.; Fox, A.; Griffith, R.; Joseph, A.D.; Katz, R.; Konwinski, A.; Lee, G.; Patterson, D.; Rabkin, A.; Stoica, I. A view of cloud computing. Commun. ACM 2010, 53, 50–58. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, X.; Wang, Y.; Zhang, Q. Edge Computing: State-of-the-Art and Future Directions. J. Comput. Res. Develop. 2019, 56, 69–89. [Google Scholar]
- Satyanarayanan, M. The emergence of edge computing. Computer 2017, 50, 30–39. [Google Scholar] [CrossRef]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge computing: Vision and challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Yousefpour, A.; Fung, C.; Nguyen, T.; Kadiyala, K.; Jalali, F.; Niakanlahiji, A.; Kong, J.; Jue, J.P. All one needs to know about fog computing and related edge computing paradigms: A complete survey. J. Syst. Architect. 2019, 98, 289–330. [Google Scholar] [CrossRef]
- Botta, A.; De Donato, W.; Persico, V.; Pescapé, A. Integration of cloud computing and internet of things: A survey. Futur. Gener. Comp. Syst. 2016, 56, 684–700. [Google Scholar] [CrossRef]
- Qu, T.; Zhang, K.; Luo, H.; Wang, Z.; Jia, D.; Chen, X.; Huang, G.Q.; Li, X. Internet-of-things based dynamic synchronization of production and logistics: Mechanism, System and Case Study. Chin. J. Mech. Eng. 2015, 51, 36–44. [Google Scholar] [CrossRef]
- Qu, T.; Lei, S.P.; Wang, Z.Z.; Nie, D.X.; Chen, X.; Huang, G.Q. IoT-based real-time production logistics synchronization system under smart cloud manufacturing. Int. J. Adv. Manuf. Technol. 2016, 84, 147–164. [Google Scholar] [CrossRef]
- Luo, H.; Wang, K.; Kong, X.T.R.; Lu, S.; Qu, T. Synchronized production and logistics via ubiquitous computing technology. Robot. Comput.-Integr. Manuf. 2017, 45, 99–115. [Google Scholar] [CrossRef]
- Noroozi, A.; Mazdeh, M.M.; Heydari, M.; Barzoki, M.R. Coordinating order acceptance and integrated production-distribution scheduling with batch delivery considering Third Party Logistics distribution. J. Manuf. Syst. 2018, 46, 29–45. [Google Scholar] [CrossRef]
- Pan, Y.H.; Qu, T.; Wu, N.Q.; Qu, T.; Li, P.Z.; Zhang, K.; Guo, H.F. Digital Twin Based Real-time Production Logistics Synchronization System in a Multi-level Computing Architecture. J. Manuf. Syst. 2020, 58, 246–260. [Google Scholar] [CrossRef]
- Ghiani, G.; Manni, A.; Manni, E.; Moretto, V. Optimizing a waste collection system with solid waste transfer stations. Comput. Ind. Eng. 2021, 161, 107618. [Google Scholar] [CrossRef]
- Qu, T.; Zhang, K.; Li, C. Synchronized Decision-making and Control Method for Opti-state Execution of Dynamic Production Systems with Internet of Things. Chin. J. Mech. Eng. 2018, 54, 24–33. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).